Изобретение относится к оптико-электронным приборам (ОЭП) наземных и воздушных робототехнических комплексов (РТК) обнаружения (определения пространственного положения) и распознавания объектов на основе стереоэффекта цифровыми методами.
В настоящее время определение пространственного положения объектов в плоскости (по азимутальному и вертикальному углам) широко используются в пассивных системах головок самонаведения управляемых боеприпасов, в системах наблюдения (веб-камеры, тепловизоры и др.) на базе матриц приборов зарядовой связи (ПЗС), в монокулярных оптико-электронных приборах наземных и воздушных робототехнических комплексов.
Распознавание объекта штатными монокулярными ОЭП производится в плоскости, что может привести к неоднозначности оценки о характере объекта (например, легко спутать реальный танк с плоским щитом). Кроме того, данные системы не позволяют измерять дальность до объекта пассивным (скрытым) методом, т.е. определить трех координатное положение объекта и распознать его.
Дешевые одноразовые автономные робототехнические комплексы с монокулярными ОЭП, способны самостоятельно выполнять различные боевые задачи (разведка, поражение, обеспечение). Они входят в состав так называемых «стаи» или «автономного роя роботов» [1,2, 3].
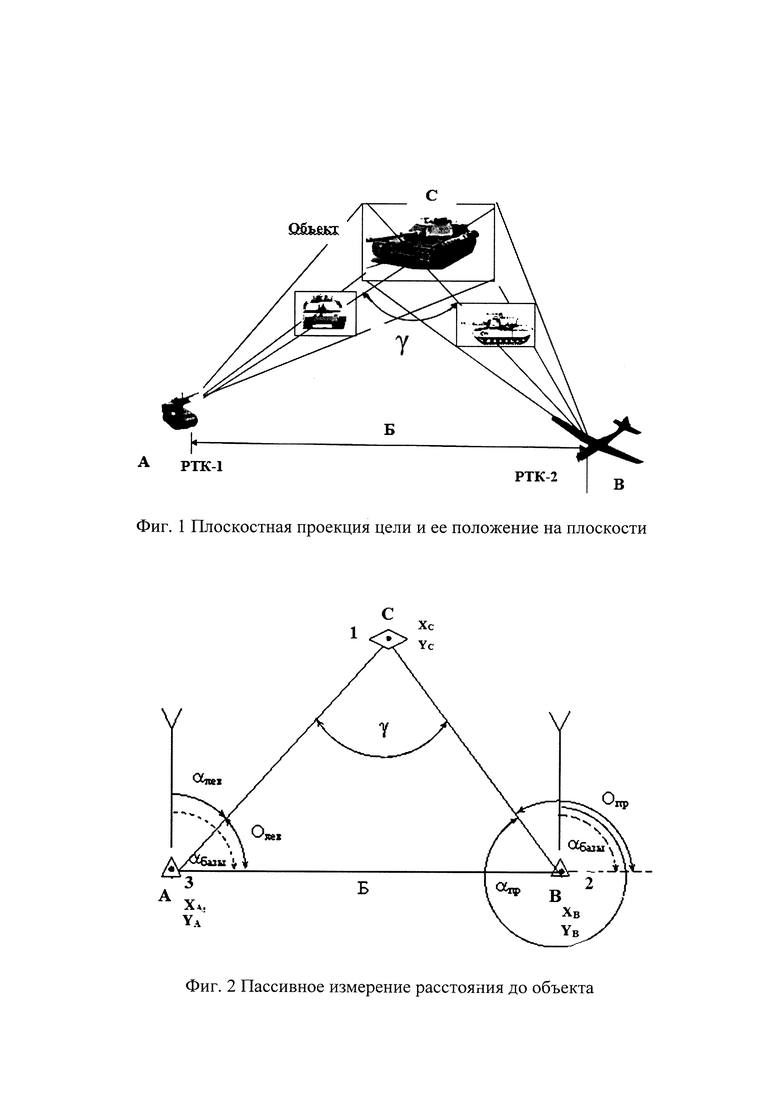
При ведении разведки необходимо не только обнаружение объекта, но его распознавание. В состав РТК обычно включен один оптико-электронный прибор разведки (мониторинга). При ведении разведки штатными монокулярным ОЭП обнаруживается только плоскостная проекция цели и ее положение на плоскости, что не дает возможности подробного распознавания объекта (можно принять мишень танка за танк) (фигура 1) [4].
Цель изобретения - качественное расширение возможностей по обнаружению и распознаванию замаскированных объектов штатными монокулярными ОЭП РТК при действии в «стае», повышение вероятности обнаружения и распознавания объектов, уменьшения массы устройства и повышения скрытности ведения разведки объектов противника при определении пространственного положения до объектов (целей) противника.
Цель достигается тем что, для создания объемного стереоскопического 3D-изображения объекта используется зафиксированные изображения объекта с различных точек наблюдения монокулярными ОЭП различных РТС, (расстояние между РТК представляет стереоскопическую базу наблюдения), которые подаются через блок вывода информации в центр управления «роем» РТК в котором изображения преобразуются в цифровой вид и поступают в электронный блок предварительной обработки изображений, где проводится анализ цифрового вида каждого изображения и наложение цифрового изображения объекта на изображение с соседнего ОЭП РТК, определяемой величиной стереоскопической базы, при этом дальнейшее определение характеристик объекта выполняется с помощью процессора анализа и обработки изображений, осуществляющего передачу данных об объекте по каналу передачи данных на вышестоящее устройство обработки и представления информации.
Функциональная схема устройства показана на фигуре 3.
Трехкоординатное устройство обнаружения и распознавания объектов монокулярными оптико-электронными приборами наземных и воздушных робототехнических комплексов на основе стереоскопического 3D-мониторинга монокулярными ОЭП РТК, состоит из штатных монокулярных ОЭП 1.1 и 2.1 с матрицами ПЗС 1.2 и 2.2, блока ориентирования и определения координат ОЭП РТК (GPS, инерциальной навигационной системы) 1.3 и 2.3, электронного блока предварительной обработки информации (положения в пространстве и изображений) 1.4 и 2.4, процессора анализа и обработки информации 1.5 и 2.5, канала вывода информации на штатное устройство обработки и представления информации 1.6 и 2.6.
Устройство функционирует следующим образом.
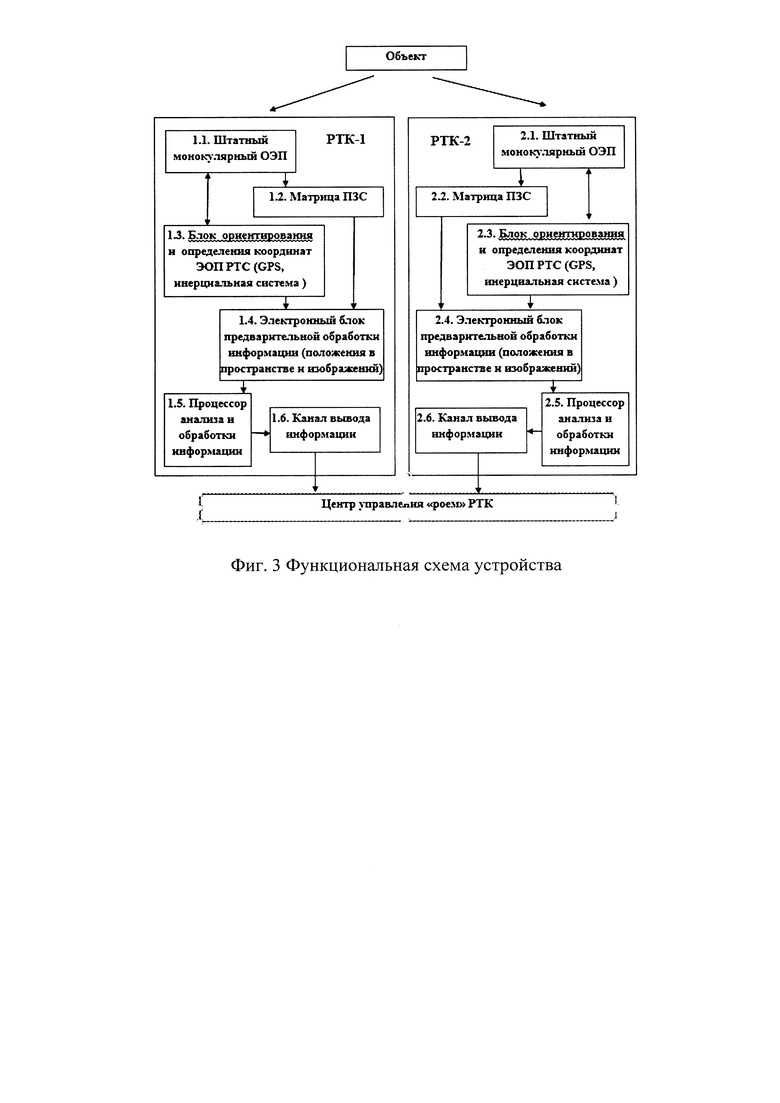
Изображения объекта С (фигура 2), зафиксированное монокулярным ОЭП РТС на разных точках движения РТС (точки А и В - представляющих стереоскопическую базу наблюдения) подаются со сканирующего устройства 2 через штатный монокулярный ОЭП 1 на матрицу ПЗС 3 в которой изображения преобразуются в цифровой вид и поступают в электронный блок предварительной обработки изображений 4 где проводится анализ цифрового вида каждого изображения и наложение цифрового изображения объекта на предыдущее с временной задержкой, определяемой величиной стереоскопической базы по известным координатам РТК (определяемым GPS или инерциальной системой), при этом дальнейшее определение характеристик объекта выполняется с помощью процессора анализа и обработки изображений 1.5 и 2.5 (фигура 3), осуществляющих передачу данных об объекте по каналу передачи данных на штатное устройство обработки и представления информации 1.6 и 2.6 в управления РТК (компьютер и т.д.), для создания прямого (ортоскопического), и обратного (псевдоскопического) стереоскопического изображения, используемых для распознавания объекта, что позволяет автоматизировать процесс решения задачи пространственной и временной селекции объектов и повысить эффективность разведки (обнаружения, распознавания и дальнометрирования объектов) монокулярными оптикоэлектронными приборами РТК при пассивном (скрытном) наблюдении.
Монокулярные ОЭП РТК позволяют определять отклонение визируемого объекта от осей ОЭП в вертикальной и горизонтальной плоскостях. Наличие базы (расстояния) между ОЭП отдельных РТК (матрицами ПЗС в блоках пассивного дальнометрирования РТК) позволяет определять дальность до объекта путем решения геодезического треугольника. Трех координатная пеленгация объекта позволяет решить прямую и обратную стереоскопическую задачи распознавания.
Электронный блок, блок предварительной обработки информации (положения в пространстве и изображений), процессор анализа и обработки информации могут находиться в центре управления РТК.
Технический результат мзобретения заключается в повышении вероятности обнаружения и распознавания замаскированных объектов, уменьшение массы устройства и повышения скрытности ведения разведки объектов противника при определении пространственного положения до объектов (целей) противника.
Предложенная система обеспечивает улучшение скорости распознаваемости на 30% и снижение ошибок в распознавании на 60%
Трех координатное устройство обнаружения и распознавания объектов цифровыми методами на основе стереоэффекта может функционировать в следующих режимах:
- в режиме определения положения объекта в плоскости наблюдения пассивном штатном монокулярном режиме - когда работает один штатный ОЭП РТК;
- в пассивном режиме измерения дальности до объекта пассивным (скрытым) методом путем решения геодезического треугольника.
- в пассивном режиме обнаружения и распознавания объекта на основе прямого стереоэффекта или на основе обратного стереоэффекта - когда задействованы соседние ОЭП РТК.
Предлагаемое устройства может быть реализовано в виде устройства обнаружения и распознавания объектов монокулярными оптико-электронными приборами наземных и воздушных робототехнических комплексов на основе стереоскопического 3D-мониторинга
Таким образом, использование изобретения позволит расширить возможности по обнаружению и распознаванию замаскированных объектов штатными монокулярными ОЭП РТК при действии в «стае».
Список используемых источников:
1. Пархоменко, А.В., Епифанов, А.И. Инерциальные системы автономной аппаратуры навигации и топопривязки наземных и воздушных робототехнических разведывательных комплексов [Текст]: монография / А. В. Пархоменко, А.И. Епифанов; под общ. ред. А.В. Пархоменко. - Пенза: Филиал В А МТО, Пенз. арт.инж. ин-т, 2019. - 281 с.: ил.
2. Пархоменко, А.В. и др. Инновационные предложения по технической реализации элементов комплексов ракетно-артиллерийского вооружения [Текст]: монография / А.В. Пархоменко, А. И. Богомолов, В. А. Пархоменко, А. И. Епифанов; под общ. ред. А.В. Пархоменко. - Пенза: Филиал ВА МТО, Пенз. арт.инж. ин-т, 2017. - 236 с.: ил.
3. Пархоменко А.В., Кобозев А.А. Основы устройства и эксплуатации топогеодезических приборов и навигационной аппаратуры. [Текст]: / В 2 ч. Ч. I. Основы устройства и эксплуатации топогеодезических приборов: учебное пособие для вузов / А.В. Пархоменко, А. А. Кобозев; под общ. ред. А. В. Пархоменко. Уч. пособие. - Пенза: ПАИИ, 2015. - 404 с: ил.
4. Пархоменко, А.В. и др. Построение и расчет перспективных оптико-электронных приборов [Текст]:/. Учебное пособие. / А.В. Пархоменко, А.Г. Дмитриенко, А.В., Блинов, В.П. Фандеев, Р.А. Тюков./ под общ. ред. А.В. Пархоменко. - Пенза: ВУНЦ СВ «ОВА ВС РФ» (фил.), 2012. - 358 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРАЛЛЕЛЬНОЙ РАСПРЕДЕЛЁННОЙ РАБОТЫ ГРУППЫ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ПРИ РЕШЕНИИ ЗАДАЧИ РАСПОЗНАВАНИЯ МНОЖЕСТВА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2024 |
|
RU2828320C1 |
| СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ В УПРАВЛЯЕМЫХ БОЕПРИПАСАХ | 2004 |
|
RU2295103C2 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ТЕМПЕРАТУРНЫХ ИСПЫТАНИЙ ВОЕННЫХ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2005 |
|
RU2293959C2 |
| Способ пассивного определения дальностей до объектов с изменяемой точностью по изображениям с трех цифровых видеокамер | 2024 |
|
RU2835007C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЕ КООРДИНАТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2523446C2 |
| НАШЛЕМНАЯ РАЗВЕДЫВАТЕЛЬНАЯ СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2349864C2 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ПРИЕМНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433435C1 |
| ЛАЗЕРНЫЙ ПРИБОР РАЗВЕДКИ | 2020 |
|
RU2755587C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СРЕДСТВ | 2018 |
|
RU2703921C1 |
Способ обнаружения и распознавания использует устройство, содержащее штатные монокулярные ОЭП, размещенные на различных РТК, блок сканирующих устройств, электронный блок предварительной обработки изображений, процессор анализа и обработки изображений, канал вывода информации. Для создания объемного стереоскопического 3D-изображения объекта используют фиксацию изображения объекта с различных точек траектории движении различных ОЭП РТК, представляющих стереоскопическую базу наблюдения. Изображения объекта подают через штатный монокулярный ОЭП на матрицу ПЗС, преобразуют в цифровой вид и направляют в электронный блок предварительной обработки изображений, где проводят их анализ и наложение цифрового изображения объектов с разных точек фиксации объекта. Процессор анализа и обработки изображений осуществляет передачу данных об объекте по каналу передачи данных на штатное устройство обработки и представления информации для создания прямого и обратного стереоскопического изображения. Технический результат - повышение вероятности обнаружения и распознавания замаскированных объектов, уменьшение массы устройства и повышение скрытности ведения разведки объектов противника. 3 ил.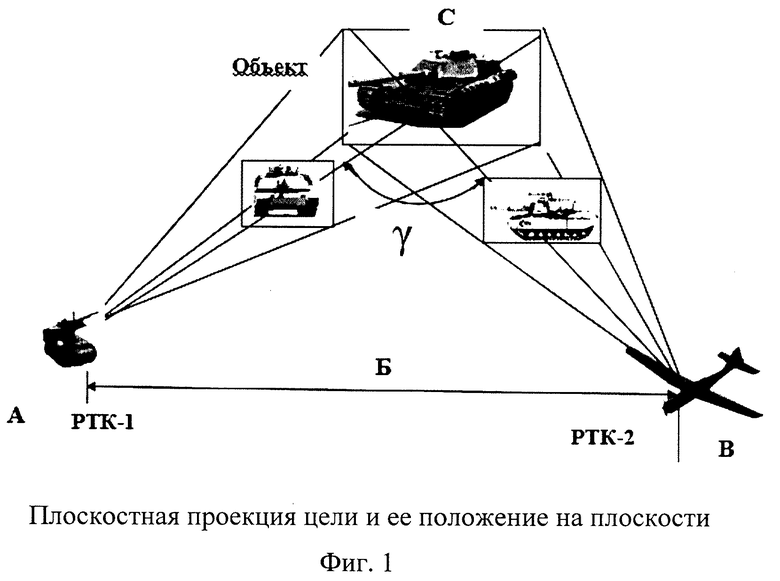
Способ обнаружения и распознавания объектов монокулярными оптико-электронными приборами (ОЭП) наземных и воздушных робототехнических комплексов (РТК) на основе стереоскопического 3D-мониторинга, в котором с помощью устройства, содержащего штатные монокулярные ОЭП, размещенных на различных РТК, ориентированных в пространстве с помощью навигационной аппаратуры, блок сканирующих устройств, электронный блок предварительной обработки изображений, процессор анализа и обработки изображений, канала вывода информации, для создания объемного стереоскопического 3D-изображения объекта используют фиксацию изображения объекта с различных точек положения различных ОЭП РТК, представляющих стереоскопическую базу наблюдения, при этом изображения объекта, зафиксированные монокулярными ОЭП на разных точках траектории движении РТК, подают через штатный монокулярный ОЭП на матрицу ПЗС, в которой изображения преобразуются в цифровой вид и поступают в электронный блок предварительной обработки изображений, где проводят анализ цифрового вида каждого изображения и наложение цифрового изображения объектов с разных точек фиксации объекта, при этом дальнейшее определение характеристик объекта выполняют с помощью процессора анализа и обработки изображений, осуществляющего передачу данных об объекте по каналу передачи данных на штатное устройство обработки и представления информации, для создания прямого и обратного стереоскопического изображения, используемых для распознавания объекта, что позволяет автоматизировать процесс решения задачи пространственной и временной селекции объектов и повысить эффективность разведки монокулярными оптико-электронными приборами РТК при пассивном наблюдении.
| УПРУГАЯ МУФТА | 0 |
|
SU179137A1 |
| Способ определения степени распыливания жидкого топлива и устройство для осуществления способа | 1949 |
|
SU84539A1 |
| US 2014009575 A1, 09.01.2014 | |||
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |

