Область техники
Настоящее изобретение относится к устройству и способу для управления движением транспортного средства для информирования водителя относительно прогнозируемых состояний вождения, в которых управляется транспортное средство.
Уровень техники
В публикации JP 2011-185951 описана технология разделения целевого маршрута на раскрашенные участки в зависимости от расстояния от текущей позиции рассматриваемого транспортного средства до направляющей точки (например, перекрестка).
Техническая задача
Технология, описанная в JP 2011-185951, не позволяет в достаточной степени водителю распознавать то, что рассматриваемое транспортное средство находится либо в состоянии приведения в движение или ускорения, либо в состоянии торможения или замедления, впереди текущей позиции.
Задача настоящего изобретения заключается в том, чтобы создать устройство управления движением и способ управления движением транспортного средства для предоставления заранее инструкций для водителя, указывающих на то, в каком состоянии должно быть рассматриваемое транспортное средство: либо в состоянии приведения в движение или ускорения, либо в состоянии торможения или замедления.
Решение задачи
Для решения вышеописанной задачи, настоящее изобретение отображает, на модуле отображения, изображение маршрута, соответствующее прогнозируемому маршруту движения, заданному для рассматриваемого транспортного средства в режиме отображения, соответствующем движущей силе и/или тормозной силе рассматриваемого транспортного средства или ускорению и/или замедлению рассматриваемого транспортного средства.
Преимущества изобретения
Устройство управления движением и способ управления движением транспортного средства согласно настоящему изобретению позволяют предоставлять инструкции для водителя, указывающие на то, в каком состоянии должно быть рассматриваемое транспортное средство: либо в состоянии приведения в движение или ускорения, либо в состоянии торможения или замедления.
Краткое описание чертежей
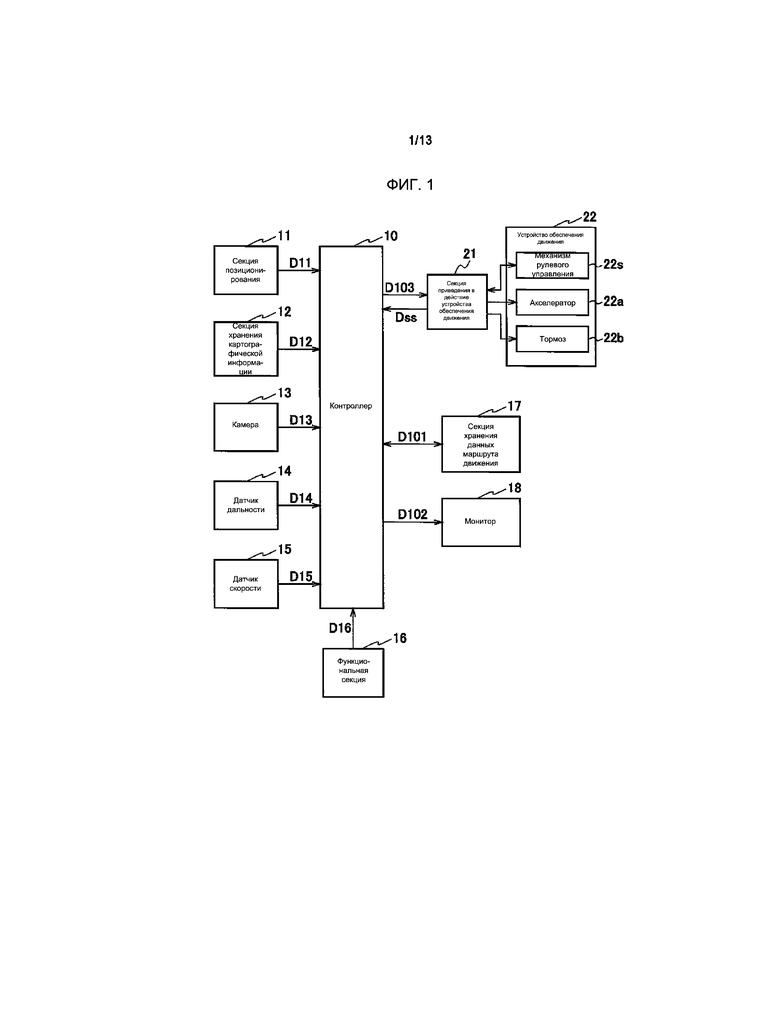
Фиг. 1 - блок-схема, показывающая устройство управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 2 - вид в перспективе, показывающий пример транспортного средства, на котором установлено устройство управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 3 - вид, показывающий каждый фрагмент информации, включенный в картографическую информацию, используемую в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 4 - блок-схема, показывающая внутреннюю функциональную конфигурацию контроллера 10, показанного на фиг. 1;
Фиг. 5 - вид для пояснения краткого представления плана движения, составляемого посредством устройства и способа для управления движением транспортного средства согласно варианту осуществления изобретения;
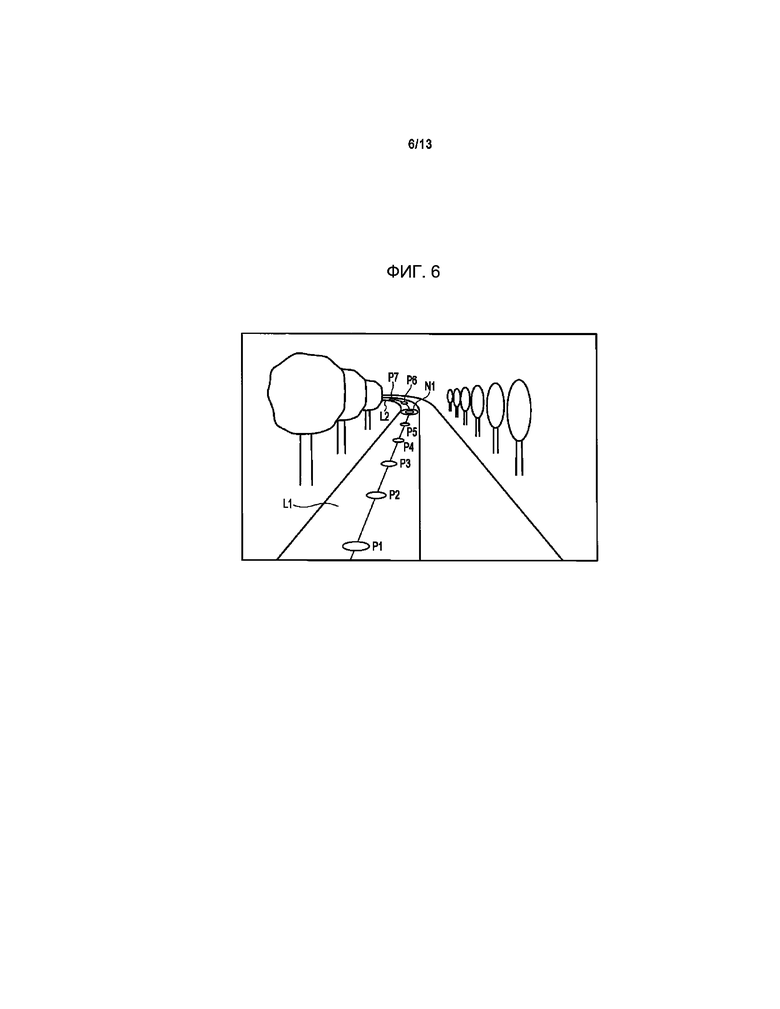
Фиг. 6 - вид, схематично показывающий состояние, в котором движется транспортное средство, согласно плану движения, показанному на фиг. 5;
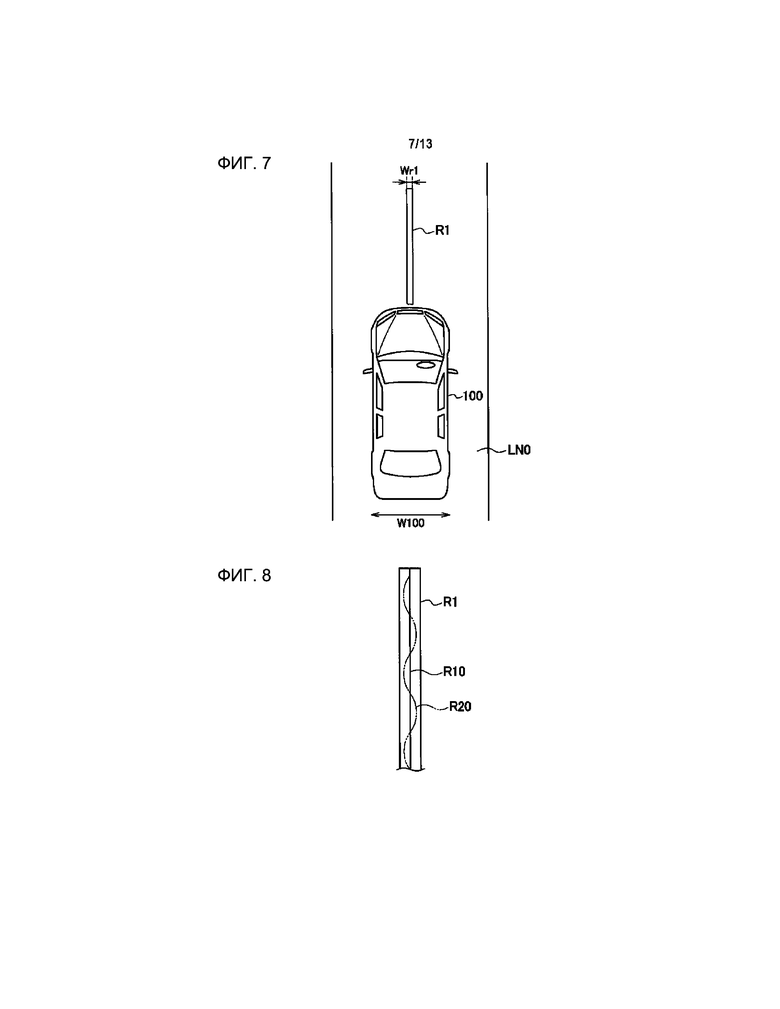
Фиг. 7 - вид, показывающий первый пример прогнозируемой линии движения, используемой в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 8 - вид для пояснения подробностей первого примера прогнозируемой линии движения, показанной на фиг. 7;
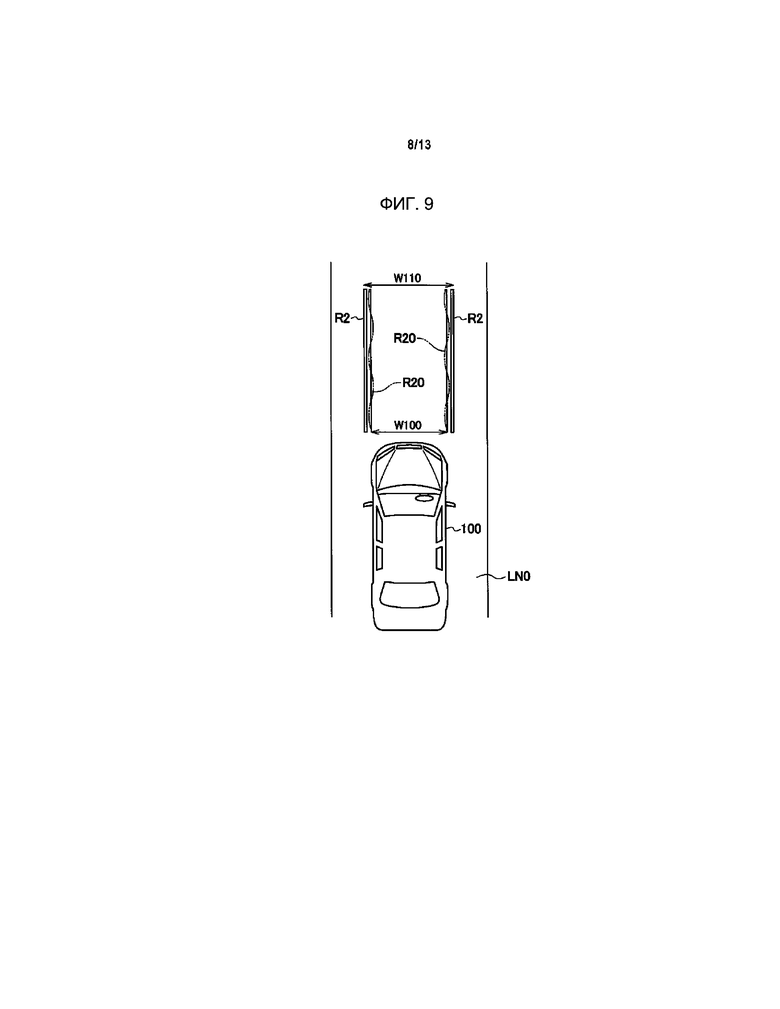
Фиг. 9 - вид, показывающий второй пример прогнозируемой линии движения, используемой в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 10 - вид, показывающий первый пример изображения плана движения, указывающего состояние приведения в движение на постоянной скорости и состояние замедления, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 11 - вид, показывающий первый пример изображения плана движения, указывающего состояние приведения в движение на постоянной скорости и состояние ускорения, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 12 - вид, показывающий второй пример изображения плана движения, указывающего состояние приведения в движение на постоянной скорости и состояние замедления, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 13 - вид, показывающий второй пример изображения плана движения, указывающего состояние приведения в движение на постоянной скорости и состояние ускорения, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 14 - вид, показывающий третий пример изображения плана движения, указывающего состояние ускорения и состояние замедления, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 15 - вид, показывающий четвертый пример изображения плана движения, указывающего состояние ускорения, состояние замедления и состояние движения накатом по инерции, используемые в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения;
Фиг. 16 - блок-схема последовательности операций способа, показывающая работу устройства и способа для управления движением транспортного средства согласно варианту осуществления и процесс способа управления движением транспортного средства согласно варианту осуществления изобретения; и
Фиг. 17 - вид, показывающий пятый пример изображения плана движения, используемого в устройстве и способе для управления движением транспортного средства согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе поясняются устройство управления движением и способ управления движением транспортного средства согласно варианту осуществления в отношении прилагаемых чертежей. Устройство управления движением транспортного средства согласно варианту осуществления устанавливается, например, на транспортном средстве 100, показанном на фиг. 2. В нижеприведенном описании, транспортное средство 100 проиллюстрировано в качестве транспортного средства с поддержкой автономного вождения, допускающего автономное вождение, управляемое посредством самого транспортного средства 100, даже когда водитель не присутствует в нем.
Секция 11 позиционирования, показанная на фиг. 1, получает текущую позицию транспортного средства 100. Секция 11 позиционирования принимает GPS-радиоволны, излучаемые из GPS-спутника, посредством GPS-антенны 11a, показанной на фиг. 2, чтобы получать текущую позицию транспортного средства 100. Данные D11 позиционирования текущей позиции транспортного средства 100, полученные посредством секции 11 позиционирования, вводятся в контроллер 10.
Секция 11 позиционирования может получать текущую позицию транспортного средства 100 посредством средства позиционирования, такого как гироскоп, вместо GPS. Секция 11 позиционирования может получать текущую позицию транспортного средства 100 посредством комбинации GPS и гироскопа. Функция секции 11 позиционирования может реализовываться в контроллере 10.
Секция 12 хранения картографической информации сохраняет картографическую информацию. Картографическая информация может представлять собой трехмерную информацию. Секция 12 хранения картографической информации может представлять собой необязательный носитель хранения данных, такой как жесткий диск, полупроводниковое запоминающее устройство или оптический диск. Картографические данные D12, выводимые из секции 12 хранения картографической информации, вводятся в контроллер 10.
Как показано на фиг. 3, картографические данные D12 включают в себя несколько фрагментов информации в качестве картографической информации. Картографические данные D12 включают в себя информацию D12N узлов, указывающую перекрестки или узлы между дорогами, и информацию D12L отрезков в отношении отрезков, соответствующих участкам дороги между узлами, указываемыми посредством информации D12N узлов. Картографические данные D12 включают в себя информацию D12s об ограничении скорости относительно ограничения скорости в соответствующих отрезках (а именно, в соответствующих участках дороги).
Картографические данные D12 могут включать в себя информацию D12H высоты над уровнем моря. Контроллер 10 может получать градиент дороги, по которой движется транспортное средство 100, на основе информации D12H высоты над уровнем моря. Контроллер 10 может получать градиент дороги на основе GPS-радиоволн. Картографические данные D12 включают в себя информацию D12E окружающих объектов дороги, такую как здания вокруг дорог. Информация окружающих объектов дороги предполагается как трехмерная информация.
Как показано на фиг. 2, транспортное средство 100 оснащено внутри камерой 13 для формирования изображений наружной обстановки спереди от транспортного средства 100. Камера 13 снимает окрестности впереди таким образом, что они включают в себя дорогу, по которой движется транспортное средство 100, под углом обзора. Фиксированная позиция камеры 13 не ограничена позицией, показанной на фиг. 2. Хотя на фиг. 2 проиллюстрирован пример, в котором предоставляется одна камера 13, вместо этого может предоставляться стереокамера, включающая в себя две камеры 13. Данные D13 формирования изображений окрестностей впереди транспортного средства 100 снятые посредством камеры 13, вводятся в контроллер 10.
Датчик 14 дальности присоединен к транспортному средству 100, например, внутри решетки радиатора. Датчик 14 дальности может включать в себя лазерный радар или миллиметровый волновой радар. Датчик 14 дальности измеряет расстояние между транспортным средством 100 и объектом, присутствующим впереди транспортного средства 100. Данные D14 системы определения дальности, полученные посредством датчика 14 дальности, вводятся в контроллер 10.
Датчик 14 дальности используется для того, чтобы определять помехи, расположенные впереди транспортного средства 100. Помехи, расположенные впереди транспортного средства 100, включают в себя помеху, движущуюся перед транспортным средством 100. Едущее впереди транспортное средство, движущееся перед транспортным средством 100, представляет собой одну из помех. Контроллер 10 определяет помеху на основе данных D14 системы определения дальности. Контроллер 10 может определять объект на основе данных D14 системы определения дальности и данных D13 формирования изображений. Контроллер 10 может определять объект только на основе данных D13 формирования изображений.
Транспортное средство 100 включает в себя датчик 15 скорости для определения скорости движущегося транспортного средства 100. Датчик 15 скорости представляет собой секцию определения скорости для определения скорости транспортного средства 100 и представляет собой, например, датчик скорости вращения колес. Данные D15 скорости, полученные посредством датчика 15 скорости, вводятся в контроллер 10.
После того, как водитель управляет функциональной секцией 16 таким образом, чтобы задавать пункт назначения, данные D16 задания пункта назначения вводятся в контроллер 10. Функциональная секция 16 может задавать другую информацию, необходимую для навигации на основе инструкций по маршруту, отличную от пункта назначения, такую как транзитная точка или дорога, которой присвоен приоритет над другими. Когда другая информация задается, данные D16 задания также применяются с данными задания другой информации.
Контроллер 10 формирует данные D101 маршрута движения относительно маршрута от текущей позиции до пункта назначения на основе данных D11 позиционирования, картографических данных D12 и данных D16 задания. Данные D101 маршрута движения сохраняются в секции 17 хранения данных маршрута движения. Секция 17 хранения данных маршрута движения представляет собой энергонезависимое запоминающее устройство.
Как описано ниже, в устройстве и способе для управления движением транспортного средства согласно варианту осуществления, контроллер 10 формирует данные D102 формирования изображений плана движения, визуально указывающие то, как состояние движения транспортного средства 100 управляется на основе данных D101 маршрута движения и соответствующих фрагментов информации, описанных ниже.
Данные D102 изображений плана движения получаются таким образом, чтобы накладывать прогнозируемую линию движения, по которой движется транспортное средство 100, и изображение различения состояний движения на изображение, снятое камерой, в данных D13 формирования изображений, полученных посредством камеры 13.
Изображение различения состояний движения указывает состояние движения из либо состояния приведения в движение, в котором транспортное средство 100 движется при приложении движущей силы, либо состояния торможения, в котором транспортное средство 100 движется при приложении тормозной силы. Изображение различения состояний движения может указывать состояние движения из либо состояния ускорения, в котором транспортное средство 100 ускоряется, либо состояния замедления, в котором транспортное средство 100 замедляется, независимо от того, находится транспортное средство 100 в состоянии приведения в движение или в состоянии торможения. Ниже подробно поясняется изображение плана движения, включенное в данные D102 изображений плана движения.
Контроллер 10 подает данные D102 изображений плана движения на монитор 18 (модуль отображения).
Транспортное средство 100 включает в себя устройство 22 обеспечения движения для обеспечения движения транспортного средства 100. Устройство 22 обеспечения движения включает в себя механизм 22s рулевого управления, акселератор 22a и тормоз 22b. Устройство 22 обеспечения движения может включать в себя трансмиссию, например, передачи для ускорения и замедления. Секция 21 приведения в действие устройства обеспечения движения приводит в действие устройство 22 обеспечения движения в соответствии с управлением посредством контроллера 10.
Ниже поясняются конкретные операции контроллера 10 со ссылкой на фиг. 4. Фиг. 4 показывает внутреннюю функциональную конфигурацию контроллера 10. Контроллер 10 может включать в себя микрокомпьютер. Операции контроллера 10, описанные ниже, могут реализовываться посредством компьютерной программы.
Как показано на фиг. 4, данные D11 позиционирования, картографические данные D12 и данные D16 задания вводятся в секцию 101 формирования данных маршрута движения. Секция 101 формирования данных маршрута движения формирует, на основе картографических данных D12, данные D101 маршрута движения, указывающие прогнозируемый маршрут движения от текущей позиции, указываемой посредством данных D11 позиционирования, до пункта назначения, указываемого посредством данных D16 задания.
Данные D101 маршрута движения сохраняются в секции 17 хранения данных маршрута движения, и часть данных в данных D101 маршрута движения, необходимых для навигации на основе инструкций по маршруту в ассоциации с движением транспортного средства 100, считывается из секции 17 хранения данных маршрута движения. Когда транспортное средство 100 отклоняется от прогнозируемого маршрута движения, секция 101 формирования данных маршрута движения формирует новые данные D101 маршрута движения, указывающие другой прогнозируемый маршрут движения, с тем чтобы обновлять данные D101 маршрута движения. Секция 101 формирования данных маршрута движения представляет собой секцию задания прогнозируемого маршрута движения для задания прогнозируемого маршрута движения для рассматриваемого транспортного средства.
Данные D101 маршрута движения, считываемые из секции 17 хранения данных маршрута движения посредством секции 101 формирования данных маршрута движения, вводятся в секцию 102 формирования данных изображений плана движения и секцию 103 составления плана движения.
В дополнение к данным D101 маршрута движения, данные D11 позиционирования, картографические данные D12 и данные D13 формирования изображений вводятся в секцию 102 формирования данных изображений плана движения. Ниже поясняется обработка, реализованная посредством секции 102 формирования данных изображений плана движения.
В дополнение к данным D101 маршрута движения, данные D11 позиционирования, картографические данные D12, данные D13 формирования изображений и данные D15 скорости вводятся в секцию 103 составления плана движения. Секция 103 составления плана движения включает в себя секцию 1031 составления плана скорости для составления плана, указывающего то, какая скорость выбирается для вождения транспортного средства 100, и секцию 1032 задания целевых точек движения для задания целевых точек (целевых точек движения), вдоль которых движется транспортное средство 100.
Как описано выше, картографические данные D12 включают в себя информацию D12E окружающих объектов дороги. Следовательно, секция 103 составления плана движения может указывать, какую точку транспортное средство 100 в данный момент проезжает на прогнозируемом маршруте движения, указываемом посредством данных D101 маршрута движения, посредством сравнения картографических данных D12 с данными D13 формирования изображений. Секция 103 составления плана движения может указывать местоположение на дороге, по которой движется транспортное средство 100, в отношении данных D11 позиционирования в дополнение к картографическим данным D12 и данным D13 формирования изображений.
Ниже поясняются операции секции 1031 составления плана скорости и секции 1032 задания целевых точек движения со ссылкой на фиг. 5. Предполагается, что транспортное средство 100 движется на участке дороги, указываемом посредством отрезка L1, поворачивает налево в узле N1 и дальше движется на участке дороги, указываемом посредством отрезка L2, как указано посредством стрелки согласно данным D101 маршрута движения. Секция 1032 задания целевых точек движения выделяет целевые точки P1, P2, P3,..., движения с предварительно определенными интервалами для дороги, по которой движется транспортное средство.
Секция 1032 задания целевых точек движения размещает соответствующие целевые точки движения с интервалами, причем каждый интервал имеет расстояние от позиции, в которой транспортное средство 100 расположено на дороге, до позиции, до которой транспортное средство 100 проезжает в течение предварительно определенного периода времени, или до позиции, до которой транспортное средство 100 проезжает предварительно определенное расстояние по дороге вперед в направлении движения. Фиг. 5 проиллюстрирован с примером, в котором секция 1032 задания целевых точек движения задает соответствующие целевые точки движения в пределах расстояния от текущей позиции транспортного средства 100 до целевой точки P7 движения.
Расстояние от текущей позиции транспортного средства 100 до самой удаленной целевой точки движения впереди транспортного средства 100 упоминается в качестве расстояния для составления плана движения. Секция 1032 задания целевых точек движения может определять расстояние для составления плана движения в зависимости от скорости транспортного средства 100. Альтернативно, секция 1032 задания целевых точек движения может увеличивать расстояние для составления плана движения по мере того, как возрастает скорость транспортного средства 100. По мере того, как возрастает расстояние для составления плана движения, изображения различения состояний движения, описанные ниже, имеют больший охват.
В частности, секция 1032 задания целевых точек движения разделяет скорость на множество диапазонов и уменьшает расстояние для составления плана движения в выделенной области с более низкой скоростью и увеличивает расстояние для составления плана движения в выделенной области с более высокой скоростью. Например, секция 1032 задания целевых точек движения может задавать расстояние для составления плана движения равным 50 м, когда скорость составляет 40 км/ч, и задавать расстояние для составления плана движения равным 80 м, когда скорость составляет 60 км/ч.
Секция 1032 задания целевых точек движения может варьировать интервал, с которым позиционируются соответствующие целевые точки движения, в зависимости от скорости. Секция 1032 задания целевых точек движения сужает интервал в областях, в которых скорость ниже, и расширяет интервал в областях, в которых скорость выше. Например, секция 1032 задания целевых точек движения может задавать интервал равным 1,5 м, когда скорость составляет 30 км/ч, и задавать интервал равным 4 м, когда скорость составляет 60 км/ч.
Секция 1032 задания целевых точек движения задает, в качестве соответствующих целевых точек движения, позиции по дороге, через которые, например, проходит центр транспортного средства 100 или средняя часть между передними колесами. Секция 103 составления плана движения может распознавать полосу движения, в которой движется транспортное средство 100, согласно данным D13 формирования изображений. Секция 1032 задания целевых точек движения может выделять целевые точки P1, P2, P3,..., движения для середины полосы движения.
Как описано выше, картографические данные D12 включают информацию D12s об ограничении скорости в соответствующие участки дороги. Следовательно, секция 1031 составления плана скорости может составлять план скорости, указывающий то, какая скорость для вождения транспортного средства 100 задается для соответствующих участков дороги отрезков L1 и L2.
На фиг. 5 проиллюстрирован пример, в котором ограничение скорости на отрезке L1 задается равным 40 км/ч, и ограничение скорости на отрезке L2 задается равным 30 км/ч. Секция 1031 составления плана скорости задает скорость в соответствующих целевых точках P1-P3 движения равной 40 км/ч, задает скорость в целевой точке P4 движения, например, равной 36 км/ч и задает скорость в целевой точке P5 движения, например, равной 32 км/ч на участке дороги отрезка L1.
Узел N1 расположен в позиции, отличающейся от целевых точек движения, заданных посредством секции 1032 задания целевых точек движения. Секция 1031 составления плана скорости также может выделять скорость для узла N1. Секция 1031 составления плана скорости задает скорость в узле N1 равной 30 км/ч. Секция 1031 составления плана скорости задает скорость в соответствующих целевых точках P6 и P7 движения на участке дороги отрезка L2 равной 30 км/ч.
Как описано выше, секция 103 составления плана движения определяет расстояние для составления плана движения по дороге впереди, по которой движется транспортное средство 100, и выделяет целевые точки движения для дороги с предварительно определенными интервалами в пределах расстояния для составления плана движения. Секция 103 составления плана движения составляет план движения, указывающий скорость для вождения транспортного средства 100, заданную для соответствующих целевых точек движения.
Секция 103 составления плана движения подает данные D103 плана движения, указывающие составляемый план движения, в секцию 21 приведения в действие устройства обеспечения движения и секцию 102 формирования данных изображений плана движения. Данные D103 плана движения включают в себя данные целевых точек движения и данные скорости для соответствующих целевых точек движения. Секция 103 составления плана движения может подавать только данные целевых точек движения в секцию 102 формирования данных изображений плана движения.
Секция 21 приведения в действие устройства обеспечения движения приводит в действие устройство 22 обеспечения движения на основе данных D103 плана движения. Транспортное средство 100 в силу этого автоматически движется по прогнозируемому маршруту движения, указываемому посредством данных D101 маршрута движения, согласно плану движения, составляемому посредством секции 103 составления плана движения.
Фиг. 6 является видом при просмотре из транспортного средства 100 и схематично показывает состояние, в котором транспортное средство 100 движется на участках дороги отрезков L1 и L2 согласно плану движения, указываемому посредством данных D103 плана движения. Целевые точки P1, P2, P3,..., движения выделены, например, для середины полосы движения. Транспортное средство 100 движется вдоль целевых точек P1, P2, P3, ..., движения последовательно со скоростью, выделенной для соответствующих целевых точек движения.
Фиг. 5 показывает состояние, в котором не присутствуют помехи, такие как едущие впереди транспортные средства, движущиеся впереди транспортного средства 100, так что транспортное средство 100 может продолжать двигаться со скоростью в пределах ограничения скорости для удобства пояснения. На практике, транспортное средство 100 должно останавливаться или замедляться на светофорах или вследствие присутствия помех.
Светофоры размещены около перекрестков, и их высоты являются приблизительно фиксированными. Следовательно, секция 103 составления плана движения может распознавать цвет светофора на основе данных D13 формирования изображений. Секция 1031 составления плана скорости варьирует скорость, выделенную для соответствующих целевых точек, в зависимости от цвета светофора, используемого в качестве условия, отличного от ограничения скорости.
Секция 103 составления плана движения служит в качестве секции определения информации дороги для определения информации дороги, по которой движется транспортное средство 100, по прогнозируемому маршруту движения. Информация дороги, в частности, представляет собой дорожные знаки, включающие в себя, например, знаки ограничения скорости и светофоры на дороге.
Секция 103 составления плана движения служит также в качестве секции задания прогнозируемого состояния движения для задания транспортного средства 100 в состояние приведения в движение (или состояние ускорения) или в состояние торможения (или состояние замедления), когда транспортное средство 100 движется по прогнозируемому маршруту движения, на основе информации дороги и скорости транспортного средства 100.
Как показано на фиг. 4, данные D13 формирования изображений и данные D14 системы определения дальности вводятся в секцию 104 определения помех. Секция 104 определения помех определяет помехи посредством использования, по меньшей мере, данных D13 формирования изображений либо данных D14 системы определения дальности. Секция 104 определения помех может определять помехи посредством использования как данных D13 формирования изображений, так и данных D14 системы определения дальности.
Здесь, помехи представляют собой объекты (включающие в себя людей), которые препятствуют безопасному вождению транспортного средства 100. Конкретные примеры помех включают в себя едущее впереди транспортное средство, человека или транспортное средство (к примеру, автомобиль или велосипед), вклинивающееся перед транспортным средством 100, и транспортное средство, паркуемое на улице.
Когда секция 104 определения помех определяет помеху, секция 104 определения помех подает в секцию 103 составления плана движения данные D104 определения помех, указывающие то, что определяется помеха. Данные D104 определения помех включают в себя данные расстояния для расстояния между транспортным средством 100 и помехой. Секция 1031 составления плана скорости варьирует скорость, выделенную для соответствующих целевых точек, в зависимости от присутствия или отсутствия помехи или расстояния между транспортным средством 100 и помехой, используемой в качестве условия, отличного от ограничения скорости и цвета светофора.
Секция 103 составления плана движения, служащая в качестве секции задания прогнозируемого состояния движения, задает транспортное средство 100 в состояние приведения в движение (или ускорения) или в состояние торможения (или замедления) в зависимости от результата присутствия или отсутствия помехи или расстояния между транспортным средством 100 и определенной помехой.
Секция 102 формирования данных изображений плана движения указывает позицию, в которой транспортное средство 100 движется по дороге, и распознает полосу движения идентично секции 103 составления плана движения. Секция 102 формирования данных изображений плана движения формирует, согласно данным целевых точек движения, включенным в данные D103 плана движения, данные изображений, полученные таким образом, чтобы накладывать прогнозируемую линию движения, сформированную на основе целевых точек движения, на изображение, снятое камерой, в данных D13 формирования изображений.
Фиг. 7 показывает первый пример прогнозируемой линии движения. Предполагается, что транспортное средство 100 движется вверх в полосе LN0 движения. Первый пример является прогнозируемой линией R1 движения, которая является прямой линией (или кривой линией), соединяющей целевые точки движения и имеющей предварительно определенную ширину Wr1. Прогнозируемая линия R1 движения первого примера является линией, через которую приблизительно проходит центр ширины W100 транспортного средства для транспортного средства 100.
Модуль формирования данных изображений плана движения 102 определяет ширину Wr1 прогнозируемой линии R1 движения следующим образом. Прямая линия R10, показанная на фиг. 8, является линией, соединяющей соответствующие целевые точки движения. Здесь, транспортное средство 100 не может двигаться по прямой линии R10 вследствие неровностей на поверхности дороги, даже когда секция 21 приведения в действие устройства обеспечения движения приводит в действие механизм 22s рулевого управления на основе данных D103 плана движения, чтобы выполнять вождение транспортного средства 100 по прямой. Транспортное средство 100 поперечно перемещается, как указано посредством кривой линии R20.
Когда прогнозируемая линия движения является узкой прямой линией R10, как показано на фиг. 8, водитель может испытывать некомфортное ощущение вследствие несоответствия прогнозируемой линии движения поперечному перемещению транспортного средства 100. Таким образом, с учетом такого поперечного перемещения транспортного средства 100, ширина Wr1 прогнозируемой линии R1 движения может задаваться равной ширине поперечного перемещения или больше.
Уровень поперечного перемещения транспортного средства 100 соответствует ошибке Dss управления, извлекаемой из отклонения механизма 22s рулевого управления, вызываемого при вождении таким образом, чтобы выполнять вождение транспортного средства 100 по прямой. Как показано на фиг. 4, ошибка Dss управления вводится в секцию 102 формирования данных изображений плана движения из секции 21 приведения в действие устройства обеспечения движения. Секция 102 формирования данных изображений плана движения определяет ширину Wr прогнозируемой линии R1 движения в зависимости от ошибки D22 управления механизма 22s рулевого управления.
Фиг. 9 показывает второй пример прогнозируемой линии движения. Второй пример включает в себя две прогнозируемых линии R2 движения, совмещенные параллельно с прямой линией, соединяющей соответствующие целевые точки движения. Секция 102 формирования данных изображений плана движения задает расстояние между двумя прогнозируемыми линиями R2 движения приблизительно равным ширине W100 транспортного средства для транспортного средства 100. Секция 102 формирования данных изображений плана движения может задавать расстояние между двумя прогнозируемыми линиями R2 движения равным ширине W110, превышающей ширину W100 транспортного средства, с учетом ошибки Dss управления.
Ширина W110 может быть шириной между левой прогнозируемой линией R2 движения, заданной за пределами поперечного перемещения влево от транспортного средства 100, и правой прогнозируемой линией R2 движения, заданной за пределами поперечного перемещения вправо от транспортного средства 100. Расстояние между двумя прогнозируемыми линиями R2 движения, заданное как ширина W110, не допускает выезд транспортного средства 100 за пределы прогнозируемых линий R2 движения, даже когда транспортное средство 100 поперечно перемещается. Это способствует недопущению некомфортного ощущения водителя.
Как описано ниже, одна прогнозируемая линия R1 движения или область, заданная посредством двух прогнозируемых линий R2 движения, является частью, на которую наложены изображения различения, указывающие состояние движения транспортного средства (изображения различения состояний движения). Секция 102 формирования данных изображений плана движения задает наложенную часть в диапазоне от минимальной ширины, соответствующей ширине ошибки управления механизма 22s рулевого управления транспортного средства 100, до максимальной ширины, полученной таким образом, чтобы суммировать ширину ошибки управления с шириной W100 транспортного средства для транспортного средства 100.
Секция 102 формирования данных изображений плана движения формирует данные D102 изображений плана движения, полученные таким образом, чтобы накладывать прогнозируемую линию R1 движения или прогнозируемые линии R2 движения на изображение, снятое камерой, и дополнительно накладывать изображения различения состояний движения, указывающие состояние движения транспортного средства 100, на него. Состояние движения транспортного средства 100, в частности, представляет собой состояние приведения в движение (или ускорения) или состояние торможения (или замедления).
Состояние движения транспортного средства 100 может включать в себя состояние движения накатом по инерции, в котором движущая сила или тормозная сила не прикладывается. Альтернативно, состояние движения накатом по инерции может включать в себя состояние, в котором транспортное средство 100 ускоряется, и состояние, в котором транспортное средство 100 замедляется.
Фиг. 10 и 11 показывают первый пример изображений различения состояний движения, отображаемых на мониторе 18 и наложенных на изображение, снятое камерой. Фиг. 10 и 11 показывают картер использования двух прогнозируемых линий R2 движения, поясненных со ссылкой на фиг. 9.
На фиг. 10, секция 104 определения помех определяет, в качестве помехи, едущее впереди транспортное средство 150, расположенное впереди транспортного средства 100 (рассматриваемое транспортное средство), движущееся в полосе LN0 движения, и подает данные D104 определения помех в секцию 103 составления плана движения. Секция 103 составления плана движения, в которую поданы данные D104 определения помех, выделяет скорость для соответствующих целевых точек движения таким образом, чтобы постепенно замедлять транспортное средство 100.
Как показано на фиг. 10, секция 102 формирования данных изображений плана движения накладывает изображение Im10 различения состояний движения (первое изображение различения) на область между двумя прогнозируемыми линиями R2 движения, в которых транспортное средство 100 движется с постоянной скоростью в состоянии приведения в движение. Секция 102 формирования данных изображений плана движения дополнительно накладывает изображение Im11 различения состояний движения (второе изображение различения) на область между двумя прогнозируемыми линиями R2 движения, в которых транспортное средство 100 замедляется в состоянии торможения.
Секция 102 формирования данных изображений плана движения формирует, например, данные D102 изображений плана движения, в которых изображение Im10 различения состояний движения и изображение Im11 различения состояний движения отличаются по цвету друг от друга. Изображение Im10 различения состояний движения и изображение Im11 различения состояний движения могут представлять собой полупрозрачные изображения. Когда изображение Im10 различения состояний движения и изображение Im11 различения состояний движения представляют собой полупрозрачные изображения, не допускается полное блокирование дороги (изображения полосы движения), так что могут распознаваться дорожные знаки или объекты по дороге.
Водитель видит изображение плана движения в данных D102 изображений плана движения, отображаемых на мониторе 18, с тем чтобы легко распознавать, что транспортное средство 100 управляется с переключением из состояния движения на постоянной скорости в состояние замедления.
Фиг. 11 показывает состояние, в котором транспортное средство 100 останавливается перед перекрестком, поскольку светофор TL1 имеет красный цвет, но начинает движение с момента, когда светофор TL1 переключается на зеленый цвет. Секция 103 составления плана движения задает соответствующие целевые точки движения для скорости таким образом, чтобы постепенно ускорять транспортное средство 100 после начала движения до проезда предварительно определенного расстояния. После того, как транспортное средство 100 достигает ограничения скорости, секция 103 составления плана движения задает соответствующие целевые точки движения, чтобы выполнять вождение транспортного средства 100 с постоянной скоростью.
Как показано на фиг. 11, секция 102 формирования данных изображений плана движения накладывает изображение Im12 различения состояний движения (третье изображение различения) на область между двумя прогнозируемыми линиями R2 движения, в которых транспортное средство 100 ускоряется в состоянии приведения в движение. Секция 102 формирования данных изображений плана движения дополнительно накладывает изображение Im10 различения состояний движения на область между двумя прогнозируемыми линиями R2 движения, в которых транспортное средство 100 движется с постоянной скоростью в состоянии приведения в движение, как и в случае фиг. 10.
На фиг. 11, секция 102 формирования данных изображений плана движения также формирует данные D102 изображений плана движения, в которых изображение Im10 различения состояний движения и изображение Im12 различения состояний движения отличаются по цвету друг от друга. Изображение Im12 различения состояний движения также может представлять собой полупрозрачное изображение по идентичной причине.
Водитель видит изображение плана движения, указываемое посредством данных D102 изображений плана движения, отображаемых на мониторе 18, чтобы легко распознавать, что транспортное средство 100 управляется с переключением из состояния ускорения в состояние движения на постоянной скорости.
На фиг. 10 и 11, секция 102 формирования данных изображений плана движения может изменять цвет прогнозируемых линий R2 движения таким образом, что он отличается от соответствующих изображений Im10, Im11 и Im12 различения состояний движения, или выбирать цвет прогнозируемых линий R2 движения таким образом, что он соответствует соответствующим изображениям Im10, Im11 и Im12 различения состояний движения. Когда прогнозируемые линии R2 движения раскрашиваются идентично изображениям Im10, Im11 и Im12 различения состояний движения, изображение плана движения, полученное таким способом, является практически идентичным изображению, включающему в себя только изображения Im10, Im11 и Im12 различения состояний движения.
Изображения различения состояний движения не ограничены изображениями различения состояний движения, имеющими различные цвета, как показано на фиг. 10 и 11. Вместо этого могут использоваться различные изображения различения, варьирующиеся по форме в зависимости от состояния движения.
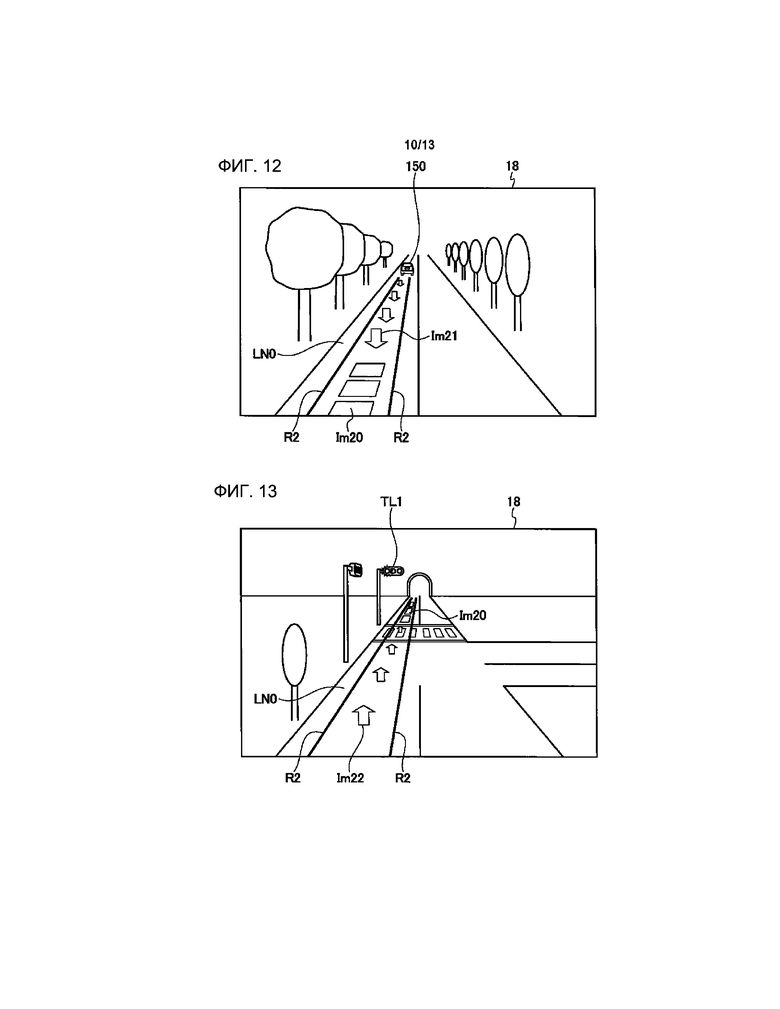
Фиг. 12 и 13 показывают второй пример изображений различения состояний движения, отображаемых на мониторе 18 и наложенных на изображение, снятое камерой.
Фиг. 12 показывает пример изображений различения, варьирующихся по форме в зависимости от состояния движения, вместо изображения Im10 различения состояний движения и изображения Im11 различения состояний движения, показанных на фиг. 10. Как показано на фиг. 12, секция 102 формирования данных изображений плана движения накладывает изображения Im20 различения состояний движения (первые изображения различения), имеющие, например, квадратную форму, на область, в которой транспортное средство 100 движется с постоянной скоростью в состоянии приведения в движение.
Секция 102 формирования данных изображений плана движения также накладывает изображения Im21 различения состояний движения (вторые изображения различения), имеющие, например, форму направленной вниз стрелки, на область, в которой транспортное средство 100 замедляется в состоянии торможения.
Фиг. 13 показывает пример изображений различения, варьирующихся по форме в зависимости от состояния движения, вместо изображения Im10 различения состояний движения и изображения Im12 различения состояний движения, показанных на фиг. 11. Как показано на фиг. 13, секция 102 формирования данных изображений плана движения накладывает изображения Im22 различения состояний движения (третьи изображения различения), имеющие, например, форму направленной вверх стрелки, на область, в которой транспортное средство 100 ускоряется в состоянии приведения в движение.
Секция 102 формирования данных изображений плана движения также накладывает изображения Im20 различения состояний движения, имеющие квадратную форму, на область, в которой транспортное средство 100 движется с постоянной скоростью в состоянии приведения в движение, как и в случае фиг. 12.
Квадратная форма, форма направленной вниз стрелки и форма направленной вверх стрелки изображений Im20, Im21 и Im22 различения состояний движения являются просто примерами и могут представлять собой любую форму при условии, что, она позволяет предоставлять водителю изображения постоянной скорости, замедления и ускорения. Оконтуренные изображения Im20, Im21 и Im22 различения состояний движения со свободным местом внутри фактически не оказывают влияние на распознавание дорожных знаков или объектов по дороге.
Здесь, когда прогнозируемая линия R1 движения, как пояснено на фиг. 7, используется вместо этого, прогнозируемая линия R1 движения может быть разделена на части с различными цветами, аналогично изображениям Im10, Im11 и Im12 различения состояний движения. Альтернативно, изображения различения, аналогичные изображениям Im10, Im11 и Im12 различения состояний движения, могут быть наложены на прогнозируемую линию R1 движения.
Фиг. 10-13 проиллюстрированы с примером, в котором изображение плана движения указывается с тремя различными видами секций, показывающих либо состояние приведения в движение, либо состояние торможения, варьирующееся в зависимости от ускорения транспортного средства 100.
Например, когда транспортное средство 100 движется по дороге с увеличивающимся градиентом, транспортное средство 100 может находиться в состоянии приведения в движение, в котором акселератор 22a нажат, так что оно движется с постоянной скоростью. Когда транспортное средство 100 движется по дороге с уменьшающимся градиентом, транспортное средство 100 может находиться в состоянии торможения, в котором акселератор 22a отпущен, так что оно движется с постоянной скоростью. Секция 102 формирования данных изображений плана движения может использовать изображение плана движения, указываемое с различными изображениями различения состояний движения, указывающими то, в каком состоянии 100 находится транспортное средство: в состоянии приведения в движение или в состоянии торможения, независимо от ускорения транспортного средства 100.
Секция 103 составления плана движения также может составлять план движения, указывающий прогнозируемое состояние движения из состояния приведения в движение и состояния торможения в зависимости от информации дороги, по которой движется транспортное средство 100, такой как градиент или кривизна. В таком случае, секция 102 формирования данных изображений плана движения накладывает, на изображение, снятое камерой, изображения различения состояний движения, заданные в зависимости от градиента или кривизны дороги.
Поскольку изображения различения состояний движения варьируются в зависимости от дорожных условий, водитель может распознавать прогнозируемое состояние движения в пределах расстояния, для которого план движения сформулирован, от текущей позиции транспортного средства 100 при распознавании дорожных условий.
Дополнительно, секция 102 формирования данных изображений плана движения может указывать состояние движения из либо состояния ускорения транспортного средства 100, либо состояния замедления транспортного средства 100 независимо от того, находится транспортное средство 100 в состоянии приведения в движение или в состоянии торможения.
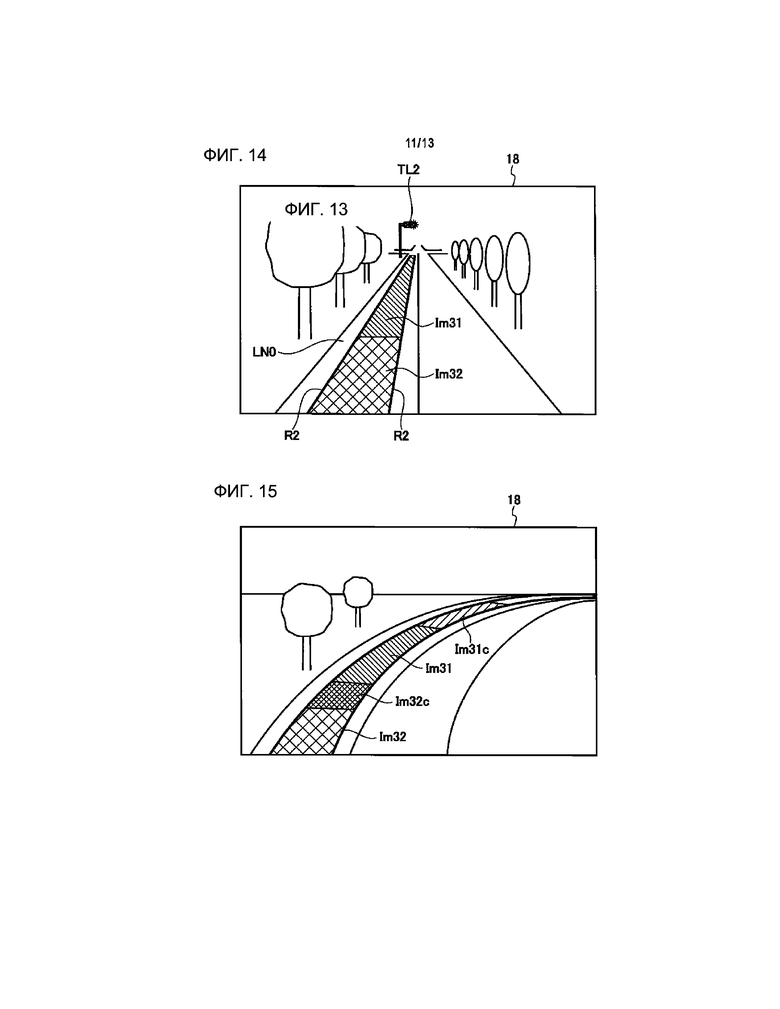
Фиг. 14 показывает третий пример изображений различения состояний движения, указывающих только состояние ускорения и состояние замедления независимо от того, находится транспортное средство 100 в состоянии приведения в движение или в состоянии торможения. На фиг. 14, светофор TL2 впереди имеет красный цвет. Как показано на фиг. 14, секция 102 формирования данных изображений плана движения накладывает изображение Im32 различения состояний движения на область, в которой транспортное средство 100 ускоряется, и накладывает изображение Im31 различения состояний движения на область, в которой транспортное средство 100 замедляется.
Фиг. 15 показывает четвертый пример изображений различения состояний движения. Здесь, транспортное средство 100 может находиться в состоянии движения накатом по инерции для состояния ускорения в зависимости от дорожных условий, в то время как транспортное средство 100 не находится ни в состоянии приведения в движение, ни в состоянии торможения. Транспортное средство 100 также может находиться в состоянии движения накатом по инерции для состояния замедления в зависимости от дорожных условий, в то время как транспортное средство 100 не находится ни в состоянии приведения в движение, ни в состоянии торможения. Фиг. 15 является примером, указывающим изображения различения состояний движения, отсортированные согласно состоянию движения накатом по инерции, которое является частью состояния ускорения, и состоянию движения накатом по инерции, которое является частью состояния замедления.
Как показано на фиг. 15, секция 102 формирования данных изображений плана движения накладывает изображение Im32 различения состояний движения на область, в которой транспортное средство 100 ускоряется, и накладывает изображение Im32c различения состояний движения на область, в которой транспортное средство 100 находится в состоянии движения накатом по инерции для состояния ускорения. Дополнительно, секция 102 формирования данных изображений плана движения накладывает изображение Im31 различения состояний движения на область, в которой транспортное средство 100 замедляется, и накладывает изображение различения состояний движения Im31c на область, в которой транспортное средство 100 находится в состоянии движения накатом по инерции для состояния замедления.
Изображения различения состояний движения согласно устройству и способу для управления движением транспортного средства обобщаются следующим образом. Изображения распознавания состояний движения представляют изображение маршрута, соответствующее прогнозируемому маршруту движения, заданному для рассматриваемого транспортного средства. В качестве первого аспекта, изображение маршрута может отображаться в режиме отображения, соответствующем каждому из состояния приведения в движение (движущей силы) и состояния торможения (тормозной силы). Фиг. 10 и 11 указывают изображение маршрута таким образом, чтобы варьировать состояние приведения в движение в зависимости от состояния ускорения и состояния движения на постоянной скорости. Первый аспект предоставляет изображение маршрута, отображаемое в режимах, соответствующих состоянию приведения в движение и состоянию торможения без различения состояния ускорения и состояния приведения в движение на постоянной скорости.
Фиг. 10-13 показывают второй аспект изображения маршрута, отображаемого в режиме отображения, соответствующем каждому из состояния приведения в движение и состояния торможения, и указывает изображение маршрута таким образом, чтобы варьировать состояние приведения в движение в зависимости от состояния ускорения и состояния движения на постоянной скорости.
В качестве третьего аспекта, как пояснено со ссылкой на фиг. 14, изображение маршрута может отображаться в режиме отображения, соответствующем каждому из состояния ускорения (ускорению) и состояния замедления (замедлению). В качестве четвертого аспекта, как пояснено со ссылкой на фиг. 15, изображение маршрута может отображаться в режиме отображения, соответствующем каждому из состояния ускорения, состояния замедления и состояния движения накатом по инерции. На фиг. 15, только состояние движения накатом по инерции для состояния замедления может отображаться без отображения состояния движения накатом по инерции состояния ускорения.
В качестве других аспектов, изображение маршрута может отображаться в режимах отображения в зависимости от уровня движущей силы и тормозной силы или может отображаться в режимах отображения в зависимости от уровня ускорения и замедления.
Далее подробнее поясняются работа устройства помощи при вождении транспортного средства согласно варианту осуществления и процесс способа помощи при вождении транспортного средства согласно варианту осуществления, описанному выше, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 16. Как показано на фиг. 16, контроллер 10 получает данные D101 маршрута движения из секции 17 хранения данных маршрута движения на этапе S1.
На этапе S2 контроллер 10 выделяет целевые точки движения с предварительно определенными интервалами для полосы движения, по которой движется рассматриваемое транспортное средство, от текущей позиции рассматриваемого транспортного средства (транспортного средства 100) до позиции, в которой рассматриваемое транспортное средство проезжает расстояние для составления плана движения согласно прогнозируемому маршруту движения, указываемому посредством данных D101 маршрута движения. На этапе S3, контроллер 10 выделяет скорость для соответствующих целевых точек движения, чтобы составлять план скорости в зависимости от текущей скорости рассматриваемого транспортного средства, ограничения скорости на проезжаемой дороге, цвета светофора, присутствия или отсутствия помехи и расстояния до нее.
На этапе S2 и этапе S3 формируются данные D103 плана движения, указывающие прогнозируемое состояние движения как либо состояние приведения в движение, либо состояние торможения, в которое задается транспортное средство 100.
На этапе S4, контроллер 10 подает данные D103 плана движения в секцию 21 приведения в действие устройства обеспечения движения. На этапе S5, контроллер 10 накладывает прогнозируемую линию движения или прогнозируемые линии движения на изображение полосы движения в изображении, снятом камерой. На этапе S6, контроллер 10 накладывает изображения различения состояний движения на прогнозируемую линию движения или между прогнозируемыми линиями движения. Через этап S5 и этап S6, формируются данные D102 изображений плана движения, указывающие изображение плана движения.
На этапе S7, контроллер 10 подает данные D102 изображений плана движения на монитор 18. Монитор 18 в силу этого отображает изображение, снятое камерой, на которое наложено изображение плана движения. Контроллер 10 возвращает процесс на этап S1 после окончания этапа S7 и повторяет процесс от этапа S1 до этапа S7.
Вышеописанный процесс иллюстрирует случай, в котором используется камера 13, и изображение плана движения наложено на изображение полосы движения в изображении, снятом камерой. Лазерный дальномер может использоваться вместо камеры 13. Лазерный дальномер испускает лазерное излучение, и контроллер 10 за счет этого обнаруживает отраженные волны, отражаемые от дороги, чтобы получать данные изображений, указывающие полосу движения дороги.
Когда лазерный дальномер используется вместо камеры 13, данные изображений, указывающие полосу движения дороги, выводимые из лазерного дальномера, вводятся в секцию 102 формирования данных изображений плана движения вместо данных D13 формирования изображений. Секция 102 формирования данных изображений плана движения может накладывать изображение плана движения на изображение полосы движения, указываемое посредством данных изображений, указывающих полосу движения дороги.
В случае пятого примера, показанного на фиг. 17, изображение плана движения не накладывается на изображение, снятое камерой, формирующее изображение фактической дороги, по которой движется транспортное средство 100, но может быть наложено на картографическое изображение, включенное в картографические данные D12. Картографическое изображение указывает изображение маршрута, соответствующее прогнозируемому маршруту движения рассматриваемого транспортного средства. Фиг. 17 является видом, показывающим дороги вокруг текущей позиции транспортного средства 100, указываемой на мониторе 18 на основе картографических данных D12. Метка M100 текущей позиции указывает текущую позицию транспортного средства 100.
Пример отображения, показанный на фиг. 17, указывает направление движения транспортного средства 100 вверх. Здесь, светофор TL3 впереди транспортного средства 100 предположительно имеет красный цвет. Секция 103 составления плана движения составляет план движения таким образом, чтобы постепенно замедлять транспортное средство 100 с постоянной скорости, с тем чтобы останавливать транспортное средство перед светофором TL3.
Как показано на фиг. 17, секция 102 формирования данных изображений плана движения накладывает, на изображение полосы движения в картографическом изображении, изображение Im10 различения состояний движения, указывающее то, что транспортное средство 100 движется с постоянной скоростью в состоянии приведения в движение, и изображение Im11 различения состояний движения, указывающее то, что транспортное средство 100 замедляется в состоянии торможения.
Пример отображения, показанный на фиг. 17, указывает то, что изображения Im10 и Im11 различения состояний движения наложены на полное изображение полосы движения при опускании прогнозируемой линии R1 движения или прогнозируемых линий R2 движения. Пример отображения, показанный на фиг. 17, может реализовываться таким образом, чтобы опускать этап S5, показанный на фиг. 16, и накладывать изображения различения состояний движения на изображение полосы движения в картографическом изображении на этапе S6.
Прогнозируемая линия R1 движения или прогнозируемые линии R2 движения могут быть наложены на изображение полосы движения, и изображения Im10 и Im11 различения состояний движения дополнительно могут быть наложены на них. Хотя изображение, полученное таким способом, указывает только состояния постоянной скорости и замедления, изображение Im12 различения состояний движения может быть наложено при указании состояния ускорения.
Как показано на фиг. 17, когда изображения Im10, Im11 и Im12 различения состояний движения наложены на картографическое изображение, изображения Im10, Im11 и Im12 различения состояний движения не обязательно должны быть полупрозрачными. Вместо изображений Im10, Im11 и Im12 различения состояний движения также могут использоваться изображения различения, варьирующиеся по форме в зависимости от состояния движения, к примеру, изображения Im20, Im21 и Im22 различения состояний движения.
Хотя фиг. 17 представляет собой двумерное картографическое изображение, она может представлять собой трехмерное картографическое изображение. Трехмерное картографическое изображение может аппроксимироваться как изображение, снятое камерой.
Устройство управления движением транспортного средства согласно варианту осуществления, как проиллюстрировано выше, включает в себя секцию 103 составления плана движения, секцию 102 формирования данных изображений плана движения и монитор 18.
Секция 103 составления плана движения задает, в качестве расстояния для составления плана движения, предварительно определенное расстояние впереди текущей позиции транспортного средства 100, движущегося по дороге по прогнозируемому маршруту движения. Секция 103 составления плана движения составляет план движения, указывающий то, в каком прогнозируемом состоянии движения находится транспортное средство 100: в состоянии приведения в движение или в состоянии торможения, когда транспортное средство 100 проезжает расстояние для составления плана движения.
Секция 102 формирования данных изображений плана движения формирует данные D102 изображений плана движения, в которых изображения различения состояний движения (к примеру, Im10, Im11 и Im12 или Im20, Im21 и Im22), визуально варьирующиеся в зависимости от состояния приведения в движение и состояния торможения, указываемого посредством плана движения, позиционируются в изображении полосы движения дороги, по которой движется транспортное средство. Монитор 18 отображает изображение плана движения, указываемое посредством данных D102 изображений плана движения.
Устройство управления движением транспортного средства согласно варианту осуществления имеет следующую конфигурацию. Секция 103 составления плана движения, служащая в качестве секции определения информации дороги, определяет информацию дороги, по которой движется рассматриваемое транспортное средство (транспортное средство 100) по прогнозируемому маршруту движения. Датчик 15 скорости, служащий в качестве секции определения скорости, определяет скорость рассматриваемого транспортного средства.
Секция 103 составления плана движения, служащая в качестве секции задания прогнозируемого состояния движения, задает рассматриваемое транспортное средство либо в состояние приведения в движение, либо в состояние торможения, когда рассматриваемое транспортное средство движется по прогнозируемому маршруту движения, на основе информации дороги, определенной посредством секции определения информации дороги, и скорости, определенной посредством датчика 15 скорости.
Секция 102 формирования данных изображений плана движения формирует данные изображений (данные изображений плана движения) для изображения, в которых изображения различения состояний движения, указывающие состояние приведения в движение и состояние торможения, заданные посредством секции задания прогнозируемого состояния движения, позиционируются на дороге, указывающей прогнозируемый маршрут движения. Монитор 18, служащий в качестве модуля отображения, отображает изображение данных изображений.
Здесь, позиционирование изображений различения состояний движения на дороге может представлять любое из наложения изображений различения состояний движения на изображение полосы движения, указывающее дорогу, замены части изображения полосы движения на изображения различения состояний движения и замены всего изображения полосы движения на изображения различения состояний движения.
Способ помощи при вождении транспортного средства согласно варианту осуществления включает в себя следующие этапы. Этап определения информации дороги определяет информацию дороги, по которой движется рассматриваемое транспортное средство по прогнозируемому маршруту движения. Этап определения скорости определяет скорость рассматриваемого транспортного средства. Этап задания задает рассматриваемое транспортное средство либо в состояние приведения в движение, либо в состояние торможения, когда рассматриваемое транспортное средство движется по прогнозируемому маршруту движения, на основе информации дороги, определенной на этапе определения информации дороги, и скорости, определенной на этапе определения скорости.
Этап формирования данных изображений формирует данные изображений изображения, в которых изображения различения состояний движения, указывающие состояние приведения в движение и состояние торможения, заданные на этапе задания, позиционируются на дороге, указывающей прогнозируемый маршрут движения. Этап отображения отображает изображение данных изображений на модуле отображения.
Согласно вышеописанной конфигурации, устройство управления движением и способ управления движением транспортного средства согласно варианту осуществления позволяют предоставлять инструкции, чтобы информировать водителя в отношении того, в какое прогнозируемое состояние движения должно задаваться рассматриваемое транспортное средство: в состояние приведения в движение или в состояние торможения.
В устройстве и способе для управления движением транспортного средства согласно варианту осуществления, секция формирования данных изображений визуально отличает изображение различения состояний движения, указывающее состояние приведения в движение, от изображения различения состояний движения, указывающего состояние торможения, так что водитель может легко отличать состояние приведения в движение от состояния торможения.
В устройстве и способе для управления движением транспортного средства согласно варианту осуществления, секция 102 формирования данных изображений плана движения может формировать данные изображений следующим образом.
Секция 102 формирования данных изображений плана движения формирует данные изображений плана движения из изображения различения состояний движения, в котором первое изображение различения позиционируется в области на дороге, в которой транспортное средство 100 движется с постоянной скоростью. Секция 102 формирования данных изображений плана движения также формирует данные изображений плана движения из изображений различения состояний движения, в которых второе изображение различения позиционируется в области на дороге, в которой транспортное средство 100 замедляется, и третье изображение различения позиционируется в области на дороге, в которой транспортное средство 100 ускоряется.
Соответственно, устройство управления движением транспортного средства может предоставлять не только инструкции для того, чтобы просто информировать в отношении состояния приведения в движение и состояния торможения, но также и инструкции для того, чтобы информировать в отношении состояния ускорения транспортного средства 100.
Секция 103 составления плана транспортного средства может включать в себя как секцию 1032 задания целевых точек движения, так и секцию 1031 составления плана скорости. Секция 1032 задания целевых точек движения выделяет множество целевых точек движения с предварительно определенными интервалами для дороги в пределах расстояния для составления плана движения, по которой движется транспортное средство 100. Секция 1031 составления плана скорости выделяет скорость транспортного средства 100 для соответствующих целевых точек движения и составляет план скорости во время проезда транспортным средством 100 расстояния для составления плана движения.
Соответственно, вождение транспортного средства 100 может выполняться автономно.
Секция 102 формирования данных изображений плана движения может использовать, в качестве изображений различения состояний движения, изображения различения, варьирующиеся по цвету или форме в зависимости от состояния приведения в движение и состояния торможения. Соответственно, водитель может легко распознавать состояние приведения в движение и состояние торможения.
Секция 102 формирования данных изображений плана движения может использовать полупрозрачные изображения различения в качестве изображений различения состояний движения. Соответственно, не допускается полное блокирование изображения полосы движения, так что могут распознаваться дорожные знаки или объекты по дороге.
Секция 102 формирования данных изображений плана движения может задавать ширину соответствующих изображений различения состояний движения в диапазоне от минимальной ширины, соответствующей ширине поперечного перемещения транспортного средства 100 вследствие ошибки управления механизма 22s рулевого управления транспортного средства 100, до максимальной ширины, полученной таким образом, чтобы суммировать ширину поперечного перемещения транспортного средства 100 вследствие ошибки управления с шириной транспортного средства 100. Соответственно, можно не допускать некомфортного ощущения водителя при наблюдении изображений различения состояний движения.
Секция 103 составления плана движения может увеличивать расстояние для составления плана движения по мере того, как возрастает скорость транспортного средства 100. Секция 102 формирования данных изображений плана движения может увеличивать охват соответствующих изображений различения состояний движения в направлении движения рассматриваемого транспортного средства по мере того, как возрастает скорость транспортного средства 100. Соответственно, водитель может легко распознавать прогнозируемое состояние движения транспортного средства 100, даже когда скорость увеличивается.
Секция 102 формирования данных изображений плана движения может варьировать изображения различения состояний движения в зависимости от градиента или кривизны дороги, по которой движется транспортное средство 100. Соответственно, водитель также может распознавать дорожные условия.
Устройство управления движением транспортного средства согласно варианту осуществления дополнительно может включать в себя секцию 104 определения помех для определения помехи, расположенной впереди транспортного средства 100. Секция 103 составления плана движения может составлять план движения в зависимости от результата присутствия или отсутствия помехи, определенного посредством секции 104 определения помех, или расстояния от транспортного средства 100 до помехи, определенного таким образом, чтобы задавать рассматриваемое транспортное средство либо в состояние приведения в движение, либо в состояние торможения.
Поскольку рассматриваемое транспортное средство может задаваться в состояние приведения в движение или состояние торможения, в то время как план движения составляется с учетом присутствия или отсутствия помехи, изображения различения состояний движения могут отображаться согласно плану движения, составляемому в зависимости от фактических дорожных условий, в которых может присутствовать помеха. Соответственно, водителю могут предоставляться точные изображения различения состояний движения, соответствующие фактическим дорожным условиям.
Фиг. 4 показывает конфигурацию, в которой секция 101 формирования данных маршрута движения формирует данные D101 маршрута движения, и секция 17 хранения данных маршрута движения сохраняет сформированные данные D101 маршрута движения. Когда прогнозируемый маршрут движения, по которому движется транспортное средство 100, является фиксированным, секция 101 формирования данных маршрута движения не обязательно предоставляется в устройстве и способе для управления движением транспортного средства при условии, что предоставляется секция 17 хранения данных маршрута движения для сохранения предварительно определенных данных D101 маршрута движения.
Секция 103 составления плана движения составляет план скорости транспортного средства 100 на основе информации D12s об ограничении скорости, включенной в картографические данные D12. Способ получения для получения информации об ограничении скорости не ограничен способом получения из картографических данных D12.
Например, передающие устройства могут быть установлены рядом с дорогами, по которым движется транспортное средство 100, чтобы передавать информацию об ограничении скорости каждой дороги посредством радиосвязи, так что приемное устройство, смонтированное на транспортном средстве 100, может принимать информацию об ограничении скорости.
Транспортное средство 100 может представлять собой либо автономное транспортное средство, либо стандартное транспортное средство, которым управляет водитель.
Как описано выше, устройство управления движением и способ управления движением транспортного средства согласно варианту осуществления позволяют отображать изображение маршрута, соответствующее прогнозируемому маршруту движения рассматриваемого транспортного средства, на мониторе 18 в режиме отображения, соответствующем, по меньшей мере, либо состоянию приведения в движение (движущей силе), либо состоянию торможения (тормозной силе) рассматриваемого транспортного средства. Устройство управления движением и способ управления движением транспортного средства согласно варианту осуществления позволяют отображать изображение маршрута, соответствующее прогнозируемому маршруту движения рассматриваемого транспортного средства, на мониторе 18 в режиме отображения, соответствующем, по меньшей мере, либо состоянию ускорения (ускорению), либо состоянию замедления (замедлению) рассматриваемого транспортного средства.
Устройство управления движением и способ управления движением транспортного средства согласно настоящему изобретению не ограничены устройством и способом для управления движением транспортного средства согласно варианту осуществления, описанному выше, и различные модификации и улучшения могут вноситься без отступления от объема настоящего изобретения.
Промышленная применимость
Настоящее изобретение может применяться к устройству управления движением транспортного средства для предоставления инструкций, чтобы информировать водителя в транспортном средстве в отношении того, в каком состоянии движения транспортное средство движется по прогнозируемому маршруту движения: либо в состоянии движения из состояния приведения в движение или ускорения, либо в состоянии движения из состояния торможения или замедления.
Перечень ссылочных позиций
18 – монитор (модуль отображения)
101 – секция формирования данных маршрута движения (секция задания прогнозируемого маршрута движения)







Изобретение относится к области навигационного приборостроения и может найти применение в системах управления движением транспортных средств. Технический результат – расширение функциональных возможностей. Для этого секция (101) формирования данных маршрута движения служит в качестве секции задания прогнозируемого маршрута движения и выполнена с возможностью задавать прогнозируемый маршрут движения для рассматриваемого транспортного средства. Монитор (18) служит в качестве модуля отображения и выполнен с возможностью отображать изображение маршрута, соответствующее прогнозируемому маршруту движения, заданному для рассматриваемого транспортного средства. Изображение маршрута отображается на мониторе (18) в режиме отображения, соответствующем движущей силе и/или тормозной силе рассматриваемого транспортного средства. 4 н. и 9 з.п. ф-лы, 17 ил.
1. Устройство управления движением транспортного средства, содержащее:
секцию задания прогнозируемого маршрута движения, выполненную с возможностью задания прогнозируемого маршрута движения для рассматриваемого транспортного средства;
секцию задания прогнозируемого состояния движения, выполненную с возможностью составления плана движения, указывающего то, как выполнять вождение рассматриваемого транспортного средства по прогнозируемому маршруту движения, и задания либо состояния приведения в движение, либо состояния торможения рассматриваемого транспортного средства, движущегося по прогнозируемому маршруту движения, для дороги впереди рассматриваемого транспортного средства, на основе плана движения;
секцию формирования изображений плана движения, выполненную с возможностью формирования изображения плана движения, в котором изображения различения состояний движения, указывающие состояние приведения в движение и состояние торможения, заданные посредством секции задания прогнозируемого состояния движения, позиционируются в изображении маршрута, соответствующем прогнозируемому маршруту движения; и
модуль отображения, выполненный с возможностью отображения изображения плана движения.
2. Устройство управления движением транспортного средства, содержащее:
секцию задания прогнозируемого маршрута движения, выполненную с возможностью задания прогнозируемого маршрута движения для рассматриваемого транспортного средства;
секцию задания прогнозируемого состояния движения, выполненную с возможностью составления плана движения, указывающего то, как выполнять вождение рассматриваемого транспортного средства по прогнозируемому маршруту движения, и задания либо состояния ускорения, либо состояния замедления рассматриваемого транспортного средства, движущегося по прогнозируемому маршруту движения, для дороги впереди рассматриваемого транспортного средства, на основе плана движения;
секцию формирования изображений плана движения, выполненную с возможностью формирования изображения плана движения, в котором изображения различения состояний движения, указывающие состояние ускорения и состояние замедления, заданные посредством секции задания прогнозируемого состояния движения, позиционируются в изображении маршрута, соответствующем прогнозируемому маршруту движения; и
модуль отображения, выполненный с возможностью отображения изображения плана движения.
3. Устройство управления движением транспортного средства по п. 2, в котором:
секция задания прогнозируемого состояния движения задает рассматриваемое транспортное средство в состояние ускорения, в состояние замедления или в состояние движения накатом по инерции; и
секция формирования изображений плана движения формирует изображение плана движения, в котором изображения различения состояний движения, указывающие состояние ускорения, состояние замедления и состояние движения накатом по инерции, заданное посредством секции задания прогнозируемого состояния движения, позиционируются в изображении маршрута, соответствующем прогнозируемому маршруту движения.
4. Устройство управления движением транспортного средства по любому из пп. 1-3, в котором секция задания прогнозируемого состояния движения составляет план движения на основе информации относительно дороги, по которой движется рассматриваемое транспортное средство, включающей в себя ограничение скорости дороги и состояние светофора, и на основе скорости рассматриваемого транспортного средства.
5. Устройство управления движением транспортного средства по любому из пп. 1-3, дополнительно содержащее секцию определения помех, выполненную с возможностью определения помехи, расположенной впереди рассматриваемого транспортного средства,
при этом секция задания прогнозируемого состояния движения составляет план движения в зависимости от результата присутствия или отсутствия помехи, определяемой посредством секции определения помех, или расстояния между рассматриваемым транспортным средством и помехой.
6. Устройство управления движением транспортного средства по п. 4, в котором секция задания прогнозируемого состояния движения определяет состояние светофора на основе данных формирования изображений, полученных посредством камеры для формирования изображений наружной обстановки спереди от рассматриваемого транспортного средства.
7. Устройство управления движением транспортного средства по п. 5, в котором секция определения помех определяет помеху на основе, по меньшей мере, данных формирования изображений, полученных посредством камеры для формирования изображений наружной обстановки спереди от рассматриваемого транспортного средства, и данных системы определения дальности, полученных посредством датчика дальности для измерения расстояния между рассматриваемым транспортным средством и объектом, присутствующим впереди рассматриваемого транспортного средства.
8. Устройство управления движением транспортного средства по п. 1, в котором секция формирования изображений плана движения отличает цвет изображения различения состояний движения, указывающего состояние приведения в движение, от цвета изображения различения состояний движения, указывающего состояние торможения.
9. Устройство управления движением транспортного средства по п. 2 или 3, в котором секция формирования изображений плана движения отличает цвет изображения различения состояний движения, указывающего состояние ускорения, от цвета изображения различения состояний движения, указывающего состояние замедления.
10. Устройство управления движением транспортного средства по любому из пп. 1-3 или 6-8, в котором секция формирования изображений плана движения задает ширину изображения маршрута в диапазоне от минимальной ширины, соответствующей ширине поперечного перемещения рассматриваемого транспортного средства вследствие ошибки управления механизмом рулевого управления рассматриваемого транспортного средства, до максимальной ширины, соответствующей ширине, в которой ширина поперечного перемещения рассматриваемого транспортного средства вследствие ошибки управления механизмом рулевого управления рассматриваемого транспортного средства суммируется с шириной рассматриваемого транспортного средства.
11. Устройство управления движением транспортного средства по любому из пп. 1-3 или 6-8, в котором секция формирования изображений плана движения увеличивает охват изображения маршрута в направлении, в котором движется рассматриваемое транспортное средство, по мере того как возрастает скорость рассматриваемого транспортного средства.
12. Способ управления движением транспортного средства, включающий:
первый этап задания, на котором задают прогнозируемый маршрут движения для рассматриваемого транспортного средства;
второй этап задания, на котором составляют план движения, указывающий то, как выполнять вождение рассматриваемого транспортного средства по прогнозируемому маршруту движения, и задают либо состояние приведения в движение, либо состояние торможения рассматриваемого транспортного средства, движущегося по прогнозируемому маршруту движения, для дороги впереди рассматриваемого транспортного средства, на основе плана движения;
этап формирования, на котором формируют изображение плана движения, в котором изображения различения состояний движения, указывающие состояние приведения в движение и состояние торможения, заданные на втором этапе задания, позиционируются в изображении маршрута, соответствующем прогнозируемому маршруту движения; и
этап отображения, на котором отображают изображение плана движения на модуле отображения.
13. Способ управления движением транспортного средства, включающий:
первый этап задания, на котором задают прогнозируемый маршрут движения для рассматриваемого транспортного средства;
второй этап задания, на котором составляют план движения, указывающий то, как выполнять вождение рассматриваемого транспортного средства по прогнозируемому маршруту движения, и задают либо состояние ускорения, либо состояние замедления рассматриваемого транспортного средства, движущегося по прогнозируемому маршруту движения, для дороги впереди рассматриваемого транспортного средства, на основе плана движения;
этап формирования, на котором формируют изображение плана движения, в котором изображения различения состояний движения, указывающие состояние ускорения и состояние замедления, заданные на втором этапе задания, позиционируются в изображении маршрута, соответствующем прогнозируемому маршруту движения; и
этап отображения, на котором отображают изображение плана движения на модуле отображения.
| WO 2011010346 А1, 27.01.2011 | |||
| JP 2009244167 А, 22.10.2009 | |||
| JP 2007141178 A, 07.06.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОЙ СРЕДЕ | 2012 |
|
RU2479015C1 |
| Ботуз С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| - М.: ИПРЖ "Радиотехника", 1998 | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

