Область техники, к которой относится изобретение
Настоящее изобретение относится к области противодействия хищению собственности, а в более общем аспекте к области досмотра субъекта с целью предотвращения незаконного выноса и вноса предметов различного типа в контролируемые здания. В дальнейшем, наряду с термином «субъект» в аналогичном значении используются такие термины, как «человек», «лицо», «проверяемый», «досматриваемый» и т.п.
Уровень техники
Прогноз возможного развития техники в указанной сфере в последние годы предсказывал, что при построении новых пунктов досмотра на входе и выходе из зданий перспективным является использование технологий дистанционного обнаружения, при котором при помощи установленных на удалении чувствительных устройств досмотр людей можно было бы производить с минимумом контакта или вообще без контакта с субъектом.
В действительности же такие дистанционные технологии трудно поддаются внедрению, поскольку на пути обнаружения возможных, представляющих интерес предметов стоят серьезные физические проблемы. Эти проблемы связаны с малыми количествами материалов, которые должны быть обнаружены, по сравнению с массой/поверхностью человеческого тела и большим разнообразием ограничивающих условий (положение, форма, объем предмета и тела). И единственно эффективным решением, которое может быть применено в работе, по-прежнему является приближение чувствительных устройств к телу человека на близкое расстояние.
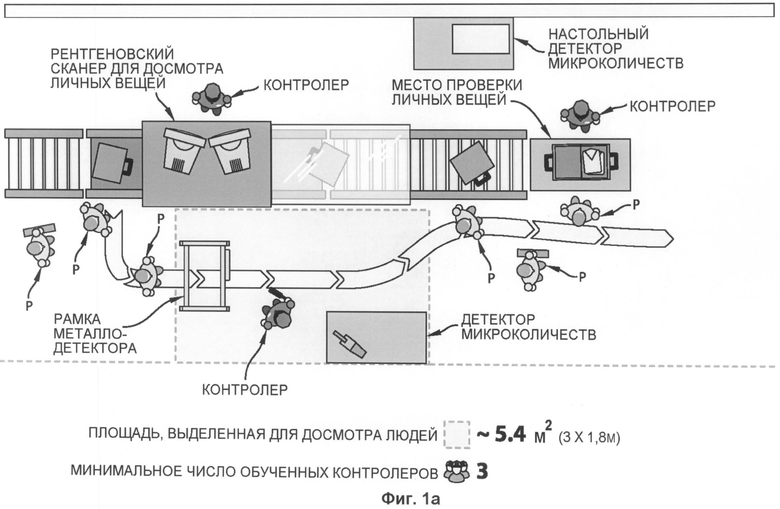
На фиг.1а показан пункт досмотра традиционной схемы, какие используются в настоящее время.
Лицо Р, подлежащее досмотру, просят выложить на транспортер рентгеновского контроля его/ее личные вещи, а также пальто, пиджак, кошельки и все крупные металлические предметы (т.е. камеры, плееры, сотовые телефоны и т.п.). После этой первой операции лицо проходит через рамку металлодетектора, которая настроена на обнаружение возможных металлических предметов, даже и малого размера.
Рамка металлодетектора не может обнаруживать предметы, которые не содержат металла, следовательно, согласно требованиям досмотра, чтобы завершить процедуру проверки, приходится поочередно использовать несколько технологий, например ручное ощупывание, ручной сбор частиц с поверхности тела с последующим их анализом на настольном анализаторе.
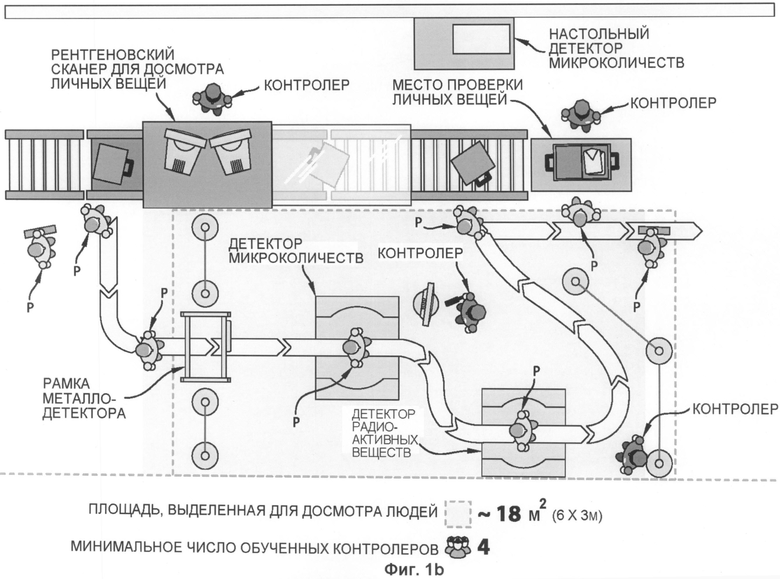
Согласно фиг.1b, обнаружение радиоактивных веществ может быть проведено при помощи ручных приборов или, более эффективно, посредством дополнительных специализированных рамок.
В некоторых местах устанавливают специальные кабины, действие которых основано на том же принципе, что и у настольного анализатора. Лицо, подлежащее досмотру, останавливается внутри кабины, а система всасывания создает вокруг его/ее тела сильный воздушный поток. Собранные частицы анализируются масс-спектрометром с целью обнаружения искомых веществ даже в минимальных количествах.
На фиг.1с представлена схема пункта досмотра, оборудованного недавно предложенным для применения микроволновым сканером, который должен использоваться последовательно с рамкой металлодетектора. В основе микроволнового сканера лежат устройства, формирующие изображения в микроволновом диапазоне. Человека сканируют при помощи двух вертикальных линейных антенных решеток, вращающихся вокруг его/ее тела (вокруг вертикальной оси). В других конструкциях человека просят повернуться на 360° вокруг своей оси перед чувствительной панелью. С технической точки зрения, очевидно, что использование нескольких технологий является необходимым, поскольку одного единственного датчика не достаточно для измерения тех физических величин, которые вовлечены в процесс обнаружения всех возможных, подлежащих поиску материалов.
С другой стороны, увеличение числа технологий, применяемых на пунктах досмотра, создает значительные проблемы, связанные с:
потребными площадями, ибо помещения, которыми располагает служба безопасности, ограничены по размеру и во многих случаях едва достаточны для размещения традиционного набора оборудования;
числом работников, которые необходимы для работы с различными устройствами, ибо большое число приборов обнаружения требует большего числа специализированных контролеров, чтобы обеспечить процесс досмотра достаточно большого потока людей;
подготовкой контролеров, ибо каждая единица установленного оборудования требует особой подготовки для ее применения и планирования на годы вперед соответствующего процесса переподготовки.
Вышеперечисленные проблемы влекут за собой увеличение стоимости операций, но более всего - становится критичным планирование пункта досмотра. Пункт перенасыщается оборудованием, с ним становится трудно работать из-за сложности процедур, что является причиной увеличения вероятности ошибок.
Кроме того, использование микроволновых сканеров порождает проблемы этического характера и проблемы прав личности, связанные с получением изображения, поскольку лицо, подвергаемое анализу, предстает там в виде контура в обнаженном виде. Возможность использования сканеров для досмотра вызвала дискуссию в США и Европе.
Раскрытие изобретения
Задача настоящего изобретения состоит в решении, по меньшей мере, одной из вышеуказанных проблем.
Согласно изобретению, предлагается система досмотра субъекта, охарактеризованная в п.1 формулы изобретения.
Согласно изобретению, предлагаемая система дополнительно определяется признаками п.п.2-27 формулы, которые можно рассматривать как по отдельности, так и в любых возможных сочетаниях.
Изобретение также касается способа использования указанной системы, который охарактеризован в п.28 формулы.
Согласно изобретению, указанный способ дополнительно определяется признаками п.29 формулы.
Изобретение дает множество преимуществ.
В частности, система, соответствующая настоящему изобретению, позволяет досматривать людей на наличие нескольких возможных искомых предметов в течение нескольких секунд и значительно сократить площадь пункта досмотра, выделяемую для такого контроля.
Система также позволяет оценить местонахождение искомого предмета на человеке, не получая при этом изображения его/ее контура в обнаженном виде.
Краткое описание чертежей
Варианты выполнения настоящего изобретения будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1а-1с изображают пункты досмотра, соответствующие существующему уровню техники;
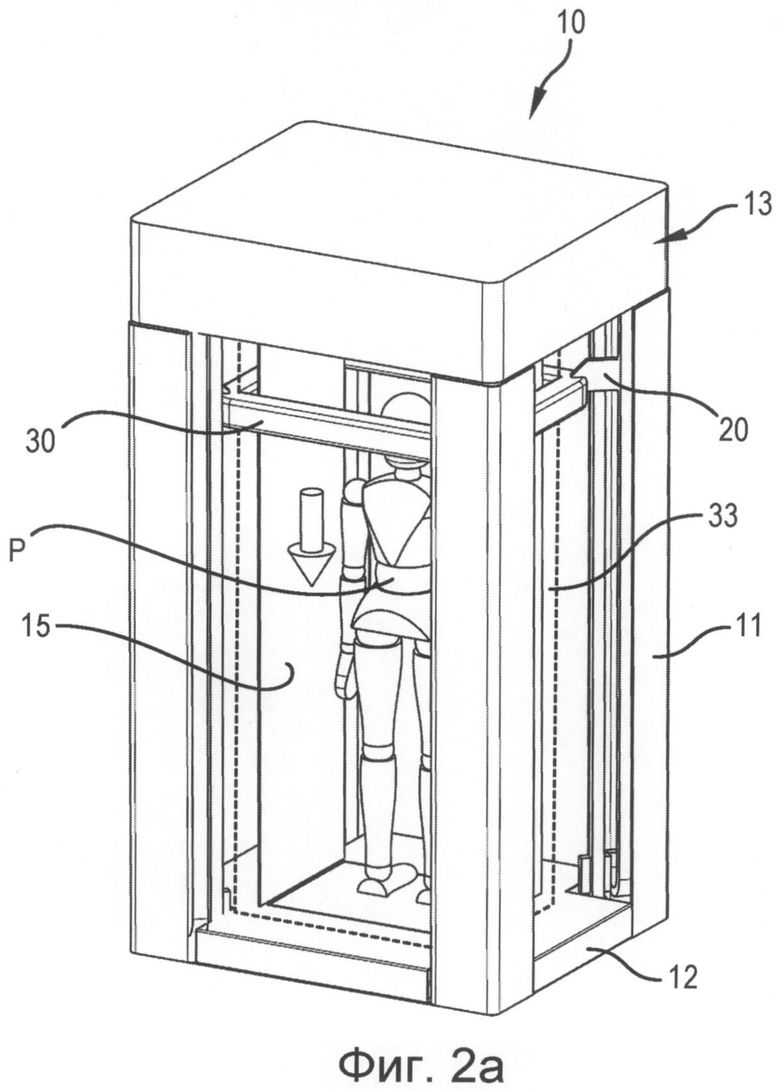
фиг.2а в перспективной проекции, с верхней точки изображает соответствующую настоящему изобретению кабину, в которой находится подлежащий досмотру человек;
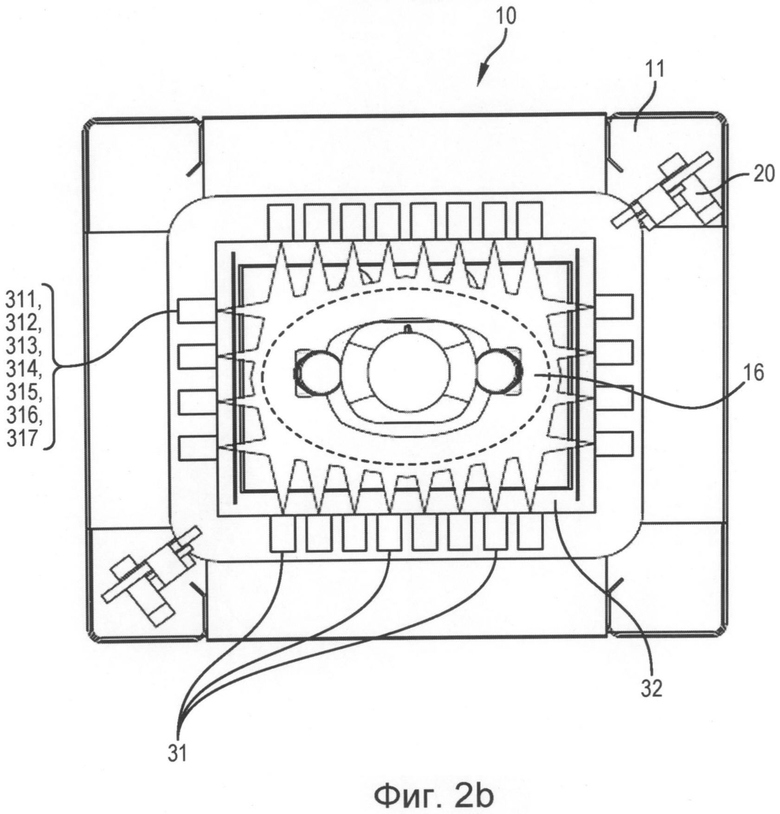
фиг.2b в сечении, на виде сверху изображает соответствующую настоящему изобретению кабину, в которой находится подлежащий досмотру человек;
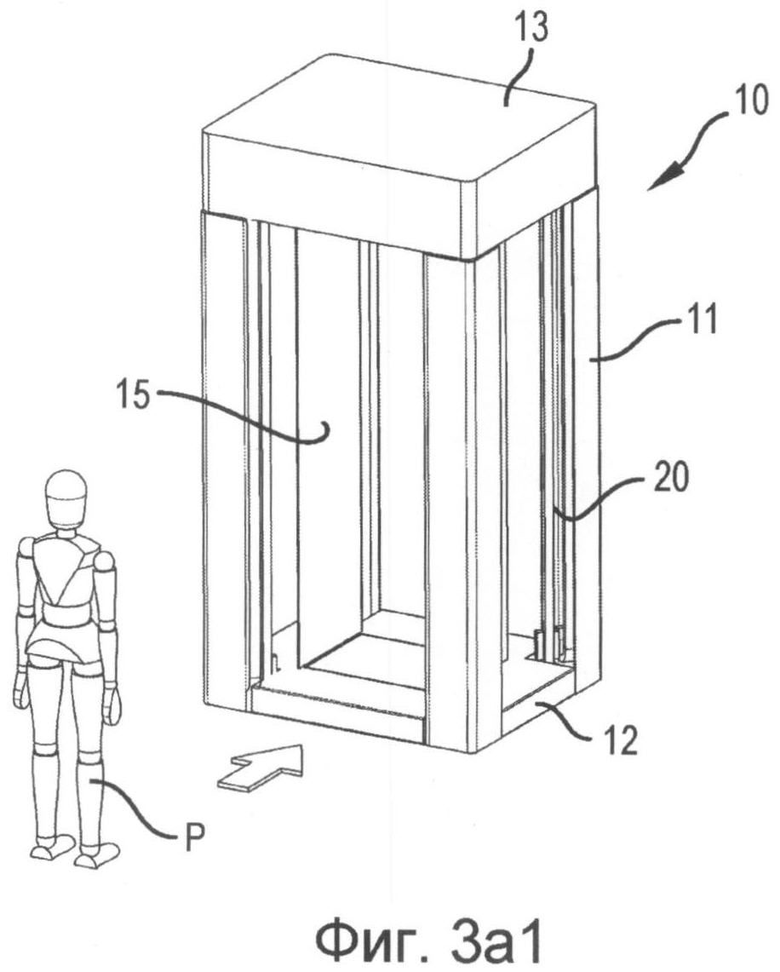
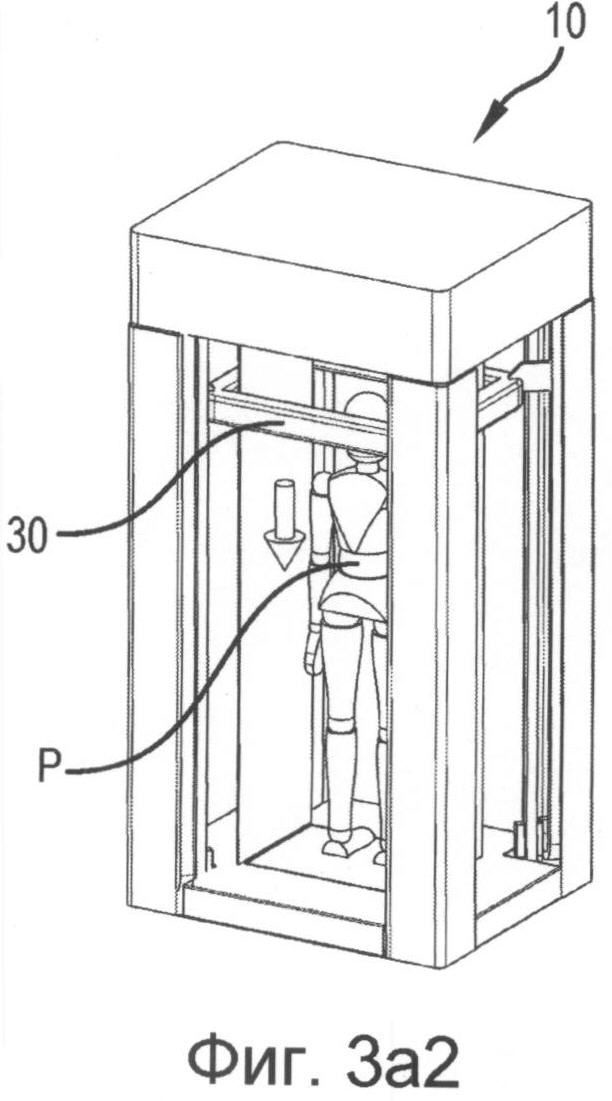
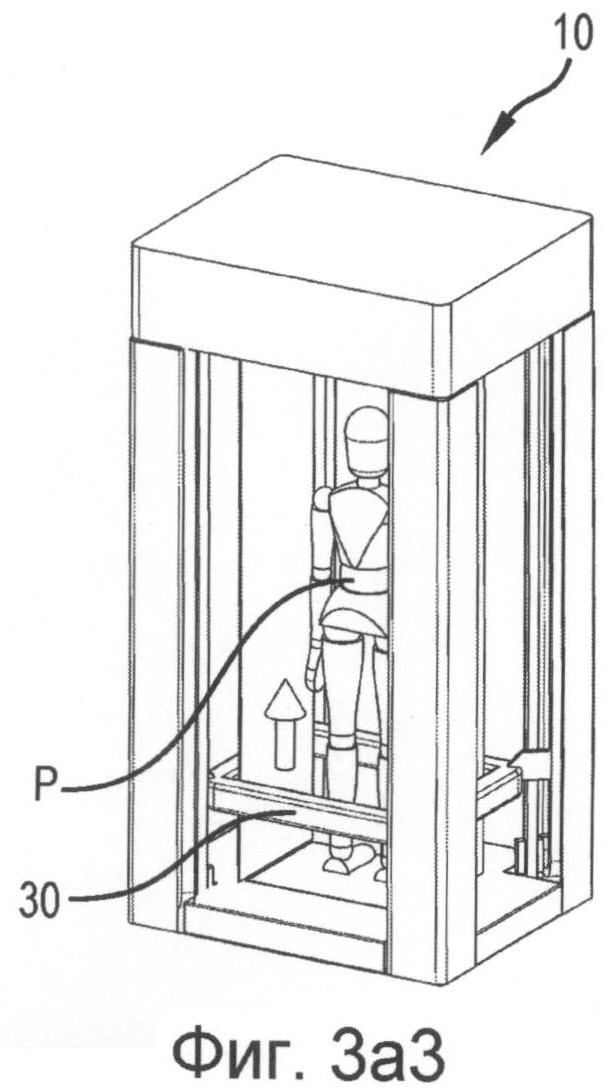
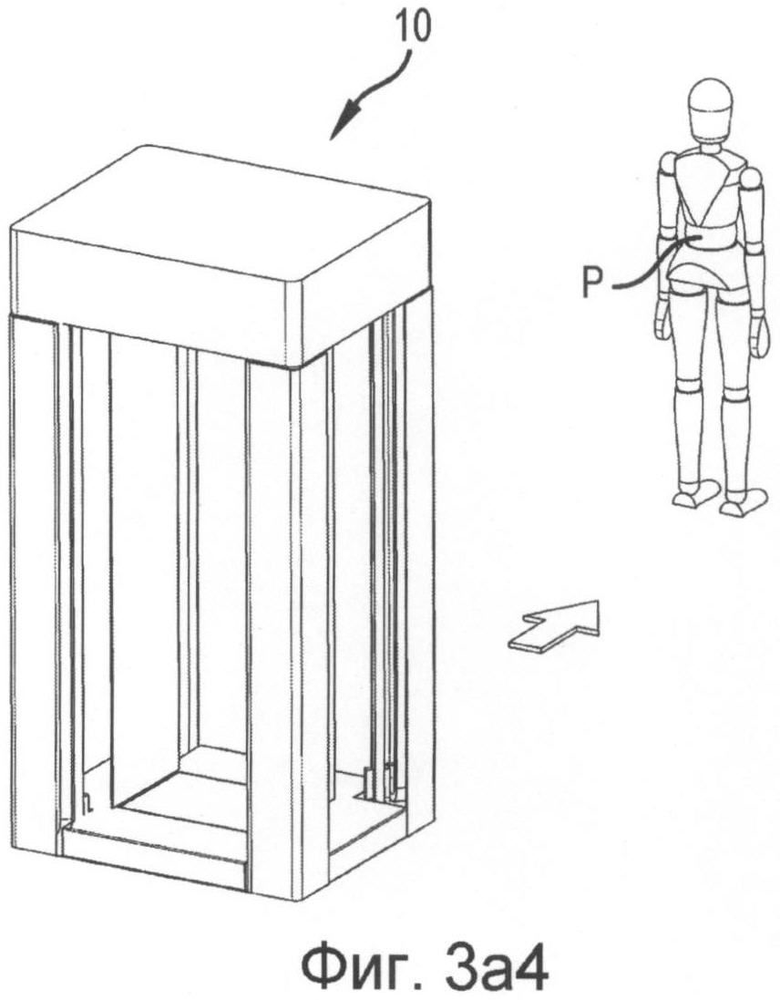
фиг.3а1-3а4 изображают зондирование подлежащего досмотру человека, соответствующее настоящему изобретению;
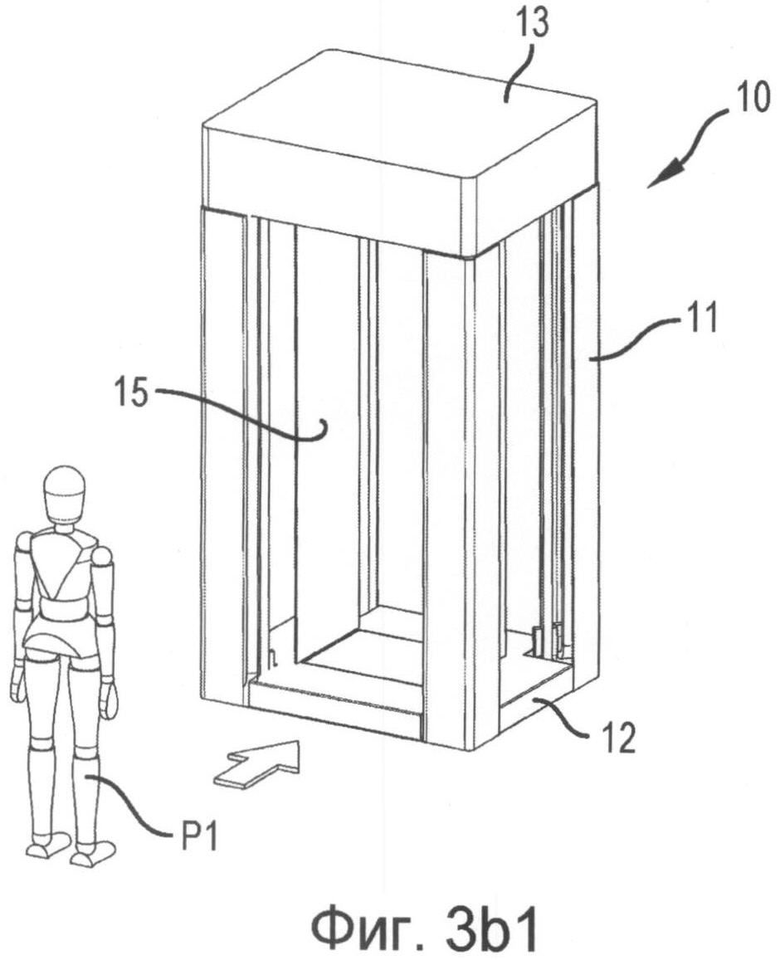
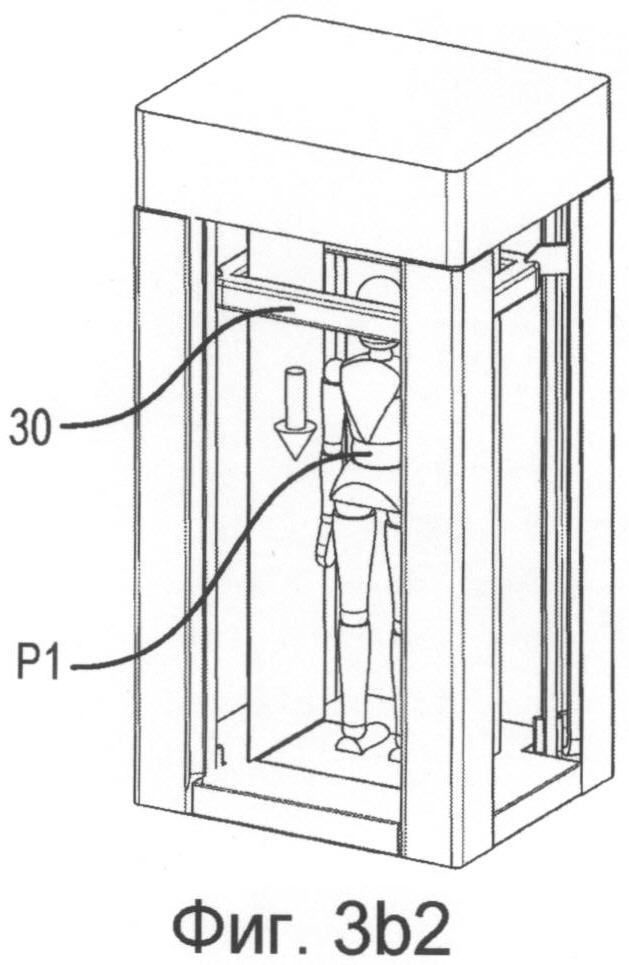
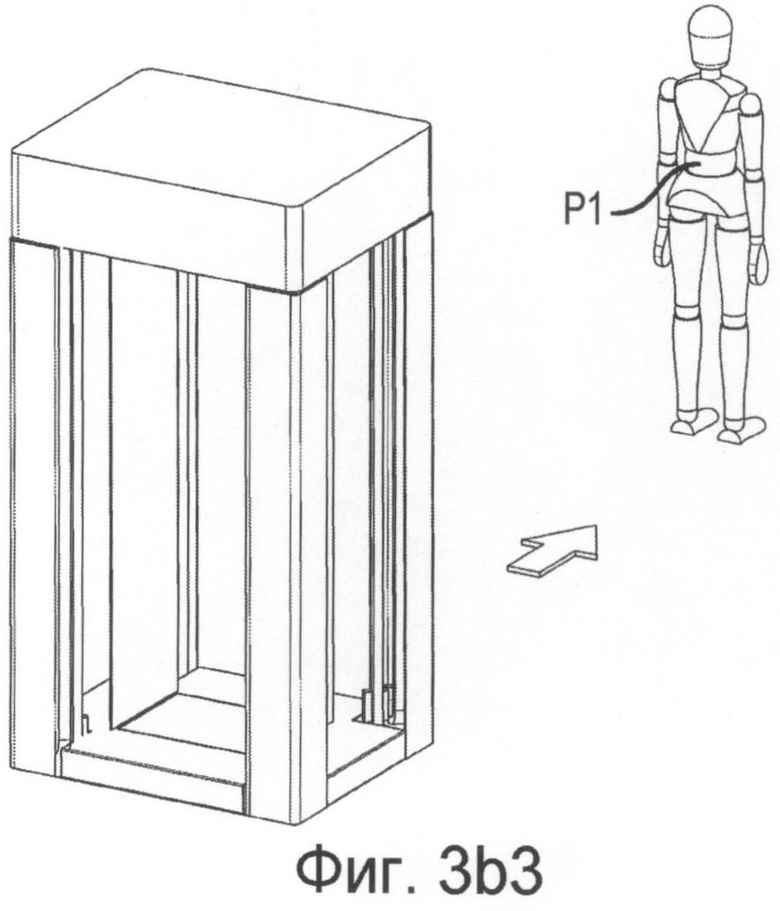
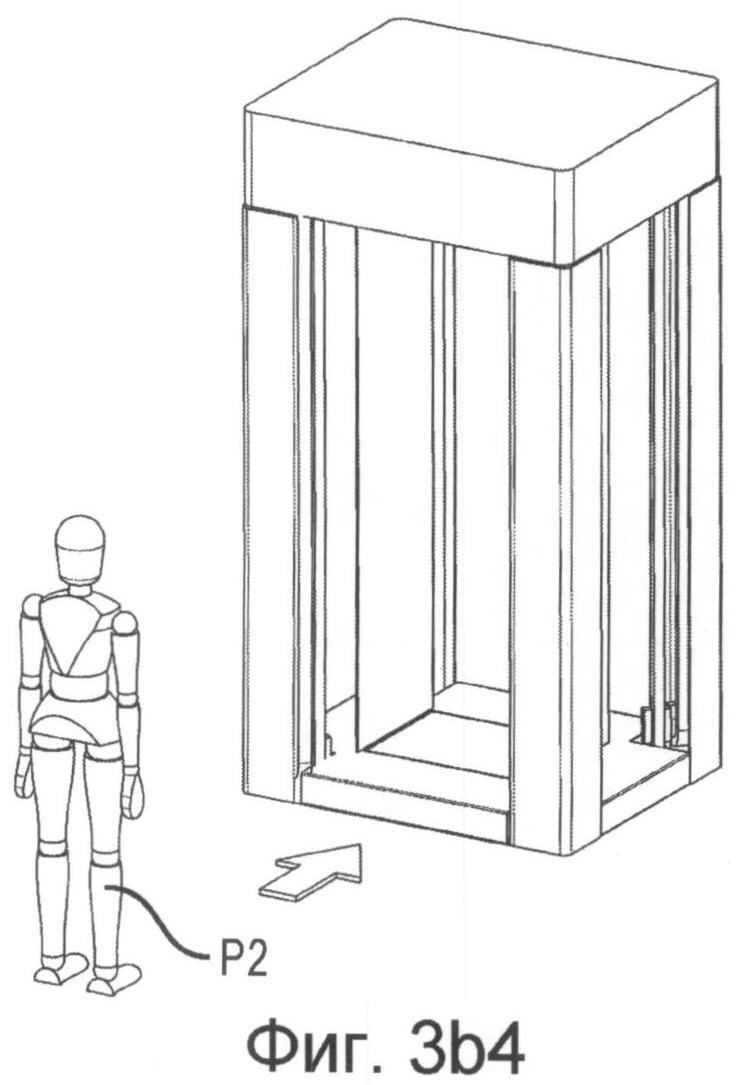
фиг.3b1-3b6 изображают два следующих друг за другом акта зондирования двух подлежащих досмотру людей, в соответствии с настоящим изобретением;
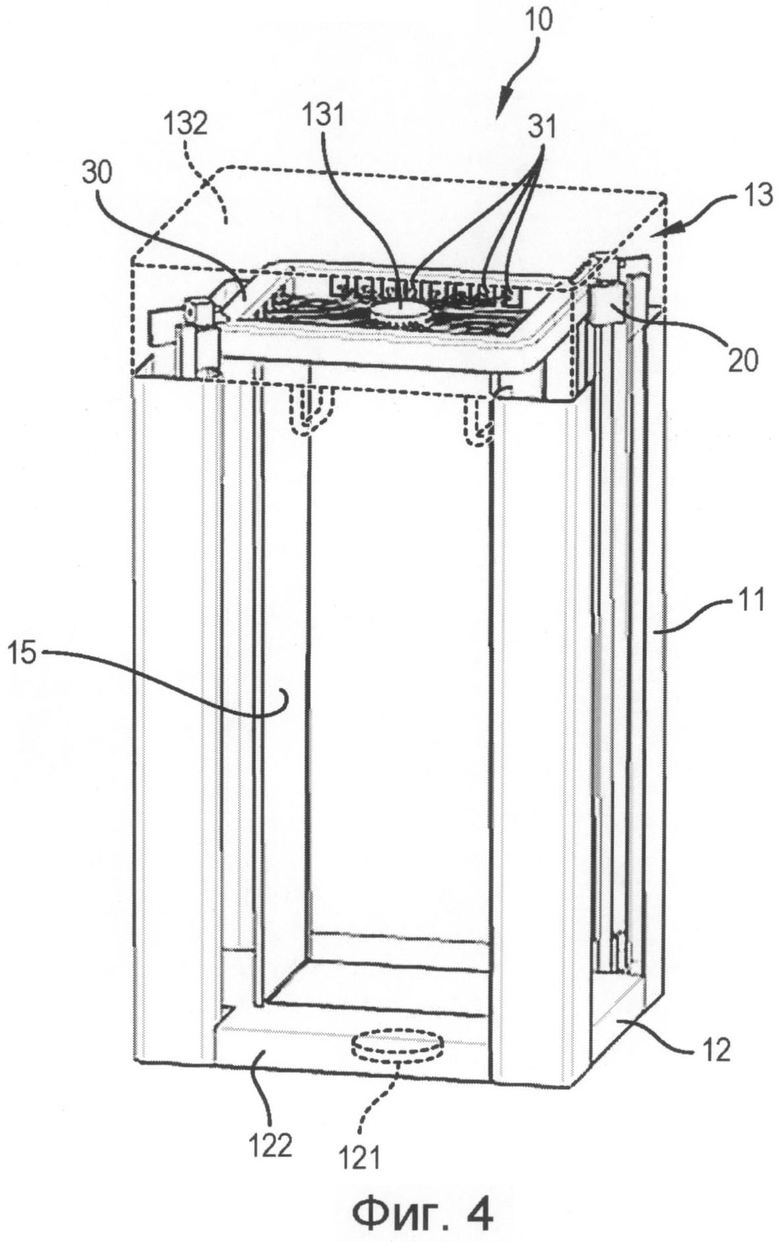
фиг.4 изображает соответствующую настоящему изобретению кабину с опорными калибровочными источниками;
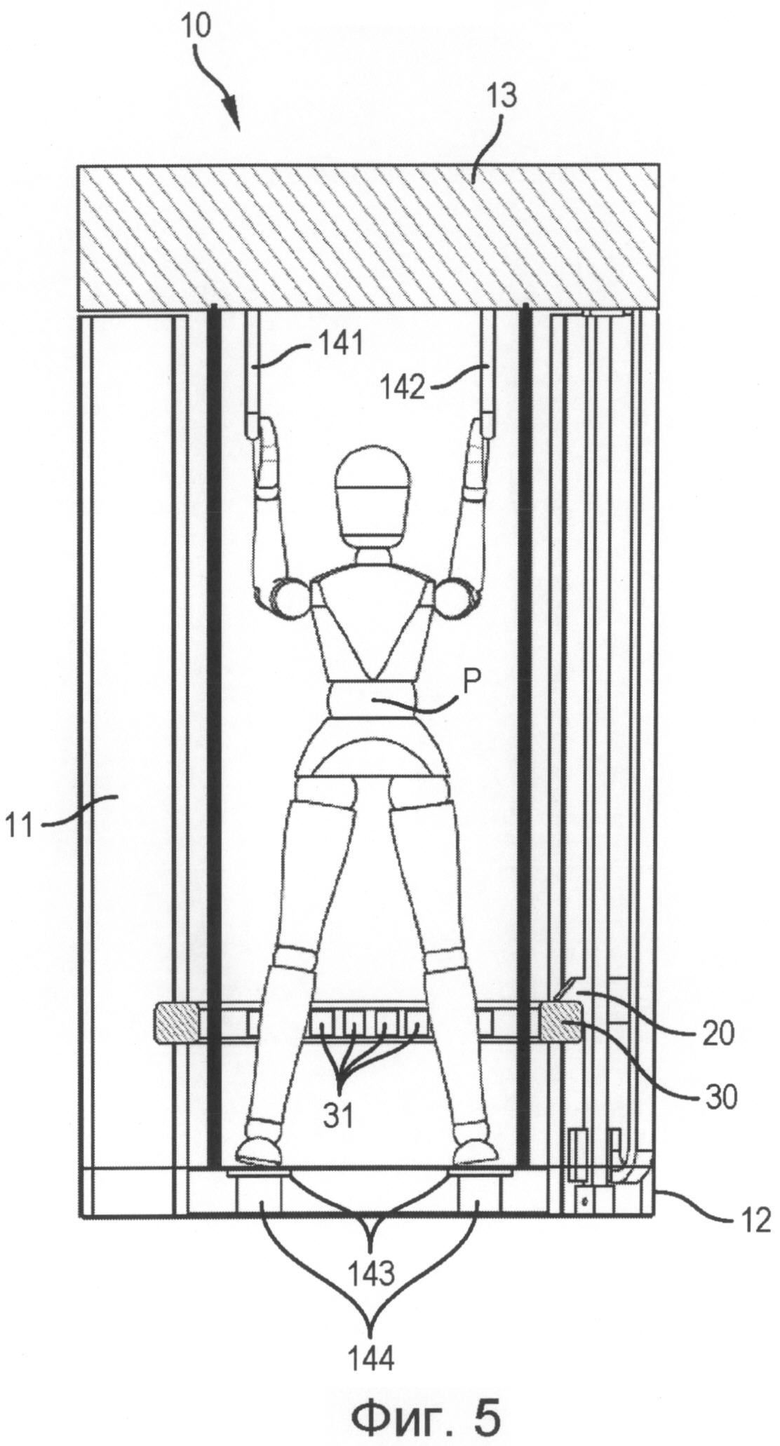
фиг.5 изображает соответствующую настоящему изобретению кабину со средствами обнаружения, назначение которых заключается в проверке того, что подлежащий досмотру человек принял позу, оптимальную для анализа;
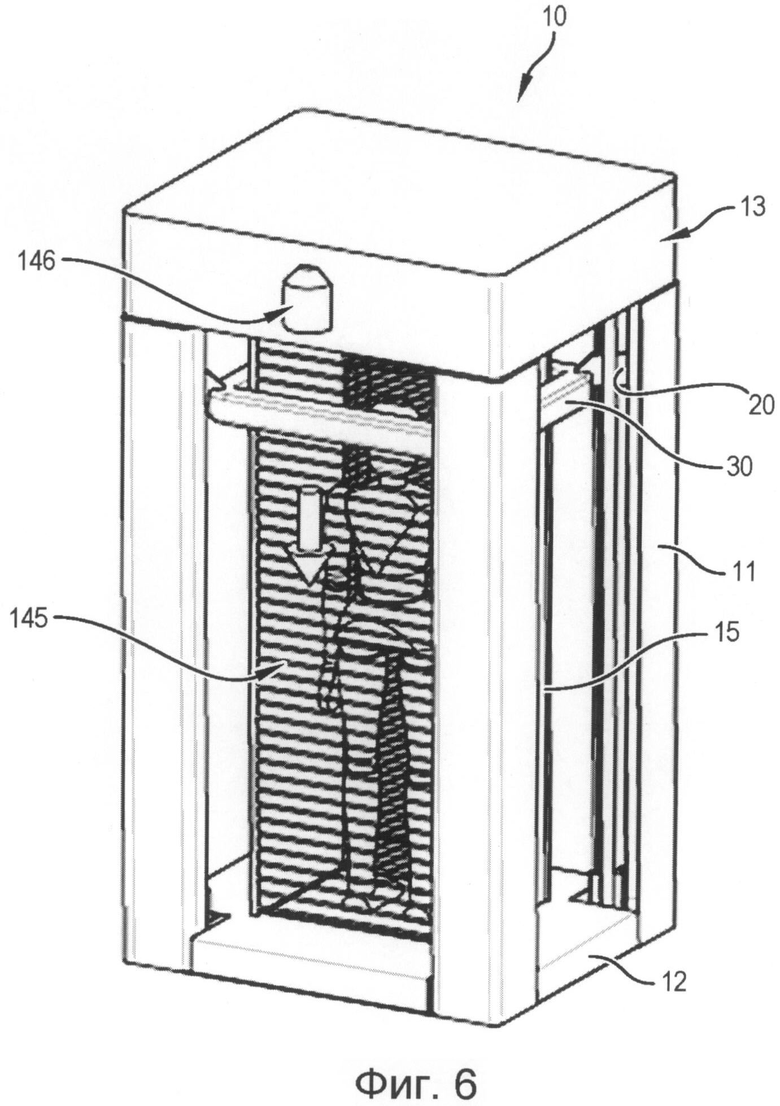
фиг.6 изображает соответствующую настоящему изобретению кабину со средствами обнаружения, назначение которых заключается в проверке того, что подлежащий досмотру человек находится в определенной зоне;
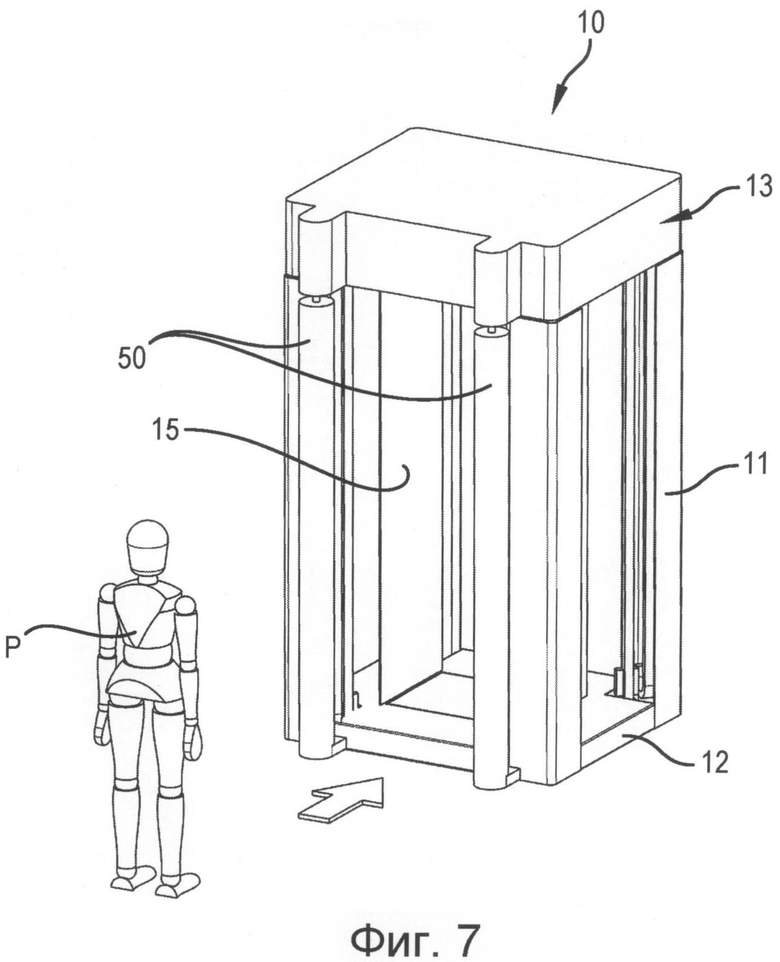
фиг.7 изображает соответствующую изобретению кабину с металлодетектором;
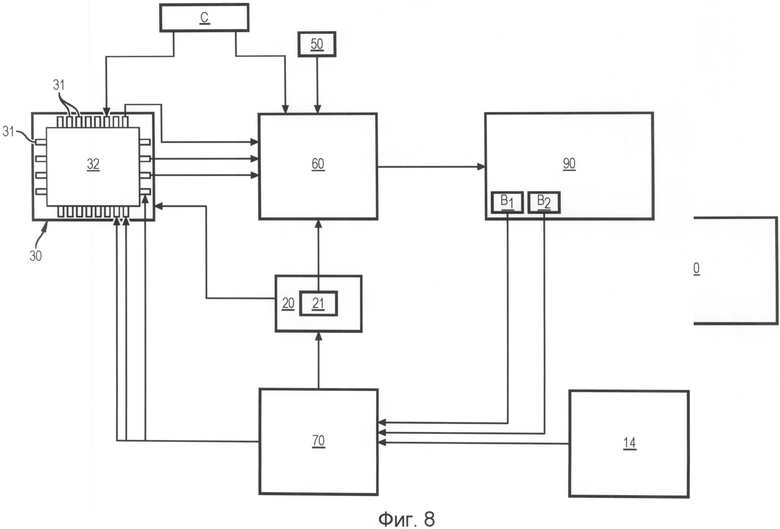
фиг.8 изображает схему соответствующей изобретению системы для досмотра человека;
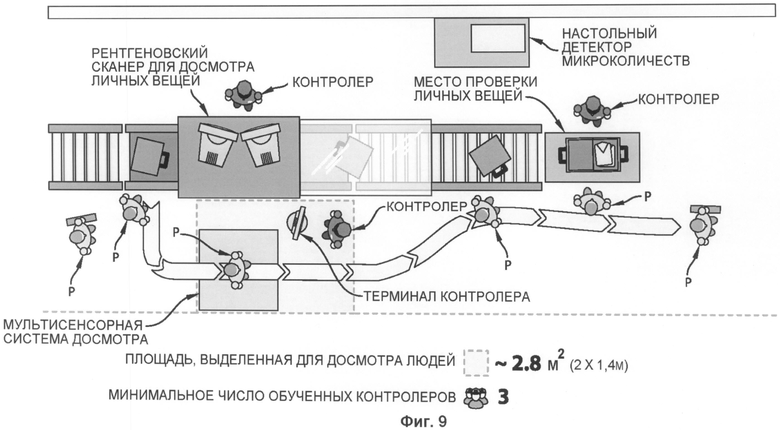
фиг.9 изображает пункт досмотра, в котором используется система досмотра человека, соответствующая изобретению;
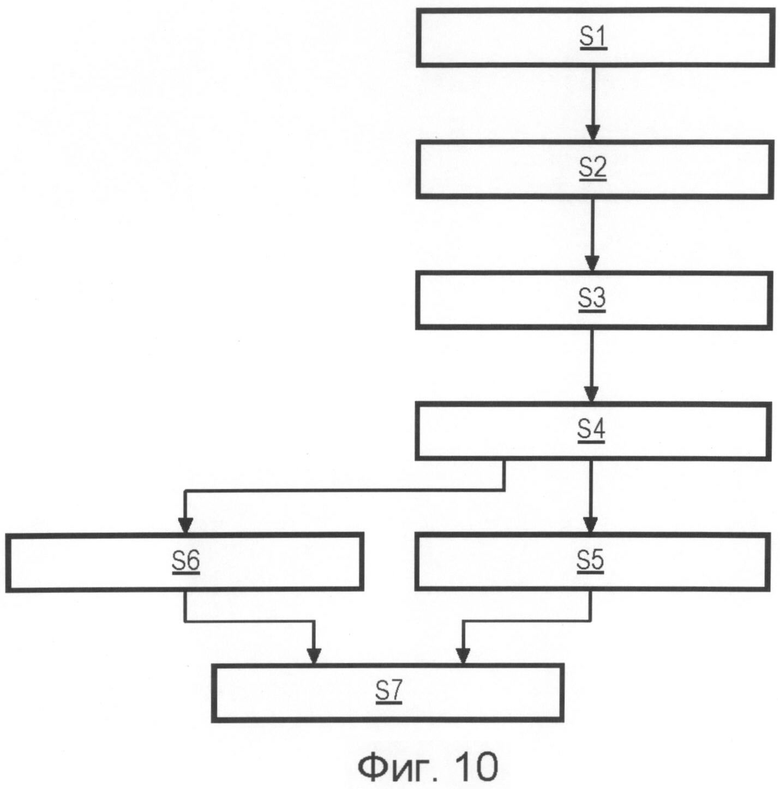
фиг.10 схематически изображает соответствующий изобретению способ досмотра человека.
Осуществление изобретения
Соответствующая изобретению система позволяет вести досмотр людей с использованием одновременно множества датчиков при наиболее эффективной геометрии их расположения. Одна из задач изобретения состоит в минимизации расстояния между датчиками и поверхностью тела человека.
В то же самое время данное изобретение, как будет понятно из дальнейшего описания, минимизирует пространство, необходимое для развертывания технологий, необходимых для досмотра, решая проблему помещений малой площади, которые предоставляют в холлах общественных или частных зданий.
Другое преимущество изобретения заключается в том, что оно интегрирует все необходимые датчики в единой несущей рамке, существенно снижая число работников, необходимых для проведения досмотра, и связанные с этим затраты на персонал. Как следствие такой интеграции, процедуры досмотра также будут упрощены, и будет уменьшена вероятность человеческой ошибки.
Дополнительным полезным качеством изобретения является то, что рассматриваемый механизм даст возможность в будущем встраивать дополнительные технологии обнаружения, не меняя основ и логики самого механизма.
Дополнительное преимущество настоящего изобретения состоит в том, что лицо, подлежащее досмотру, будет удерживаться в процессе досмотра минимально возможное время с минимумом неудобств, и при этом будет обеспечена высокая пропускная способность системы. Досматриваемому лицу будет предложено только постоять в позе, оптимальной для анализа в течение нескольких секунд.
Приступая к описанию изобретения, вначале следует напомнить, что в процессе досмотра каждого человека поиск должен быть произведен по всей поверхности его/ее тела.
В наиболее стандартной ситуации при ручном ощупывании контролер начинает с верхней части тела и движется вниз, к ногам. На каждой высоте контролер касается человека по всей ширине корпуса. Процесс повторяют два раза, один раз касаясь боков, затем спереди и сзади. Весь досмотр занимает 30-40 с, при этом он основан на способности контролера «почувствовать» руками наличие лишнего предмета. Качество такого досмотра может страдать в случае, если контролер случайно пропустит какой-то участок тела или если предмет слишком мал и тонок, чтобы его можно было найти при ручном ощупывании. Кроме того, такой процесс является «актом вмешательства», поскольку требует физического контакта с проверяемым лицом.
В любом случае, несмотря на то что способу присущи вышеуказанные недостатки, ручное ощупывание является наиболее эффективной процедурой с точки зрения времени досмотра, поскольку досмотр выполняется последовательно, по горизонтальным поясам, вдоль вертикальной (главной) оси человеческого тела и тем самым обеспечивается минимальное время досмотра.
Согласно фиг.8, в соответствии с одним из аспектов настоящего изобретения система для досмотра лиц, в общем, содержит множество датчиков 31, расположенных на рамке 30. Рамка 30 помещена в кабину 10 (на фиг.8 не показана) и определяет зону 16 анализа (на фиг.8 не показана), которая предназначена для размещения человека, подлежащего досмотру.
Система также содержит привод 20 для перемещения рамки внутри кабины. Величина перемещения полой части 32 рамки определяет область 33 действия рамки (на фиг.8 не показана). Естественно, что зона анализа входит в область действия рамки.
Пока рамка перемещается при помощи привода 20, датчики собирают информацию из полой части 32 и формируют сигналы, которые представляют данную информацию.
Устройство 60 обработки анализирует сигналы, пытаясь обнаружить в них возможное присутствие искомых предметов в зоне анализа.
На рамку с успехом может быть установлено несколько типов датчиков 31, хорошо известных из открытых источников. Они могут быть установлены друг на друга или рядом друг с другом, таким образом, чтобы за один проход рамки можно было обнаруживать несколько предметов. Таким образом, указанные датчики выполнены с возможностью сбора информации о разных физических величинах и одновременного считывания нескольких возможных сигналов от предметов. Они обеспечивают считывание характеристик тела человека в масштабе реального времени, во время передвижения рамки.
В предпочтительном случае множество датчиков 31 включает в себя пассивные и активные индуктивные датчики (311, 312), пассивные и активные микроволновые датчики (313, 314), инфракрасные датчики (315) или датчики (316) гамма-излучения.
Желательно, чтобы конструкция рамки позволяла устанавливать на нее датчики, иные, нежели электромагнитные, и чтобы при этом способ работы системы оставался неизменным.
Устройство 60 обработки выполнено с возможностью объединения сигналов и определения взаимной корреляции сигналов, сформированных датчиками, и их сравнения с заданными порогами.
Результаты анализа полезно визуализировать посредством контроллера на интерактивном устройстве 90. Их также можно передавать во внешнюю сеть данных, чтобы иметь возможность их накопления во внешней базе данных или соединения с другими данными из других систем обнаружения.
Система также содержит, по меньшей мере, один опорный калибровочный источник С, позволяющий заново точно калибровать датчики и устройство обработки, например, перед досмотром каждого нового человека.
В силу этого интерпретация сигналов устройством 60 обработки оказывается более точной.
Система также содержит средства 70 для управления анализом, которые могут в нужное время запускать в работу датчики и включать привод 20.
Желательно, чтобы интерактивное устройство 90 содержало кнопку В1 ручного анализа и аварийную кнопку В2, которые управляют средствами 70, так чтобы контролер мог вручную запускать анализ и останавливать анализ в случае опасной ситуации, например, если проверяемый покинет зону 16 анализа во время движения рамки (30).
Далее со ссылками на фиг.2а и 2b будет описана соответствующая изобретению кабина 10 системы.
В предпочтительном варианте у кабины имеется сторона входа, сторона выхода и ограничительные стенки 15, так что человеку Р должно быть понятно, как входить в кабину.
Кабина также может содержать входную дверь и выходную дверь.
В кабине 10 имеется одна или несколько направляющих 11, например четыре, чтобы задавать направление рамке 30 в вертикальном направлении, когда производится перемещение рамки приводом 20. Привод 20 может быть, например, винтового типа (содержать спиральные винты) или механизированный линейно-осевого типа.
Рамка 30 может быть по существу прямоугольной формы или иной формы, при условии, чтобы она по сути определяла полую часть 32, например, по существу, круговой формы. Не обязательно, чтобы это была замкнутая кривая.
Желательно, чтобы рамка 30 располагалась, по существу, горизонтально.
Штриховые линии на фиг.2а показывают область 33 действия рамки, в которой предположительно должен оставаться человек, подлежащий досмотру, чтобы не повредить устройства системы и самому не получить повреждений.
Зона 16 анализа показана штриховыми линиями на фиг.2b. Она соответствует той зоне, из которой каждый из множества датчиков 31 способен собирать информацию во время перемещения рамки.
В предпочтительном случае число датчиков достаточно велико, и они расположены на рамке 30 так, чтобы целиком охватить периметр корпуса человека Р. Поэтому, когда осуществляется перемещение рамки, датчики просматривают всю поверхность тела человека Р с головы до пят, при условии, что проверяемый Р стоит целиком внутри зоны 16 анализа.
Устройство 60 обработки синхронизируется с фактической высотой положения рамки, например, при помощи кодового датчика 21 углового положения, установленного в приводе 20.
Полезно, чтобы на рамке 30 были установлены оптические датчики (317) для считывания в масштабе реального времени расстояния от поверхности тела человека до датчика. Такая информация может улучшить качество обработки сигналов и осуществить визуализацию силуэта человека.
Устройство 60 обработки тогда оказывается способным оценить расположение возможно искомых предметов на силуэте проверяемого Р, что облегчает дальнейшее фактическое обнаружение этих предметов на человеке.
Таким образом, изобретение позволяет установить местонахождение искомых предметов на человеке, не прибегая к визуализации его/ее контура в обнаженном виде, не затрагивая этических проблем, связанных с использованием микроволнового сканера.
В предпочтительном варианте кабина 10 содержит потолок 13 и пол 12.
В качестве примера, стенки 15 кабины имеют ширину около 80-100 см. Пол 12 по высоте равен высоте ступеньки, а именно около 15 см или менее. Высота прохода составляет по меньшей мере 2 м, а общая высота конструкции достигает от 2,3 м до 2,6 м. Высота самой рамки в предпочтительном случае составляет 5-15 см. Все указанные размеры приведены для примера и не несут ограничительного смысла.
Желательно, чтобы перемещение рамки совершалось с постоянной скоростью 20-60 см/с от корпуса 132 потолка 13 вниз, до корпуса 122 пола 12, и в обратном направлении. Значение скорости приведено для примера и не несет ограничительного смысла.
Согласно фиг.3а1-3а4 и в соответствии с одним из аспектов настоящего изобретения, зондирование с целью досмотра человека Р содержит 4 этапа. На первом этапе человек Р заходит в кабину 10. Далее, рамка совершает движение по направляющим 11 кабины 10 сверху вниз, а затем в обратном направлении - снизу вверх. Наконец, человек выходит из кабины 10.
Потолок 13 содержит корпус 132 для размещения рамки после того, как привод перемещает ее из нижнего положения в верхнее.
Желательно, чтобы в потолке располагался, по меньшей мере, один опорный калибровочный источник 131. Таким образом, после каждого прохода рамки датчики заново подвергаются калибровке.
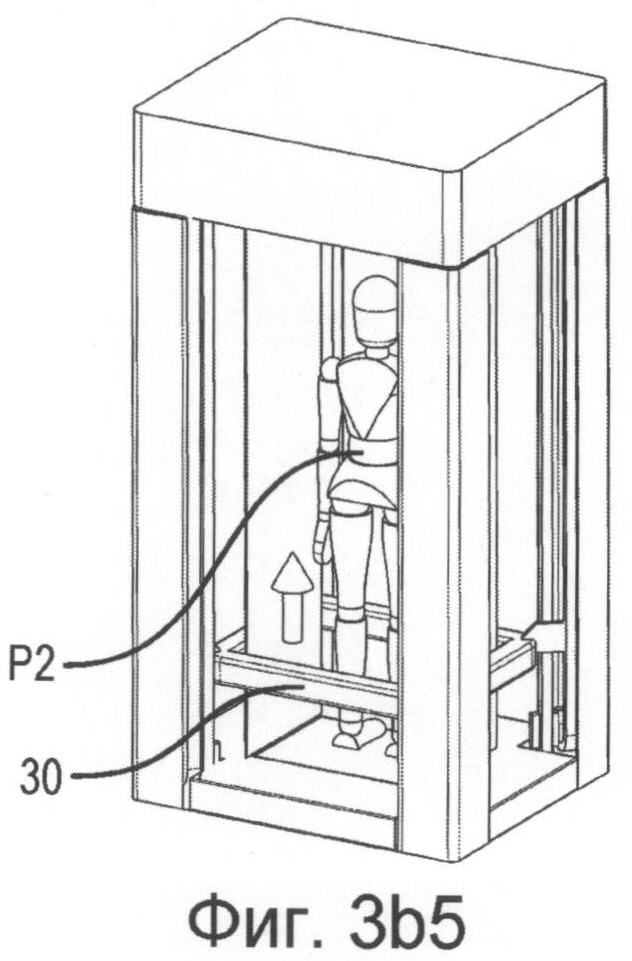
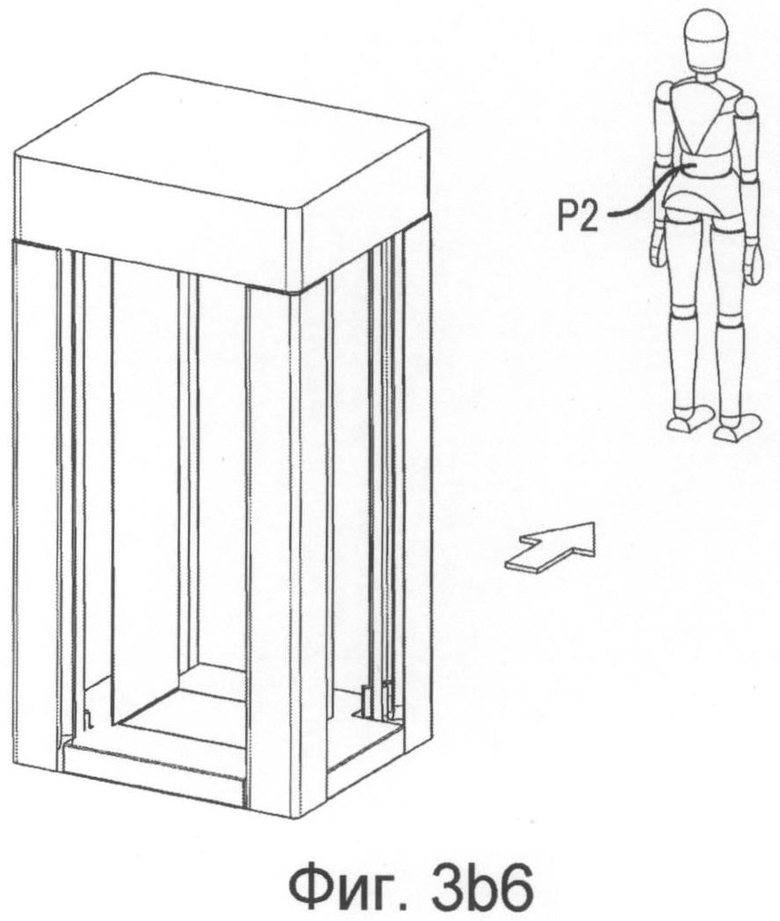
В конструкции, представленной на фиг.3b1-3b6, зондирование первого человека Р1 осуществляется всего лишь за один проход рамки, после чего рамка ожидает в корпусе 122 пола 12 следующего человека Р2, подлежащего досмотру, так что акты зондирования производятся во время чередующихся проходов рамки «сверху-вниз» и «снизу-вверх», чем обеспечивается быстродействие системы.
Желательно, чтобы в полу располагался, по меньшей мере, один опорный калибровочный источник 131.
Например, в случае инфракрасных датчиков в потолке 13 датчикам встретится «холодный» калибровочный источник, а в полу 12 - «горячий» калибровочный источник.
Для обеспечения безопасности процедуры досмотра система содержит средства 14 обнаружения.
В соответствии с первым аспектом средства 14 обнаружения предназначены для выявления того, находится ли человек Р в безопасной зоне, чтобы он не повредил никакой из элементов системы и система не причинила вреда человеку.
В предпочтительном случае зона безопасности представляет собой определенную часть области 33 действия рамки, а именно саму область действия рамки или ее уменьшенную часть; при этом средства 14 обнаружения выполнены с возможностью определения, не подошел ли человек слишком близко к границе области действия рамки, ибо в этом случае человек Р потенциально может повредить рамку 30.
Желательно, чтобы в случае, когда средства 14 обнаружения выдают сигнал обнаружения, средства 70 останавливали процесс перемещения рамки.
Средства 14 обнаружения содержат по меньшей мере один датчик перемещения для обнаружения факта захода человека в область 33 действия рамки и выхода из области действия рамки.
Согласно фиг.6, средства обнаружения могут представлять собой фотоэлектрические барьеры 145, например один на стороне входа, а другой на стороне выхода.
Например, каждый барьер может быть построен из линеек излучателей и приемников. Если во время проведения анализа человек пытается войти в область действия рамки или выйти из области действия рамки, движение рамки будет немедленно остановлено, до тех пор пока не будет вручную нажат сброс на контроллере.
Средства 14 обнаружения могут также содержать датчик 146 присутствия для обнаружения факта слишком близкого подхода человека к кабине 10, при этом рамка 30 также останавливается.
Согласно другому аспекту, зона безопасности является зоной 16 анализа.
Кроме того, процедуру досмотра можно сделать более удобной, если проверяемый Р примет оптимальную позу. Датчикам будет легче обнаруживать искомые предметы на человеке, если, например, он/она поднимет руки и разведет ноги.
Такую оптимальную позу назовем «позой анализа». В соответствии с еще одним аспектом изобретения средства обнаружения дополнительно выполнены с возможностью определения, занимает ли подлежащий досмотру человек Р «позу анализа».
Средства 14 обнаружения выполнены с возможностью формировать результат обнаружения, когда проверяемый Р находится в зоне 16 анализа, так что анализ может начинаться автоматически, когда проверяемый Р оказывается в зоне 16 анализа и/или принимает позу анализа.
Предпочтительно, чтобы средства обнаружения содержали одну или две рукоятки 141-142, предназначенные для захвата рукой человека и гарантирующие, что человек поднимет руки. Рукоятки 141-142 могут содержать контактные датчики для автоматического обнаружения их захвата человеком.
Будет полезно, если средства 14 обнаружения будут также включать в себя по меньшей мере одно взвешивающее устройство для определения присутствия человека в области 33 действия рамки.
Желательно иметь два взвешивающих устройства под двумя указателями 143 положения стоп на заданном расстоянии друг от друга. Таким образом, средства 14 обнаружения смогут определять, развел ли человек Р ноги для процедуры досмотра.
Средства 70 выполняются с возможностью автоматического начала анализа, как только человеком будет принята поза анализа.
Желательно, чтобы средства 70 начинали анализ по прошествии установленного времени задержки после занятия проверяемым позы анализа.
Если проверяемый совершит движение одной или двумя руками или поднимет ногу, перемещение рамки автоматически прекратится.
Таким образом, конструкция системы, в которой имеются два указателя 143 положения стоп и две верхние рукоятки 141-142, требует точной постановки рук и ног человека и поэтому обеспечивает оптимальный анализ при помощи рамки с датчиками, а также обеспечивает максимальную надежность системы и безопасность проверяемого во время движения рамки с датчиками.
Действительно, человеку достаточно поднять ногу или снять одну или обе руки с рукояток, чтобы движение рамки с датчиками прекратилось. И, наоборот, только когда человек удовлетворит всем требованиям правильности положения, рамка 30 с датчиками начнет движение.
В возможном варианте конструкции кабина 10 оснащается металлодетектором 50, например рамкой металлодетектора, представленной на фиг.7. В этом случае устройство обработки может объединять сигналы металлодетектора, вызванные присутствием массы металла, который несет на себе человек, заходящий в кабину 10, с сигналами от множества датчиков 31 с целью получения более полной информации о возможных переносимых предметах.
Сочетание датчиков и рамки 50 металлодетектора позволяет контролеру провести быстрый анализ человека на предмет обнаружения масс металлов, диэлектриков и радиоактивных материалов при помощи одной компактной кабины 10 и одного унифицированного интерактивного устройства 90.
На фиг.9 представлен пункт досмотра, оборудованный системой, соответствующей настоящему изобретению. Задействованная площадь меньше, чем площади, занимаемые пунктами досмотра, который соответствуют существующему уровню техники, и также меньше потребное число контролеров.
Согласно фиг.10, способ досмотра субъекта Р, в соответствии с аспектом настоящего изобретения, содержит этап S1 входа человека в зону анализа; этап S2 перемещения рамки 30 в кабине 10, при этом область 33 действия рамки включает в себя зону 16 анализа; этап S3 сбора информации с множества датчиков 31, расположенных на рамке 30; этап S4 анализа сигналов, представляющих информацию, сформированную множеством датчиков 31; и этап S5 обнаружения (на основе указанных сигналов) присутствия возможных искомых предметов в зоне 16 анализа устройством 60 обработки.
В предпочтительном варианте способ дополнительно содержит этап S6 определения силуэта человека Р посредством устройства 60 обработки и этап S7 оценки местоположения предметов на силуэте посредством устройства 60 обработки, если искомые предметы были обнаружены на этапе S5.

Использование: для досмотра людей с использованием излучения. Сущность изобретения заключается в том, что система для досмотра субъекта (Р) содержит кабину (10), в которой имеется зона (16) анализа, предназначенная для размещения субъекта (Р), подлежащего досмотру, рамку (30), расположенную внутри кабины (10), при этом в рамке имеется полая часть (32), множество датчиков (31), расположенных на рамке (30), причем каждый датчик выполнен с возможностью сбора информации из полой части (32) и формирования сигналов, представляющих указанную информацию, привод (20) для перемещения рамки (30) внутри кабины (10), причем движение полой части (32) при перемещении рамки (30) определяет область (33) действия рамки, при этом указанная зона анализа является частью области действия рамки, устройство (60) обработки для анализа сигналов, сформированных каждым из множества датчиков (31), и для обнаружения, на основе указанных сигналов, возможного присутствия искомых предметов в зоне (16) анализа. Технический результат: обеспечение возможности вести досмотр людей с использованием одновременно множества датчиков при наиболее эффективной геометрии их расположения, минимизируя расстояние между датчиками и поверхностью тела человека, а также обеспечение возможности обнаружения местонахождения искомого предмета на человеке, не получая при этом изображения его/ее контура в обнаженном виде. 2 н. и 27 з.п. ф-лы, 10 ил.
1. Система для досмотра субъекта (Р), отличающаяся тем, что содержит кабину (10), в которой предусмотрена зона (16) анализа для размещения субъекта (Р), подлежащего досмотру; рамку (30), расположенную внутри кабины (10) и имеющую полую часть (32); датчики (31), установленные на рамке (30), причем каждый датчик выполнен с возможностью сбора информации из полой части (32) и с возможностью формирования сигналов, представляющих указанную информацию; привод (20) для перемещения рамки (30) внутри кабины (10), причем движение полой части (32) при перемещении рамки (30) определяет область (33) действия рамки, а зона анализа является частью области действия рамки; устройство (60) обработки, выполненное с возможностью анализа сигналов, сформированных каждым из датчиков (31), и с возможностью обнаружения, на основе указанных сигналов, возможного присутствия искомых предметов в зоне (16) анализа.
2. Система по п.1, отличающаяся тем, что содержит по меньшей мере один опорный калибровочный источник (С) для повторной калибровки по меньшей мере одного из датчиков (31).
3. Система по п.1, отличающаяся тем, что датчики (31) размещены на рамке (30) таким образом, что при перемещении рамки они зондируют всю поверхность субъекта, с головы до пят, если субъект (Р) стоит целиком внутри зоны (16) анализа.
4. Система по п.1, отличающаяся тем, что кабина (10) содержит одну или более направляющих (11) для ведения рамки (30) по вертикальной траектории, когда производится перемещение рамки (30) приводом (20).
5. Система по п.1, отличающаяся тем, что кабина (10) содержит потолок (13), имеющий верхний корпус (132) для размещения рамки, причем привод (20) выполнен с возможностью перемещения рамки внутрь верхнего корпуса (132).
6. Система по п.5, отличающаяся тем, что потолок (13) содержит по меньшей мере один верхний опорный калибровочный источник (131) для повторной калибровки по меньшей мере одного из датчиков (31), когда рамка (30) находится в верхнем корпусе (132).
7. Система по п.1, отличающаяся тем, что кабина (10) содержит пол (12), имеющий нижний корпус (122) для размещения рамки (30), причем привод (20) выполнен с возможностью перемещения рамки внутрь нижнего корпуса (122).
8. Система по п.7, отличающаяся тем, что пол (12) содержит по меньшей мере один нижний опорный калибровочный источник (131) для повторной калибровки по меньшей мере одного из датчиков (31), когда рамка (30) находится в нижнем корпусе (122).
9. Система по любому из предшествующих пунктов, отличающаяся тем, что содержит средства (14) обнаружения, выполненные с возможностью выявления, находится ли субъект (Р), подлежащий досмотру, целиком внутри конкретной части области (33) действия рамки.
10. Система по п.9, отличающаяся тем, что привод (20) выполнен с возможностью остановки перемещения рамки (30) в случае, если средства (14) обнаружения выявляют, что субъект (Р) не находится целиком внутри конкретной части области (33) действия рамки.
11. Система по п.9, отличающаяся тем, что средства (14) обнаружения дополнительно выполнены с возможностью выявления, находится ли субъект (Р), подлежащий досмотру, внутри зоны (16) анализа.
12. Система по п.11, отличающаяся тем, что содержит средства (70) управления датчиками (31) и приводом (20), причем средства (14) обнаружения дополнительно выполнены с возможностью формирования результата обнаружения, когда субъект (Р), подлежащий досмотру, находится внутри зоны (16) анализа, так что анализ может начинаться автоматически, когда субъект (Р) оказывается в зоне (16) анализа.
13. Система по п.9, отличающаяся тем, что средства (14) обнаружения дополнительно выполнены с возможностью выявления, находится ли субъект (Р), подлежащий досмотру, в позе анализа.
14. Система по п.13, отличающаяся тем, что содержит средства (70) управления датчиками (31) и приводом (20), причем средства (14) обнаружения дополнительно выполнены с возможностью формирования результата обнаружения, когда субъект (Р), подлежащий досмотру, находится в позе анализа, так что анализ может начинаться автоматически, когда субъект (Р) оказывается в позе анализа.
15. Система по п.9, отличающаяся тем, что средства (14) обнаружения содержат одну или две рукоятки (141, 142), выполненные с возможностью захвата субъектом (Р), подлежащим досмотру, для обеспечения, чтобы субъект (Р) поднимал руки для облегчения досмотра.
16. Система по п.9, отличающаяся тем, что кабина (10) содержит пол (12), при этом средства (14) обнаружения содержат, по меньшей мере, одно взвешивающее устройство (144) для установления присутствия субъекта (Р) в области (33) действия рамки.
17. Система по п.9, отличающаяся тем, что кабина (10) содержит пол (12), при этом средства (14) обнаружения содержат, по меньшей мере, один указатель положения стопы на полу (12).
18. Система по п.16 или 17, отличающаяся тем, что средства (14) обнаружения содержат два указателя положения стопы на полу (12) и по одному взвешивающему устройству под каждым из указателей положения стопы для обеспечения, чтобы субъект (Р), подлежащий досмотру, разводил ноги для облегчения досмотра.
19. Система по п.9, отличающаяся тем, что средства (14) обнаружения содержат по меньшей мере один датчик (145) движения для выявления входа субъекта в область (33) действия рамки или выхода из указанной области.
20. Система по п.1, отличающаяся тем, что рамка (30) имеет по существу прямоугольную форму.
21. Система по п.1, отличающаяся тем, что рамка (30) имеет по существу круговую форму.
22. Система по п.1, отличающаяся тем, что положение рамки (30) является по существу горизонтальным.
23. Система по п.1, отличающаяся тем, что датчики (31) выполнены с возможностью сбора информации о нескольких физических величинах, причем датчики (31) включают по меньшей мере один из следующих датчиков: пассивный индуктивный датчик (311), активный индуктивный датчик (312), пассивный микроволновый датчик (313), активный микроволновый датчик (314), инфракрасный датчик (315), датчик гамма-излучения (316), при этом устройство (60) обработки выполнено с возможностью объединения сигналов, сформированных датчиками (31), и/или вычисления их взаимной корреляции.
24. Система по п.23, отличающаяся тем, что датчики также содержат по меньшей мере один оптический датчик (317) для определения расстояния между рамкой (30) и субъектом (Р), подлежащим досмотру, при этом устройство (60) обработки выполнено с возможностью определения силуэта субъекта (Р), подлежащего досмотру, когда рамка (30) перемещается посредством привода (20).
25. Система по п.24, отличающаяся тем, что устройство (60) обработки выполнено с возможностью оценивания местоположения возможных искомых предметов на силуэте субъекта (Р).
26. Система по п.1, отличающаяся тем, что содержит металлодетектор (50).
27. Система по п.1, отличающаяся тем, что кабина (10) содержит по меньшей мере одну стенку (15), расположенную в области (33) действия рамки.
28. Способ досмотра субъекта (Р), отличающийся тем, что содержит:
- этап (S1) входа субъекта в зону (16) анализа кабины (10);
- этап (S2) перемещения рамки (30) внутри кабины, при этом траектория движения полой части (32) определяет область (33) действия рамки, которая включает в себя зону (16) анализа;
- этап (S3) сбора информации с датчиков (31), расположенных на рамке (30);
- этап (S4) анализа сигналов, представляющих информацию, сформированную датчиками (31); и
- этап (S5) обнаружения, выполняемый устройством (60) обработки на основе указанных сигналов, присутствия возможных искомых предметов в зоне (16) анализа.
29. Способ по п.28, отличающийся тем, что дополнительно содержит:
- этап (S6) определения силуэта субъекта (Р) посредством устройства (60) обработки и
этап (S7) оценки местоположения предметов на силуэте посредством устройства (60) обработки в случае обнаружения искомых предметов.
| US 20070114418A1, 24.05.2007 | |||
| US 20050231421A1, 20.10.2005 | |||
| US 20040012398A1, 22.01.2004 | |||
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ПРЕДМЕТОВ, СКРЫТЫХ ПОД ОДЕЖДОЙ ЛЮДЕЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2133971C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ВЗРЫВЧАТЫХ ВЕЩЕСТВ | 2004 |
|
RU2283485C2 |
| US 20050104603A1, 19.05.2005 | |||

