Изобретение относится к области управления беспилотными летательными аппаратами (БЛА).
Наиболее близким по технической сущности (прототипом) к заявляемому изобретению является система и способ беспроводного управления БЛА по патенту №WO 2007146538, МПК В64С 39/00; В64С 39/00, опубл. 2007-12-21 (ep.espacenet.com). Система включает в себя наземный пункт управления (НПУ), БЛА, оборудованный устройствами управления, устройствами передачи и приема информации, а также беспроводную систему связи между БЛА и НПУ. Способ заключается в том, что беспроводная система связи, ручные устройства ввода, приема и передачи данных, а также другие аналогичные технологии используют для связи БЛА и НПУ, передачи команд управления параметрами полета БЛА и для получения данных наблюдения с БЛА.
Аналогу присущ существенный недостаток. Низкая эффективность управления в реальном времени обусловлена недостаточными помехозащищенностью и помехоустойчивостью линии передачи команд управления.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности управления беспилотным летательным аппаратом малого класса.
Технический результат достигается тем, что в известном способе управления беспилотным летательным аппаратом малого класса, основанном на формировании команд управлении БЛА и передаче их на исполнительное устройство, формируют импульсное модулированное вращающимся растром оптическое излучение с широкой диаграммой направленности, перемещающееся в пространстве, излучают его в направлении БЛА, регистрируют его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на БЛА, вычисляют линейную скорость вращения растра и длительность модулированного оптического излучения, с использованием которых формируют команды управления БЛА.
Сущность изобретения заключается в формировании импульсного модулированного вращающимся растром оптического излучения с широкой диаграммой направленности, перемещающейся в пространстве, излучении его в направлении БЛА, регистрации его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на БЛА, вычислении линейной скорости вращения растра и длительности модулированного оптического излучения, формировании команд управления БЛА.
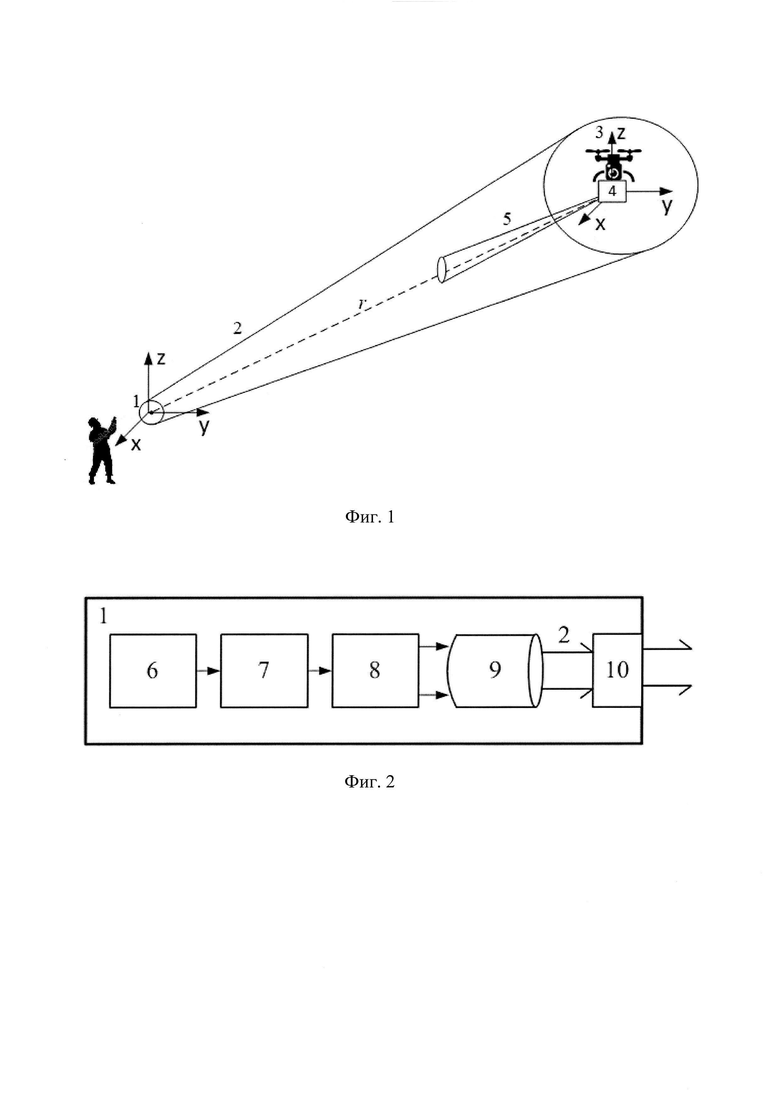
На фиг. 1 представлено взаимное расположение оператора и БЛА (где обозначены: 1 - пульт управления; 2 - импульсное модулированное оптическое излучение с широкой диаграммой направленности; 3 - БЛА малого класса; 4 - приемник оптического излучения, установленный на БЛА; 5 - изменяющаяся диаграмма направленности матричного фоторприемника). Пульт управления 1 формирует импульсное модулированное оптическое излучение (ИМОИ) с широкой диаграммой направленности 2 в направлении расположенного на расстоянии r БЛА 3, на котором установлен матричный фотоприемник 4 с изменяющейся диаграммой направленности 5.
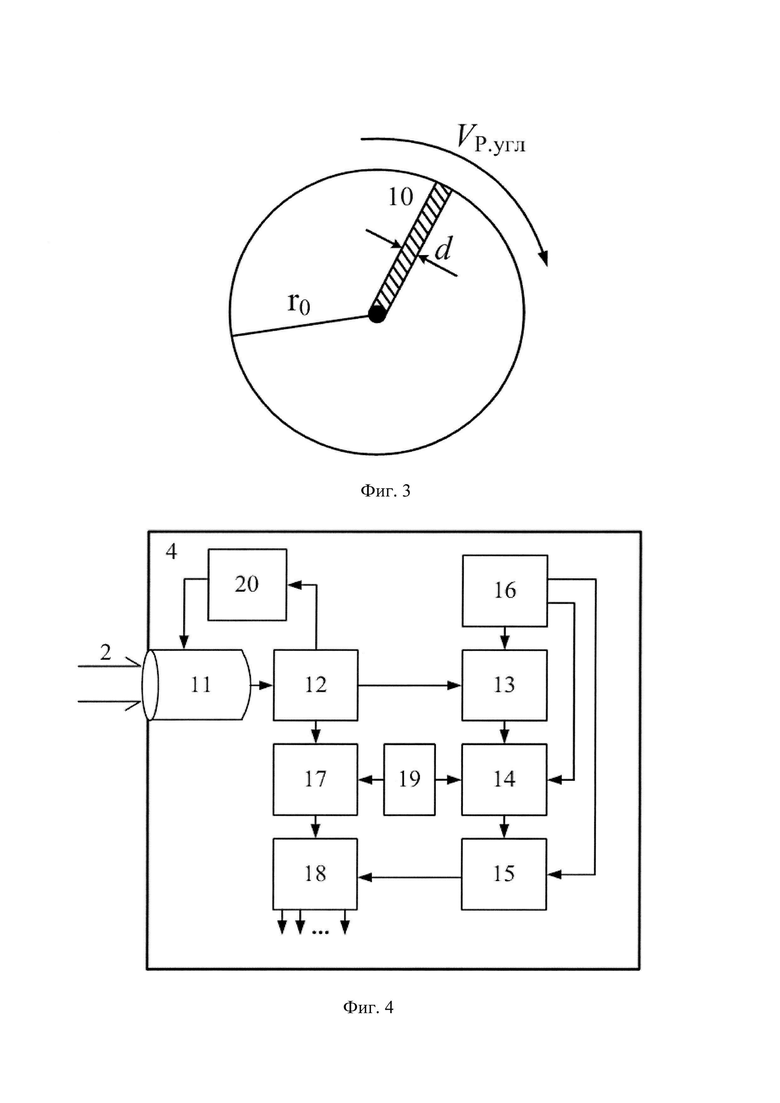
На фиг. 2 приведена схема устройства, формирующего модулированное оптическое излучение (где обозначены: 6 - блок управления; 7 - блок питания; 8 - лазер; 9 - оптическая система; 10 - вращающийся растр).
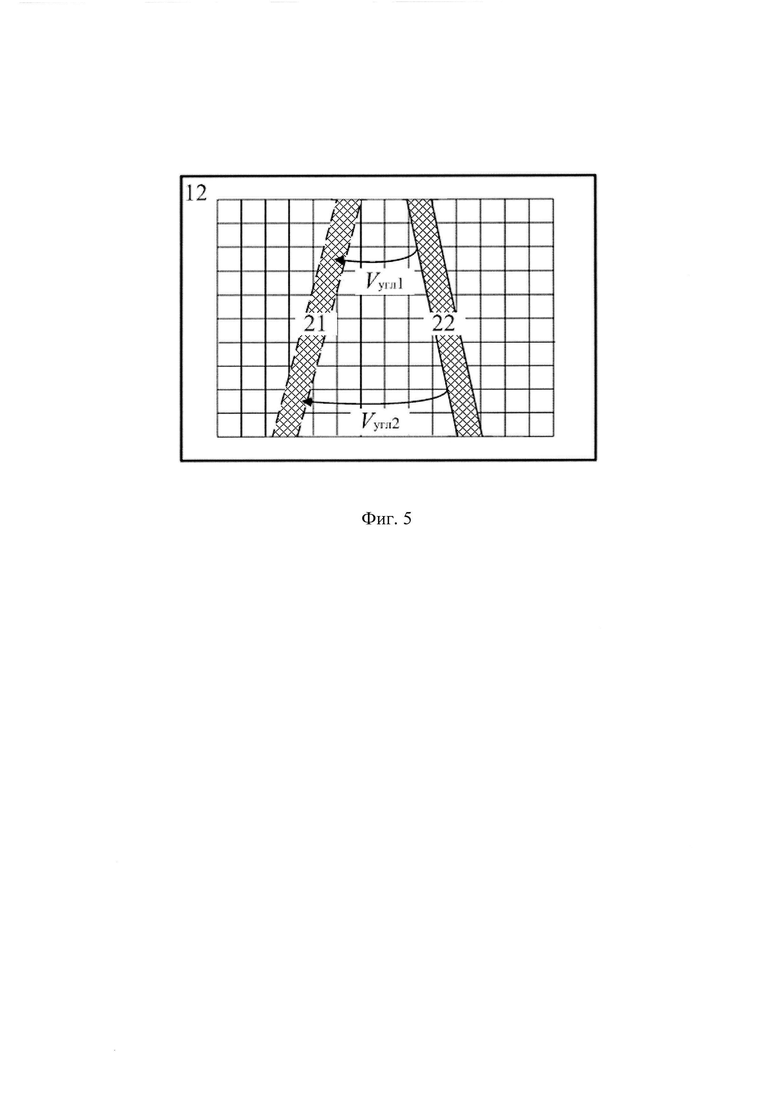
На фиг. 3 приведен процесс модуляции оптического излучения с помощью вращающегося растра (где обозначены: 10 - вращающийся растр, представляющий собой непрозрачный элемент шириной d, r0 - радиус оптического излучения).
На фиг. 4 приведена схема приемного устройства, установленного на БЛА (где обозначены: 11 - приемная оптическая система с управляемой шириной диаграммы направленности; 12 - матричный фотоприемник; 13 - блок обработки изображения; 14 - измеритель линейной скорости (ИЛС); 15 - сравнивающее устройство; 16 - формирователь тактовых импульсов; 17 - измеритель длительности импульса; 18 - блок управления винтами; 19 - блок данных; 20 - блок управления шириной диаграммы направленности оптической системы).
На фиг. 5 приведено изображение, формируемое на выходе матричного фотоприемника в разные моменты времени (где обозначены: 21 - сформированное изображение принимаемого оптического излучения в момент времени t1; 22 - сформированное изображение принимаемого оптического излучения в момент времени t2).
Устройство функционирует следующим образом. В источник ИМОИ 1 после команды включения с блока управления 6 на блок питания 7 происходит генерирование оптического излучения импульсным лазером 8. Оптическое излучение проходит через широкоугольную оптическую систему 9, которая позволяет сформировать широкую диаграмму направленности. С выхода оптической системы 9 оптическое излучение проходит через вращающийся с постоянной угловой скоростью Vр.угл., растр 10 шириной d. Сформированное на выходе вращающегося растра 10 ИМОИ направляется в сторону приемника оптического излучения 4, установленного на БЛА 3. Модулированное оптическое излучение 1 поступает на вход приемной оптической системы 11 с управляемой шириной диаграммы направленности, которая фокусирует его на матричный фотоприемник 4, работающего в режиме широкого поля зрения, с целью определения направления на источник лазерного излучения (см., А.Ю. Козирацкий, Ю.Л. Козирацкий, В.В. Капитанов, П.Е. Кулешов и др. Способ определения угловых координат на источник направленного оптического излучения. Патента на изобретение №2641637 от 18.01.2017, Россия, G01S 3/782, G01S 17/06, бюл. №2). В дальнейшем приемник оптического излучении 4 ориентируется перпендикулярно направлению распространения ИМОИ 2. При регистрации оптического сигнала матричным фотоприемником 12 по команде с блока 20 оптическая системы 11 переходит в узкопольный режим, т.е. происходит уменьшение ширины диаграммы направленности. Вследствие воздействия сфокусированного на матричный фотоприемник 12 модулированное оптическое излучение будет затеняться часть элементов матричного фотоприемника и формироваться на нем последовательно в момент времени t0 полосу 21, в момент времени t1 полосу 22 и т.д., что является изображением части вращающегося растра. С выхода матричного фотоприемника 12 электрический сигнал, содержащий в себе информацию о затененных полосами 21 и 22 элементах, поступает в блок обработки изображения 13 и в измеритель длительности импульсов 17. В блоке обработки изображения 13 происходит преобразование сигнала в цифровой вид с информацией о номерах затененных элементов матричного фотоприемника 12 и времени регистрации изображения, которое фиксируется с помощью формирователя тактовых импульсов 16. Сформированный в блоке обработки изображения 13 цифровой сигнал поступает в ИЛС 14, в котором происходит вычисление линейной скорости изображения участка вращающегося растра. Цифровой сигнал с выхода ИЛС 14, содержащий в себе информацию о линейной скорости участка растра, поступает в сравнивающее устройство 15, где происходит сравнение значений вычисленной в ИЛС 14 линейной скорости с эталонным значением линейной скорости, соответствующей случаю вращения участка растра в центре ИМОИ 2, записанным в блоке данных 19, и формирование команд управления в блок управления винтами 18. Формирование команд управления происходит до тех пор, пока разности вычисленного значения линейной скорости и эталонного не будут равны.. Команды управления поступают в блок управления винтами, тем самым происходит перемещение БЛА в пространстве к центру ИМОИ 2. В измерителе длительности импульсов 17 происходит измерение длительности импульса принимаемого ИМОИ 2, при уменьшении длительности импульса относительно заданного эталонного среднего значения БЛА, хранящегося в блоке данных 19, происходит приближение БЛА к источнику ИМОИ 1, сохраняя свое положение в центре оптического пучка, при увеличении длительности импульса происходит удаление БЛА от источника ИМОИ 1, также сохраняя свое положение в центре оптического пучка. Таким образом, перемещение БЛА в пространстве происходит за счет его следования за центром оптического пучка, отдаление и приближение относительно источника оптического излучения 1 происходит за счет изменения длительности импульсов оптического излучения, при этом информация о координатах БЛА и его скорости не передается с помощью ИМОИ 2.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ управления БЛА малого класса, основанный на формировании вращающимся растром оптического излучения с широкой диаграммой направленности, перемещающейся в пространстве, излучения его в направлении БЛА, регистрации его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на БЛА, вычислении линейной скорости вращения растра и длительности модулированного оптического излучения, с использованием которых формируют команды управления БЛА.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптические и радиотехнические узлы и устройства. Например, в качестве лазера может быть использован полупроводниковый лазер, а в качестве матричного фотоприемника - оптико-электронный координатор матричного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДИНАМИЧЕСКИМ ОБЪЕКТОМ МОДУЛИРУЕМЫМ ЛАЗЕРНЫМ ЛУЧОМ, ПЕРЕМЕЩАЕМЫМ ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ | 2022 |
|
RU2788995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата | 2023 |
|
RU2816540C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВАРИЙНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ЗАДАННОМ РАЙОНЕ ПРИ ВЫПОЛНЕНИИ МОНИТОРИНГА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И ПОТЕРИ СВЯЗИ С НАЗЕМНЫМ ПУНКТОМ УПРАВЛЕНИЯ | 2021 |
|
RU2805304C2 |
Изобретение относится к способу управления беспилотным летательным аппаратом малого класса. Для управления беспилотным летательным аппаратом формируют импульсное модулированное вращающимся растром оптическое излучение с широкой диаграммой направленности, перемещающееся в пространстве, излучают его в направлении беспилотного летательного аппарата, регистрируют его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на беспилотном летательном аппарате, вычисляют линейную скорость вращения растра и длительность модулированного оптического излучения, с использованием которых формируют команды управления беспилотным летательным аппаратом, передают команды управления на исполнительное устройство. Обеспечивается повышение эффективности управления беспилотным летательным аппаратом, повышение помехозащищенности и помехоустойчивости. 5 ил.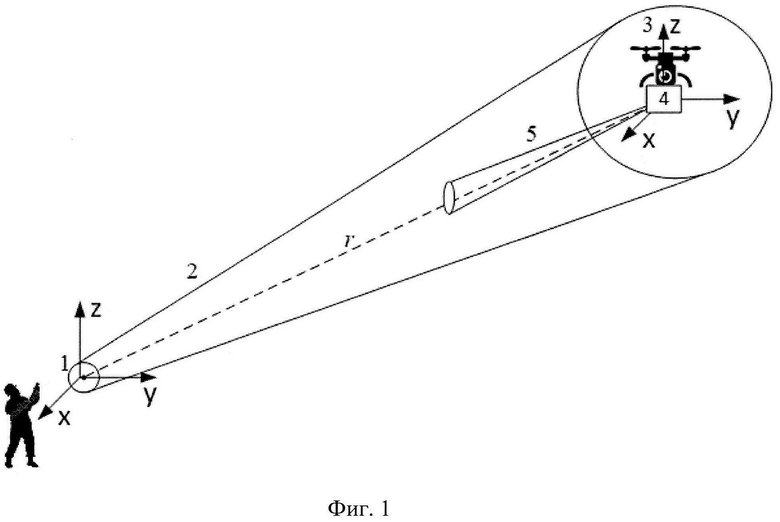
Способ управления беспилотным летательным аппаратом малого класса, основанный на формировании команд управлении беспилотным летательным аппаратом и передаче их на исполнительное устройство, отличающийся тем, что формируют импульсное модулированное вращающимся растром оптическое излучение с широкой диаграммой направленности, перемещающееся в пространстве, излучают его в направлении беспилотного летательного аппарата, регистрируют его матричным фотоприемником с изменяющейся диаграммой направленности, установленным на беспилотном летательном аппарате, вычисляют линейную скорость вращения растра и длительность модулированного оптического излучения, с использованием которых формируют команды управления беспилотным летательным аппаратом.
| Способ счистки отходящих газов и вентиляционного воздуха промышленности от паров ртути | 1952 |
|
SU95092A1 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2017 |
|
RU2687989C2 |
| СПОСОБ ПРИЕМА И ПЕРЕДАЧИ ИНФОРМАЦИИ ОПТИЧЕСКИМ СИГНАЛОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2192710C2 |
| WO 2019011111 A1, 17.01.2019 | |||
| CN 0109032179 A, 18.12.2018. | |||

