Изобретение относится к самоходным машинам, предназначенным для проделывания проходов в минных полях и разминирования местности.
Известны машины для разминирования, содержащие катки-волокуши, прикрепляемые к танкам и другим бронированным машинам (RU 2146799, F41H 11/12, 20.03.2000).
Эти машины подвержены воздействию поражающих факторов, не гарантируют безопасность экипажа и защиту машины, а также громоздки, маломаневренны.
Известны машины с Катковыми минными тралами, у которых катковые секции размещены по одной перед каждой гусеничной лентой бронированной базовой машины (танка), связаны с несущими рамами, прикрепленными к базовой машине посредством нижних шарнирных кронштейнов и поддерживающих тросов (RU 2146799, F41H 11/12, 20.03.2000), а также специальные машины с укрепленным днищем корпуса, обеспечивающие защиту экипажа и машины (RU 2111441, F41H 5/00, F41H 7/00, 1994).
Эти устройства могут использоваться только в качестве индивидуального средства защиты самой машины от мин нажимного принципа действия при выполнении задач по преодолению минных заграждений и не обеспечивают сплошного разминирования местности, а также имеют низкую взрывоустойчивость и ограниченный ресурс эксплуатации.
Известна также установка разминирования, содержащая двухколесное дистанционно управляемое транспортное средство с приводом в виде мотор-колес и автономным источником питания в виде аккумуляторной батареи, систему видеонаблюдения и пульт дистанционного управления. Между колесами установлена втулка, вокруг которой обернут удлиненный заряд (US 8714069 B1, F41H 11/16, 06.05.2014).
Данная установка позволяет дистанционно развертывать удлиненный линейный заряд и осуществлять его подрыв, обеспечивая проходы в минных полях. К ее недостаткам относятся ограниченная область применения, обусловленная низкой проходимостью двухколесного транспортного средства, а также отсутствие защиты оператора.
Целью настоящего изобретения является устранение указанных проблем путем создания установки разминирования, обладающей повышенной защищенностью, живучестью и эффективностью выполнения задач разминирования, а также обеспечение автоматизации и возможности ее применения для решения более широкого круга этих задач.
Техническим результатом предложенного изобретения является повышение живучести установки разминирования, безопасности экипажа и эффективности выполнения задач разминирования.
Указанная цель достигается применением автоматизированного устройства с ходовой частью повышенной проходимости, имеющей аккумуляторный источник питания, гидравлическое силовое устройство, сканер для поиска металлизированных мин, устройства управления этими сборочными устройствами, видеопередающее устройство, видеокамеры с инфракрасной подсветкой. Ходовая часть выполнена на базе шагового механизма с колесами повышенной проходимости и подвижным прицепным механизмом для сцепки с удлиненными зарядами разминирования с прикрепленными колесами.
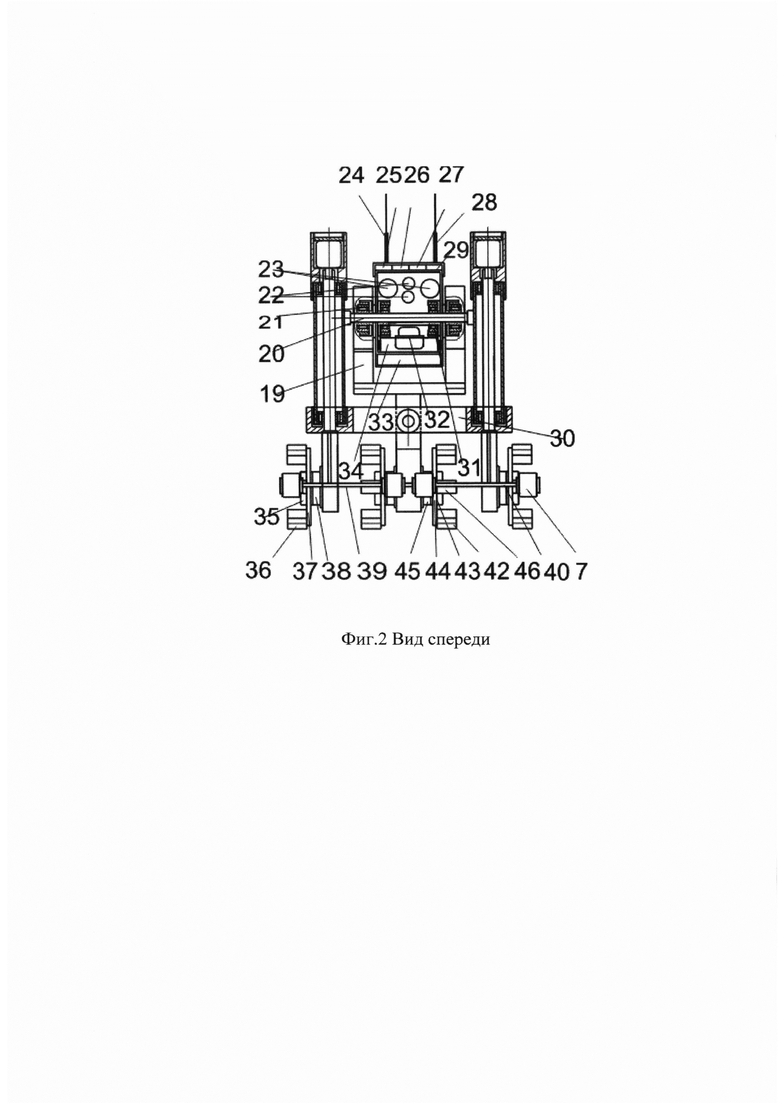
На фиг. 1 изображен вид сбоку устройства разминирования, а на фиг. 2 - вид спереди. Устройство содержит: корпус 1, вращающийся на подшипниках 31, 41, в котором размещена аккумуляторная батарея 33, блок сканирования и анализа 29, связанный с металлоискателем 6 и сканирующими устройствами 39, 40 с колесиками 7, шарнирно связанные с поперечной балкой 30, жестко связывающей пару передних ног 3, блок управления гидроприводом 27 с контролером, включающим емкость с веретенным маслом 34 и гидравлический насос 32 с перепускными клапанами, закрепленными на днище корпуса 1, блок управления 26 электроприводами с двигателями поворота 18, размещенные в стойках передних ног 3, связанных с валами 4 на подшипниках 5, 17 поворота передних колес 8, радиоблок 25, содержащий приемник с антенной 24 и передатчик видеосигналов с антенной 28, видеокамеры 23 с инфракрасной подсветкой 22, вал 20 передних ног 3, вращающийся на подшипниках 21, установленных в приливах 2 вилки 19, заднюю ногу 16, колеса 37 с обрезиненными пальцами 36 и тормозной муфтой 35, установленные в нижней части на осях двигателей постоянного тока 38, гидравлический цилиндр 9, установленный в средней части на шарнирах, подвижно соединяющий заднюю ногу 16 с передними 3, задние колеса 10 с датчиками движения 46 и дисками 44 с обрезиненными пальцами 42 и тормозными колодками 43, установленными в нижней части на осях 45, удлиненный заряд 14 на колесах 13, соединенный в приливе вилки 12 задней ноги 16 пальцем 11 электромагнитного замка 15.
Работает устройство следующим образом. Аккумуляторная батарей 33 устанавливается в гнездо корпуса 1. Перед началом работы установки разминирования к вилке 12 прилива задней ноги 16 устанавливается удлиненный заряд 14 (или боекомплект зарядов) на колесах 13 и стопорится электромагнитным замком 15.
Устройство разминирования управляется дистанционно по радиоканалу через запрограммированный контролер в блоке управления гидроприводом 27. Контроллер координирует работу всех составных частей устройства разминирования, осуществляя информационное взаимодействие с ними по шине CAN.
Перед движением устройства разминирования включается блок сканирования и анализа 29 и металлоискатель 6 со сканирующими устройствами 39, 40. С началом движения информация с видеокамер 23 отображается на мониторе оператора. Величина пройденного пути фиксируется датчиком движения 46. Сканирующее устройство регистрирует наличие мин на местности.
Сигналы управления движением устройства разминирования по шине CAN поступают на блок управления гидроприводом 27 с контролером и приводит в действие гидравлический цилиндр 9, осуществляющий возвратно-поступательное движение передних 3 и задней ноги 16. Движение производится следующим образом. Гидравлический насос с перепускными клапанами 32 приводит в действие гидравлический цилиндр 9, осуществляющий возвратно-поступательные движения. При поступательном перемещении штока гидравлического цилиндра 9 он через шарнирное соединение поперечной балкой вилки 30 двигает передние ноги 3, которые поворачиваются в подшипниках 21 и перемещаются на колесах 8, увеличивая угол раствора между передними 3 и задним ногами 16. Одновременно с помощью тормозной муфты 35 задняя нога не перемещается от вращения колеса 10. При возвратном движении в упор с помощью тормозной муфты устанавливаются передние ноги 16, а задняя нога вращается на подшипниках 21 и передвигается вперед вращением колеса 10. Тормозная муфта 35 имеет свободное вращение в одну сторону, а в другую заторможена. Попеременно передвигая ноги устройство двигается вперед с помощью гидравлического привода и соответственно на сцепке тянет удлиненный заряд 14 на колесиках 13. На конечной точке маршрута срабатывает магнитный замок 15, освобождая устройство от удлиненного заряда 14 и оно под управлением оператора перемещается в укрытие, а заряд 14 дистанционно подрывается обеспечивая проход в минном поле.
Применение устройства разминирования позволит уменьшить его габариты, что обеспечит скрытность на поле боя. Управление передними колесами увеличивает маневренность устройства, а гидравлическая тяга повышает тянущее усилие на сцепке с удлиненным зарядом. Наличие блоков управления и анализа информации позволяет управлять устройством в автоматизированном режиме при заданных параметрах маршрута и целеуказания. Колеса с пальцами повышают сцепление с грунтом и увеличивают проходимость устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходное бронированное транспортное средство обеспечения разминирования и подготовки объектов к разрушению и крепление для установки навесного оборудования | 2017 |
|
RU2648659C1 |
| УСТАНОВКА РАЗВЕРТЫВАНИЯ ЛИНЕЙНЫХ ЗАРЯДОВ РАЗМИНИРОВАНИЯ (ВАРИАНТЫ) | 2019 |
|
RU2699165C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| ПРОТИВОТАНКОВАЯ МИНА РОБОТИЗИРОВАННАЯ | 2023 |
|
RU2823707C1 |
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| МНОГОЦЕЛЕВОЕ ПРОТИВОТАНКОВОЕ (ЗЕНИТНОЕ) СРЕДСТВО | 2011 |
|
RU2492402C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |

Изобретение относится к самоходным машинам для проделывания проходов в минных полях и разминирования местности. Устройство разминирования содержит корпус, в котором размещена аккумуляторная батарея. Устройство дополнительно имеет блок сканирования и анализа, блок управления гидроприводом с контролером, блок управления электроприводами с двигателями поворота, радиоблок, видеокамеры с инфракрасной подсветкой, вал передних ног, заднюю ногу, колеса с обрезиненными пальцами и тормозной муфтой, гидравлический цилиндр, подвижно соединяющий заднюю ногу с передними, задние колеса с датчиками движения и дисками, удлиненный заряд на колесах, соединенный в приливе вилки задней ноги пальцем электромагнитного замка. Достигается уменьшение габаритов устройства разминирования, увеличение маневренности. 2 ил.
Устройство разминирования, содержащее корпус, вращающийся на подшипниках, в котором размещена аккумуляторная батарея, отличающееся тем, что имеет: блок сканирования и анализа, связанный с металлоискателем и сканирующими устройствами с колесиками, шарнирно связанные с поперечной балкой, жестко связывающей пару передних ног, блок управления гидроприводом с контролером, включающим емкость с веретенным маслом и гидравлический насос с перепускными клапанами, закрепленными на днище корпуса, блок управления электроприводами с двигателями поворота, размещенные в стойках передних ног, связанных с валами на подшипниках поворота передних колес, радиоблок, содержащий приемник с антенной и передатчик видеосигналов с антенной, видеокамеры с инфракрасной подсветкой, вал передних ног, вращающийся на подшипниках, установленных в приливах вилки, заднюю ногу, колеса с обрезиненными пальцами и тормозной муфтой, установленные в нижней части на осях двигателей постоянного тока, гидравлический цилиндр, установленный в средней части на шарнирах, подвижно соединяющий заднюю ногу с передними, задние колеса с датчиками движения и дисками с обрезиненными пальцами и тормозными колодками, установленными в нижней части на осях, удлиненный заряд на колесах, соединенный в приливе вилки задней ноги пальцем электромагнитного замка.
| US 8714069 B1, 06.05.2014 | |||
| РОБОТ-САПЕР | 2008 |
|
RU2405122C2 |
| CN 107671868 A, 09.02.2018 | |||
| US 4621562 A1, 11.11.1986. | |||

