ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к отфильтрованной обратной проекции. В частности, изобретение относятся к отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, вычислительному устройству, машиночитаемому носителю и программному элементу.
УРОВЕНЬ ТЕХНИКИ
Реконструкция изображения становится все более важной в последние несколько лет, в особенности в области медицинской визуализации. Томография с ограниченным углом обзора объекта все больше и больше применяется в интервенционной и диагностической рентгеновской визуализации. Примерами являются интервенционные системы с C-образной дугой с использованием сбора данных на уменьшенном диапазоне углов, томосинтез маммографии или томосинтез для приложений RAD. Дополнительно используются селекторные сигналы, представляющие дыхательное или сердечное движения, для уменьшения диапазона углов, доступного для реконструкции. В случае ограниченного диапазона углов, итерационная реконструкция является очень гибкой реконструкцией, которая может применяться. Например, могут быть отмечены методики алгебраической реконструкции (ART), методики одновременной алгебраической реконструкции (SART) или методика одновременной итерационной реконструкции (SIRT). Предшествующий уровень техники может включаться для упорядочивания реконструкции. Одним из недостатков итерационной реконструкции является ее высокий вычислительный объем работ и невозможность выполнения реконструкций области интереса (ROI). Например, US 2007/0053556 и US 2007/0093711 A1 описывают способы итерационной реконструкции данных.
В качестве технически отличного варианта в области техники используется отфильтрованная обратная проекция (FBP) для того, чтобы реконструировать изображения. В известной области техники с FBP математически точные фильтры, выведенные для полного сбора данных, например, из геометрии компьютерной томографии (CT), являются приспособленными для FBP, когда они применяются к томографии с ограниченным углом обзора объекта. Это может основываться на индивидуальных отпечатках результатов реконструкции в реконструированных изображениях. Такие фильтры могут рассматриваться как эвристически сгенерированными фильтрами. Таким образом, способы FBP используют адаптированные фильтры, которые имеют целью снижение влияния неполного сбора данных для реконструкций и сгенерировать отпечатки изображений, которые являются преимущественными для цели клинического приложения томографии с ограниченным углом обзора объекта. Однако выведение фильтров не является математически постоянным и, следовательно, может привести к результатам реконструкции изображения, которые являются более плохими по сравнению с известными итерационными способами при применении к неполному набору данных.
Помимо всего прочего, известные способы отфильтрованной обратной проекции (FBP) не применяются непосредственно к неполному набору данных по проекциям, как, например, набор данных томографии с ограниченным углом обзора объекта. Например, сканирование груди может использовать только диапазон углов в +/-10°, что приводит к абсолютному диапазону углов в 20°. Это усложняет реконструкцию изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Может иметься потребность обеспечить быструю и высокого качества реконструкцию изображения набора данных томографии с ограниченным углом обзора объекта. Может иметься дополнительная потребность для обеспечения результатов реконструкции, эквивалентную итерационной реконструкции, в то же время позволяющую реконструкцию области интереса.
Настоящее изобретение обеспечивает упомянутые потребности. Целью настоящего изобретения является обеспечить усовершенствованную реконструкцию изображения.
Цель настоящего изобретения решается при помощи предмета изложения независимых пунктов формулы изобретения. Дополнительные варианты осуществления и преимущества изобретения объединены в зависимые пункты формулы изобретения.
Описанные варианты осуществления аналогичным образом относятся к способу реконструкции изображения для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, вычислительному устройству для реконструкции изображения для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, машиночитаемому носителю и программному элементу. Эффекты совместного действия могут возрастать от различных комбинаций вариантов осуществления, хотя они могут не описываться подробно.
Далее следует отметить, что все варианты осуществления настоящего изобретения, касающиеся способа, могут выполняться с описанной последовательностью этапов, однако это не является единственной и обязательной последовательностью этапов способа. Все различные последовательности и комбинации этапов способа описываются настоящим описанием.
В контексте настоящего изобретения данные p проекций томографии с ограниченным углом обзора объекта был/были сгенерированы томографией с использованием менее чем 180° в обхвате объекта, например, человеческой груди, которая исследуется при помощи томографии.
В контексте настоящего изобретения термин «фильтр» будет пониматься как фильтрующий оператор, который вычисляется аналитически на основе числа проекций, содержащихся в данных p проекций, и/или покрывающейся области углов томографии с ограниченным углом обзора объекта, при помощи которой данные p были сгенерированы. Также могут использоваться другие геометрические параметры томографии для определения или описания упомянутой геометрии.
В соответствии с примерным вариантом осуществления предоставляется способ реконструкции изображения для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта. Настоящий способ содержит этапы получения данных p проекций объекта O, причем данные p проекций описывают N проекций объекта O, каковые N проекций были сгенерированы с конкретной геометрией томографии с ограниченным углом обзора объекта. Помимо всего прочего, способ содержит этап применение фильтрующего оператора X к данным p проекций для генерирования данных Xp отфильтрованных проекций, причем Xp описывает N отфильтрованных проекций объекта O, и X определяется таким образом, что каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Помимо всего прочего, способ определяет этап вычисления обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp).
Другими словами, данные Xp отфильтрованных проекций описывают N отфильтрованных проекций. Каждая из этих отфильтрованных проекций вычисляется из всех проекций набора данных p томографии с ограниченным углом обзора объекта при помощи применения фильтра X к каждой из этих проекций перед объединением их в каждую отфильтрованную проекцию. Таким образом, каждая отфильтрованная проекция зависит от всех других проекций, которые были получены как часть этого набора данных проекций томографии с ограниченным углом обзора объекта.
Представленный способ обеспечивает более высокую стабильность по отношению к шуму и обеспечивает правильное рассмотрение избыточных данных.
Здесь фильтр X может конфигурироваться таким образом, что Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Здесь данные p проекций должны пониматься как данные p проекций томографии с ограниченным углом обзора объекта. Помимо всего прочего, N является целым числом, равным, например, 1, 2, 3, 4 и т.д.
Для обнаружения того, что используется представленный способ настоящего изобретения, следует отметить следующее. В случае, если данный набор данных p содержит одну проекцию, содержащиеся данные и все другие проекции содержат в себе 0, то представленный способ обеспечивает изображение с определенным признаком. Для направлений, которые связаны с проекциями, содержащими только 0, способ настоящего изобретения добавляет высоко- и низко-частотную информации. В противоположность этому, способы предшествующего уровня техники в этом случае способны только обеспечивать низко-частотную информацию или 0. Это станет более очевидным в контексте описания ниже.
Фильтрующий оператор X, используемый настоящим изобретением, гарантирует то, что все N проекций или отображений, которые содержатся в составе данных p, используются для того, чтобы сгенерировать отфильтрованные данные Xp. Это станет более очевидным в контексте следующего описания, в котором генерирование и использование X будет объяснено подробно.
В противоположность упомянутой реконструкции предыдущего уровня техники, настоящему изобретению не требуются несколько этапов итерации. Применение фильтрующего оператора X к данным p проекций, также как и формирование обратной проекции при помощи оператора B обратной проекции, требует только одной итерации, обратной проекции, и, таким образом, обеспечивает непосредственное решение лежащей в основе математической задачи. Другими словами, настоящее изобретение обеспечивает непосредственный и не итерационный путь реконструкции изображения при помощи единственного и эффективного фильтрующего оператора X.
Другими словами, представляется способ фильтрации обратных проекций, который использует очень специализированный фильтрующий оператор X. Представленный способ использует обстоятельство, заключающееся в том, что в томографии с ограниченным углом обзора объекта могут эффективно использоваться специальные траектории излучающего источника относительно детектора. Например, если упомянутая траектория определяется лежащей внутри плоскости, которая является перпендикулярной к плоскости, которая определяется элементами детектора, то фильтрующий оператор X, как определено в настоящем изобретении, обеспечивает несколько преимуществ для ускоренной реконструкции изображения с сопоставимым качеством в сравнении с известными реконструкции. Фильтрующий оператор X может, например, реализовываться в виде (PB)+, но также возможны другие фильтрующие операторы X, которые зависят от геометрии томографии с ограниченным углом обзора объекта.
Вследствие этого, при помощи выбора или определения конкретной геометрии томографии для генерирования данных p проекций фильтрующий оператор X настоящего изобретения уже является определенным математическим образом. Фильтрующий оператор X может вычисляться аналитическим образом и может только зависеть от конкретной геометрии томографии, подобной количеству проекций, снимаемых в течение томографии с ограниченным углом обзора объекта, и подобной покрываемому диапазону углов томографии с ограниченным углом обзора объекта. Все параметры, которые определяют геометрию генерирования данных, определяют генерирование фильтра. Они представляют собой форму и размер детектора, количество позиций источника, с каковых позиций генерируются проекции, точное положение каждой позиции источника по отношению к детектору и максимальная высота проецируемого объекта над детектором.
Фильтр X может вычисляться единожды и затем использоваться для реконструкции всех наборов данных, полученных с той же самой геометрией проекций. Это может создать преимущество по времени.
Например, медицинское устройство или, в особенности, томографическое устройство или вычислительное устройство в соответствии с настоящим изобретением может вычислять фильтрующий оператор X на основе исключительно данных геометрии томографии с ограниченным углом обзора объекта.
В настоящем описании термин «использование оператора B обратной проекции для генерирования изображения B(Xp) реконструкции» будет пониматься как генерирование реконструированного изображения B(Xp) при помощи применения оператора B обратной проекции к данным Xp отфильтрованных проекций. Другими словами, отфильтрованные проекции Xp являются обратно проецированными к объему реконструкций.
Фильтрующий оператор X, который может полностью определяться математическим образом при помощи геометрии, которая использовалась для генерирования данных p, может реализовываться различными путями. Например, фильтрующий оператор X реализуется в виде объединения оператора данных P проекций и оператора B обратных проекций. Такой составной оператор PB может дополнительно преобразовываться для того, чтобы сформировать его в составной оператор (PB)+ обобщенной инверсии. Как будет описываться позже, такой составной оператор PB обеспечивает несколько преимуществ настоящего изобретения.
В соответствии с другим примерным вариантом осуществления фильтрующий оператор X реализуется в виде оператора (PB)+ обобщенной инверсии.
Таким образом, X может составляться из оператора B обратной проекции и соответствующего сопряженного оператора P проекции.
Другими словами, фильтрующий оператор X может выводиться при помощи предписания изображению f являться реконструированным при условии, которое согласуется с данными p проекций, сгенерированными томографией. Это условие описывается уравнением Pf=p. Как правило, существует более одного решения f, удовлетворяющего этому условию. Одно с минимальной нормой задается при помощи f=P+p, где P+ является обобщенной инверсией P. Благодаря отношению P и B, являющимися сопряженными операторами, как объяснялось выше, это решение может быть переписано как f=B(PB)+p. Следовательно, когда фильтрующий оператор X выбран в виде (PB)+, решение f=B(Xp) удовлетворяет условию, согласующемуся с данными проекций.
Вариант осуществления фильтрующего оператора (PB)+ дает возможность эффективного получения изображения f, которое согласуется со всеми данными p проекций, т.е. изображение f удовлетворяет уравнению Pf=p. Это объясняется в следующем.
Сначала для этой цели определяется обобщенная инверсия, также известная как псевдоинверсия Мура-Пенроуза. Для линейного оператора P, оператор P+ обобщенной инверсии может определяться как оператор, присваивающий любому p решение f+ с минимальной нормой линейного уравнения Pf=p с неизвестным f. Решение с минимальной нормой определяется как единственное решение с минимальной нормой упомянутого уравнения. Следовательно, в случае, когда p обозначает измеренные данные проекций, можно сказать, что решение f+=P+p с минимальной нормой согласуется с данными p проекций.
Теперь обобщенную инверсию P+ можно переписать как P+=B(PB)+. Это равенство является результатом свойства оператора обобщенной инверсии и того факта, что B является сопряженным P, как объяснялось вышеизложенным и нижеизложенным. Следовательно, решение с минимальной нормой для Pf=p для измеренных данных p проекций задается при помощи f+=P+p= B(PB)+p. Это показывает, что изображение, реконструированное в соответствии с выражением B(Xp), согласуется с измеренными данными p проекций, если фильтрующий оператор X реализуется в виде (PB)+. Таким образом, получается улучшенное качество изображения при помощи настоящего изобретения.
Другими словами, в этом варианте осуществления фильтрующий оператор X может полностью, исключительно, вполне и/или непосредственно определяться при помощи конкретного математического описания геометрии томографии, которая использовалась, когда данные p проекции генерировались в течение томографии с ограниченным углом обзора объекта. Другими словами, фильтрующий оператор X может полностью математически определяться геометрией, которая использовалась для генерирования данных p. Вследствие этого, эвристические определения X исключаются при помощи настоящего изобретения. Можно понять, что каждая пространственная геометрия, которая применима для томографии с ограниченным углом обзора объекта, может соответствовать одному фильтру X.
Как будет описано позже, также могут выполняться дополнительные этапы такие как, например, этапы регуляризации, которые изменяют характер определения фильтра X -с чисто математического в смешанный характер, т.е., во-первых, являющегося определенным математическим образом и, во-вторых, являющегося исправленным, например, при помощи регуляризации. Например, идеальный фильтрующий оператор (PB)+ может исправляться таким образом, что малые значения в матрице заменяются 0 для упрощения вычисления. Также в качестве этапа регуляризации может выполняться этап сжатия высоких частот.
Оператор PB проекции может содержать, по меньшей мере, одну свертку двух математических функций. При преобразовании упомянутого оператора PB проекции посредством преобразования Фурье в частотное пространство, преобразованный оператор P проекции содержит несколько перемножений математических функций. Благодаря преобразованию оператора PB проекции в частотное пространство при помощи настоящего изобретения обеспечивается очень эффективное вычисление желаемого реконструированного изображения. Это будет объяснено в дальнейшем в настоящем документе более подробно. При помощи упомянутого преобразования представление оператора PB проекции упрощается, и вычислительные затраты реконструкции снижаются при помощи настоящего изобретения. Его подробности и преимущества будут описаны и станут более очевидными в дальнейшем в настоящем документе.
Следует понимать, что в соответствии с настоящим изобретением численное вычисление операторов P и B не является обязательно необходимым. Только для определения PB, в особенности, для аналога PB в частотном пространстве, вычисления являются необходимыми.
Точное вычисление P само по себе может не являться необходимым для настоящего изобретения. B используется для выполнения обратной проекции в конце способа в соответствии с примерным вариантом осуществления изобретения. Однако также для B численные вычисления не являются обязательно необходимыми.
В соответствии с другим примерным вариантом осуществления оператор P проекции в виде, используемом выше и ниже, может определяться линейными интегралами по функции O объекта. Более конкретно, P состоит из операторов P1, P2, … PN, с N, обозначающим число полученных проекций. Каждый Pi описывает всего одну проекцию функции O объекта и определяется линейными интегралами по функции O объекта. Тогда в векторном обозначении P можно записать в виде P=(P1, P2, … PN)t. Тогда оператор B обратной проекции в виде, используемом выше и ниже, определяется единственным образом как сопряженный оператор к P. В векторном обозначении он может определяться в виде B=(B1, B2, … BN), где для каждого i Bi является сопряженным вектором или матрицей Pi.
Сопряженный вектор или матрица данного вектора может без труда выводиться специалистом в данной области техники.
Среди прочего это означает, что используемый фильтрующий оператор X=(PB)+ определяется при помощи всех проекций, полученных в течение томографии с ограниченным углом обзора объекта. Другими словами, фильтрующий оператор (PB)+, как он может использоваться в примерном варианте осуществления настоящего изобретения, основывается на всех N проекциях, полученных в результате генерирования данных p.
В соответствии с другим примерным вариантом осуществления изобретения способ дополнительно содержит этап выполнения преобразования Фурье данных p проекций вдоль траектории излучающего источника, каковая траектория использовалась для генерирования данных p проекций, умножая значения всех N проекций, касательно электромагнитного частотного компонента k, на фильтрующий оператор для формирования умноженных данных Xk, и выполняя обратное преобразование Фурье умноженных данных Xk. Электромагнитный частотный компонент может рассматриваться как компонент спектра, который был обнаружен в течение генерирования данных p томографии с ограниченным углом обзора объекта.
Компоненты k каждой проекции из N проекций могут представляться, например, в виде вектора, который затем умножается на матрицу X=(PB)+. Также возможны другие математические представления.
Это может повторяться для всех или практически для всех частотных компонентов.
В соответствии с другим примерным вариантом осуществления изобретения способ дополнительно содержит этап создания геометрических данных d, описывающих конкретную геометрию томографии, используемую для генерирования данных p проекций.
Например, геометрические данные d могут содержать число проекций, т.е. число отображений, которые были сгенерированы в течение томографии с ограниченным углом обзора объекта, которая сгенерировала данные p проекций. Дополнительным образом или альтернативным образом, покрываемый диапазон углов выполненной томографии с ограниченным углом обзора объекта может сохраняться в геометрических данных d. Также другие параметры могут сохраняться в упомянутом наборе данных d.
Геометрические данные d могут генерироваться томографическим устройством, которое выполняет томографию с ограниченным углом обзора объекта. Упомянутые данные могут сохраняться и/или передаваться вычислительному устройству, которое выполняет способ настоящего изобретения. Если требуется, то томографическое устройство само использует геометрические данные d для того, чтобы выполнить способ настоящего изобретения так, что генерируется реконструированное изображение анализируемого объекта O. Такое реконструированное изображение объекта O может выводиться пользователю на дисплей, который является частью томографического устройства или вычислительного устройства. Это применяется к этому и каждому другому варианту осуществления настоящего изобретения.
В соответствии с другим примерным вариантом осуществления изобретения предоставленные геометрические данные, описывающие конкретную геометрию томографии, являются основой для вычисления фильтрующего оператора X.
Другими словами, в соответствии с этим примерным вариантом осуществления изобретения фильтрующий оператор X вычисляется на основе геометрических данных d. Другими словами, фильтрующий оператор X определяется чисто математическим образом при помощи геометрических данных d. Как описывалось ниже и выше, геометрические данные d могут, например, содержать число проекций и/или покрываемый диапазон углов выполненной томографии с ограниченным углом обзора объекта.
В соответствии с другим примерным вариантом осуществления изобретения способ содержит этапы вычисления оператора P проекции, вычисления оператора B обратной проекции, генерирования составного оператора PB, генерирование операции (PB)+ обобщенной инверсии, причем оператор (PB)+ обобщенной инверсии используется в качестве фильтрующего оператора X, как описывалось выше и в дальнейшем в настоящем документе. Помимо всего прочего, этот примерный вариант осуществления изобретения содержит этап применения оператора (PB)+ обобщенной инверсии в качестве фильтрующего оператора к данным p проекций для создания данных (PB)+p отфильтрованных проекций. В этом варианте осуществления этап S3 вычисления обратной проекции генерирует реконструированное изображение объекта, каковое реконструированное изображение называется B(PB)+p.
Если требуется, то источник процесса томографии с ограниченным углом обзора объекта отодвигается от зафиксированного детектора вдоль или строк, или столбцов детектора. В этом и любом другом примерном варианте осуществления изобретения передвижение излучающего источника относительно детектора может происходить по прямой линии или также может являться круговым. Для того, чтобы обеспечить вычисление фильтра X, может являться важным то, что излучающий источник движется в пределах плоскости, которая является перпендикулярной к плоскости, определенной детектором. Таким образом, траектория излучающего источника может представлять собой прямую линию на постоянной высоте над детектором.
Таким образом, в представленном способе используют специальную геометрию томографии, которая создает возможность для надлежащего вычисления для решения высокого качества такого, как реконструированное изображение высокого качества.
В ходе этого представленный способ добивается того, что реконструированное изображение согласуются с данными проекции, хотя данные проекции появляются из томографии с ограниченным углом обзора объекта и могут, таким образом, рассматриваться как неполные. Другими словами, используемый фильтрующий оператор X настоящего изобретения имеет прямую и вполне определенную зависимость в отношении к пространственной геометрии, с которой данные p проекций были записаны. Представленный способ не определяет фильтрующий оператор X итерационным образом, но определяет фильтрующий оператор X непосредственно. Помимо всего прочего, настоящее изобретение не определяет решение лежащей в основе математической задачи итерационным образом, но определяет решение, т.е. реконструированное изображение высокого качества, непосредственно.
Причиной предоставленной возможности высокой скорости вычисления настоящего изобретения является, в том числе, понимание сути вышеописанной и нижеописанной специальной геометрии томографии, использованной в пределах томографии с ограниченным углом обзора объекта. Эта геометрия может рассматриваться как перпендикулярная геометрия. Тогда фильтрующий оператор X может составляться из P и B, причем оператор P проекции уже мог бы являться преобразованным посредством преобразования Фурье в частотное пространство. Помимо всего прочего, может генерироваться обобщенная инверсия упомянутого составного оператора PB, (PB)+. Это может рассматриваться как фильтрующий оператор (PB)+, который применяется к неполным данным p, созданным в течение томографии с ограниченным углом обзора объекта. В случае, когда излучающий источник перемещается в пределах плоскости, которая является перпендикулярной плоскости, определенной детектором, настоящее изобретение выигрывает от возможного эффективного математического определения (PB)+.
Если требуется, то окончательное реконструированное изображение может выводиться на экран пользователю. Если требуется, то окончательное реконструированное изображение может сравниваться с другим изображением, сгенерированным известным итерационным способом реконструкции, подобным, например, SART.
В случае томографии с ограниченным углом обзора объекта при помощи, например, CT, траектория используемого излучающего источника, т.е., например, рентгеновского источника, может определяться в пределах плоскости, каковая плоскость является перпендикулярной к плоскости, определенной элементами сенсора или детектора. Настоящее изобретение обеспечивает, в том числе, понимание сути того, что в таком случае фильтрующий оператор X, который применяется к данным p проекций, обеспечивает несколько преимуществ, если реализуется в виде оператора (PB)+ обобщенной инверсии.
В случае такой конкретной геометрии томографии, как ранее описанная траектория источника томографии с ограниченным углом обзора объекта, составной оператор PB может математическим образом представляться как составной оператор, содержащий математические свертки. При выполнении оператора PB проекций посредством преобразования Фурье в частотное пространство, может использоваться преимущество в том, что PB представляется математическим образом при помощи перемножений свернутых функций. Это может привести к выигрышу в эффективности при вычислении реконструированного отображения благодаря настоящему изобретении. Изобретатели настоящего изобретения сделали открытие в том, что использование составного оператора (PB)+ обобщенной инверсии обеспечивает реконструкцию изображения для отфильтрованной обратной проекции, которая является быстрой и дает в результате качество изображения, которое может являться таким же высоким, как и качество изображения известных итерационных способов реконструкции. Помимо всего прочего, артефакты в пределах реконструированного изображения значительно уменьшаются при помощи настоящего изобретения.
Другими словами, представленный примерный вариант осуществления изобретения обеспечивает отфильтрованную обратную проекцию с изобретенным фильтрующим оператором X, который непосредственно и исключительно зависит от используемой геометрии томографии в течение сбора данных с ограниченным углом обзора объекта, результатом чего являются данные p проекций. Следовательно, при данной геометрии сбора данных составной оператор PB может вычисляться только единожды. Другими словами, различные объекты могут анализироваться или осматриваться при помощи томографии с ограниченным углом обзора объекта, один и тот же способ и один и тот же оператор X, например, реализованный в виде составного оператора (PB)+ обобщенной инверсии, могут использоваться для этих и различных измерений. Это преимущество настоящего изобретения делает понятной непосредственную и определенную зависимость фильтрующего оператора X от конкретной геометрии томографии, используемой для сбора данных с ограниченным углом обзора объекта.
В соответствии с другим примерным вариантом осуществления изобретения фильтрующий оператор X содержит составной оператор PB, причем оператор PB представляет собой составной оператор, содержащий/имеющий в составе, по меньшей мере, одну свертку двух математических функций.
Такое представление оператора PB проекций настоящего изобретения извлекает преимущества из возможности преобразования такого оператора в частотное пространство. Соответствующее представление в частотном пространстве упомянутого составного оператора P проекций содержит несколько перемножений упомянутых математических функций. Это упрощает вычисление, которое требуется сделать для того, чтобы сгенерировать реконструированное изображение объекта O.
В соответствии с другим примерным вариантом осуществления изобретения способ содержит этап преобразования оператора PB проекций при помощи преобразования Фурье в частотное пространство, причем оператор PB проекций, преобразованный в частотное пространство, содержит/состоит из нескольких перемножений математических функций.
В нижеследующем объясняются преимущества и эффективное вычисление фильтра (PB)+ в частотном пространстве.
В случае, когда излучающий источник перемещается по прямой линии, параллельной плоскости, определенной детектором, возможным является очень эффективное математическое определение (PB)+. Использование аппроксимированных настроек, как правило, вызывает только небольшую потерю точности в реконструированном изображении. Эта величина потери в точности зависит от того, насколько траектория, по которой излучающий источник перемещается, отличается от прямой линии, параллельной плоскости детектора. Настоящее изобретение извлекает пользу из этого понимания сути.
При настройке излучающего источника таким образом, что он перемещается по прямой линии, параллельной плоскости, определенной детектором, которая может использоваться для аппроксимации более общих настроек, как объяснялось выше, может выполняться эффективное математическое определение (PB)+, как описывается в нижеследующем. Сначала, следует отметить, что описанная настройка источника, перемещаемого по прямой линии, параллельной плоскости, определенной детектором, позволяет обращаться с трехмерной задачей реконструкции как с набором двухмерных задач. Они соответствуют двухмерности, где каждая такая плоскость, определенная прямой линией траектории источника, и прямой линии на детекторе, параллельной траектории источника. Следовательно, для реконструкции является достаточным рассмотреть соответствующие двухмерные задачи.
Вышеописанные определения операторов P и B в виде P=(P1, P2, … PN)t и B=(B1, B2, … BN) дают в результате составной оператор PB, который может записываться в виде матрицы со входными данными, являющимися составными операциями PiBj для i, j =1, …, N. В случае, когда траектория источника имеет постоянную высоту над детектором, каждая такая операция PiBj может описываться как свертка с ядром свертки ограниченного носителя. Это описание PiBj в виде свертки проиллюстрировано на описанной ниже фиг. 8. Операции PiBj теперь могут преобразовываться в частотный интервал. По теореме свертки в частотном интервале операции PiBj представляются в виде перемножений. Для дискретных вариантов операций PiBj, которые будут использоваться численного вычисления фильтра, это означает, что они представлены в виде диагональных матриц. Это представление в виде диагональных матриц подразумевает значительный выигрыш эффективности при вычислении фильтра X в виде обобщенной инверсии (PB)+. В действительности, благодаря разреженному представлению матрицы PB, является возможным усилить фактор M2 в вычислении (PB)+, которое может выполняться, например, при помощи сингулярного разложения значений. Здесь M обозначает число пикселей детектора в каждом ряду. Это понимание сути настоящего изобретения дает возможность для более быстрой реконструкции изображений.
На Фиг. 8 дается графическое описание этой операции свертки для случая планарного детектора и прямой линии для позиций источников, которая также может описываться, как двухмерная задача.
Помимо всего прочего, разреженное представление PB приводит к разреженному представлению (PB)+. Это обеспечивает то, что фильтрация данных проекций, описанных при помощи (PB)+p, с p измеренными данными проекций, может выполняться эффективно. На этом этапе разреженное представление (PB)+ позволяет сохранить фактор M в числовой сложности. Это сохраняет существенное время.
На основании вышеизложенного преимущественный примерный вариант осуществления изобретения определяет то, что данные p получаются после перемещения излучающего источника по траектории с постоянной высотой над детектором, и каждый элемент PiBj из (PB)+ описан как свертка, по меньшей мере, двух математических функций.
В соответствии с другим примерным вариантом осуществления изобретения данные p проекций описывают диапазон углов, покрываемый томографией с ограниченным углом обзора объекта. Упомянутая томография с ограниченным углом обзора объекта представляет собой процесс, с помощью которого используемые данные p были сгенерированы. Помимо всего прочего, диапазон углов, покрываемый томографией с ограниченным углом обзора объекта, является меньше, чем 180 градусов.
Этот вариант осуществления представляет способ томографии с ограниченным углом обзора объекта. Из-за нескольких причин объект O, который должен анализироваться при помощи томографии, может облучаться только электромагнитной радиацией от источника из диапазона углов меньшего, чем 180 градусов. В таком случае представленный способ убедительно реализует описанные выше и ниже преимущества.
В соответствии с другим примерным вариантом осуществления изобретения способ содержит этап выполнения томографии с ограниченным углом обзора объекта для генерирования данных p проекций, причем на этом этапе содержит следующие дополнительные этапы; обеспечение излучающего источника и соответствующего детектора, причем детектор определяет плоскость обнаружения. Содержится дополнительный этап перемещения излучающего источника по отношению к детектору, причем источник перемещается в пределах плоскости, которая является перпендикулярной к плоскости обнаружения. Помимо всего прочего, этап обнаружения сигналов проекций при помощи детектора, благодаря чему генерируются данные p проекций, выполняется при помощи представленного варианта осуществления.
Другими словами, полный процесс томографии с ограниченным углом обзора объекта представляется этим примерным вариантом осуществления настоящего изобретения. Помимо всего прочего, обеспечивается томография с ограниченным углом обзора объекта в комбинации с отфильтрованной обратной проекцией в соответствии с настоящим изобретением. Если требуется, то только специальная область интереса может реконструироваться при помощи настоящего изобретения. Вследствие этого, является возможной ускоренная и укороченная томография с ограниченным углом обзора объекта по отношению только к специальной области интереса объекта. Такая реконструкция области интереса для томографии с ограниченным углом обзора объекта будет описываться позже в настоящем описании более подробно. Коротко говоря, этот вариант осуществления обеспечивает быстрый способ для отфильтрованной обратной проекции, который имеет возможность обрабатывать неполные данные p проекций, сгенерированные при помощи томографии с ограниченным углом обзора объекта, результатом чего является качество изображения, сравнимое с тем, которое получено сложными итерационными способами, причем настоящее изобретение допускает реконструкцию области интереса.
В соответствии с другим примерным вариантом осуществления изобретения геометрические данные d описывают, по меньшей мере, траекторию излучающего источника томографии с ограниченным углом обзора объекта. Если требуется, то траектория источника по отношению к излучающему детектору описывается при помощи геометрических данных d. В настоящем описании траектория источника, описанная в геометрических данных d, может лежать в пределах плоскости, которая является перпендикулярной к плоскости детектора, используемого в томографии с ограниченным углом обзора объекта. Если требуется, то упомянутая плоскость, перпендикулярная к плоскости детектора, может простираться через ряды или столбцы элемента детектора.
В соответствии с другим примерным вариантом осуществления изобретения, способ дополнительно содержит этап регуляризации данных p проекций.
Поскольку предоставленные данные p проекций могут содержать ошибки из-за нескольких причин, этап регуляризации может обеспечиваться, если требуется, при помощи пользователя. Помимо всего прочего, этап регуляризации может привести к сопоставимости результатов представленного способа, т.е. качества реконструированного изображения объекта O, по отношению к результатам известного уровня техники, подобного, например, известной SART. Например, может определяться, сколько итерационных этапов n итерации SART известного уровня техники может потребоваться для обеспечения результатов по отображениям хорошего качества. Это может рассматриваться как этап регуляризации в пределах способа SART известного уровня техники.
В противоположность упомянутой реконструкции по SART известного уровня техники, настоящему изобретению не требуется нескольких итерационных этапов. Применение фильтрующего оператора X к данным p проекций, как и формирование обратной проекции с оператором B обратной проекции, требует только одной итерации и, таким образом, обеспечивает непосредственное решение лежащей в основе математической задачи. Другими словами, настоящее изобретение обеспечивает непосредственный и не итерационный путь осуществления реконструкции изображения при помощи уникального и эффективного фильтрующего оператора X.
В соответствии с другим примерным вариантом осуществления изобретения, способ содержит этап установления границ оператора B обратной проекции на желаемую область интереса. Это может осуществляться, например, пользователем или может осуществляться, например, автоматическим образом программным элементом или, например, компьютером. Помимо всего прочего, этап вычисления обратной проекции выполняется с ограниченным оператором обратной проекции. Другими словами, отфильтрованные проекции обратно проецируются только в желаемом объеме реконструкции.
Другими словами, этот представленный вариант осуществления изобретения предоставляет возможность реконструкции области интереса в томографии с ограниченным углом обзора объекта. Требуются низкие вычислительные затраты, и качество сгенерированного изображения, т.е. реконструированного изображения объекта O, является эквивалентным результатам известных итерационных способов реконструкции. Следовательно, настоящий примерный вариант осуществления реализует, с одной стороны, преимущество способа отфильтрованной обратной проекции, возможность реконструировать только область интереса объекта и, с другой стороны, преимущество способов реконструкции итерационным образом, т.е. обеспечение хорошее качество реконструкции изображения.
Такой вариант осуществления можно увидеть на Фиг. 5. Он обеспечивает быструю реконструкцию изображения и обеспечивает преимущества реконструкции FBP, а именно размер воксела и зона обзора (FOV) для реконструкции и ROI могут выбираться произвольным образом пользователем. Основные вычислительные затраты могут лежать на этапе обратного проецирования, который требуется исполнить только единожды для ROI. Это в противоположность итерационной реконструкции, подобной SART известного уровня техники, где обратная проекция и проекция должны выполняться на каждой итерации для полной FOV и ROI.
Другими словами, представленный вариант осуществления изобретения обеспечивает более быструю реконструкцию изображения, чем итерационная реконструкция, и он одновременно создает эквивалентное качество изображения.
В соответствии с другим примерным вариантом осуществления изобретения, способ дополнительно содержит этап установления границ данных p проекций на ограниченный ввод для фильтрующего оператора X.
Таким образом, представленный вариант осуществления обеспечивает выборочную обратную проекцию.
В соответствии с другим примерным вариантом осуществления изобретения, способ дополнительно содержит этап выполнения дополнения нулями.
Больше подробностей об упомянутом дополнении нулями можно почерпнуть из Главы 3 книги A. Kak и M. Slaney, Принципы компьютеризированной томографии, IEEE Press, Нью Йорк, США, 1999.
В соответствии с другим примерным вариантом осуществления изобретения, способ дополнительно содержит этап продолжения проекций набора p данных, каковые проекции были обрезаны в течение генерирования набора p данных.
Дополнительные подробности об упомянутом этапе продолжения проекций можно найти в LEWITT R., «Обработка неполных данных измерений в компьютерной томографии», Med. Phys., vol. 6, n°5, стр. 412-417, 1979.
В соответствии с другим примерным вариантом осуществления изобретения, представляется вычислительное устройство для реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта. Вычислительное устройство содержит блок вычисления, выполненный с возможностью вычислять фильтрующий оператор X, причем блок вычисления является выполненным с возможностью вычислять фильтрующий оператор Xp после применения фильтрующего оператора X к данным p проекций томографии с ограниченным углом обзора объекта так, что Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Помимо всего прочего, блок вычисления является выполненным с возможностью вычислять обратную проекцию B(Xp) данных Xp отфильтрованных проекций для генерирования реконструированного изображения объекта O.
Вычислительное устройство может реализовываться при помощи компьютера или процессора. Вычислительное устройство может представлять собой отдельный физический элемент может являться интегрированным, например, в томографию, подобную, например, CT или маммографическому устройству для груди. Например, вычислительное устройство может являться частью томографа, который выполняет томографию с ограниченным углом обзора объекта, так что томограф выигрывает от представленных выше и ниже преимуществ настоящего изобретения. Помимо всего прочего, блок вычисления может реализовываться, например, в виде процессора в компьютере или в томографе. В качестве примера следует отметить, что, например, для томографические системы с C-образной дугой, традиционные CT, устройства с переменной траекторией, томографические устройства, выполняющие томосинтез, и устройства, применяющие томосинтез для применения RAD, могут рассматриваться как устройства вычисления, которые извлекают пользу из настоящего изобретения. Следовательно, вышеупомянутые устройства могут являться оборудованными блоком вычисления, как это определено в пределах представленного примерного варианта осуществления изобретения.
В соответствии с другим примерным вариантом осуществления изобретения, представляется машиночитаемый носитель, на котором сохранена компьютерная программа для реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, каковая компьютерная программа, будучи исполняемой процессором, является выполненной с возможностью выполнять получение данных p проекций объекта O, причем данные p проекций описывают N проекций объекта O, каковые N проекций были сгенерированы с конкретной томографической геометрией томографии с ограниченным углом обзора объекта. Применение фильтрующего оператора X к данным p проекций для генерирования данных Xp отфильтрованных проекций, причем Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p, и вычисление обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) представляют собой дополнительные этапы, которые выполняются, как определено выше.
Другими словами, после этапа применения X к p все N проекций данных p являются отфильтрованными и объединенными для генерирования данных Xp отфильтрованных проекций.
В соответствии с другим примерным вариантом осуществления изобретения, представляется программный элемент для реконструкции изображения для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, каковой элемент, будучи исполняемым при помощи процессора, является выполненным с возможностью выполнять прием данных p проекций объекта O, причем данные p проекций описывают проекции объекта O, каковые проекции были сгенерированы с конкретной томографической геометрией томографии с ограниченным углом обзора объекта. Применение фильтрующего оператора X к данным p проекций для генерирования данных Xp отфильтрованных проекций, причем Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p, и вычисление обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) представляют собой дополнительные этапы, которые выполняются, как определено выше.
Другими словами, данные Xp отфильтрованных проекций описывают N отфильтрованных проекций. Каждая из этих отфильтрованных проекций вычисляется из всех проекций набора p данных томографии с ограниченным углом обзора объекта при помощи применения фильтра X к каждой из этих проекций перед тем, как объединять их с каждой отфильтрованной проекцией. Таким путем каждая отфильтрованная проекция зависит от всех других проекций, которые были получены как часть этого набора данных проекций томографии с ограниченным углом обзора объекта.
Другими словами, после этапа применения X к P все N проекций данных p являются отфильтрованными и объединенными для генерирования данных Xp отфильтрованных проекций.
Компьютерный программный элемент компьютерной программы может являться частью компьютерной программы, но он также сам по себе может представлять собой самостоятельную программу. Например, компьютерный программный элемент может использоваться для обновления уже существующей компьютерной программы для того, чтобы приступить к настоящему изобретению.
Представленные выше признаки и другие признаки изобретения станут очевидными и разъясненными со ссылкой на варианты осуществления, описанные в дальнейшем в настоящем описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерные варианты осуществления изобретения будут описаны в следующих чертежах. По существу, идентичные части снабжены одинаковыми ссылочными обозначениями на фигурах.
На Фиг. 1-5 схематически показаны различные блок-схемы различных способов в соответствии с различными примерными вариантами осуществления настоящего изобретения.
На Фиг. 6 схематически показан блок вычисления в соответствии с другим примерным вариантом осуществления настоящего изобретения.
На Фиг. 7 схематически показана томография с ограниченным углом обзора объекта в соответствии с другим примерным вариантом осуществления настоящего изобретения.
На Фиг. 8 схематически показано воздействие обратной проекции и оператора проекции для позиций i и j источника для случая объекта с ограниченной высотой в двухмерной задаче реконструкции.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 показаны этапы метода с S1 по S3 и, следовательно, описывает способ реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта в соответствии с примерным вариантом осуществления настоящего изобретения. В качестве первого этапа обеспечиваются данные p проекций объекта O в пределах этапа S1. Данные p проекций описывают N проекций объекта O, каковые N проекций были сгенерированы с конкретной пространственной томографической геометрией в течение выполнения томографии с ограниченным углом обзора объекта. В настоящем описании N является целым, подобным, например, 1, 2, 3, 4 и т.д. Применение фильтрующего оператора X к данным p проекций для генерирования данных Xp отфильтрованных проекций выполняется в пределах этапа S2, причем Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Вслед за этим вычисление обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) показано на Фиг. 1 в S3. Например, фильтрующий оператор X может реализоваться в виде оператора (PB)+ обобщенной инверсии или в виде уточненного оператора (PB)+ обобщенной инверсии, как описано выше.
Данные Xp отфильтрованных проекций описывают N отфильтрованных проекций. Каждая из этих отфильтрованных проекций вычисляется из всех проекций набора p данных томографии с ограниченным углом обзора объекта при помощи применения фильтра X к каждой из этих проекций перед объединением их с каждой отфильтрованной проекцией. Таким образом, каждая отфильтрованная проекция зависит от всех других проекций, которые были получены как часть этого набора данных проекций томографии с ограниченным углом обзора объекта.
В случае, если в состав не входят аппроксимации, то фильтрующий оператор X может определяться чисто математическим образом при помощи конкретной пространственной геометрии томографии, с которой данные p проекций были сгенерированы. Однако, если требуется, настоящее изобретение также может включать в себя аппроксимации, подобные этапам регуляризации, как описано выше и в дальнейшем в настоящем описании.
Таким образом, эвристические определения X обходятся при помощи настоящего изобретения. Вариант осуществления фильтрующего оператора X предоставляет возможность получения изображения f, которое согласуется со всеми данными p проекций, т.е. изображение f удовлетворяет уравнению Pf=p. Это показывается в нижеследующем. X может реализовываться в виде (PB)+.
Сначала, для этой цели определяется обобщенная инверсия, также известная как псевдоинверсия Мура-Пенроуза. Для линейного оператора P, оператор P+ обобщенной инверсии может определяться как оператор, присваивающий любому p решение f+ с минимальной нормой линейного уравнения Pf=p с неизвестным f. Решение с минимальной нормой определяется как единственное решение с минимальной нормой упомянутого уравнения. Следовательно, в случае, когда p обозначает измеренные данные проекций, можно сказать, что решение f+=P+p с минимальной нормой согласуется с данными p проекций. Теперь обобщенную инверсию P+ можно переписать в виде P+=B(PB)+. Это равенство является результатом свойства оператора обобщенной инверсии и того факта, что B является сопряженным P, как объяснено ниже. Следовательно, решение с минимальной нормой для Pf=p для измеренных данных p проекций задается при помощи f+=P+p=B(PB)+p. Это показывает, что изображение, реконструированное в соответствии с выражением B(Xp), согласуется с измеренными данными p проекций, если фильтрующий оператор X реализуется в виде (PB)+.
Оператор P проекции в виде, используем выше и ниже, может определяться при помощи линейных интегралов по функции O объекта. Более конкретно, P состоит из операторов P1, P2, …, PN, с N, обозначающим число полученных проекций. Каждое Pi описывает всего одну проекцию функции O объекта и определяется линейными интегралами по функции O объекта. Тогда в векторном обозначении P можно записать в виде P=(P1, P2, … PN)t. Тогда оператор B обратной проекции в виде, используемом выше и ниже, определяется единственным образом, как сопряженный оператор к P. В векторном обозначении он может определяться в виде B=(B1, B2, … BN), где для каждого i Bi является сопряженным к Pi.
Вследствие этого, способ фиг. 1 может рассматриваться как способ выполнения томографии с ограниченным углом обзора объекта и объединения ее с эффективным новым вариантом специальной отфильтрованной обратной проекции с фильтрующим оператором X=(PB)+. Если требуется, то этап измерения диапазона углов томографии с ограниченным углом обзора объекта, использующейся для генерирования данных p, может выполняться при помощи настоящего изобретения. Фильтрующий оператор X может вычисляться полностью математическим образом на основе измеренного диапазона углов.
Другими словами, представленный способ с Фиг. 1 добивается того, что реконструированное изображение находится в соответствии с данными p проекций, хотя данные p проекций происходят из томографии с ограниченным углом обзора объекта, и поэтому могут рассматриваться как неполные. Из-за нескольких причин, томографическое устройство может не перемещаться по кругу на 180 градусов по отношению к объекту. Например, такое устройство может только перемещаться ограниченным образом. Дополнительно, очень низкая доза, например, радиации, будет применяться в такой процедуре. Таким образом, в течение томографии с ограниченным углом обзора объекта это может привести к неполным данным проекций, в смысле к проекциям объекта, не описывающим его на все 180 градусов. Способ с фиг. 1 преодолевает упомянутые недостатки, поскольку отфильтрованная обратная проекция в соответствии с настоящим изобретением может использоваться с неполными данными p.
Если требуется, то источник процесса томографии с ограниченным углом обзора объекта перемещается над зафиксированным детектором вдоль или рядом, или столбцов детектора в соответствии со способом Фиг. 1. В этом и любом другом примерном варианте осуществления изобретения перемещение излучающего источника по отношению к детектору может осуществляться по прямой линии и также может являться круговым. Таким образом, в представленном способе извлекают выгоду из специальной пространственной геометрии томографии, которая создает возможность для удовлетворительного вычисления решения высокого качества в виде реконструированного изображения высокого качества.
Вследствие этого, используемый фильтрующий оператор X настоящего изобретения имеет непосредственную и хорошо определенную зависимость относительно пространственной геометрии, с которой данные p проекций были записаны. Представленный способ не определяет фильтрующий оператор X итерационным образом, но непосредственно определяет фильтрующий оператор X. Помимо всего прочего, настоящее изобретение не определяет решение лежащей в основе математической задачи итерационным образом, но определяет решение, т.е. реконструированное изображение высокого качества, непосредственно.
Причиной предоставленной возможности высокой скорости вычисления настоящего изобретения является, в том числе, понимание сути вышеописанной и нижеописанной специальной геометрии томографии, использованной в пределах томографии с ограниченным углом обзора объекта. Эта геометрия может рассматриваться как перпендикулярная геометрия. Для вычисления фильтрующего оператора X может определяться составной оператор PB. Составной оператор может определяться в пространстве или сразу в частотном пространстве. Помимо всего прочего, может генерироваться обобщенная инверсия (PB)+ упомянутого составного оператора PB, которая приравнивается X. Это может рассматриваться как фильтрующий оператор (PB)+, который применяется к неполным данным p, созданным в течение томографии с ограниченным углом обзора объекта. В случае, если излучающий источник перемещается в пределах плоскости, которая является перпендикулярной плоскости, определенной детектором, настоящее изобретение выигрывает от возможного эффективного математического определения (PB)+.
Способ с Фиг. 1 может рассматриваться как способ томографии с ограниченным углом обзора объекта. При помощи представленных этапов с S1 по S3 обеспечивается решение f для уравнения P(f)=p, как определено представленным вариантом осуществления изобретения. Решение f в виде, обеспеченном представленным вариантом осуществления, может рассматриваться как реконструированное изображение B(Xp) объекта O. Как будет определено позже и как было определено выше, фильтрующий оператор X может, например, реализовываться в виде (PB)+. Однако, являются возможными другие фильтрующие операторы X, которые зависят от геометрии томографии с ограниченным углом обзора объекта, т.е. обратной проекции и/или покрываемого диапазона углов процесса томографии. Но эвристические определения X избегаются при помощи настоящего изобретения.
Фиг. 2 описывает блок-схему способа, которая в дополнение к Фиг. 1 содержит дополнительные этапы S4 и S5 способа. Преимущества и объяснения S1-S3 можно приобрести из представленного выше описания Фиг. 1. Этап S4 описывает снабжение геометрическими данными d, описывающими конкретную пространственную геометрию томографии, использованную для генерирования данных p проекций. Например, геометрические данные d могут содержать число N проекций, которые генерируются в течение выполнения томографии с ограниченным углом обзора объекта. Дополнительно или альтернативно, геометрические данные d могут содержать величину диапазона углов, который покрывается выполненной прежде томографией с ограниченным углом обзора объекта, при помощи которой были сгенерированы данные p. Помимо всего прочего, другие параметры, описывающие конкретную геометрию томографии, могут входить в состав данных d, если требуется.
На основе предоставленных геометрических данных d математическим образом вычисляется фильтрующий оператор X=(PB)+. Это показано на этапе S5. Другими словами, фильтрующий оператор X чисто математическим образом определяется при помощи пространственной геометрии, которая использовалась в течение томографии с ограниченным углом обзора объекта для того, чтобы выработать данные p проекций. Вследствие этого, эвристические определения X избегаются при помощи настоящего изобретения. Фильтрующий оператор X, который генерируется и вычисляется так, как описано выше, применяется в течение этапа S2 с данными p проекций, как уже описано по отношению к Фиг. 1. Дополнительно, вычисление обратной проекции, как определено на этапе S3 Фиг. 1, аналогичным образом выполняется на Фиг. 2 с фильтрующим оператором X=(PB)+. Если требуется, то этап измерения диапазона углов томографа с ограниченным углом обзора объекта для генерирования данных p может выполняться при помощи настоящего изобретения.
На Фиг. 3 показан другой примерный вариант осуществления способа реконструкции изображения для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта с X=(PB)+. Как описано ранее, этап S1 описывает обеспечение данных p проекций объекта O, которые предварительно были проанализированы томографией с ограниченным углом обзора объекта. Помимо всего прочего, геометрические данные d были записаны в течение выполнения томографии с ограниченным углом обзора объекта, каковые геометрические данные d обеспечиваются в течение этапа S4. Если требуется, то измерение диапазона угла томографии с ограниченным углом обзора объекта, использующейся для генерирования данных p, может выполняться при помощи настоящего изобретения. Вычислительное устройство или блок вычисления может выполнять вычисление оператора P проекций в пределах этапа S6. Вслед за этим или, если требуется, одновременно на этапе S7 вычисляется оператор B обратной проекции. Вслед за этим или, если требуется, одновременно на этапе S8 вычисляется и/или генерируется составной оператор PB. Помимо всего прочего, на этапе S9 генерируется оператор (PB)+ обобщенной инверсии, причем оператор (PB)+ обобщенной инверсии используется в качестве фильтрующего оператора X, как описано в настоящем описании. Подробности генерирования (PB)+ были описаны выше. Помимо всего прочего, составной оператор (PB)+ обобщенной инверсии применяется в качестве фильтрующего оператора к данным p проекций для создания данных (PB)+p отфильтрованных проекций в пределах этапа S10. Вслед за этим, может выполняться этап обратной проекции. Это определено, как вычисление обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) на этапе S3. Посредством этого фильтрующий оператор (PB)+ определяется исключительно математическим образом при помощи конкретной пространственной геометрии томографии, с которой были сгенерированы данные р проекций. Таким образом, X основывается на геометрических данных d.
Следует понимать, что в соответствии с настоящим изобретением численное вычисление операторов P и B не является обязательно необходимым. Вычисления являются необходимыми только для определения PB, в особенности для аналога PB в частотном пространстве. Вычисление самого P в явном виде может не являться необходимым для настоящего изобретения. B используется для выполнения обратной проекции в конце способа в соответствии с примерным вариантом осуществления изобретения. Однако, также и для B численное вычисление B не является обязательно необходимым.
Способ на Фиг. 2 гарантирует то, что Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Следовательно, представленный способ обеспечивает более высокую стабильность по отношению к шуму и обеспечивает правильное рассмотрение избыточных данных.
Таким образом, на Фиг. 3 отображена блок-схема способа отфильтрованных обратных проекций, который использует очень специальный фильтрующий оператор X=(PB)+. Представленный способ извлекает выгоду из того обстоятельства, что в томографии с ограниченным углом обзора объекта пространственные траектории излучающего источника по отношению к детектору могут эффективно использоваться. Упомянутая траектория определяется лежащей внутри плоскости, которая является перпендикулярной к плоскости, которая определяется элементами детектора. Эти элементы детектора можно почерпнуть из следующей Фиг. 7. Фильтрующий оператор X, определенный в настоящем изобретении, обеспечивает несколько преимуществ, например, для ускоренной реконструкции изображений, с сопоставимым качеством по сравнению с известными технологиями, подобными, например, реконструкции SART.
Составной оператор PB может содержать, по меньшей мере, одну свертку из двух математических функций. При преобразовании упомянутого составного оператора PB при помощи преобразования Фурье в частотное пространство, преобразованный оператор P проекций содержит несколько перемножений математических функций. Благодаря преобразованию составного оператора PB частотное пространство очень эффективное вычисление требуемого реконструированного изображения обеспечивается при помощи настоящего изобретения. Это будет объяснено в дальнейшем в настоящем описании более подробно. При помощи упомянутого преобразования представление составного оператора B упрощается, и при помощи настоящего изобретения вычислительные затраты на реконструкцию снижаются. Его подробности и преимущества будут описаны и станут более понятными в дальнейшем в настоящем описании.
В контексте настоящего изобретения данные p проекций томографии с ограниченным углом обзора объекта был/были сгенерированы томографией с использованием менее чем 180° в обхвате объекта, например, человеческой груди, которая исследуется при помощи томографии.
На Фиг. 4 показана другая блок-схема способа томографии с ограниченным углом обзора объекта, содержащего отфильтрованную обратную проекцию в соответствии с другим примерным вариантом осуществления настоящего изобретения. Показанный способ предназначен для реконструкции изображения при помощи отфильтрованной обратной проекции. Перед тем как должен выполняться процесс реконструкции, как объяснено выше и ниже, выполняется томография с ограниченным углом обзора объекта для того, чтобы сгенерировать неполные данные p проекций. Термин «неполные данные p» может пониматься в том смысле, что p описывает проекции объекта O вдоль диапазона углов, который является меньшим, чем 180 градусов. Это можно почерпнуть из следующей Фиг. 7.
Помимо всего прочего, на Фиг. 4 показан этап S11, описывающий этап выполнения томография с ограниченным углом обзора объекта для того, чтобы сгенерировать данные p проекций. Как можно видеть на Фиг. 4, этап S11 содержит три этапа с S12 по S14. Этап S12 отображает обеспечение излучающего источника и соответствующего детектора. Детектор определяет плоскость детектора. Помимо всего прочего, этап перемещения излучающего источника по отношению к детектору отображается на Фиг. 4 с S13. Вследствие этого, источник перемещается в плоскости, которая является перпендикулярной к плоскости детектора. Помимо всего прочего, выполняется этап S14, причем S14 описывает обнаружение сигналов проекций при помощи детектора и, вследствие этого, генерирование неполных данных p проекций. Вслед за этим или одновременно, выполняются этапы S1, S4, S5, S2 и S3, описанные ранее по отношению к Фиг. 1 и/или 2.
На Фиг. 5 показана другая блок-схема способа в соответствии с другим примерным вариантом осуществления изобретения. На Фиг. 5 отображен процесс томографии с ограниченным углом обзора объекта в комбинации с отфильтрованной обратной проекцией только специальной области интереса. Таким образом, реконструированной является только область интереса. Следовательно, ускоренная и укороченная томографии с ограниченным углом обзора объекта является возможной по отношению только к специальной области интереса объекта O. Относительно этапов с S1 по S10 делается ссылка на описание Фиг. 3. Вариант осуществления на Фиг. 5 может применять те же самые этапы, которые описаны выше в отношении Фиг. 3. Однако вариант осуществления на Фиг. 5 не выполняет этап S3 после S10, но выполняет этап S16. Этап S16 описывает этапы установления границ оператора B обратной проекции на желаемую область интереса пользователем, причем этап вычисления обратной проекции S3 выполняется с ограниченным оператором обратной проекции. Другими словами, вариант осуществления с Фиг. 5 предоставляет возможность область интереса для реконструкции для томографии с ограниченным углом обзора объекта, тем самым обеспечивая эквивалентные результаты по изображению, сопоставимые с современными способами итерационных построений. Способ реконструкции на Фиг. 5 является быстрым и обеспечивает преимущества реконструкции FBP, а именно размер воксела и зона обзора (FOV) для реконструкции и область интереса (ROI) могут выбираться произвольным образом пользователем. Основные вычислительные затраты могут лежать на этапе обратного проецирования, который требуется исполнить только единожды для ROI. Это в противоположность итерационной реконструкции, подобной SART известного уровня техники, где обратная проекция и проекция должны выполняться на каждой итерации для полной FOV и ROI.
Другими словами, представленный вариант осуществления изобретения обеспечивает более быструю реконструкцию изображения, чем итерационная реконструкция, и он одновременно создает эквивалентное качество изображения. Способ на Фиг. 5 делает реальным то, что Xp описывает N отфильтрованных проекций объекта, и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p. Следовательно, представленный способ обеспечивает более высокую стабильность по отношению к шуму и обеспечивает правильное рассмотрение избыточных данных.
В любом из вышеописанных способов на Фиг. 1-5 следующие этапы могут выполняться дополнительно. Выполнение перемещения излучающего источника по траектории с постоянной высотой над детектором, после перемещения которого генерируются данные p, причем каждый элемент PiBj для X=(PB)+ содержит свертку, по меньшей мере, двух математических функций.
Помимо всего прочего, каждый элемент PiBj для X=(PB)+ может состоять из свертки, по меньшей мере, двух математических функций.
В соответствии еще с другим вариантом осуществления следующие этапы могут содержаться дополнительно: преобразование оператора PB проекций при помощи преобразования Фурье в частотное пространство, причем оператор PB проекций, преобразованный в частотное пространство, содержит несколько перемножений математических функций. Это делает возможным уменьшение во времени вычисления, как описано выше подробным образом.
Помимо всего прочего, оператор PB проекций, преобразованный в частотное пространство, может состоять из нескольких перемножений математических функций.
На Фиг. 6 схематически показано вычислительное устройство 100 для реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта. Вычислительное устройство 100 содержит блок 101 вычисления. Устройство 100 вычисления может реализовываться, например, в виде компьютера или любого томографического устройства как, например, томографическая система с С-образной дугой, традиционная CT, использующая рентгеновское излучение, устройство с переменной траекторией, томографическое устройства, выполняющее томосинтез, и устройство, применяющее томосинтез для применения RAD. Блок 101 вычисления может реализовываться, например, в виде процессора. Помимо всего прочего, блок вычисления, показанный на Фиг. 6, сохраняет программный элемент 104, который является выполненным с возможностью исполнять представленные выше и ниже способы. Блок 101 вычисления может исполнять упомянутые способы. Дополнительно показан дисплей 105 для того, чтобы выводить на экран реконструированное изображение объекта O пользователю. Помимо всего прочего, на Фиг. 6 показан машиночитаемый носитель 102, реализованный в виде накопителя USB. Машиночитаемый носитель 102 также содержит программный элемент 104. Интерфейс 103 содержится в устройстве 100 вычисления. Если требуется, такое устройство вычисления может являться интегрированным устройство медицинской визуализации, подобное томографу, для того, чтобы выполнять требуемую томографию с ограниченным углом обзора объекта и получать выигрыш от преимуществ представленного способа обратной проекции со специальным фильтрующим оператором X, как описано выше и ниже.
Блок вычисления является выполненным с возможностью использовать фильтр X так, что данные Xp отфильтрованных проекций описывают N отфильтрованных проекций. Каждая из этих отфильтрованных проекций вычисляется из всех проекций набора p данных томографии с ограниченным углом обзора объекта при помощи применения фильтра X к каждой из этих проекций перед объединением их в каждую отфильтрованную проекцию. Таким путем каждая отфильтрованная проекция зависит от всех других проекций, которые были получены как часть этого набора данных проекций томографии с ограниченным углом обзора объекта. Следовательно, представленный блок вычисления обеспечивает более высокую стабильность по отношению к шуму и обеспечивает правильное рассмотрение избыточных данных.
На Фиг. 7 показан томограф 703 для выполнения томографии с ограниченным углом обзора объекта.
Ссылочный значок 708 отображает ограниченный диапазон углов, являющийся меньшим, чем 180°, приводящий к неполному набору p данных. Детектор 700 показан выше того объекта 704, который обрабатывается. Детектор 700 содержит несколько детекторных элементов, организованных рядами и столбцами, как это является известным специалисту в данной области технике. Излучающий источник в качестве примера показан в трех различных пространственных позициях 700a, 700b, 700c. Все эти позиции, с которых генерируются проекции объекта 704, располагаются вдоль пространственной линии 702. Однако также другие траектории излучающего источника томографа являются возможными, как описано выше. Испускаемое излучение в качестве примера показано при помощи пунктирных линий 703. Блок 705 вычисления, который является подключенным к детектору 700, показан на Фиг. 7. Блок вычисления может генерировать данные p проекций и также геометрические данные d, как определено в формуле изобретения и как описано выше в отношении Фиг. 1-6. Помимо всего прочего, показан дисплей 706 для того, чтобы отображать на экране реконструированное отображение, например, B(PB)+p, пользователю или сохранять изображение в каком-то месте.
Из-за нескольких причин томографическое устройство может не перемещаться вокруг на 180 градусов по отношению к объекту. Например, такое устройство может перемещаться ограниченным образом. Дополнительно, очень низкая доза, например, рентгеновского излучения, будет применяться в такой процедуре. Однако, в течение томографии с ограниченным углом обзора объекта это может привести к неполным данным проекций, в смысле к проекциям объекта, не описывающим его на все 180 градусов.
Томограф 703 компенсировал упомянутые граничные условия при помощи применения настоящего изобретения, как описано в настоящем описании. Томограф 703 может рассматриваться как томографическая система с С-образной дугой, традиционная CT, использующая рентгеновское излучение, устройство с переменной траекторией, томографическое устройства, выполняющее томосинтез, и устройство, применяющее томосинтез для применения RAD.
Таким образом, сущностью настоящего изобретения является объединение преимуществ известных итерационных способов и известных способов обратных проекций при помощи нового объекта изобретения так, как это определено в независимой формуле изобретения. Настоящее изобретение делает возможным использовать обратную проекцию в томографии с ограниченным углом обзора объекта, несмотря на то, что обеспечиваются только неполные данные проекций, т.е. данные проекций, которые генерируются при выполнении томографии с угла, меньшего, чем 180°, по отношению к объекту. Это можно увидеть на Фиг. 7. Помимо всего прочего, представленный способ предоставляет возможность реконструкции только области интереса и не всей зоны обзора, всего объекта. Дополнительно, представленное изобретение является очень быстрым, и результатом его является реконструированное изображение, которое имеет сопоставимое качество в сравнении с результатами известных итерационных способов. Способ настоящего изобретения не является итерационным. Упомянутые преимущества и характеристики настоящего изобретения станут более понятными и разъясненными из следующего описания.
На Фиг. 8 дается графическое описание операции свертки, уже описанной выше. Это является операцией свертки для случая планарного детектора 800 и прямой линии для позиций источников, которая также может описываться, как двухмерная задача. Оператор Bj обратной проекции 801 проецирует обратно значение из позиции 0 802 по направлению позиции j источника в значение изображения, имея в результате значения изображений вдоль этой линии. Здесь значение является ограниченным высотой над плоскостью детектора, как описано параллельной линией 803 над линией, описывающей детектор 800. Оператор Pi проекции 804 далее проецирует значения изображений вдоль линии около пикселей детектора между 0 и di,j 805 и, таким образом, представляет ограниченную поддержку свертки.
Можно рассматривать как дополнительную сущность изобретения обеспечение для способа вычисления и/или применения фильтров для реконструкции отфильтрованных обратных проекций. Фильтр вычисляется таким образом, что результирующее изображение FBP может сравниваться с изображением SART после n итераций из того же самого набора данных проекций.
Следующие этапы могут вовлекаться в вычисление упомянутых фильтров. Определение геометрии томографии, также называемой геометрией системы, которое может содержать определение числа образов и/или проекций и определение покрываемого диапазона углов, использующегося для сбора данных с ограниченным углом обзора объекта. Если требуется, то могут определяться больше параметров для того, чтобы описать геометрию томографии, используемую для сбора данных с ограниченным углом обзора объекта. Если требуется, то может устанавливаться эквивалентное число итераций для итерационной технологии, подобной, например, реконструкции SART. Следовательно, при помощи представленного способа обеспечивается сопоставимость между результатами изображений настоящего изобретения и результатами изображений соответствующей реконструкции SART.
Помимо всего прочего, может выполняться этап вычисления одного или набора фильтров проекций на основе упомянутой прежде эквивалентности между реконструкцией SART и реконструкцией отфильтрованных обратных проекций. В довершении всего, отфильтрованные проекции могут обратно проецироваться в объем реконструкций.
Другими словами, представленный способ представляет собой общий подход для ускорения известных технологий, подобных, например, реконструкций SART, для независимо полученных геометрий. Для данной геометрии томографии, т.е. геометрии сбора данных, составной оператор PB оператора P проекции и оператор B обратной проекции требуется вычислить только один раз. Это может привести к уменьшению времени, являющегося необходимым для выполнения реконструкции.
Представленный способ обеспечивает преимущество в том, что фильтр, т.е. фильтрующий оператор, подобный, например, X, и составной оператор PB могут вычисляться аналитическим образом и зависят только от геометрии томографии, т.е. геометрии системы. Если требуется, можно сделать фильтры зависимыми от эквивалентного числа итераций SART, как описано выше и в дальнейшем в настоящем описании.
Реконструкция изображения в соответствии с настоящим изобретением является быстрой и обеспечивает преимущества реконструкции FBP, а именно размер воксела и зона обзора (FOV) для реконструкции и область интереса (ROI) могут выбираться произвольным образом пользователем. Основные вычислительные затраты могут лежать на этапе обратного проецирования, который требуется исполнить только единожды для ROI. Это в противоположность итерационным реконструкциям, подобным SART, где обратная проекция и проекция должны выполняться на каждой итерации для полной FOV и ROI. Другими словами, настоящее изобретение обеспечивает более быструю реконструкцию изображений, чем итерационная реконструкция, и оно одновременно создает эквивалентное качество изображения.
Другие вариации раскрытых вариантов осуществления могут пониматься и реализовываться специалистами в данной области техники при осуществлении заявленного изобретения из изучения чертежей, раскрытия и приложенной формулы изобретения. В этой формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и перечисление этапов и элементов в единственном числе не исключает их множества. Единичный процессор или другой блок может исполнять несколько пунктов или этапов, изложенных в формуле изобретения. Простой факт, что определенные средства изложены во взаимозависимых различных пунктах, не означает, что комбинация этих средств не может использоваться успешно. Компьютерная программа может сохраняться/распространяться на подходящем носителе, таком как оптический носитель хранения или полупроводниковый носитель, предоставляемый совместно или как часть аппаратного оборудования, но также может распространяться в других формах, таких как через Интернет или другую проводную или беспроводную телекоммуникационную систему. Любые ссылочные обозначения в формуле изобретения не должны интерпретироваться как ограничивающие объем формулы изобретения.
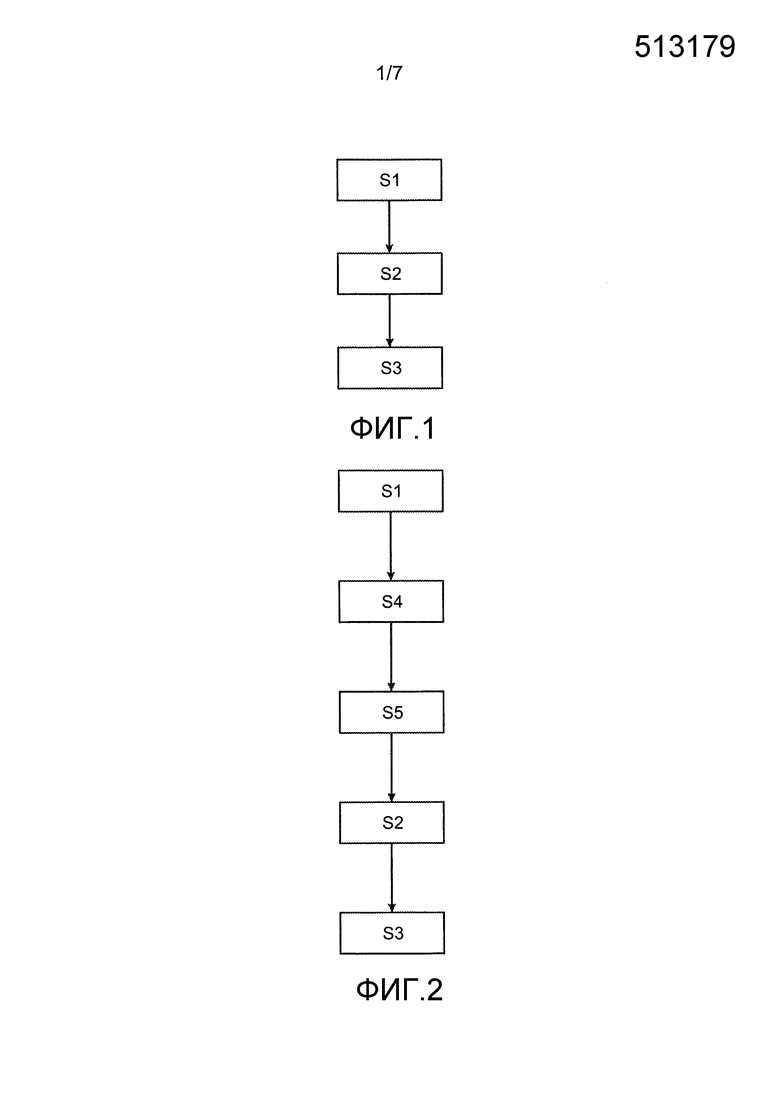
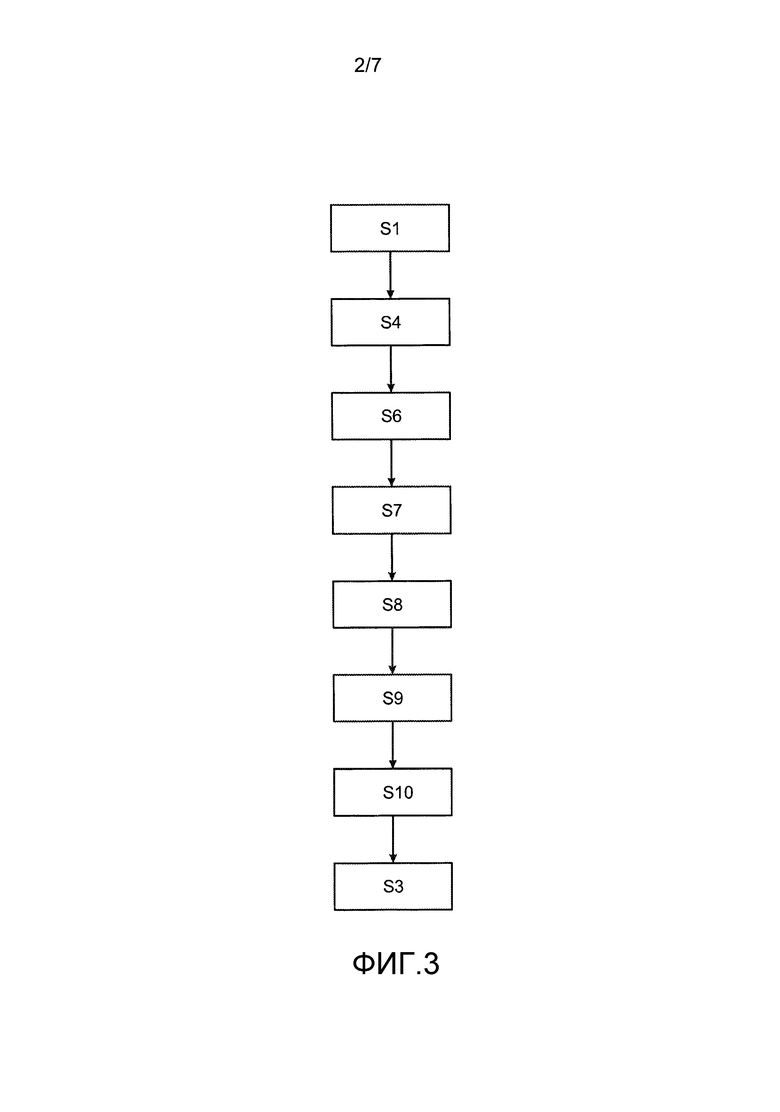
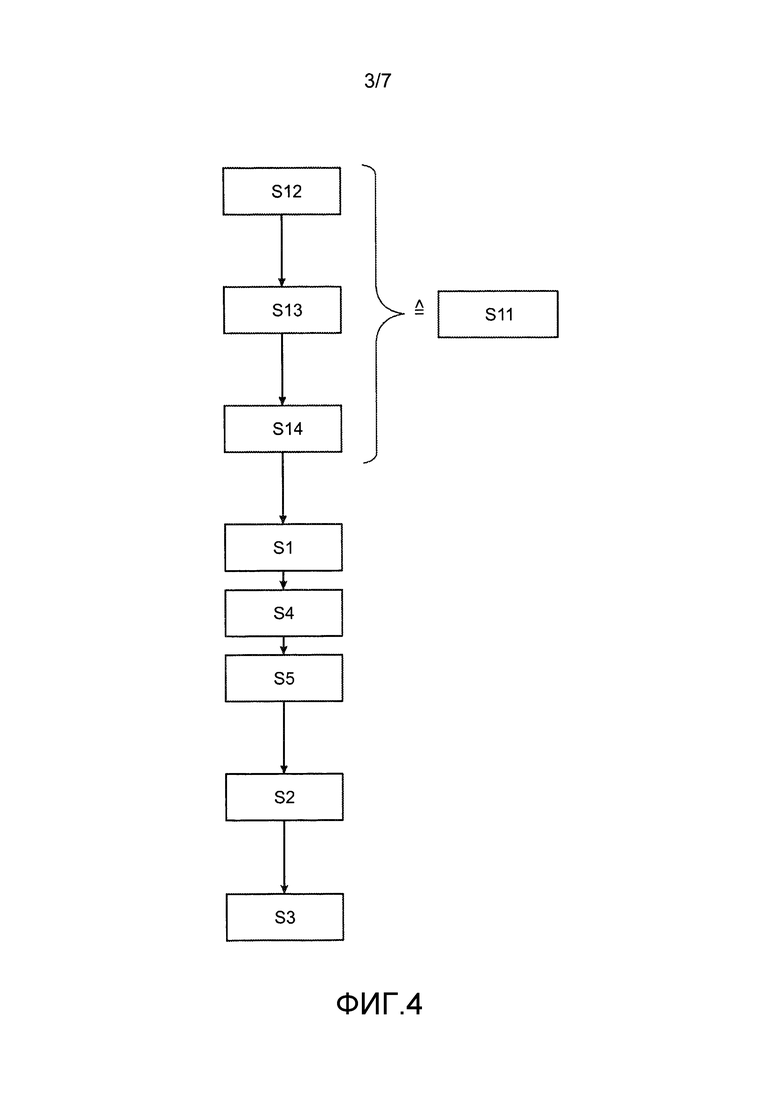
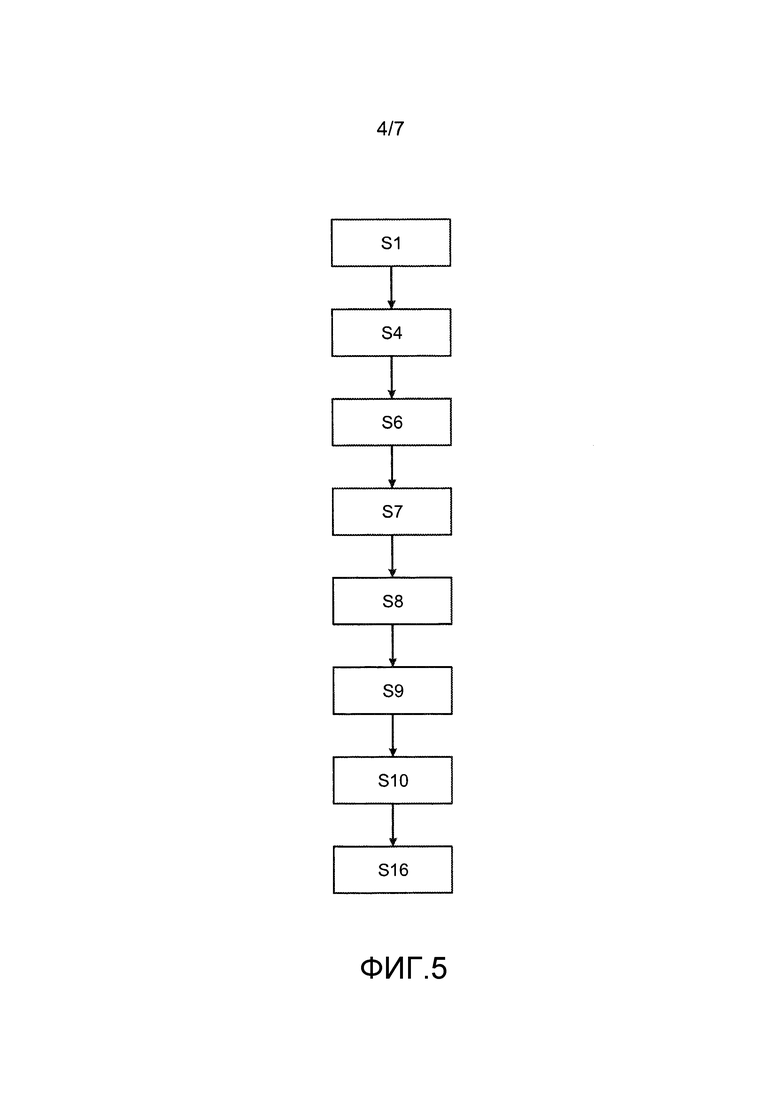
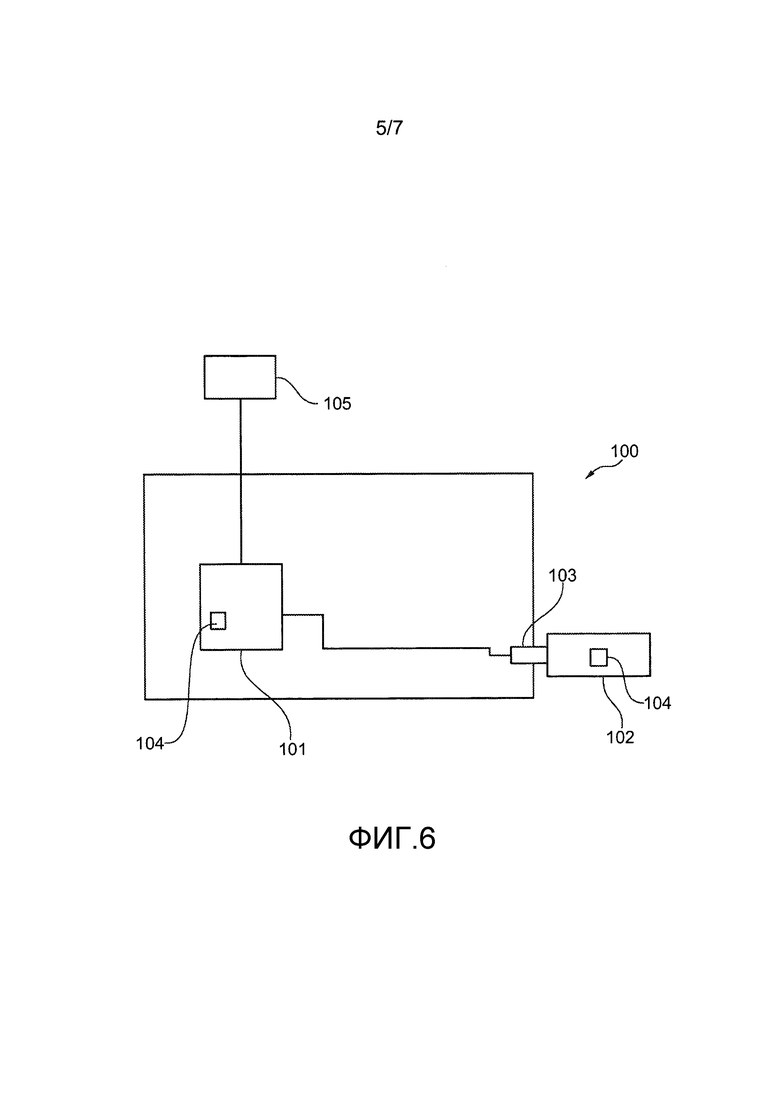
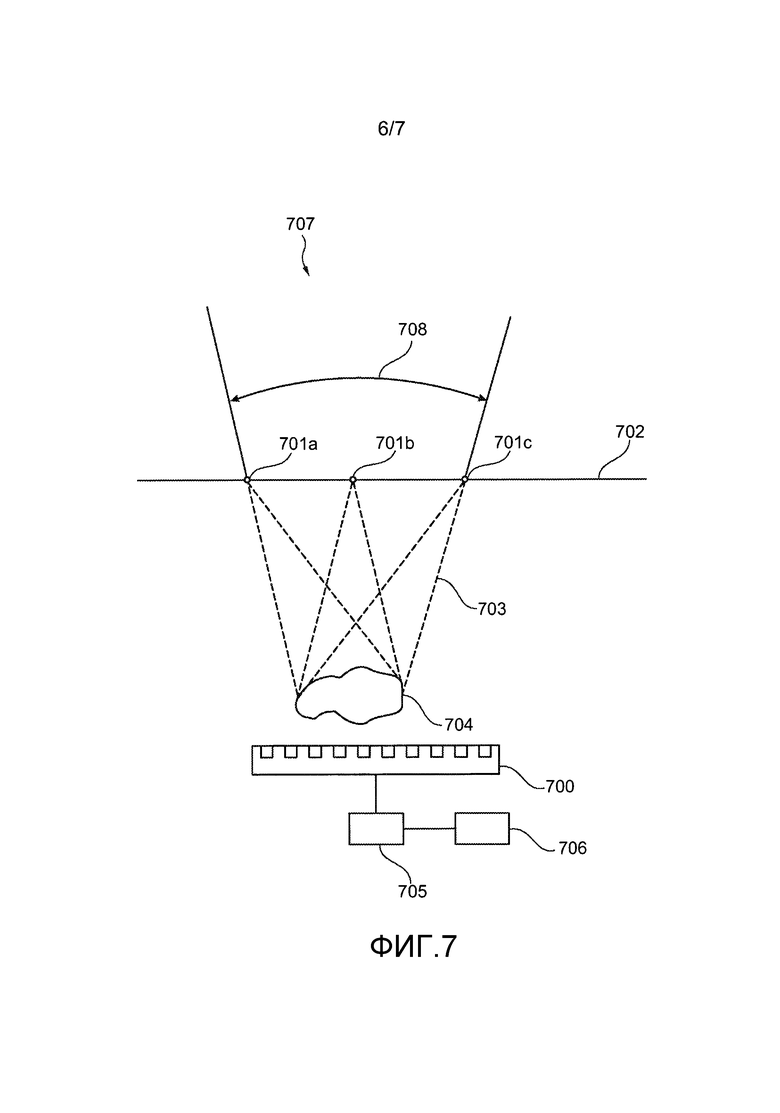
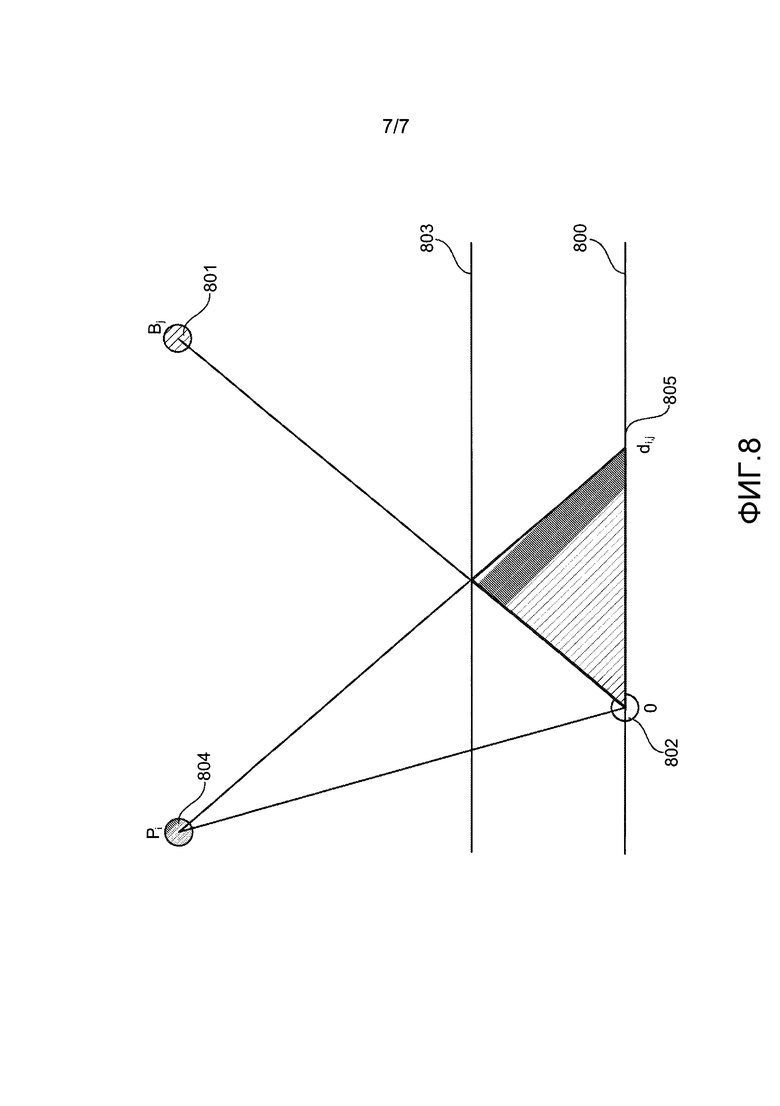
Использование: для томографии с ограниченным углом обзора объекта. Сущность изобретения заключается в том, что получают данные p проекций томографии с ограниченным углом обзора объекта O (S1), причем данные p проекций описывают N проекций объекта O, причем излучающий источник перемещается по отношению к детектору при получении данных p проекций, применяют фильтрующий оператор X к данным p проекций томографии с ограниченным углом обзора объекта для генерирования данных Xp (S2) отфильтрованных проекций, причем Xp описывают N отфильтрованных проекций объекта O и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p, и вычисляют обратную проекцию данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) (S3). Технический результат: обеспечение высокого качества изображений при использовании неполных данных p проекций. 3 н. и 11 з.п. ф-лы, 8 ил.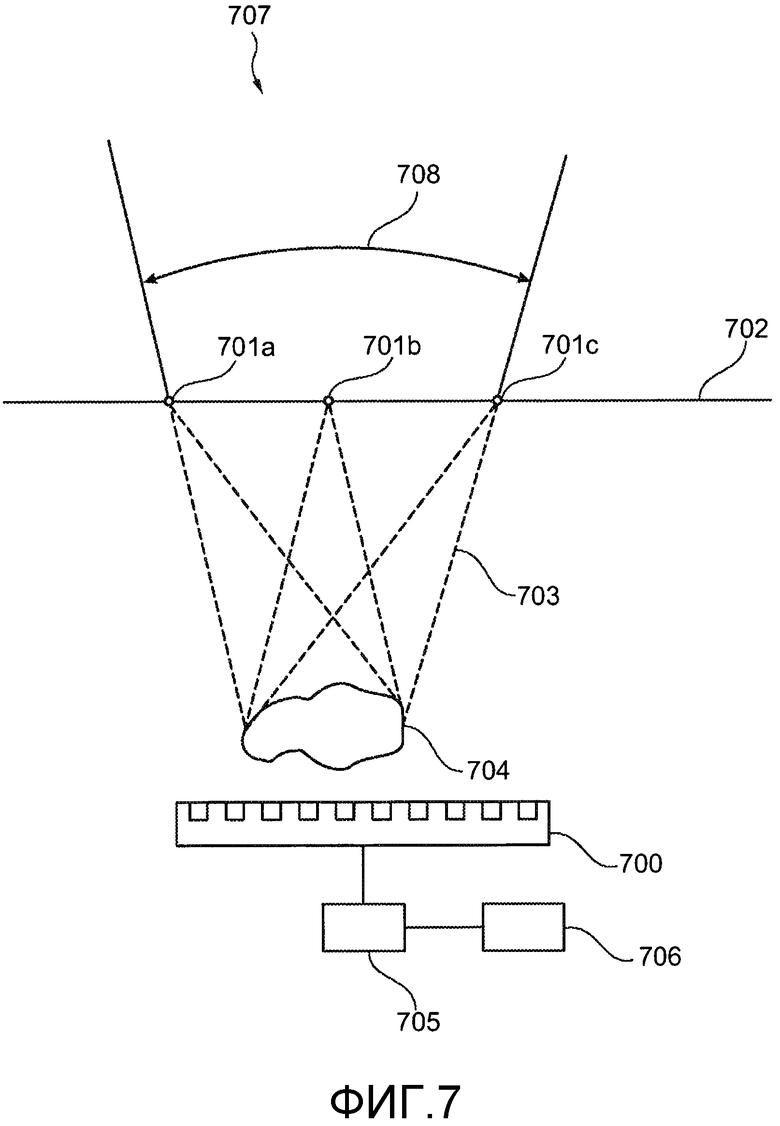
1. Способ реконструкции изображений в томографии с ограниченным углом обзора объекта, причем способ содержит этапы
получения данных p проекций томографии с ограниченным углом обзора объекта O (S1), причем данные p проекций описывают N проекций объекта O, причем излучающий источник перемещается по отношению к детектору при получении данных p проекций,
применения фильтрующего оператора X к данным p проекций томографии с ограниченным углом обзора объекта для генерирования данных Xp (S2) отфильтрованных проекций, причем Xp описывают N отфильтрованных проекций объекта O и причем каждая отфильтрованная проекция вычисляется из всех N проекций данных p, и
вычисления обратной проекции данных Xp отфильтрованных проекций с использованием оператора B обратной проекции для генерирования реконструированного изображения B(Xp) (S3).
2. Способ по п. 1, в котором фильтрующий оператор X реализован в виде оператора (PB)+ обобщенной инверсии
3. Способ по п. 2,
в котором P состоит из операторов P1, P2, … , PN проекций, где N обозначает полный набор проекций, описанных данными p,
в котором P представляется в векторной форме в виде P=(P1, P2, … , PN)t,
в котором B состоит из операторов B1, B2, … , BN обратных проекций, и
в котором B представляется в векторной форме в виде
B=(B1, B2, … , BN), где для каждого i Bi является сопряженным к Pi.
4. Способ по п. 1, дополнительно содержащий этапы
выполнения преобразования Фурье в отношении данных p проекций вдоль траектории излучающего источника, причем траектории использовалась для генерирования данных p проекций,
умножения значений всех N проекций, касающихся частотного компонента k, на фильтрующий оператор X для формирования умноженных данных Xk и
выполнения обратного преобразования Фурье в отношении умноженных данных Xk.
5. Способ по п. 2, дополнительно содержащий этапы
обеспечения геометрических данных d, описывающих геометрию томографии с ограниченным углом обзора объекта, используемую для генерирования данных p (S4) проекций томографии с ограниченным углом обзора объекта, и
вычисления фильтрующего оператора X=(PB)+ полностью на основе геометрических данных d (S5).
6. Способ по п. 2, в котором данные p получаются после перемещения излучающего источника по траектории с постоянной высотой над детектором и
в котором каждый элемент PiBj содержит свертку, по меньшей мере, двух математических функций.
7. Способ по п. 2, дополнительно содержащий этап
преобразования оператора PB проекций при помощи преобразования Фурье в частотное пространство и
в котором оператор PB проекций, преобразованный в частотное пространство, содержит несколько перемножений математических функций.
8. Способ по п. 1, в котором данные p проекций томографии с ограниченным углом обзора объекта описывают диапазон углов, покрываемый томографией с ограниченным углом обзора объекта, и
в котором диапазон углов, покрываемый томографией с ограниченным углом обзора объекта, меньше чем 180°.
9. Способ по п. 1, дополнительно содержащий этапы
выполнения томографии с ограниченным углом обзора объекта для генерирования данных p (S11) проекций томографии с ограниченным углом обзора объекта, причем этап S11 содержит этапы
обеспечения излучающего источника и соответствующего детектора (S12), причем детектор определяет плоскость обнаружения,
причем источник перемещается в пределах плоскости, которая является перпендикулярной к плоскости обнаружения, и
обнаружения сигналов проекций при помощи детектора, после обнаружения которых генерируются (S14) данные p проекций томографии с ограниченным углом обзора объекта.
10. Способ по п. 5, в котором геометрические данные d описывают, по меньшей мере, траекторию излучающего источника томографии с ограниченным углом обзора объекта и
в котором траектория источника, описанная в геометрических данных d, полностью лежит в пределах плоскости, которая является перпендикулярной к плоскости детектора, использованного в томографии с ограниченным углом обзора объекта.
11. Способ по п. 1, дополнительно содержащий этап
определения оператора B обратной проекции, ограниченного пользователем до желаемой области интереса (S16), и
в котором этап вычисления обратной проекции (S3) выполняется с ограниченным оператором обратной проекции.
12. Вычислительное устройство (100) для реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, причем вычислительное устройство содержит
блок (101) вычисления, выполненный с возможностью вычислять фильтрующий оператор X,
причем блок вычисления выполнен с возможностью получать данные p проекций томографии с ограниченным углом обзора объекта O, причем излучающий источник перемещается по отношению к детектору при получении данных p проекций,
причем блок вычисления выполнен с возможностью вычислять данные Xp отфильтрованных проекций, применяя фильтрующий оператор X к полученным данным p проекций томографии с ограниченным углом обзора объекта таким образом, что Xp описывает N отфильтрованных проекций объекта O, и таким образом, что каждая отфильтрованная проекция вычисляется из всех N проекций данных p,
причем блок вычисления выполнен с возможностью вычислять обратную проекцию B(Xp) данных Xp отфильтрованных проекций для генерирования реконструированного изображения объекта O.
13. Вычислительное устройство по п. 12,
причем вычислительное устройство реализовано в виде устройства медицинской визуализации.
14. Машиночитаемый носитель, на котором хранится программный элемент для реконструкции изображений для отфильтрованной обратной проекции в томографии с ограниченным углом обзора объекта, причем программный элемент, будучи исполняемым процессором, выполнен с возможностью осуществлять способ по любому одному из пп. 1-11.
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2343458C2 |
| US 2007036418A1, 15.02.2007 | |||
| WO 2005076038A1, 18.08.2005 | |||
| US 20100054565A1, 04.03.2010 | |||
| СИСТЕМА И СПОСОБ ДЛЯ РЕКОНСТРУИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОСРЕДСТВОМ СКАНИРОВАНИЯ ПО ПРЯМОЛИНЕЙНОЙ ТРАЕКТОРИИ | 2006 |
|
RU2334973C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |

