Группа изобретений относится к машиностроению, к конструкциям малогабаритных мобильных роботов с дистанционным управлением, предназначенных для охраны различных объектов.
Известны способ защиты охраняемой акватории от подводных диверсантов и автономный необитаемый подводный аппарат для защиты охраняемой акватории от подводных диверсантов, включающий прочный герметичный корпус, двигательно-движительный комплекс, автономный источник энергии, приборы управления, связи, обнаружения и классификации объектов и средства их поражения (см. патент на изобретение РФ №2269449, B63G 8/00, оп. в 2006 г.). Этот аппарат выполняет функции подводного мобильного робота, осуществляет подводную разведку, передает оператору полученную информацию и при необходимости уничтожает обнаруженные объекты. Однако это техническое решение не предназначено для сухопутных условий.
Известен дистанционно управляемый робот радиационной разведки, содержащий опорную раму, систему видеоконтроля, состоящую из трех телекамер, при этом транспортное средство выполнено в виде многоколесного шасси со встроенным в каждое колесо мотор-редуктором, передние колеса закреплены на жестком рычаге, качающемся вокруг продольной оси шасси, а задние колеса каждого борта закреплены на двух качающихся поперечных рычагах шасси, в корме шасси установлена аккумуляторная батарея, на раме расположены радиомодем и телевизионный передатчик, одна из телекамер установлена с возможностью вращения, пульт оператора содержит модуль управления, блок питания, аккумуляторную батарею, микроЭВМ, видеомонитор, радиомодем и телевизионный приемник (см. патент на полезную модель РФ №82871, G01T 1/169, оп. в 2009 году). В этом патенте не решалась проблема разработки бронированного, защищенного мобильного робота. Известное устройство имеет маневренное шасси, но решает задачу только радиационной разведки, поэтому не оснащено орудийными системами.
Известно использование элетромоторов-колес в шасси мобильного транспортного оборудования (см. патент на изобретение РФ №2291811, B62D 61/00, оп. в 2007 г.). Это техническое решение имеет сложную, громоздкую конструкцию, которую невозможно использовать в компактных мобильных роботах.
Известен следящий приемник широкополосного сигнала с высоким уровнем помехоустойчивости (см. патент на изобретение РФ №2157052, Н04В 7/00, оп. в 2000 году). В данном патенте не рассмотрен вопрос практического использования на мобильных устройствах.
Известна система автоматического возврата самоходного робота к зарядному устройству (см. патент на изобретение РФ №2306591, G05B 19/00, оп. в 2007 году). В этом патенте описан робот-уборщик, работающий на аккумуляторе. Возникающая проблема своевременного возврата самоходного робота к зарядному устройству решена оригинальным способом благодаря использованию инфракрасного модуля.
Известна боевая система, содержащая дистанционно управляемое стрелковое оружие, видеокамеру наведения, закрепленную на оружии, приводы вертикального и горизонтального перемещения оружия, привод спускового механизма, соединенные каналом связи с контроллером оружия и далее с бортовым компьютером и бортовым приемно-передающим устройством с бортовой антенной, которое соединено каналом связи через управляющее приемно-передающее устройство с управляющим компьютером, имеющим монитор и устройство управления, например «джойстик», видеокамеру, при этом дистанционно-управляемое стрелковое оружие установлено на мобильной установке (см. патент на изобретение РФ №2345313, МПК F41H 13/00, оп. в 2009 году). Описанная в данном патенте боевая система решает узкую задачу - обеспечения дистанционного управления стрелковым оружием.
Известен мобильный робот, содержащий размещенные в корпусе устройства для перемещения робота, блок обнаружения препятствия, блок определения текущего местоположения робота, блок наблюдения за пространством перед роботом, блок управления, источник питания, видеокамеры наблюдения, при этом перемещающееся средство имеет размещенные на нем станцию мобильной связи, выполненной с возможностью доступа в ИНТЕРНЕТ, пульт дистанционного управления, выполненный в виде персонального компьютера, соединенного информационным каналом со станцией мобильной связи, устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством, на осях ведущих колес самодвижущейся тележки размещены приводные элементы двигателей постоянного тока, на дисках ведомых колес самодвижущейся тележки установлены фотоимпульсные датчики, соединенные выходами со входами блока определения пройденного роботом расстояния, и акселерометры, подключенные выходами ко входам блока измерения ускорения при движении робота, блок обнаружения препятствия снабжен передатчиком и приемником ультразвукового сигнала (см. патент на изобретение РФ №2274543, МПК B25J 5/00, оп. в 2006 году). Этот мобильный робот относится к робототехнике и предназначен для отработки методов управления, анализа состояния пространства перед роботом и над ним, измерения ускорения при движении, получения изображения с видеокамеры и его сохранения, получения трехмерного изображения робота в реальном масштабе времени при его движении по поверхности. Он может использоваться для диагностики трубопроводов, скрытых полостей, подземных коммуникаций при наличии неагрессивной среды. Данное техническое решение не решает задачу практического применения мобильного робота для разведывательных, охранных и боевых целей.
Известна бронированная зенитная пушечно-ракетная сочлененная машина, содержащая три шарнирно связанные между собой секции, крайние из которых включают ходовую часть, а центральная размещена между ними в подвешенном состоянии, при этом центральная секция снабжена подвижными опорами и мотор-колесным двигателем и выполнена с возможностью автоматического расчленения от крайних посредством введенных автоматических сцепных устройств, причем каждая из секций выполнена с возможностью автономного функционирования (см. патент на изобретение РФ №2155314, F41H 7/00, оп. в 2000 году). Центральная (боевая) секция этой машина имеет поворотную башенную установку с размещенным на ней вооружением, приводами его наведения, радиолокационными и оптико-электронными информационными системами обнаружения и сопровождения, аппаратурой управления и боевым расчетом. Перемещение боевой секции на местности при занятии огневой позиции производится на мотор-колесах. Установка боевой секции на огневой позиции, подъем и опускание ее при расцеплении или сцеплении с транспортными секциями осуществляется при помощи гидравлических домкратов. Эта машина оригинальной конструкции не предназначена для работы в режиме дистанционного управления. А сложная система монтажа-демонтажа резко снижает эффективность ее применения в условиях быстрого реагирования.
Известна система защиты самодвижущегося бронированного устройства, например бронированного автомобиля, включающая радиоэлектронный блок обнаружения угроз, блок обнаружения направления угрозы, блок осуществления ответного удара с зарядами, находящимися в контейнере (см. патент Франции на изобретение FR №2936046, МПК F41H 11/02, оп. в 2010 г.). Эта система предназначена для сканирования пространства с помощью улавливания волн Маха на предмет обнаружения внешних угроз для самодвижущегося транспортного средства и уничтожения этой угрозы. Это сложная система не может обеспечить высокой достоверности обнаружения угроз, радиус ее действия ограничен и подвержен внешним помехам.
Наиболее близким техническим решением к заявленной группе изобретений является очень компактный боевой радиоуправляемый робот на маневренной колесной базе, включающий бронированный корпус, камеры видеонаблюдения и оружие с системой радиоуправляемого наведения (см. сайт http://mobbit.info/item/2010/11/15/mega-hurtz-tactical-robot-boevoi-radioypravlyaemyi-robot-dlya-voennyh-celei-video, оп. 15.11.2010 г.). Известное техническое решение предназначается для использования в военных и охранных целях, поисковых и спасательных операциях. Этот миниробот предназначен для работы на небольшом расстоянии от оператора, имеет очень простую конструкцию и практически не защищен от попадания снарядов противника.
Настоящее изобретение направлено на решение технической задачи: повышения надежности и эксплуатационных характеристик дистанционно управляемого мобильного робота при повышении его универсальности, расширения технических возможностей мобильного робота, увеличения маневренности и быстроходности его ходовой системы при повышении уровня его защищенности.
Решение поставленной технической задачи достигается тем, что в дистанционно управляемом мобильном роботе, содержащем бронированный корпус с поворотной башенной установкой и ходовой системой, включающей электромоторы-колеса, автономный источник энергии, системы автоматического наружного слежения, блоки управления, расположенные на мобильном роботе, и дистанционную систему управления, поворотный механизм башенной установки выполнен в виде высокомоментного электромотора, включающего расположенный на верхней площадке бронированного корпуса стол с обмоткой статора, закрепленной в столе, и корпуса ротора, расположенного во внутренней полости стола и связанного со столом посредством шаровых подшипников, причем в корпусе ротора расположены постоянные магниты с возможностью взаимодействия с обмоткой статора, при этом ходовая система снабжена телескопическими стойками элетромоторов-колес, снабженными дополнительными электромоторами, причем системы автоматического наружного слежения выполнены в виде панорамно расположенных на корпусе мобильного робота и на башне видеокамер и в виде звукоприемной системы самонаведения, включающей широкополосный приемник сигналов звуковой частоты с расположенными по периметру башни микрофонами направленного действия. Обмотка статора закреплена в верхней зоне стола, а постоянные магниты корпуса ротора расположены в его верхней зоне. Постоянные магниты корпуса ротора выполнены из редкоземельных металлов. Дополнительные электромоторы телескопических стоек выполнены в виде вертикально расположенного в нижней зоне телескопических стоек ротора с возможностью взаимодействия с постоянными магнитами статора, установленного в кожухе электромотора-колеса с защитной крышкой. Колеса ходовой системы, установленные на дисках, выполнены в виде покрышки, заполненной пористым материалом, например вспененной резиной, а центральная часть колеса с расположенным в ней электромотором с внешней стороны снабжена бронированным колпаком. Бронированный корпус выполнен из керамических пластин. Мобильный робот снабжен боевым устройством для выстрелов сферическими гранатами, включающим ствол с механизмом изменения его положения, установленный на башне, и расположенные внутри корпуса мобильного робота колбы со сферическими гранатами, снабженные винтовыми распределителями, связанные с винтовым конвейером для подачи сферических гранат к пусковому механизму. Ствол боевого устройства снабжен устройством защиты, расположенным на его выходном конце и выполненным в виде поворотных створок с приводом. Боевое устройство для выстрелов сферическими гранатами снабжено расположенными на кронштейнах ствола видеокамерами и лазерным указателем цели. Мобильный робот снабжен дополнительным боевым устройством, расположенным в задней зоне корпуса и включающим контейнер с отсеками для зарядов типа РПГ-2, при этом каждый отсек контейнера снабжен защитными поворотными крышками, расположенными на входной и выходном концах отсеков, а контейнер расположен на телескопической раме и снабжен приводом приведения в боевое положение и приводом системы наведения, причем дополнительное боевое устройство снабжено расположенными внутри корпуса мобильного робота блоками зарядов с поворотными держателями. Мобильный робот снабжен установленной на контейнере дополнительного боевого устройства видеокамерой наведения. Мобильный робот снабжен пулеметами, расположенными на общем кронштейне со стволом боевого устройства. Мобильный робот снабжен автоматами, расположенными на общем кронштейне со стволом боевого устройства. Видеокамеры мобильного робота снабжены защитными элементами.
А также тем, что в видеокамере мобильного робота, включающей расположенный в кожухе объектив, кожух снабжен защитными передвижными бронированными шторками, при этом кожух дополнительно снабжен набором сменных стекол для объектива с механизмом замены поврежденного стекла объектива.
А также тем, что в звукоприемной системе самонаведения мобильного робота, включающей широкополосный приемник сигналов звуковой частоты с расположенными по периметру башни микрофонами направленного действия, микрофоны направленного действия расположены в три ряда по периметру башни, при этом звуковые каналы микрофонов в нижнем ряду расположены горизонтально, в среднем ряду - с наклоном к линии горизонта под небольшим углом, а звуковые каналы верхнего ряда микрофонов расположены с наклоном от 45° до 75°.
А также тем, что в сферической гранате, включающей расположенный во фторопластовой оболочке шарообразный металлический слой, выполненный, например, из стальной крошки, в полости шарообразного металлического слоя расположен шарообразный слой взрывчатого вещества с внутренней полостью, связанной с наружным воздухом посредством воздуховодов, проходящих насквозь через слои и оболочку, причем в полости шарообразного слоя взрывчатого вещества по его периметру на концах воздуховодов расположены датчики давления воздуха с капсюлями, при этом во внутренней полости шарообразного слоя взрывчатого вещества расположен взрыватель, выполненный с возможностью активирования под большим давлением воздуха при движении сферической гранаты по стволу.
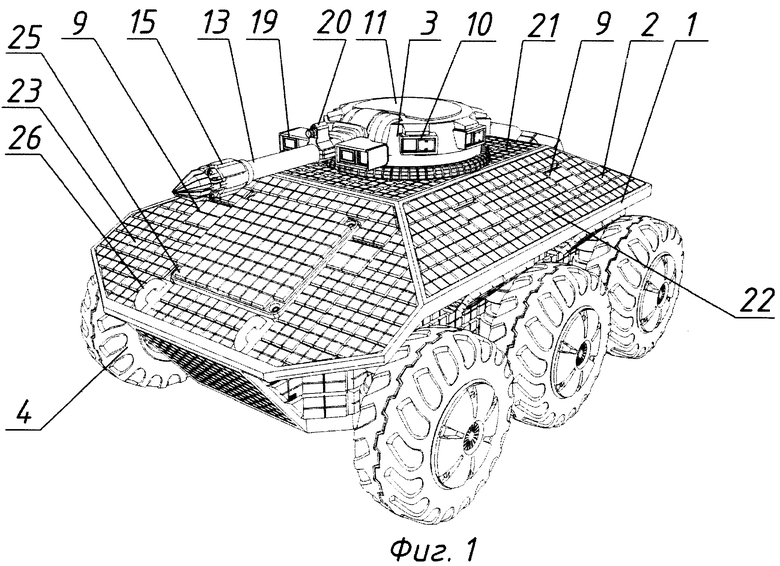
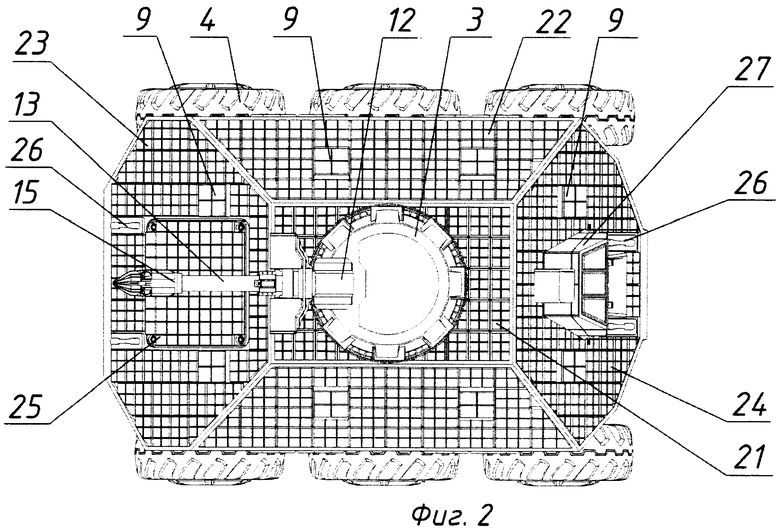
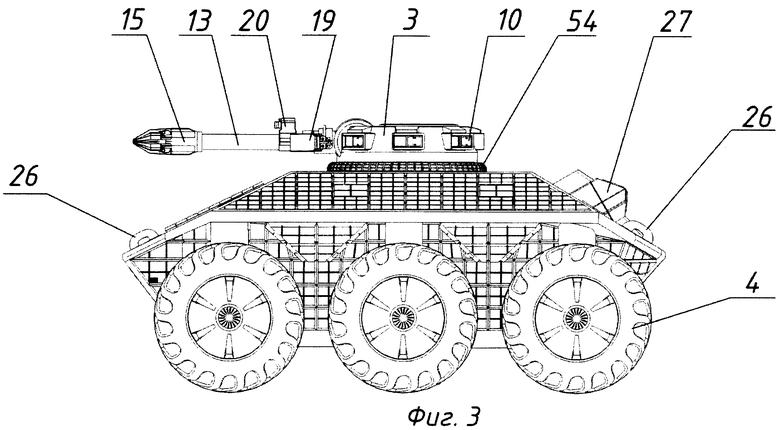
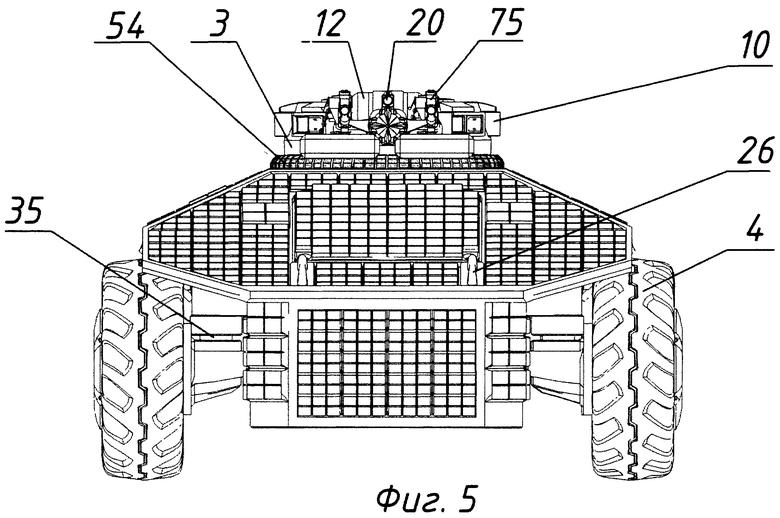
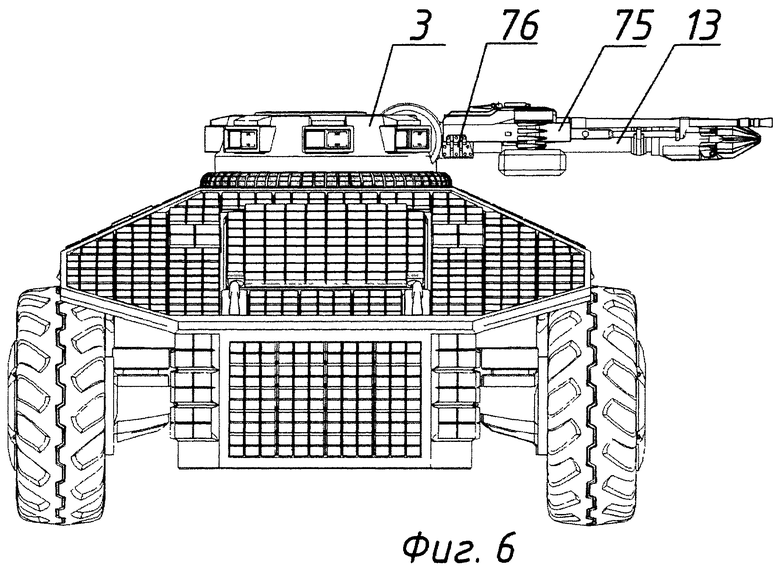
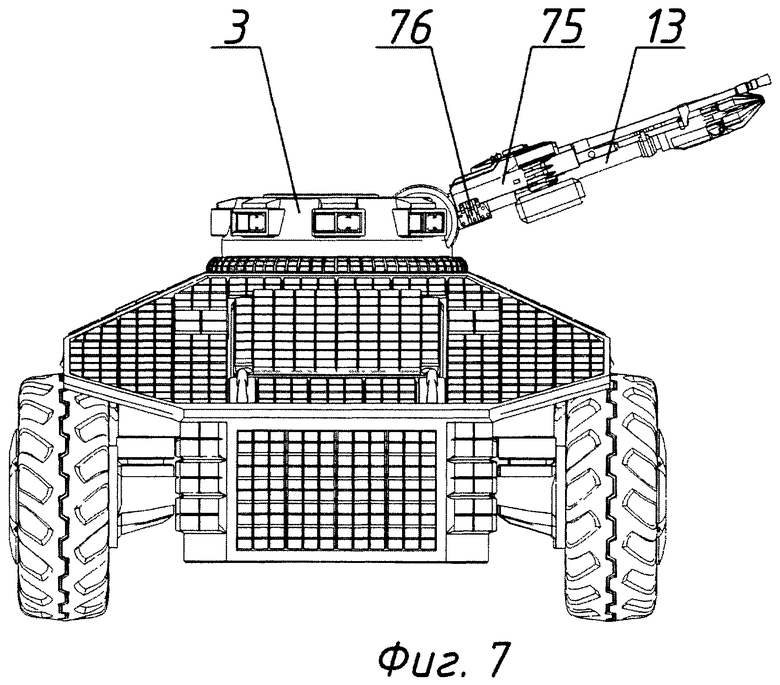
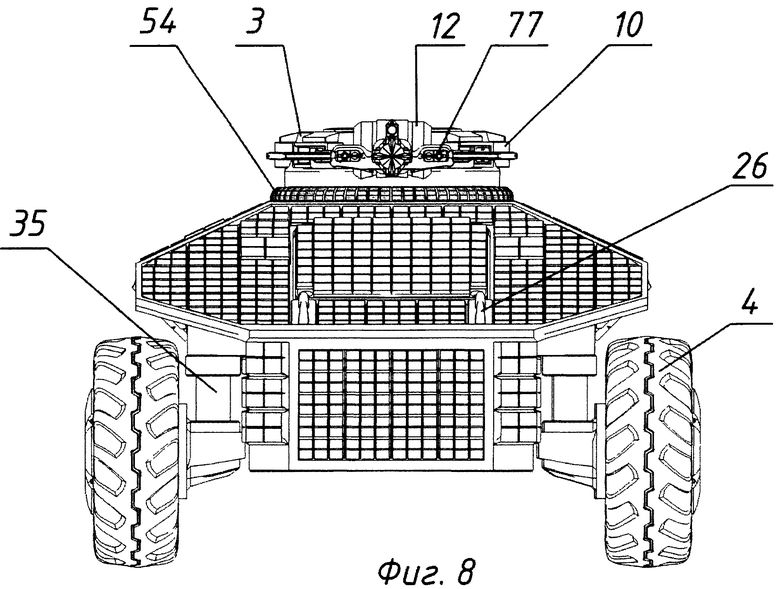
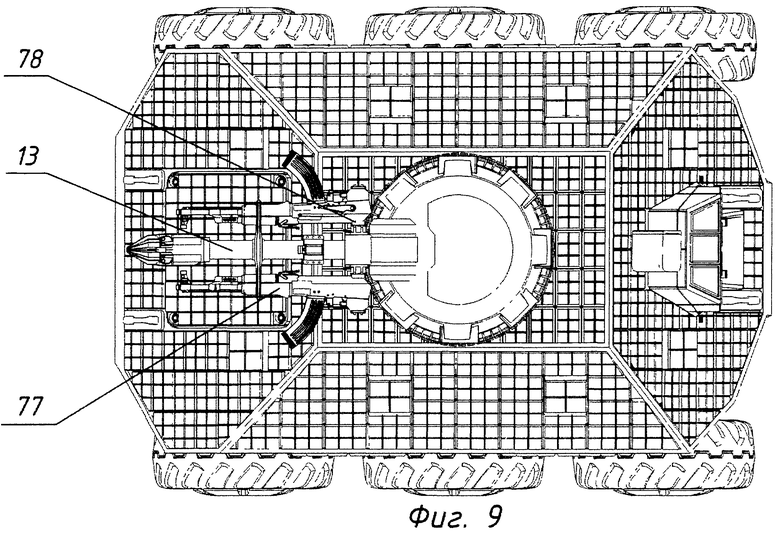
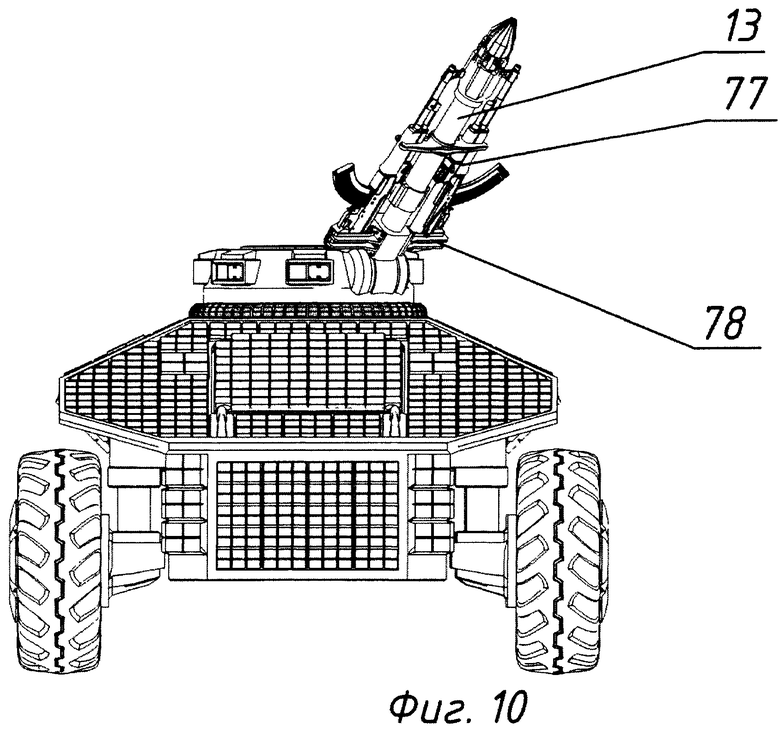
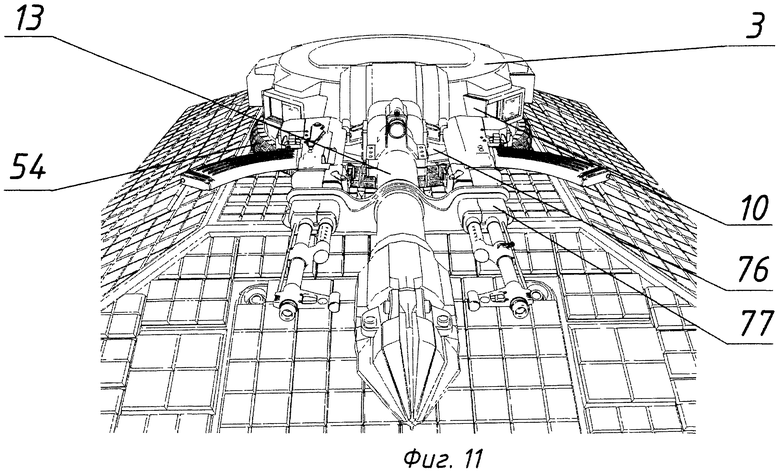
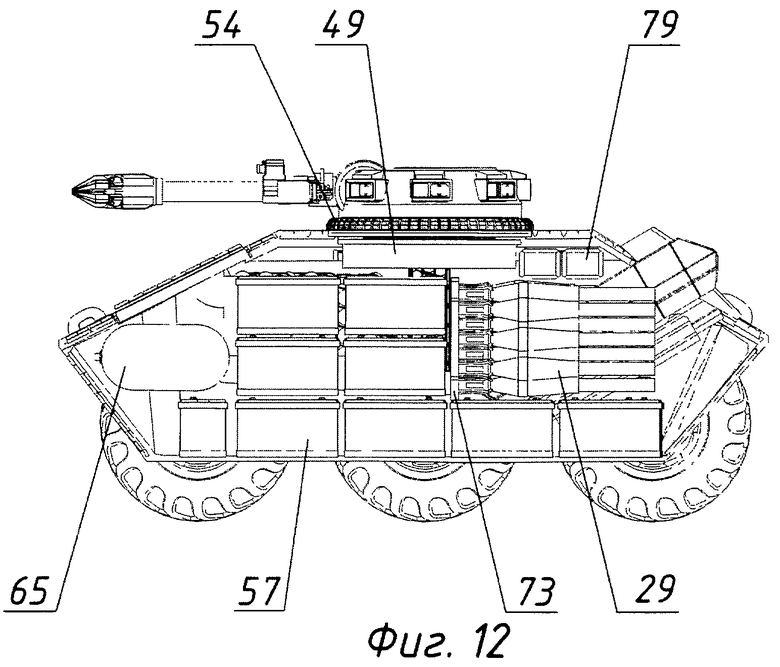
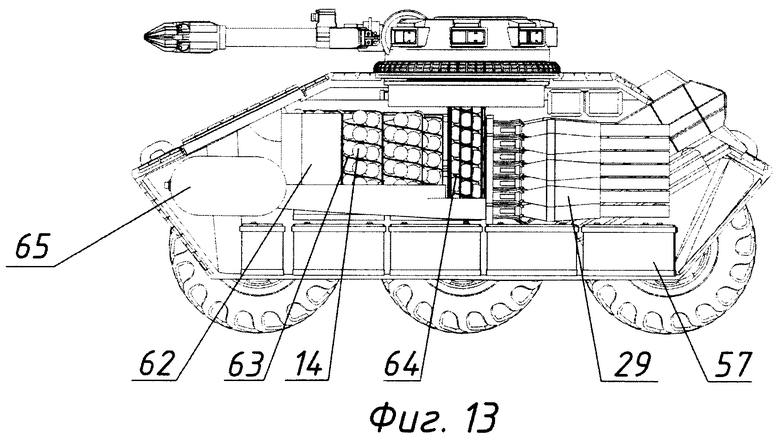
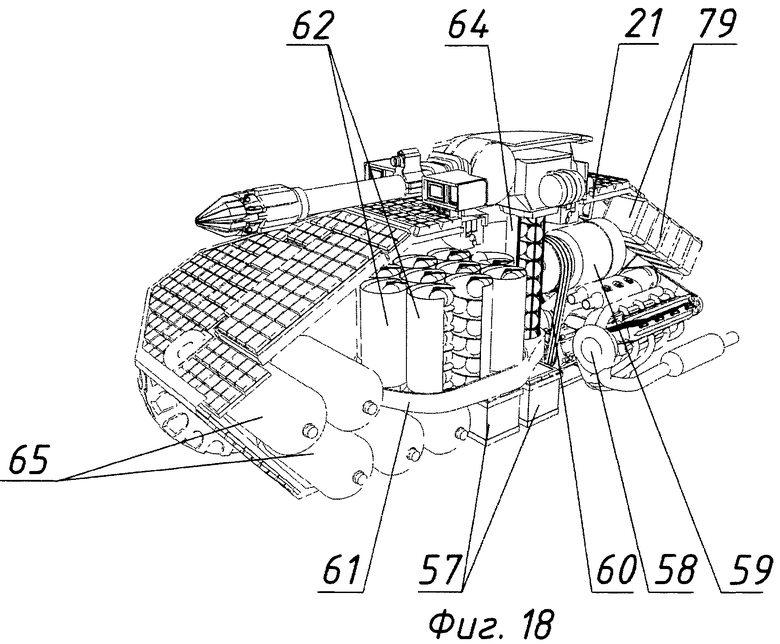
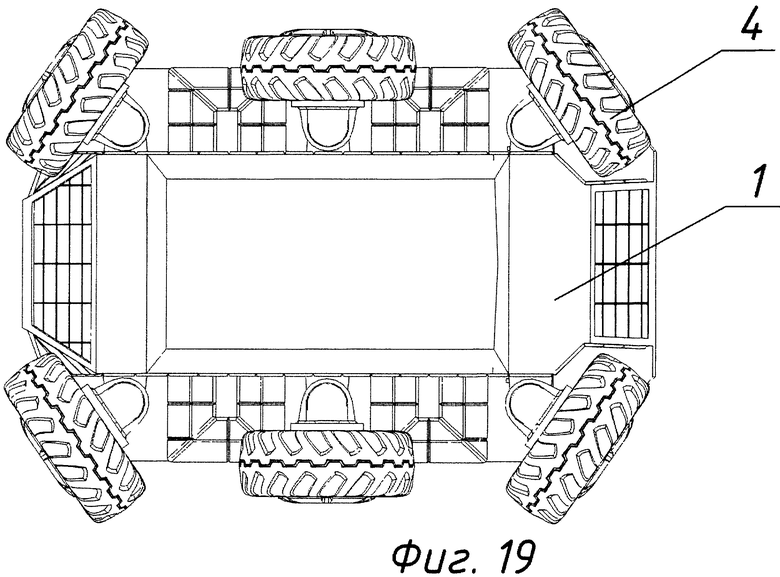
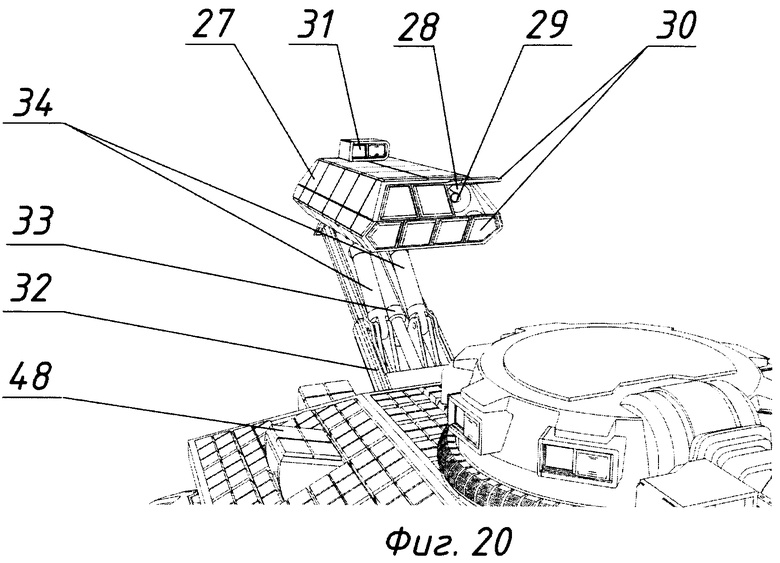
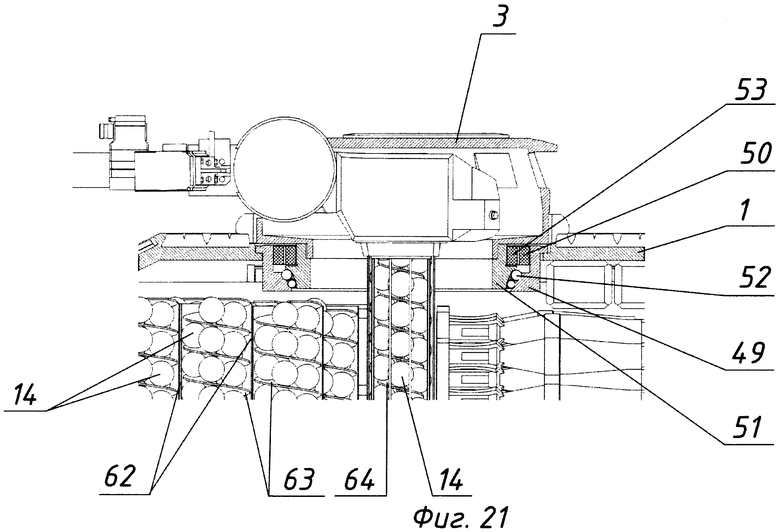
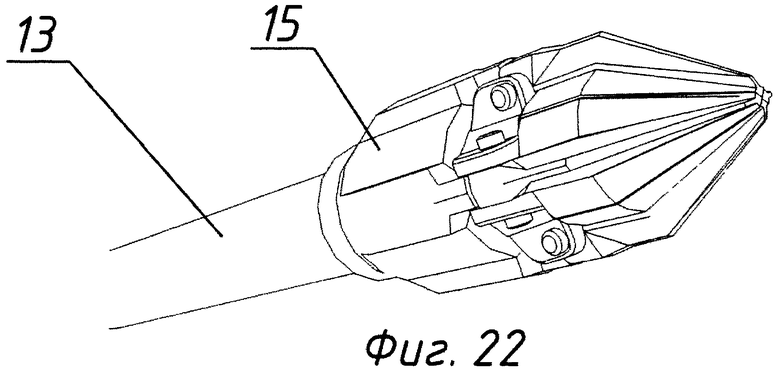
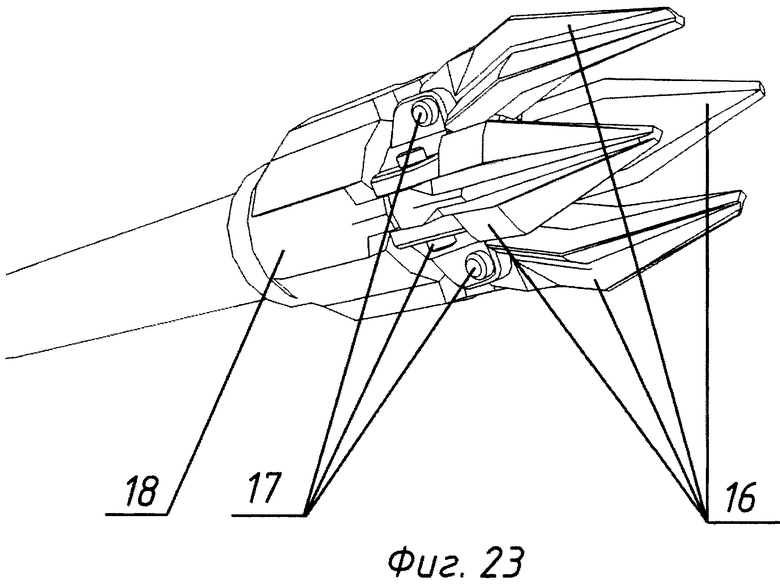
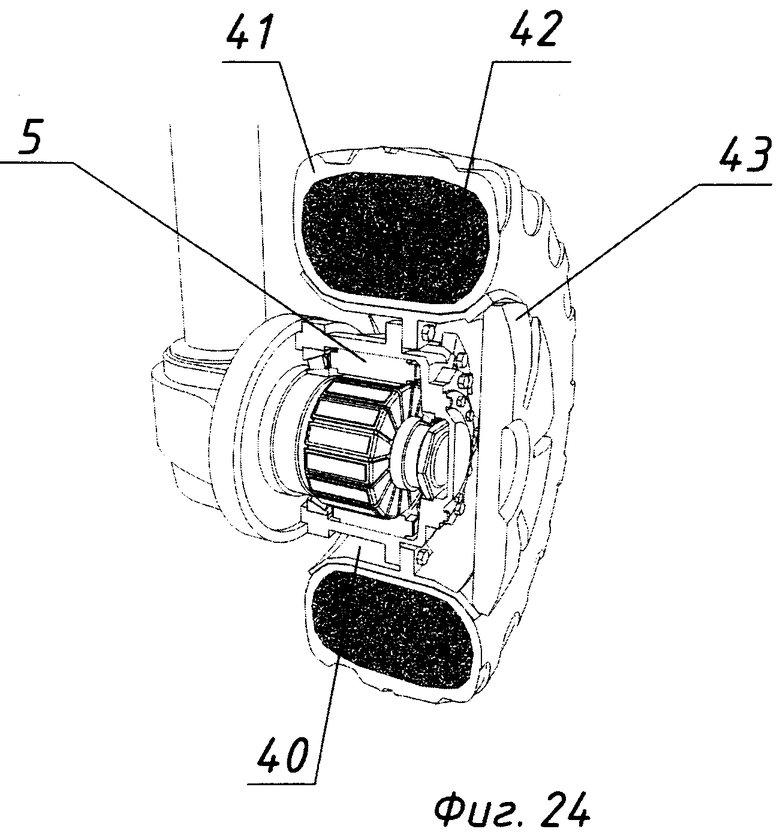
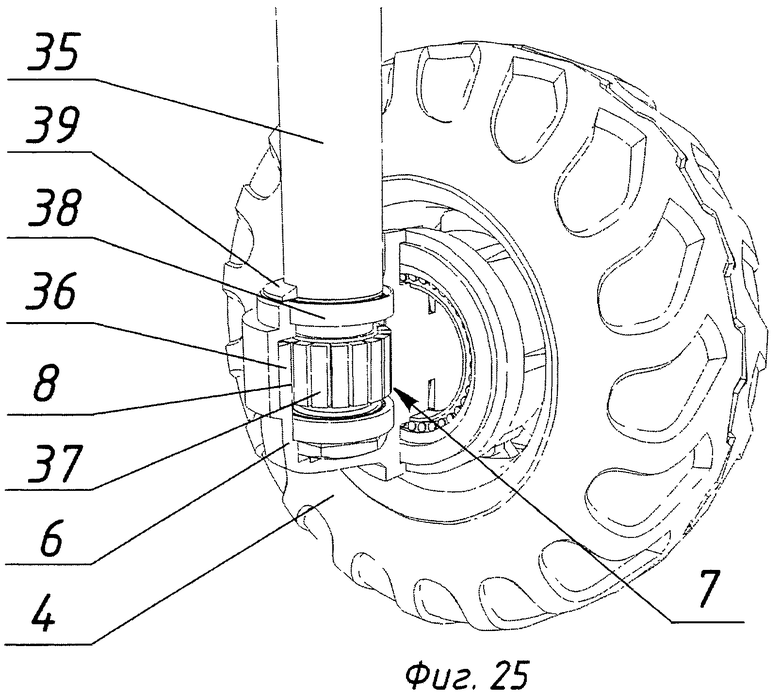
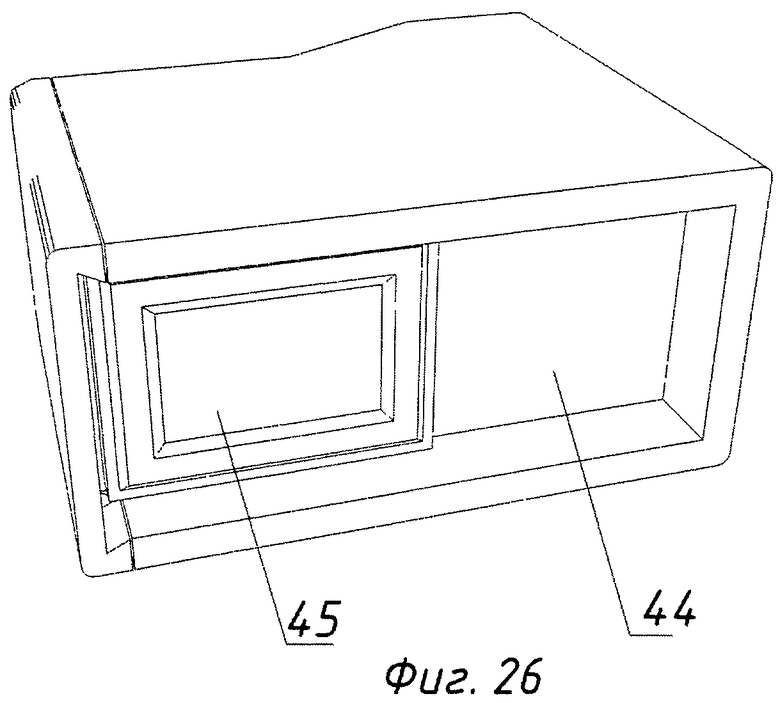
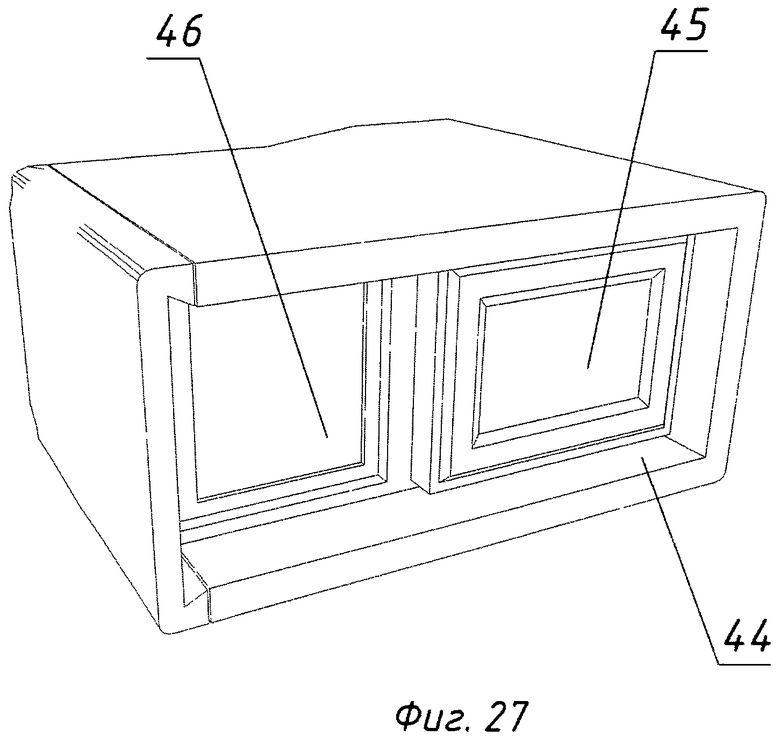
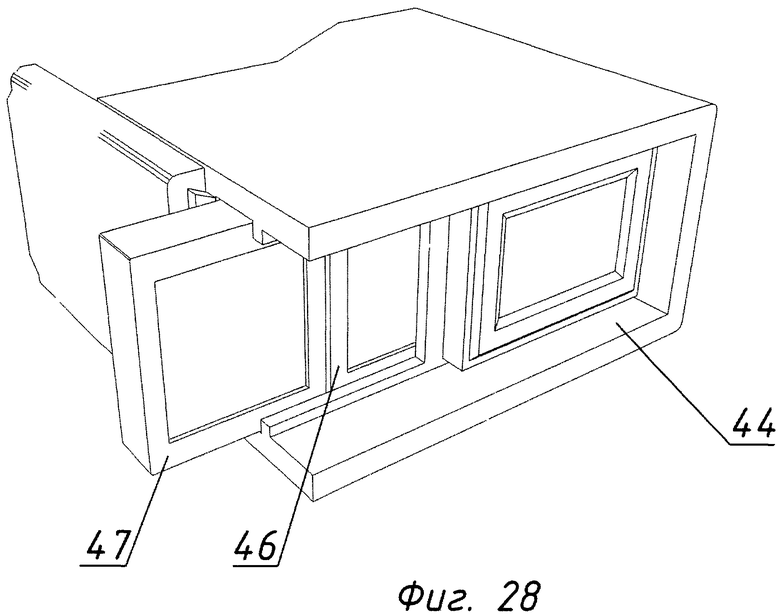
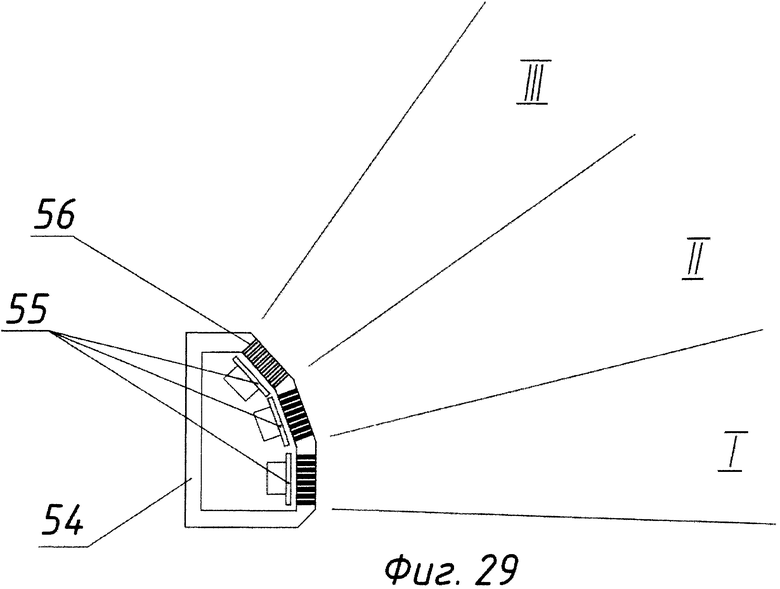
Изобретение поясняется чертежами. На фиг.1 изображен дистанционно управляемый мобильный робот в транспортном положении, в изометрии. На фиг.2 - то же, вид сверху. На фиг.3 - то же, вид сбоку. На фиг.4 - то же, варианты расположения ствола и контейнера РПГ в рабочем состоянии. На фиг.5 - мобильный робот дополнительно оснащен пулеметами в транспортном положении, вид спереди. На фиг.6 - то же, ствол сбоку в боевом горизонтальном положении, вид спереди. На фиг.7 - то же, ствол сбоку в боевом наклонном положении, вид спереди. На фиг.8 - мобильный робот дополнительно оснащен автоматами в транспортном положении, вид спереди. На фиг.9 - то же, вид сверху. На фиг.10 - то же, ствол расположен наклонно и развернут на 45°, вид спереди. На фиг.11 - то же, фрагмент башни и со стволом и автоматами, в изометрии. На фиг.12 - мобильный робот со снятой левой частью кожуха, вид сбоку. На фиг.13 - то же со снятыми верхними аккумуляторами, вид сбоку. На фиг.14 - то же со снятой верхней частью кожуха, вид сверху. На фиг.15 - то же, со снятой передней частью кожуха, вид спереди. На фиг.16 - то же, контейнер РПГ в положении зарядки, вид сбоку. На фиг.17 - мобильный робот, эконом-вариант без системы РПГ со снятой боковой частью кожуха, вид сбоку. На фиг.18 - то же, в изометрии. На фиг.19 - мобильный робот, ходовая часть, вид снизу. На фиг.20 - система РПГ в рабочем положении. На фиг.21 - поворотный механизм башни, продольное сечение. На фиг.22 - створки ствола в закрытом состоянии. На фиг.23 - створки ствола в раскрытом состоянии. На фиг.24 - колесо со встроенным электромотором (мотор-колесо), в изометрии. На фиг.25 - то же, в поперечном сечении. На фиг.26 - корпус камеры с закрытой защитной шторкой. На фиг.27 - то же, с открытой шторкой. На фиг.28 - то же, в момент смены стекла камеры. На фиг.29 - фрагмент широкополосного приемника сигналов звуковой частоты, в сечении. На фиг.30 - сферическая граната в сечении. На фиг.31 - система дистанционного управления мобильным роботом в транспортном состоянии. На фиг.32 - система дистанционного управления мобильным роботом в рабочем состоянии. На фиг.33 изображен примерный видеоряд, загруженный в память системы управления с запретными образами.
Дистанционно управляемый компактный мобильный робот включает корпус 1 с керамической броней, состоящей из особопрочных керамических пластин 2. Предельные размеры мобильного робота по высоте не превышают 1,5 метров. В верхней зоне корпуса 1 расположена башенная установка, включающая поворотную башню 3. Мобильный робот имеет ходовую систему, включающую колеса 4 (моторы-колеса) со встроенным электромотором 5, расположенным на горизонтальной оси, связанной посредством корпуса 6 с механизмом 7 поворота вокруг вертикальной оси посредством вертикально расположенного электромотора 8. Мобильный робот оснащен видеокамерами 9 корпуса 1, панорамно расположенными на корпусе 1 по его периметру и видеокамерами 10 башни 3, панорамно расположенными на башне 3 по ее периметру.
Поворотная башня 3 имеет технологический люк 11 и может быть оснащена боевым устройством с механизмом 12 изменения положения ствола 13, предназначенного для выстрелов сферическими гранатами 14. Ствол 13 снабжен устройством 15 защиты с поворотными створками 16 вокруг осей 17 посредством привода 18. На кронштейнах ствола 13 установлены дополнительные видеокамеры 19 и лазерный указатель 20 цели. Башня 3 расположена на верхней площадке 21 корпуса 1. Под тупыми углами к ней примыкают верхние: боковые наклонные площадки 22, передняя наклонная площадка 23 и задняя наклонная площадка 24. Видеокамеры 9 расположены в верхней зоне верхних наклонных площадок 22, 23 и 24. Сервисный люк 25 расположен на площадке 23, буксировочные петли 26 установлены на площадках 23 и 24. Передняя наклонная площадка 23 с наклонной нижней частью корпуса 1 образует клинообразное ребро, выступающее вперед, которое при необходимости можно использовать как таран. Мобильный робот может быть оснащен дополнительным боевым устройством, расположенным на задней наклонной площадке 24 в специальном проеме и включающим контейнер 27 с отсеками 28 для зарядов 29 типа РПГ-2 (стандартного российского противотанкового гранатомета). Каждый отсек 28 снабжен расположенными на входной и выходном концах отсеков 28 защитными поворотными крышками 30. На контейнере 27 установлена видеокамера 31 наведения. Контейнер 27 расположен на телескопической раме 32, снабжен приводом 33 приведения в боевое положение и приводом 34 системы наведения.
Ходовая система мобильного робота снабжена телескопическими стойками 35 колес 4, расположенными над электромоторами 8, включающими статор 36, постоянные магниты 37 ротора, верхний и нижний подшипники 38, установленными в корпусе 6 с защитной крышкой 39. Колеса 4, установленные на дисках 40, представляют собой покрышку 41, заполненную пористым материалом 42, например вспененной резиной. Центральная часть колеса 4 с расположенным там электромотором 5 с внешней стороны защищена бронированным колпаком 43. Такая конструкция обеспечивает защиту и стабильное функционирование колес 4 с электромотором 5 при попадании различных снарядов и осколков.
Видеокамеры 10, 19, 31, изображенные на фиг.26-28, расположены в кожухе 44 и снабжены защитными передвижными бронированными шторками 45. В кожухе 44 расположен набор сменных стекол 46 с механизмом замены поврежденного стекла 47 объектива. Видеокамеры 9 корпуса 1 снабжены поворотными бронированными шторками 48.
Поворотный механизм башни 3 представляет собой высокомоментный прямой электромотор, который включает расположенный на верхней площадке 21 корпуса 1 стол 49, являющийся корпусом статора, в верхней зоне которого закреплена обмотка 50 статора. Во внутренней полости стола 49 расположен корпус 51 ротора, связанный в нижней зоне со столом 49 посредством шаровых подшипников 52. В верхней зоне корпуса 51 ротора расположены постоянные магниты 53 из редкоземельных металлов с возможностью взаимодействия с обмоткой 50 статора. На поворотной башне 3 в ее нижней зоне расположена звукоприемная система самонаведения, представляющая собой широкополосный приемник 54 сигналов звуковой частоты, включающий расположенные в три ряда по периметру башни 3 микрофоны 55 направленного действия. В нижнем ряду звуковые каналы 56 микрофонов 55 расположены горизонтально, в среднем ряду - с наклоном к линии горизонта под небольшим углом. Верхний ряд микрофонов 55 имеет еще больший наклон (от 45° до 75°).
Корпус 1 мобильного робота и поворотная башня 3 могут быть выполнены герметичными для движения под водой. Для этого корпус 1 и башню 3 оснащают уплотнителями (не показано) для исключения попадания влаги внутрь корпуса 1.
Для обеспечения бесшумного хода мобильный робот оснащен аккумуляторной системой, состоящей из сухих аккумуляторов 57, компактно расположенных внутри корпуса 1. При необходимости мобильный робот может быть дополнительно оснащен дизель-генератором, либо двигателем внутреннего сгорания (ДВС) 58, связанным с генератором 59 посредством ременной передачи 60. В мобильном роботе можно использовать дизель-генератор или ДВС 58 в качестве основного двигателя для случаев, когда нет необходимости в бесшумности мобильного робота.
В варианте исполнения мобильного робота, оснащенного боевым устройством с использованием сферических гранат 14, передняя зона внутренней полости корпуса 1 содержит емкость 61 с колбами 62, снабженными винтовыми распределителями 63. Емкость 61 связана с винтовым конвейером 64 для подачи сферических гранат к пневматическому пусковому механизму (не показано) ствола 13. Рядом с емкостью 61 расположены баллоны 65 со сжатым воздухом, предназначенным для запуска и активации сферических гранат 14. Граната 14 содержит шарообразный металлический слой 66, выполненный, например, из стальной крошки, покрытый фторопластовой оболочкой 67. Внутри металлического слоя 66 расположен шарообразный слой 68 взрывчатого вещества с внутренней полостью 69. Полость 69 связана с наружным воздухом посредством воздуховодов 70, проходящих насквозь через слои 68, 66 и оболочку 67. Каждый воздуховод 70 заканчивается датчиком 71 давления воздуха, расположенным в полости 69 по ее периметру. Рядом с датчиками 71 расположены капсюли 72. Внутри полости 69 находится взрыватель, который может быть активирован только под большим давлением воздуха при движении сферической гранаты 14 по стволу 13.
В варианте использования в мобильном роботе дополнительного боевого устройства для зарядов типа стандартного российского противотанкового гранатомета РПГ-2 внутри корпуса 1 в его задней зоне расположены блоки зарядов 29 типа РПГ с держателями 73, оснащенными механизмом 74 поворота.
Для повышения универсальности мобильного робота он дополнительно может быть снабжен либо пулеметами 75, расположенными на общем кронштейне 76 со стволом 13, либо автоматами 77, расположенными на кронштейне 78 параллельно стволу 13. Механизм 12 изменения положения ствола 13 также предназначен для изменения положения либо пулемета 75, либо автомата 77.
Исполнительные блоки 79 электронной системы 80 дистанционного управления расположены на внутренней поверхности корпуса 1 и надежно защищены броней, состоящей из керамических пластин 2. Компактная портативная система 80 дистанционного управления размещена в переносном кейсе 81. В корпусе 82 кейса 81 расположены клавиатура 83 программатора, пульт 84 переключения режимов движения, регуляторы 85 параметров мобильного робота, джойстики 86 ручного управления его движением, джойстики 87 и 88 ручного управления боевыми устройствами. На корпусе 82 кейса 81 расположена откидная подставка под руки оператора. В крышке 89 кейса 81 размещен монитор 90, осветительные лампы 91 и антенна 92. В мониторе 90 предусмотрены окна 93 для получения изображений со всех видеокамер 9, 10, 19, 31.
Современные автоматизированные и роботизированные сварочные технологии и наличие особопрочных и легких металлических сплавов позволяют изготавливать основные узлы мобильного робота прочными, легкими и надежными. Керамическая броня, выполненная из легкой керамики и композита на основе высокопрочных материалов, а также дисперсно-керамическая броня обеспечивают высокую защиту мобильному роботу-охраннику. Благодаря использованию моторов-колес мобильный робот имеет высокую скорость и хорошую маневренность даже на небольшом пространстве.
Дистанционно управляемый компактный мобильный робот работает следующим образом. В варианте, когда мобильный робот оснащен только аккумуляторами 57, время его работы ограничено количеством аккумуляторов 57: чем больше опций имеет мобильный робот, тем меньше места для дополнительных аккумуляторов 57. Одного или группу мобильных роботов направляют в зону охраны вместе с комплексом подзарядки и запасных мобильных роботов. Во время движения в охраняемой зоне очень важна бесшумность и незаметность мобильного робота. Поэтому при его небольших габаритах он максимально опущен к земле: телескопические стойки 35 колес 4 находятся в нижнем положении. Поднятие телескопических стоек 35 осуществляют только на короткий момент, когда мобильному роботу надо увеличить обзор по высоте. Большая часть программ, содержащихся в памяти системы 80 управления, позволяет работать мобильному роботу в автоматическом режиме, но один или два оператора постоянно отслеживают всю поступающую информацию и при необходимости корректируют движение и работу мобильного робота.
Благодаря тому, что по периметру башни 3 расположена панорамная звукоприемная система самонаведения, представляющая собой широкополосный приемник 54 сигналов звуковой частоты, включающий три ряда микрофонов 55 направленного действия с большим углом охвата по высоте, обеспечивается высокая скорость сканирования звукового пространства и вычленения самого сильного сигнала. Высокие ходовые и охранные качества мобильного робота дают возможность мгновенного реагирования на опасные сигналы: выстрелы, взрывы и т.д. В боевой обстановке, когда выявлено наличие опасности, в системе 80 управления мобильным роботом либо срабатывает программа мгновенного самонаведения: и он может отвечать выстрелом на выстрел, взрыв и подобную опасность, либо программа мгновенного изменения местоположения мобильного робота. Наличие нескольких уровней защиты мобильного робота и высокая маневренность благодаря использованию на колесах 4 встроенных электромоторов 5, а на стойках 35 электромотора 8, обеспечивает ему высокий уровень «выживаемости». При поддержке своего оружия мобильный робот может выполнять все свои функции до полной разрядки аккумуляторов 57. В идеальном варианте мобильный робот должен успеть вернуться к комплексу подзарядки, а на его место направляют следующий мобильный робот из находящихся в запасе. В варианте, когда мобильный робот оснащен дизель-генератором, либо двигателем внутреннего сгорания (ДВС) 58, время его независимого движения значительно увеличивается, но он становится более уязвимым перед системами звукоулавливания.
Наличие наборов сменных стекол 46 с механизмом замены поврежденного стекла 47 объектива видеокамер 10, 19, 31 дает возможность мобильному роботу вести разведку на охраняемой территории во время боевых действий противника даже при отсутствии боевого оружия у мобильного робота-разведчика. Мгновенная смена поврежденного стекла 47 практически не прерывает трансляцию получаемых изображений. Несколько видеокамер 9 и 10 обеспечивают панорамный охват и дублируют часть угла обзора друг друга. Видеокамеры 9, 10, 19, 31 осуществляют видеонаблюдение при любом освещении, в том числе они предназначены и для ночного видения.
Боевое оружие, которое может быть использовано на мобильном роботе, тоже имеет несколько уровней защиты. Ствол 13 снабжен устройством 15 защиты с поворотными створками 16 вокруг осей 17 посредством привода 18, поэтому исключено попадание снарядов противника в отверстие ствола 13. На стволе 13 установлены дополнительные видеокамеры 19 со сменными стеклами 46. Благодаря высокой скорости быстродействия поворотного механизма башни 3 за счет использования высокомоментного электромотора, поворот ствола 13 в сторону удара происходит очень быстро, что является одним из важных условий выживаемости мобильного робота в боевой обстановке. Сферические гранаты 14 до активации в стволе 13 путем продувки воздуховодов 70 сжатым воздухом являются абсолютно безопасными. Они не взрываются при ударах. Сферические гранаты 14, находящиеся в колбах 62, скатываются под действием собственного веса по мере расходования по винтовым распределителям 63, а к стволу 13 их подают с помощью винтового конвейера 64. Активация гранат 14 происходит в самый последний момент перемещения внутри ствола 13 перед их вылетом. Только в этом случае граната 14 взрывается при попадании в цель.
Дополнительное боевое устройство, расположенное в проеме задней наклонной площадки 24 с контейнером 27, защищено броней мобильного робота и выдвигается наружу из проема площадки 24 только перед нанесением удара. Внешняя поверхность контейнера 27 также покрыта керамической броней. Видеокамеры 31 снабжены наборами сменных стекол 46. Для перезарядки отсеков 28 новой партией зарядов 29 контейнер 27 выдвигают под острым углом к горизонту на длину контейнера 27. Перезарядка происходит внутри корпуса 1. Каждый отсек 28 является стволом для выстрела зарядом 29. Выстрелы зарядами 29 из отсеков 28 осуществляют по очереди в автоматическом режиме. Перезарядка контейнера 27 происходит почти мгновенно. Наличие таких дополнительных опций как пулемет 75 или автомат 77 на мобильном роботе повышает степень его защищенности.
В память системы 80 дистанционного управления мобильным роботом введены запретные образы 94 (пример видеоряда изображен на фиг.33). Изображения, получаемые от видеокамер 9, 10, 19, 31, в онлайн-режиме сканируются и сопоставляются системой 80 с запретными образами 94, поэтому выстрелы в сторону детей, женщин, пожилых и мирных людей и т.д. практически исключены. Программой системы 80 предусмотрена ситуация, когда мобильный робот израсходовал ресурсы аккумуляторов 57 или имеет повреждения, не совместимые с дальнейшим выполнением своих функций, и находится в окружении противника с угрозой его захвата, то срабатывает команда «самоликвидации», и мобильный робот самоподрывается.
Универсальная конструкция мобильного робота и его основных узлов: ходовой системы, обладающей высокой маневренностью, бронированного корпуса, панорамной звукоприемной системы самонаведения в совокупности с поворотным механизмом башни 3, обладающим высоко степенью быстродействия, легко изготавливаются в условиях как единичного, так и серийного производства с использованием современной элементной базы, новейших конструкторских материалов. Такой мобильный робот может выполнять охранные функции практически для всех удаленных объектов, а при наличии вооружения - даже в опасных зонах.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышении надежности и улучшении эксплуатационных характеристик дистанционно управляемого мобильного робота при повышении его универсальности и увеличении скорости сканирования звукового пространства, расширения технических возможностей мобильного робота, повышения маневренности и быстроходности его ходовой системы при повышении уровня его защищенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2544434C1 |
| МОБИЛЬНАЯ АВИАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2016 |
|
RU2623128C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
| СПОСОБ ТРАНСФОРМИРОВАНИЯ МОБИЛЬНОГО ДОМА И МОБИЛЬНЫЙ ДОМ-ТРАНСФОРМЕР | 2010 |
|
RU2453663C1 |
| СПОСОБ ОСОБО ТОЧНОЙ ОБРАБОТКИ ЗУБОВ И ПОРТАТИВНАЯ УСТАНОВКА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ МАЛОГАБАРИТНОГО УСТРОЙСТВА ДЛЯ ОБРАБОТКИ ЗУБОВ | 2010 |
|
RU2443396C1 |
| ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) | 2016 |
|
RU2633667C2 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| МАГАЗИН БЫСТРОГО ОБСЛУЖИВАНИЯ ПОКУПАТЕЛЕЙ НА АВТОМОБИЛЯХ | 2017 |
|
RU2665991C1 |
Изобретение относится к беспилотным бронированным, оснащенным вооружением транспортным средствам и предназначено для осуществления военных или полицейских задач. Дистанционно управляемый мобильный робот содержит бронированный корпус из керамических пластин с поворотной башенной установкой, ходовую систему с электромоторами-колесами, аккумуляторную систему, дизель-генератор или двигатель внутреннего сгорания, панорамно расположенные на корпусе и на башне видеокамеры, звукоприемную систему самонаведения, блоки управления. Ходовая система содержит телескопические стойки электромоторов-колес, содержащие электромоторы. Кожух видеокамеры содержит защитные передвижные бронированные шторки, механизм замены стекла объектива. Сферическая граната для выстрелов из боевого устройства содержит расположенный во фторопластовой оболочке шарообразный металлический слой. В полости шарообразного металлического слоя расположен шарообразный слой взрывчатого вещества с внутренней полостью, с воздуховодами, проходящими через слои и оболочку, с датчиками давления и взрывателем. 4 н. и 13 з.п. ф-лы, 33 ил.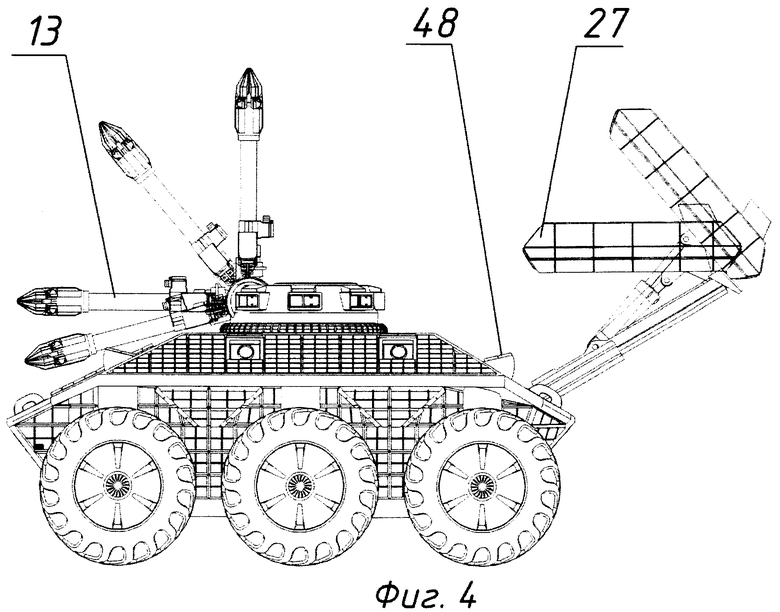
1. Дистанционно управляемый мобильный робот, содержащий бронированный корпус с поворотной башенной установкой и ходовой системой, включающей электромоторы-колеса, автономный источник энергии, системы автоматического наружного слежения, блоки управления, расположенные на мобильном роботе, и дистанционную систему управления, при этом поворотный механизм башенной установки выполнен в виде высокомоментного электромотора, включающего расположенный на верхней площадке бронированного корпуса стол с обмоткой статора, закрепленной в столе, и корпуса ротора, расположенного во внутренней полости стола и связанного со столом посредством шаровых подшипников, причем в корпусе ротора расположены постоянные магниты с возможностью взаимодействия с обмоткой статора, при этом ходовая система снабжена телескопическими стойками элетромоторов-колес, снабженными дополнительными электромоторами, причем системы автоматического наружного слежения выполнены в виде панорамно расположенных на корпусе мобильного робота и на башне видеокамер и в виде звукоприемной системы самонаведения, включающей широкополосный приемник сигналов звуковой частоты с расположенными по периметру башни микрофонами направленного действия.
2. Робот по п.1, отличающийся тем, что обмотка статора закреплена в верхней зоне стола, а постоянные магниты корпуса ротора расположены в его верхней зоне.
3. Робот по п.1, отличающийся тем, что постоянные магниты корпуса ротора выполнены из редкоземельных металлов.
4. Робот по п.1, отличающийся тем, что дополнительные электромоторы телескопических стоек выполнены в виде вертикально расположенного в нижней зоне телескопических стоек ротора с возможностью взаимодействия с постоянными магнитами статора, установленного в кожухе электромотора-колеса с защитной крышкой.
5. Робот по п.1, отличающийся тем, что колеса ходовой системы, установленные на дисках, выполнены в виде покрышки, заполненной пористым материалом, например вспененной резиной, а центральная часть колеса с расположенным в ней электромотором с внешней стороны снабжена бронированным колпаком.
6. Робот по п.1, отличающийся тем, что его бронированный корпус выполнен из керамических пластин.
7. Робот по п.1, отличающийся тем, что он снабжен боевым устройством для выстрелов сферическими гранатами, включающим ствол с механизмом изменения его положения, установленный на башне, и расположенные внутри корпуса мобильного робота колбы со сферическими гранатами, снабженные винтовыми распределителями, связанные с винтовым конвейером для подачи сферических гранат к пусковому механизму.
8. Робот по п.7, отличающийся тем, что ствол боевого устройства снабжен устройством защиты, расположенным на его выходном конце и выполненным в виде поворотных створок с приводом.
9. Робот по п.7, отличающийся тем, что боевое устройство для выстрелов сферическими гранатами снабжено расположенными на кронштейнах ствола видеокамерами и лазерным указателем цели.
10. Робот по п.1, отличающийся тем, что он снабжен дополнительным боевым устройством, расположенным в задней зоне корпуса и включающим контейнер с отсеками для зарядов типа РПГ-2, при этом каждый отсек контейнера снабжен защитными поворотными крышками, расположенными на входном и выходном концах отсеков, а контейнер расположен на телескопической раме и снабжен приводом приведения в боевое положение и приводом системы наведения, причем дополнительное боевое устройство снабжено расположенными внутри корпуса мобильного робота блоками зарядов с поворотными держателями.
11. Робот по п.10, отличающийся тем, что он снабжен установленной на контейнере дополнительного боевого устройства видеокамерой наведения.
12. Робот по п.1, отличающийся тем, что он снабжен пулеметами, расположенными на общем кронштейне со стволом боевого устройства.
13. Робот по п.1, отличающийся тем, что он снабжен автоматами, расположенными на общем кронштейне со стволом боевого устройства.
14. Робот по п.1, отличающийся тем, что его видеокамеры снабжены защитными элементами.
15. Видеокамера мобильного робота, включающая расположенный в кожухе объектив, причем кожух снабжен защитными передвижными бронированными шторками, при этом кожух дополнительно снабжен набором сменных стекол для объектива с механизмом замены поврежденного стекла объектива.
16. Звукоприемная система самонаведения мобильного робота, включающая широкополосный приемник сигналов звуковой частоты с расположенными по периметру башни микрофонами направленного действия, причем микрофоны направленного действия расположены в три ряда по периметру башни, при этом звуковые каналы микрофонов в нижнем ряду расположены горизонтально, в среднем ряду - с наклоном к линии горизонта под небольшим углом, а звуковые каналы верхнего ряда микрофонов расположены с наклоном от 45° до 75°.
17. Сферическая граната, включающая расположенный во фторопластовой оболочке шарообразный металлический слой, выполненный, например, из стальной крошки, при этом в полости шарообразного металлического слоя расположен шарообразный слой взрывчатого вещества с внутренней полостью, связанной с наружным воздухом посредством воздуховодов, проходящих насквозь через слои и оболочку, причем в полости шарообразного слоя взрывчатого вещества по его периметру на концах воздуховодов расположены датчики давления воздуха с капсюлями, при этом во внутренней полости шарообразного слоя взрывчатого вещества расположен взрыватель, выполненный с возможностью активирования под большим давлением воздуха при движении сферической гранаты по стволу.
| JP 0061131106 А, 18.06.1986 | |||
| Устройство для изготовления полимерной композиции | 1988 |
|
SU1562019A1 |
| US 2011056367 A1, 10.03.2011 | |||
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |

