Изобретение относится к области дистанционного управления воздушными динамическими объектами.
Под воздушным динамическим объектом (ВДО) следует понимать перемещающийся в воздушном пространстве объект, оснащенный средствами, позволяющими изменять траекторию его перемещения и скорость полета по командам системы управления. Частным случаем воздушного динамического объекта является беспилотный летательный аппарат малого класса, поэтому в тексте на определенном этапе будет произведена замена термина «БПЛА» на «ВДО».
Наиболее близким по технической сущности к заявляемому изобретению является способ управления беспилотным летательным аппаратом (БПЛА) малого класса по патенту РФ №2729336 от 06.08.2020 г., бюл. №22., основанный на формировании импульсного модулированного вращающимся растром оптического излучения с широкой диаграммой направленности, перемещающегося в пространстве, излучении его в направлении БПЛА, регистрации его матричным фотоприемником (МФП) с изменяющейся диаграммой направленности, установленным на БПЛА, вычислении линейной скорости вращения растра и длительности модулированного оптического излучения, с использованием которых формируют команды управления БПЛА.
Способу присущ существенный недостаток. Согласно описанию способа, БПЛА должен перемещаться к центру источника модулированного оптического излучения (ИМОИ), однако вычисленная линейная скорость вращения растра не является достаточной информацией для оперативного формирования команд управления БПЛА, так как не дает однозначного понимания, в каком направлении и на каком расстоянии от БПЛА находится центр ИМОИ, к которому необходимо переместиться БПЛА. Поэтому процесс определения направления на центр ИМОИ в данном случае будет занимать длительное и неопределенное время, а быстродействие системы управления и ее эффективность в целом будут достаточно низкими.
Под центром источника модулированного оптического излучения (ИМОИ) следует понимать центр поперечного сечения пучка управляющего импульсного модулированного оптического излучения в плоскости апертуры оптического приемного устройства воздушного динамического объекта.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности системы управления воздушными динамическими объектами в оптическом диапазоне длин волн.
Технический результат достигается тем, что в известном способе управления ВДО, основанном на формировании импульсного модулированного вращающимся растром оптического излучения с широкой диаграммой направленности, перемещающегося в пространстве, излучении его в направлении ВДО, регистрации его матричным фотоприемником, установленным на ВДО, вводят дополнительную систему координат 0XY с началом системы координат в геометрическом центре МФП, привязывают к этой системе координат оптическое приемное устройство ВДО и поперечное сечение пучка управляющего ИМОИ в плоскости апертуры оптического приемного устройства ВДО, вычисляют координаты точки пересечения двух последовательно полученных на выходе матричного фотоприемника изображений тени от вращающегося модулирующего растра, являющейся центром ИМОИ, формируют на основе вычисленных координат сигналы управления на перемещение воздушного динамического объекта к центру ИМОИ.
Сущность изобретения заключается в определении центра поперечного сечения пучка управляющего источника модулированного оптического излучения в плоскости апертуры оптического приемного устройства воздушного динамического объекта путем вычисления координат точки пересечения двух последовательно полученных на выходе матричного фотоприемника изображений тени вращающегося модулирующего растра, являющейся центром источника модулированного оптического излучения, формировании на основе вычисленных координат сигналов управления на перемещение воздушного динамического объекта к центру источника импульсного модулированного оптического излучения.
На фиг. 1 представлены поперечное сечение управляющего вращающимся растром ИМОИ 1 в плоскости апертуры оптического приемного устройства ВДО, находящийся в этом сечении ВДО 2 и затененный вращающимся растром участок поперечного сечения в виде полосы 3. Затененный участок перемещается со скоростью вращения растра и часть его регистрируется оптическим приемным устройством ВДО.
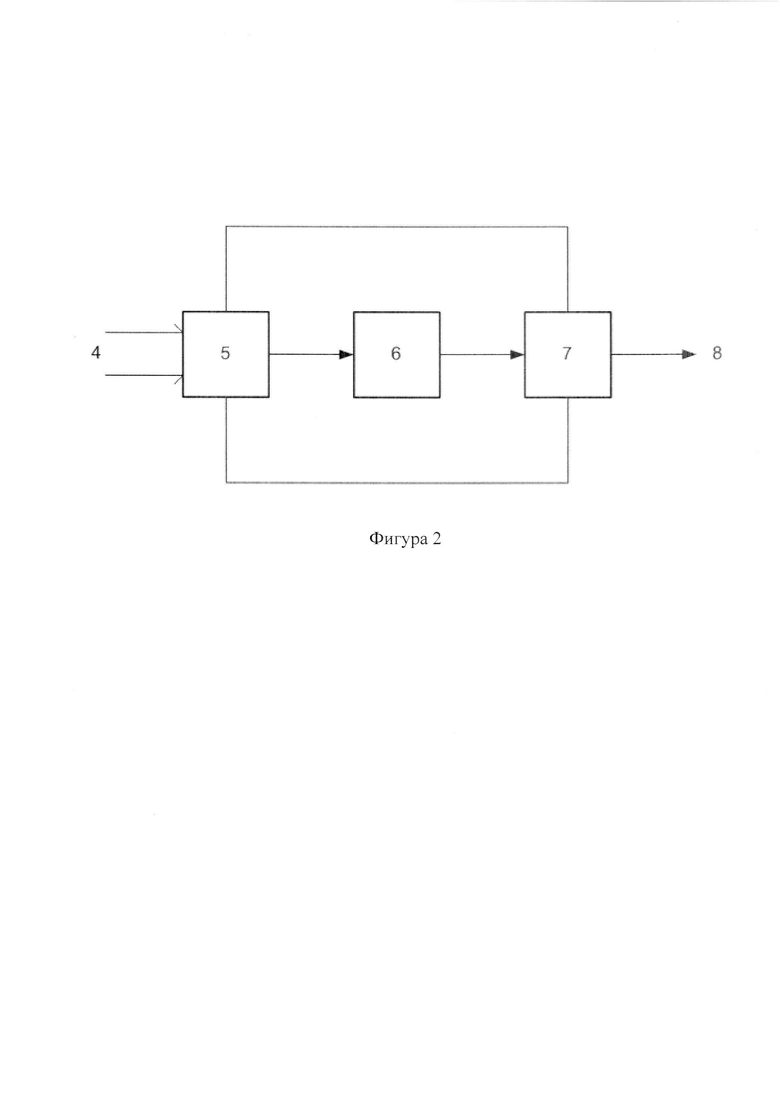
На фиг. 2 приведена структурная схема оптического приемного устройства, размещенного на борту ВДО (где обозначены: 4 - падающее на МФП управляющее оптическое излучение; 5 - МФП, 6 - блок обработки изображений (БОИ), 7 - блок вычисления координат (БВК), 8 - выходные данные для формирования команд управления траекторией перемещения ВДО).
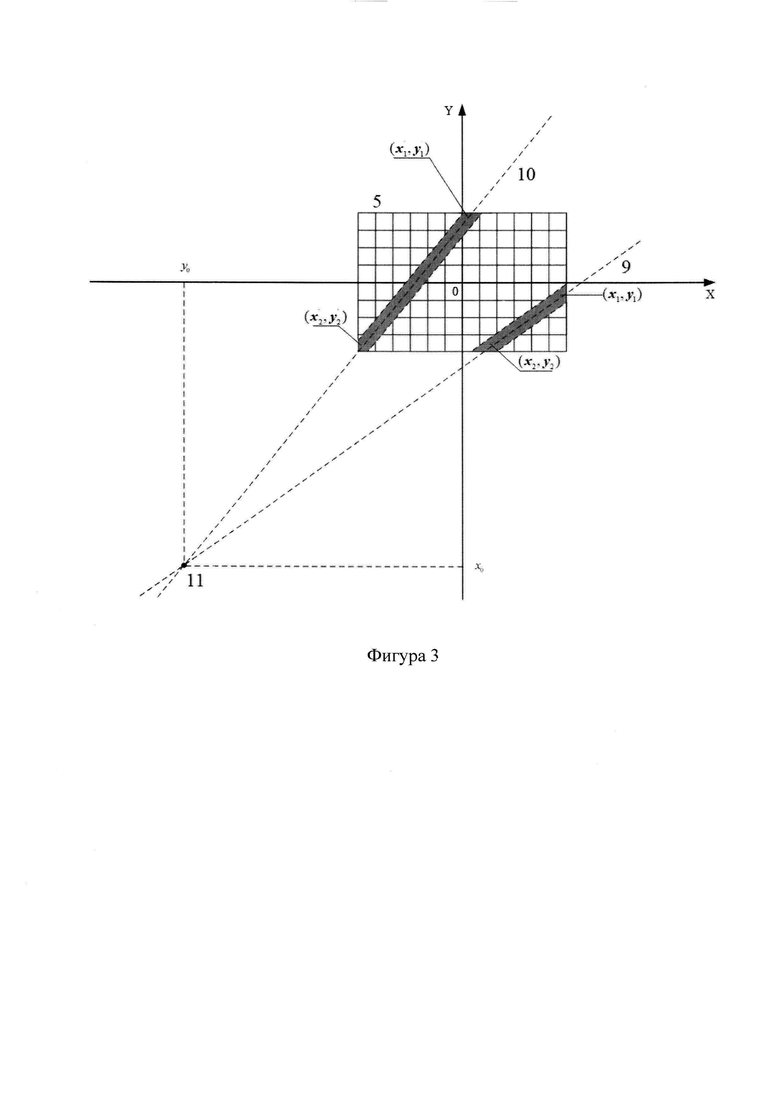
На фиг. 3 проиллюстрированы сформированные на выходе МФП изображения и определенные координаты центра ИМОИ (где обозначены: 9 - изображение затененного растром участка в момент времени t1; 10 - изображение затененного растром участка в момент времени t2, t2>t1; 11 - центр поперечного сечения ИМОИ с координатами (x0, y0)).
Устройство функционирует следующим образом. Задается система координат 0XY с начатом системы координат, совпадающим с геометрическим центром матричного фотоприемника оптического приемного устройства ВДО. В поперечном сечении управляющего ИМОИ 1 в плоскости приемного устройства ВДО 2 происходит перемещение затененного вращающимся модулирующим растром участка 3. Часть потока оптического излучения, модулированного вращающимся растром, падает на приемное устройство ВДО 2. МФП 5 фиксирует положения участков тени от растра во времени в виде изображений. Например, в момент времени t1 - полосу 9, а в момент времени t2>t1 - полосу 10. Электрические сигналы с МФП, содержащие в себе информацию о затененных модулирующим растром элементах поступают на БОИ 6, где происходит преобразование сигнала в цифровой вид с информацией о номерах затененных элементов матричного фотоприемника 5 и времени регистрации изображения. В БВК 7 для каждого из изображений, полученных в разные моменты времени, определяются координаты всех затененных растром элементов. По совокупности непосредственно прилегающих друг к другу затененных элементов определяется их принадлежность к затененной модулирующим растром полосе. Из совокупности элементов полосы выбираются два элемента, расположенные друг от друга на максимальном расстоянии (для достижения наибольшей точности). По координатам этих элементов определяется уравнение линии, являющейся продолжением затененной полосы в виде
где (х1, y1) и (x2, y2) - координаты выбранных элементов затененной полосы в момент времени t1.
Аналогично для изображения, полученного в момент времени t2
где  и
и  - координаты выбранных элементов затененной полосы в момент времени t2.
- координаты выбранных элементов затененной полосы в момент времени t2.
Решается система уравнений
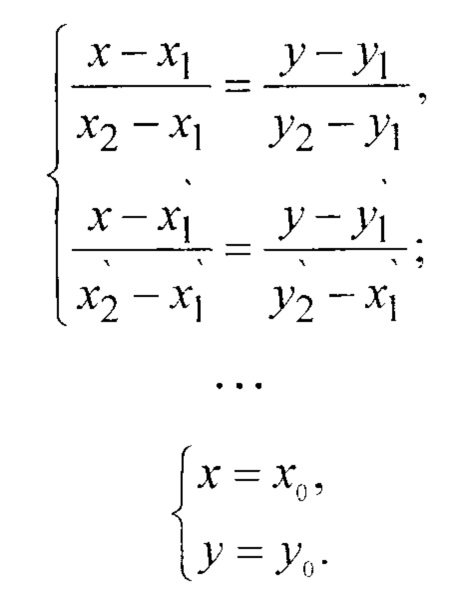
Решение системы уравнений (x0, y0) - является координатами точки пересечения данных линий, а соответственно центром ИМОИ 11. Далее БВК 7 выдает информацию с координатами центра ИМОИ 11 для формирования сигналов управления ВДО на перемещение к центру ИМОИ.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ управления воздушным динамическим объектом модулируемым лазерным лучом, перемещаемым по требуемой траектории, основанный на определении центра поперечного сечения пучка управляющего ИМОИ в плоскости апертуры оптического приемного устройства воздушного динамического объекта путем вычисления координат точки пересечения двух последовательно полученных на выходе матричного фотоприемника изображений тени вращающегося модулирующего растра, являющейся центром ИМОИ, формировании на основе вычисленных координат сигналов управления на перемещение воздушного динамического объекта к центру источника импульсного модулированного оптического излучения.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптические и радиотехнические узлы и устройства. К примеру, источником оптического излучения может служить полупроводниковый лазер ближнего инфракрасного диапазона, а в качестве приемного устройства может быть использован матричный фотоприемник ближнего инфракрасного диапазона.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ МАЛОГО КЛАССА | 2019 |
|
RU2729336C1 |
| Способ обнаружения вибрирующих объектов, основанный на анализе интерференционной картины, получаемой с использованием лазерных локационных станций гетеродинного типа | 2022 |
|
RU2791818C1 |
| Способ определения направления на источник лазерного излучения по проекции луча в плоскости наблюдения | 2022 |
|
RU2791421C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ИЗМЕРЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2021 |
|
RU2784337C1 |
| ТРЕХСПЕКТРАЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2022 |
|
RU2808963C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2020 |
|
RU2755733C1 |
| Спектрозональная обзорно-поисковая система дистанционного видеонаблюдения объектов | 2023 |
|
RU2838137C1 |
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
Изобретение относится к способу управления воздушным динамическим объектом (ВДО), модулируемым лазерным лучом, перемещаемым по требуемой траектории. Для управления ВДО формируют импульсное модулированное вращающимся растром оптическое излучение с широкой диаграммой направленности, перемещающееся в пространстве, излучают его в направлении ВДО, регистрируют его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на ВДО, вычисляют определенным образом координаты точки пересечения двух последовательно полученных на выходе матричного фотоприемника изображений тени от вращающегося модулирующего растра, являющейся центром управляющего источника модулированного оптического излучения в плоскости апертуры оптического приемного устройства воздушного динамического объекта, формируют на основе вычисленных координат сигналы управления на перемещение воздушного динамического объекта к центру управляющего источника модулированного оптического излучения. Обеспечивается повышение эффективности системы управления ВДО в оптическом диапазоне длин волн. 3 ил.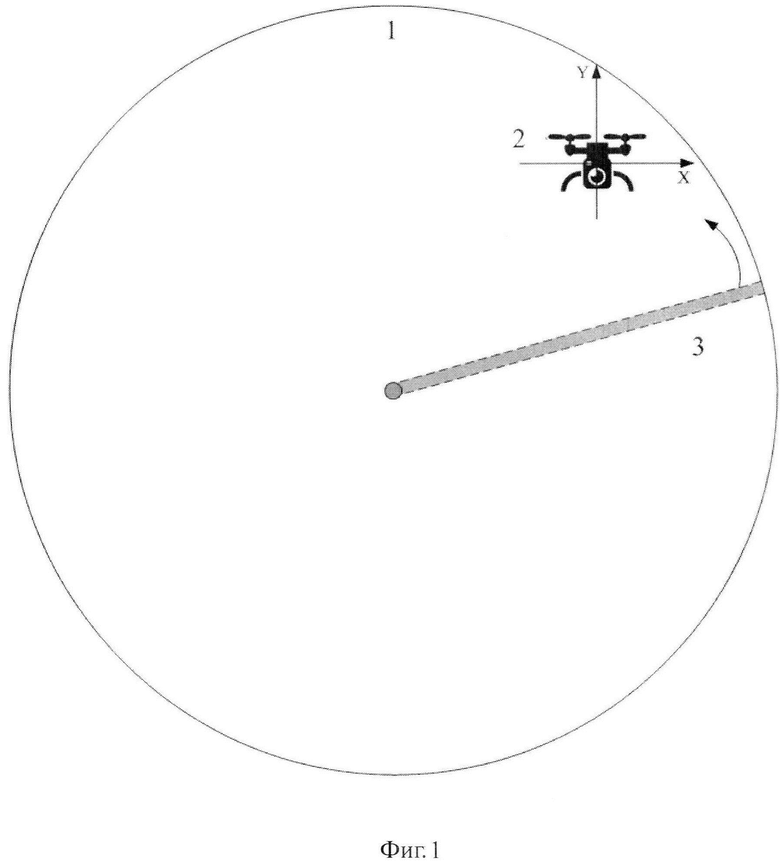
Способ управления воздушным динамическим объектом модулируемым лазерным лучом, перемещаемым по требуемой траектории, основанный на формировании импульсного модулированного вращающимся растром оптического излучения с широкой диаграммой направленности, перемещающегося в пространстве, излучении его в направлении воздушного динамического объекта, регистрировании его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на воздушном динамическом объекте, отличающийся тем, что вводят дополнительную систему координат 0XY с началом системы координат в геометрическом центре матричного фотоприемника, привязывают к этой системе координат оптическое приемное устройство воздушного динамического объекта и поперечное сечение пучка управляющего источника модулированного оптического излучения в плоскости апертуры оптического приемного устройства воздушного динамического объекта, вычисляют координаты точки пересечения двух последовательно полученных на выходе матричного фотоприемника изображений тени от вращающегося модулирующего растра, являющейся центром управляющего источника модулированного оптического излучения в плоскости апертуры оптического приемного устройства воздушного динамического объекта, формируют на основе вычисленных координат сигналы управления на перемещение воздушного динамического объекта к центру управляющего источника модулированного оптического излучения.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ МАЛОГО КЛАССА | 2019 |
|
RU2729336C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2737080C1 |
| Способ счистки отходящих газов и вентиляционного воздуха промышленности от паров ртути | 1952 |
|
SU95092A1 |
| US 20190079522 A1, 14.03.2019 | |||
| US 9991957 B2, 05.06.2018. | |||

