Изобретение относится к области военной и специальной технике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в условиях боевых действий, разведочных мероприятий местности и может быть использовано для доставки, минирования и дистанционного подрыва противотанковой мины или других боеприпасов по движущимся и стационарным целям противника.
Известна платформа GNOM-камикадзе под противотанковую мину, разработанная украинской компанией Temerland Military Solutions (см. https://temerland.com/resheniya/platforma-gnom-kamikaminu/, дата обращения 11.07.2023 г. ) и используемая для ликвидации легких транспортных средств, ликвидации бронированных транспортных средств, организации засад и налета в городских условиях. Представляет из себя самоходную роботизированную платформу с дистанционным управлением, способную нести противотанковый боеприпас или иную полезную нагрузку. Платформа состоит из корпуса коробчатого типа на четырех колесах, внутри которого помещаются противотанковая мина, электрические компоненты, система дистанционного управления, аккумуляторы и прочие элементы. Платформа имеет электрический привод. Дистанционное управление миной осуществляется оператором по радиоканалу. В качестве противотанкового боеприпаса используется противотанковая мина ТМ-62, также могут использоваться и противопехотные мины. Основными недостатками являются: платформа на колесном шасси пониженного профиля имеет низкую проходимость на поле боя с кочками, ямами и прочими препятствиями, что существенно снижает ее эффективность и возможность использования на реальном поле боя; низкий радиус действия - не более 800 м.; необходимость оператора находится близко к месту применения платформы.
Известна самоходная гусеничная минная машина «Goliath» (сокращенно Sd.Kfiz.302) (https://topwar.ru/94692-distancionno-upravlyaemye-podryvnye-mashiny-semeystva-sdkfz302-303-goliath-germaniya.html, дата обращения 11.07.2023 г. ), разработанная немецкой фирмой Borgward. Представляет из себя машину на гусеничном ходу, корпус которого разделен на три отсека. В заднем отсеке находится катушка с кабелем управления длиной около 600 м, в среднем - устройства и механизмы управления, в переднем - контейнер со взрывчаткой. По бокам корпуса между катками и закрытыми крышками располагаются электромоторы, передающие крутящий момент на ведущие передние колеса, и аккумуляторные батареи. Управление машиной осуществляет оператор при помощи пульта, подключенного к машине посредством кабеля. Маневрируя при помощи рычажков пульта управления, оператор совершал подрыв машины в необходимый момент, подрывая объект поражения.
Основными недостатками являются: малое расстояние управления машиной, ограничивающееся длиной кабеля; низкая проходимость через воронки, ямы и прочие препятствия; момент взрыва полностью определяется оператором, в виду отсутствия контактного взрывателя и других средств подрыва; кабель управления без защиты может легко пострадать во время боя, что приведет к потери управления машиной.
Предлагаемое изобретение решает задачи по повышению боевой эффективности применения минных боеприпасов, поражению военной техники и объектов военной инфраструктуры противника на дальних расстояниях, возможность проведения разведочных мероприятий, снижению потерь личного состава, расширению номенклатуры аналогичных технических средств поражения и разведки, а также применению роботизированных боевых средств без непосредственного участия личного состава вблизи объекта поражения.
Технический результат заявляемого изобретения заключается в разработке противотанковой мины роботизированной, обладающей высоким поражающим эффектом, избирательностью объекта поражения, высокими проходимыми качествами и возможностью переворота, малой шумностью при движении за счет использования аккумуляторной батареи, рациональностью размещения составных частей, легкостью управления, многозадачностью за счет набора средств визуального контроля и различных датчиков и возможностью установки большой номенклатуры минных боеприпасов.
Для пояснения описываемой противотанковой мины роботизированной приведены чертежи:
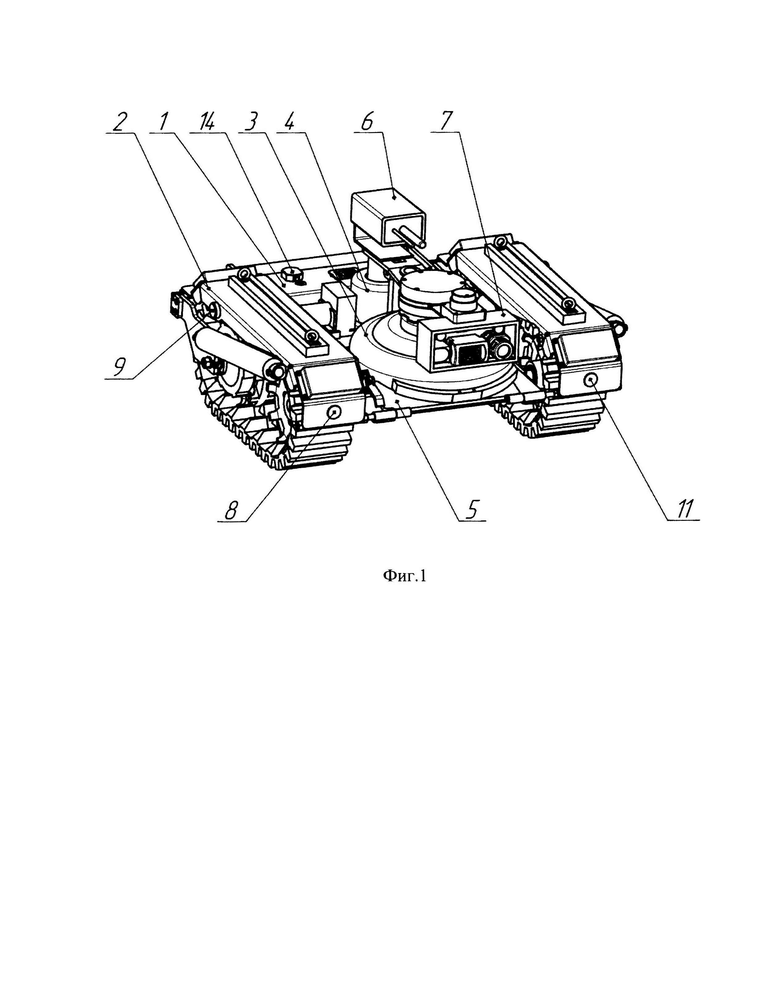
Фиг. 1 - общий вид противотанковой мины роботизированной;
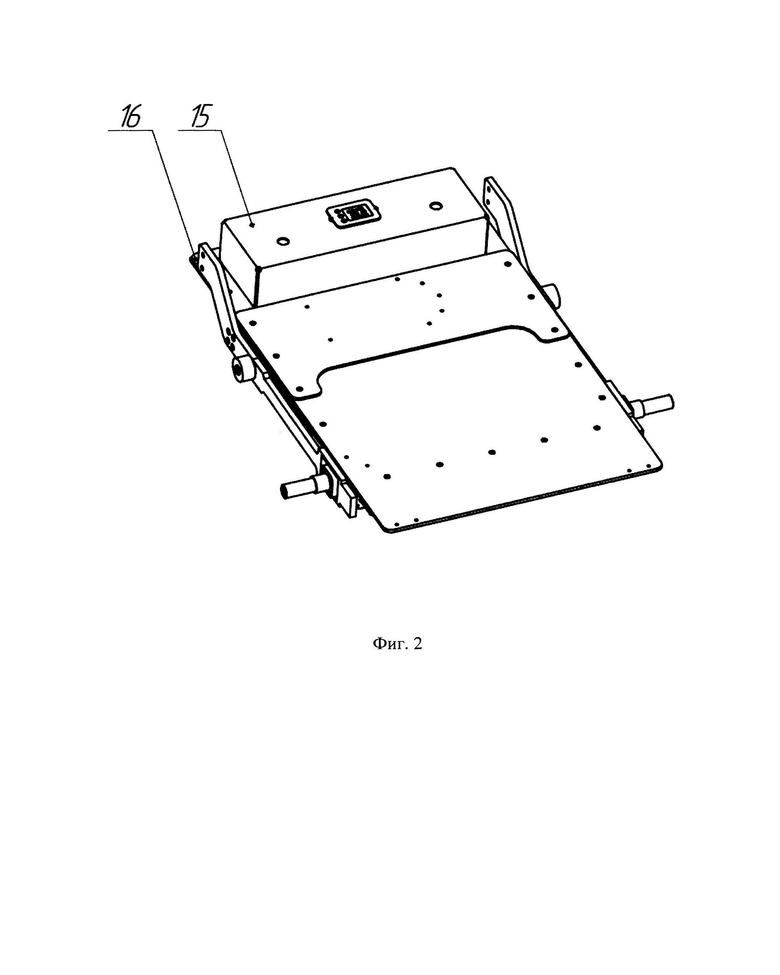
Фиг. 2 - рама сборная;
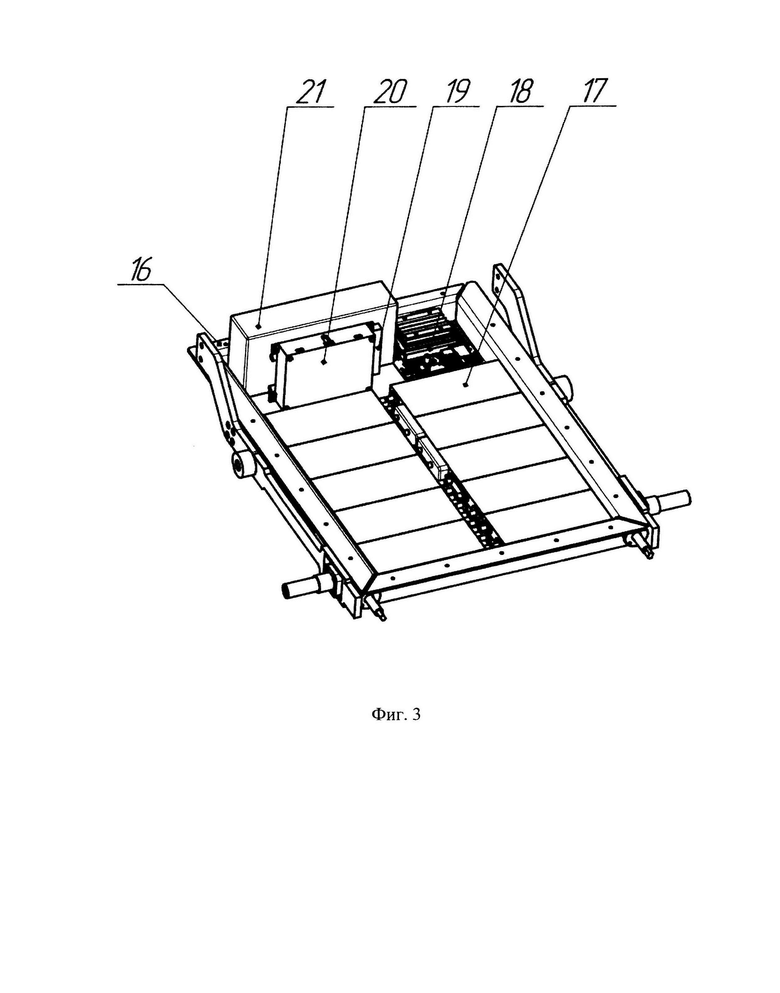
Фиг. 3 - рама сборная без крышки корпуса аккумулятора;
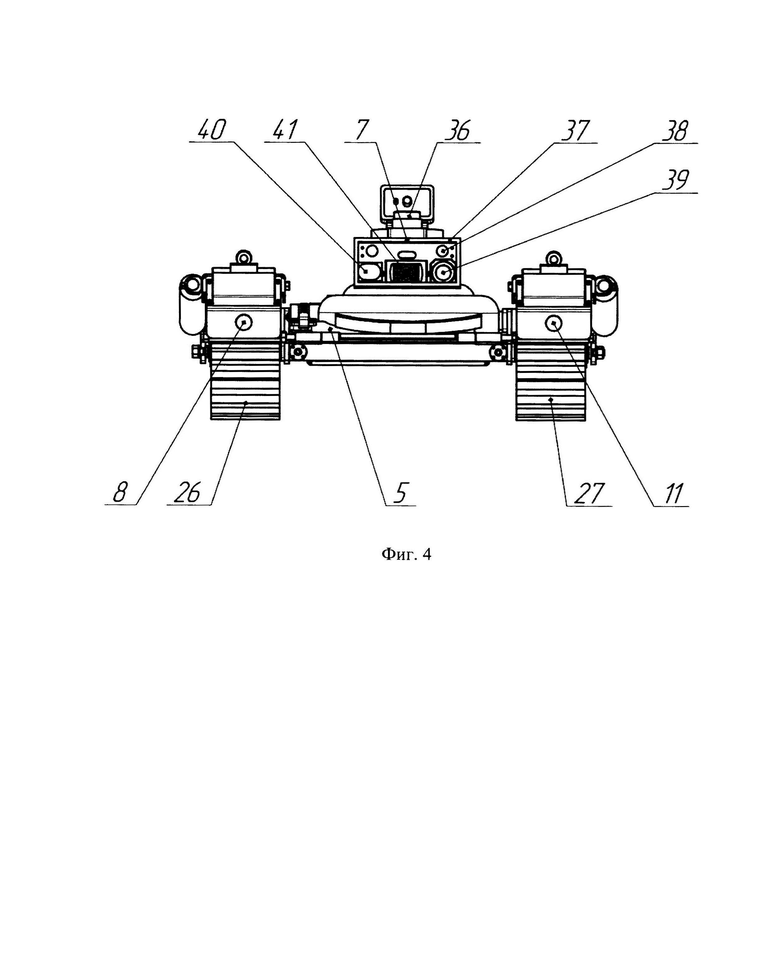
Фиг. 4 - вид противотанковой мины роботизированной спереди;
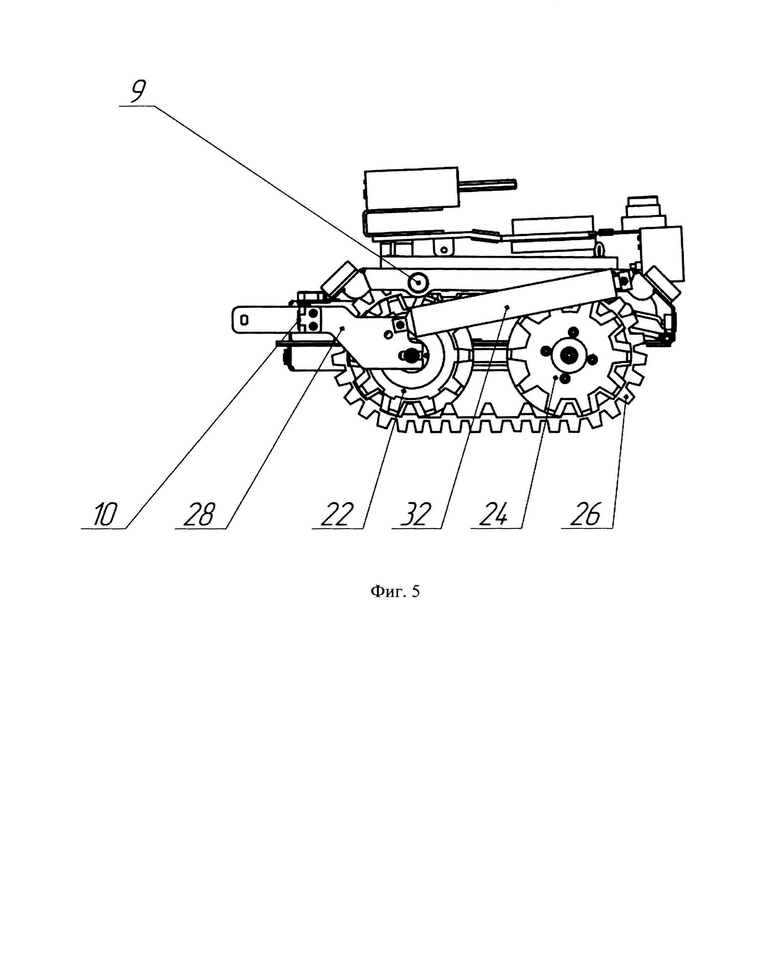
Фиг. 5 - вид противотанковой мины роботизированной слева;
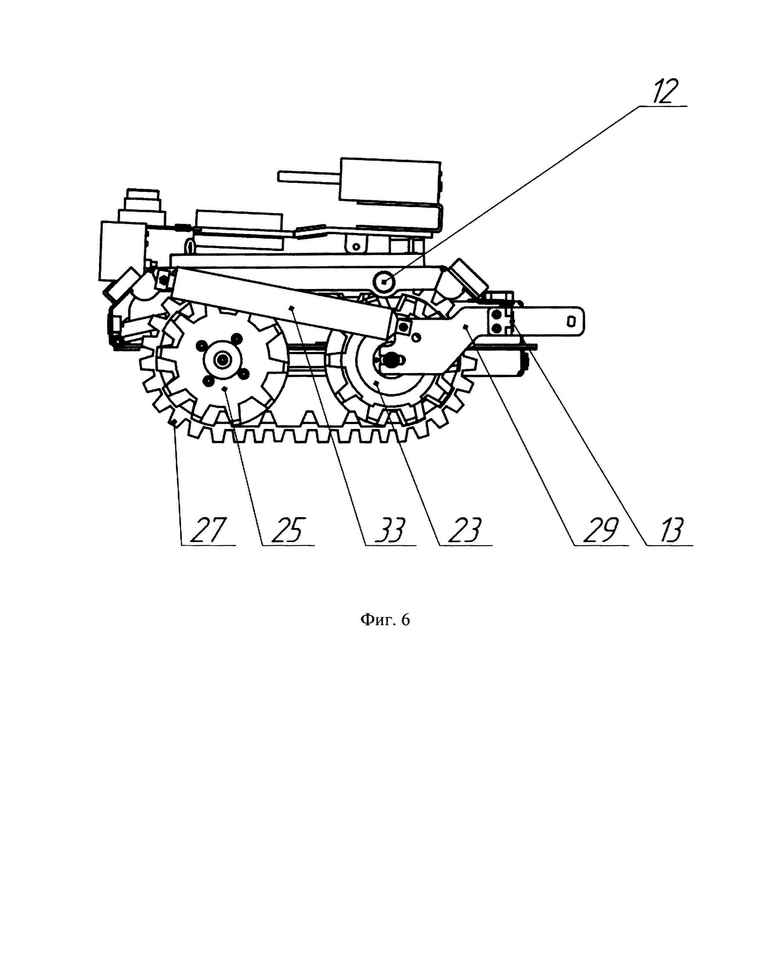
Фиг. 6 - вид противотанковой мины роботизированной справа;
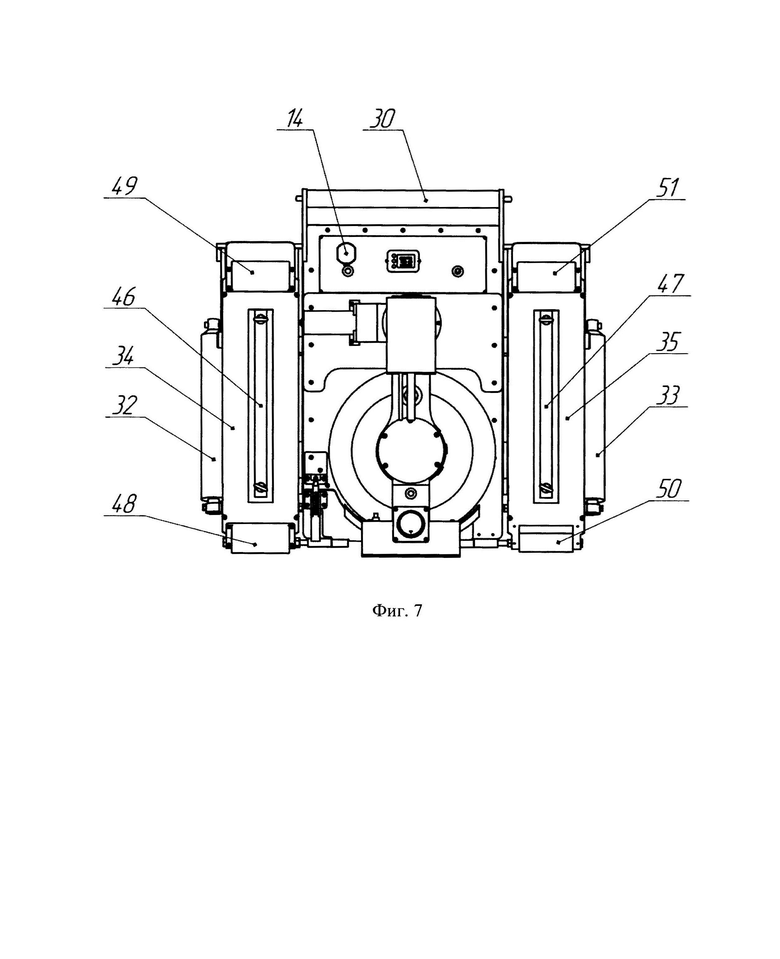
Фиг. 7 - вид противотанковой мины роботизированной сверху;
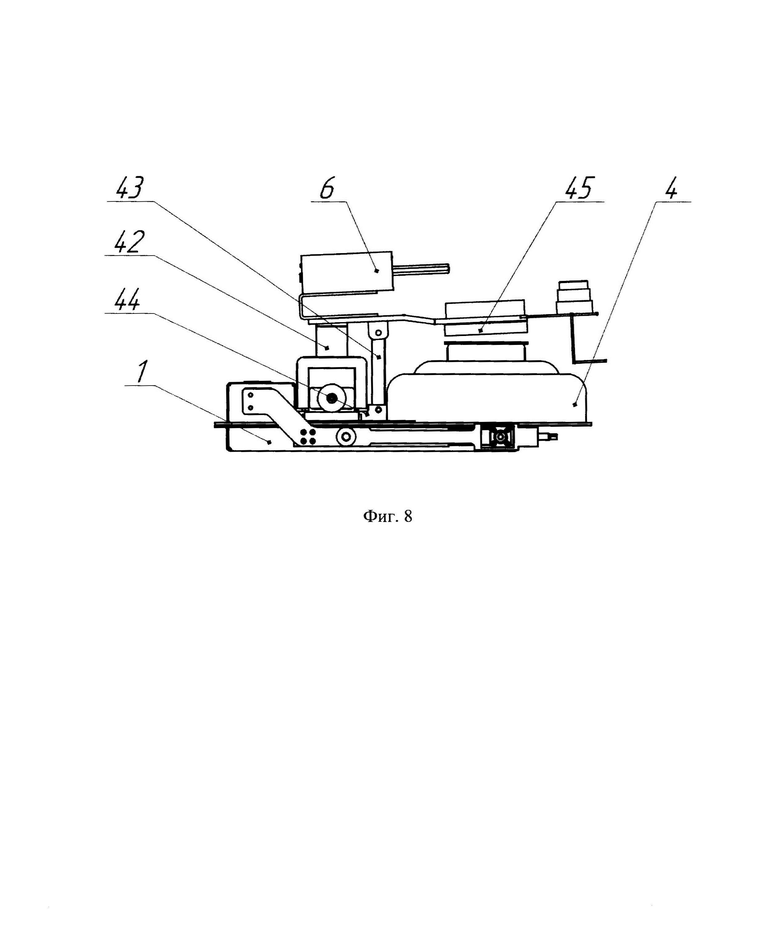
Фиг. 8 - система запуска мины;
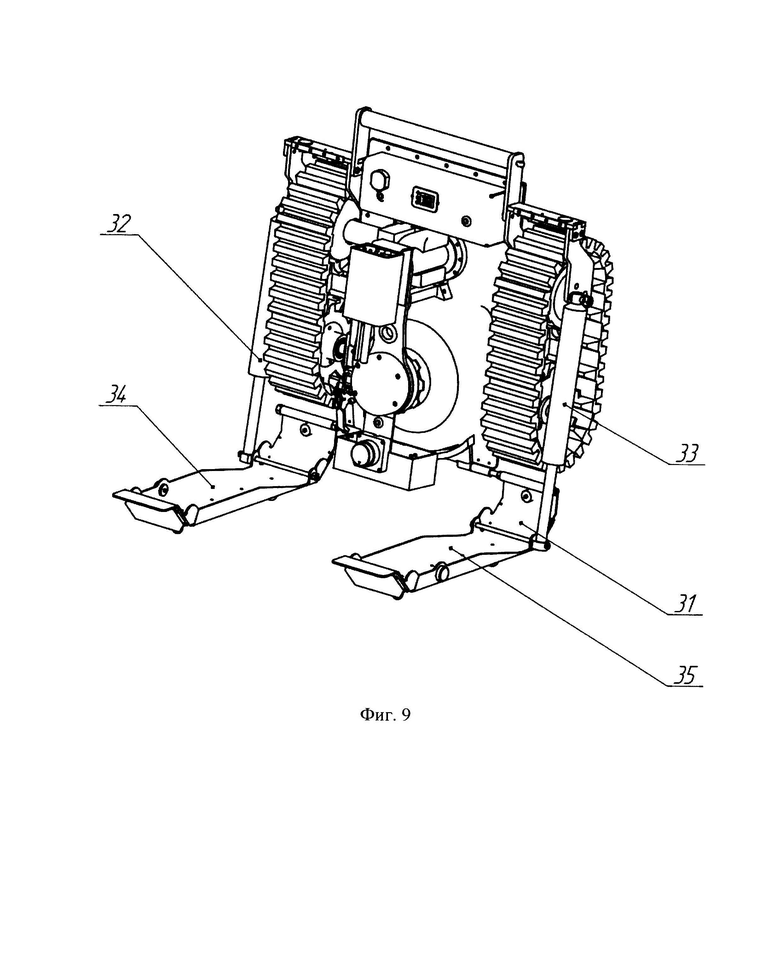
Фиг. 9 - противотанковая мина роботизированная в режиме переворачивания.
Технический результат достигается за счет того, что противотанковая мина роботизированная состоящая из рамы сборной 1, гусеничной платформы 2, мины 3, системы запуска мины 4, прижима мины 5, металлоискателя 6, блока контроля 7, ультразвукового дальномера левого переднего 8, ультразвукового дальномера левого центрального 9, ультразвукового дальномера левого заднего 10, ультразвукового дальномера правого переднего 11, ультразвукового дальномера правого центрального 12, ультразвукового дальномера правого заднего 13, антенны ГЛОНАСС/GPS 14.
Рама сборная 1 состоит из крышки корпуса аккумулятора с ваттметром аккумуляторной батареи 15 и корпуса аккумулятора 16, внутри которого размещены аккумуляторная батарея 17, микрокомпьютер с цифровым гироскопом, приемо-передатчиком видеосигнала и радиомодемом 18, модуль управления аккумуляторной батареей (BMS) 19, контроллер двойного двигателя 20 и зарядное устройство 21.
Гусеничная платформа 2 состоит из мотор-колеса левого 22, мотор-колеса правого 23, ведомого колеса левого 24, ведомого колеса правого 25, гусеничного полотна левого 26, гусеничного полотна правого 27, бампера левого 28, бампера правого 29, ручки транспортировочной 30, жестко закрепленной к бамперу левому 28 и бамперу правому 29, системы переворота 31, состоящая в свою очередь из линейного привода левого 32, линейного привода правого 33, крыла левого 34 и крыла правого 35.
Блок контроля 7 прикреплен к системе запуска мины 4 и состоит из лидара 36, корпуса блока 37 и установленных в нем стереокамеры 38, тепловизора 39, дальномера 40 и видеокамеры с прожектором 41.
Система запуска мины 4 состоит из домкрата электрогидравлического 42, трубы опорной 43, прижима домкрата 44 и пускового механизма с тензодатчиком 45.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в состав оборудования могут входить маскировочные комплекты и маски.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в качестве боеприпаса может быть установлена противотанковая мина семейства ТМ-62.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в качестве боеприпаса может быть установлена противотанковая мина ТМ-72.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в качестве боеприпаса может быть установлена противотанковая мина ТМ-89.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в качестве боеприпаса может быть установлена мина семейства ПМН.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в качестве боеприпаса может быть установлена унифицированная дымовая шашка УДШ.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в конструкцию гусеничной платформы 2 может быть установлена система десантирования левая 46 и система десантирования правая 47.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в конструкцию системы запуска мины может быть установлен контейнер с неодимовым магнитом, а в конструкцию гусеничной платформы 2 могут быть установлены контейнер с неодимовым магнитом передний левый 48, контейнер с неодимовым магнитом задний левый 49, контейнер с неодимовым магнитом передний правый 50, контейнер с неодимовым магнитом задний правый 51, установленные соответственно на левом и правом крыльях.
Дополнительная особенность противотанковой мины роботизированной заключается в том, что в конструкцию могут быть установлены всенаправленный микрофон и вибродатчики.
Противотанковая мина роботизированная работает следующим образом.
Перед началом запуска противотанковой мины оператор проверяет и при необходимости заряжает аккумуляторную батарею. От аккумуляторной батареи питаются мотор-колесо левое и мотор-колесо правое, формирующие вращательный момент, передающийся на зубья мотор-колеса левого и мотор- колеса правого, находящихся в сцеплении с цевками гусеничного полотна левого и гусеничного полотна правого и начинает перемещать траки. Таким образом противотанковая мина начинает перемещение вперед или назад. Также от аккумуляторной батареи питаются все энергопотребляемые составные части противотанковой мины.
Противотанковая мина может работать в трех режимах: автономный, полуавтономный и ручной.
В автономном режиме, перед запуском, в микрокомпьютер оператор загружает программу целеуказания, задаются координаты местоположения цели и запускается алгоритм работы мины (машинное обучение и машинное зрение) и противотанковая мина едет к цели.
В полуавтономном режиме противотанковая мина едет в указанные координаты по программе в режиме радиомолчания, что предотвращает возможность перехвата связи и потери управления противотанковой миной, а в момент прибытия противотанковой мины в район цели, оператор берет управления на себя и поражает необходимые цели согласно заданию. Также предусмотрен обратный процесс в полуавтономном режиме, а именно: противотанковая мина в ручном режиме управляется оператором до района цели, а в момент прибытия работает автономно, согласно заданной программе.
Ручной режим работы подразумевает полный контроль оператора от старта движения противотанковой мины до завершения задания по поражению цели.
Дистанционное управление оператором осуществляется при помощи пульта управления с видеоизображением.
В случае переворота противотанковой мины во время движения срабатывает система переворота, а именно, срабатывают линейный привод левый и линейный привод правый, которые с помощью штоков поднимают соответственно крыло левое и крыло правое, тем самым опрокидывая обратно корпус противотанковой мины, что дает возможность беспрепятственно преодолевать крутые подъемы и спуски на местности во время движения и десантирования.
Подрыв противотанковой мины осуществляется путем активизации системы запуска мины, а именно срабатыванием электрогидравлического домкрата, который взводит через пусковой механизм взрыватель мины с требуемой силой. Наличие в пусковом механизме тензодатчика позволяет контролировать работоспособность механизма и определение момента, в котором противотанковая мина переходит в боевое положение.
Использование дополнительных неодимовых магнитов в составе противотанковой мины дает ей возможность примагнититься к металлическому корпусу военной техники противника, переместиться с ней на необходимое расстояние и произвести подрыв противотанковой мины в том районе, где противнику будет нанесен наибольший ущерб.
Заявителем был изготовлен опытный образец противотанковой мины роботизированной со следующими техническими характеристиками:
- масса снаряженная 40 кг;
- масса полезной нагрузки 70 кг;
- максимально разрешенная масса полезной нагрузки 100 кг;
- длина - 700 мм;
- ширина - 400 мм;
- высота - 400 мм;
- номинальная мощность одного мотор-колеса 3000 Вт;
- пиковая мощность одного мотор-колеса 4000 Вт;
- максимальная скорость 80-100 км/ч при нормальных условиях;
- дальность хода на одном заряде в пике 0,075 часа;
- дальность хода на одном заряде при минимальной нагрузке 1,5 часа;
- емкость батареи 10 А⋅ч напряжением 60 В.
Предложенная противотанковая мина роботизированная и его составные части могут быть изготовлены из унифицированных, стандартизированных и покупных составных частей, доступных на отечественном рынке, а также деталей с применением твердых материалов, изготовленных на известном технологическом оборудовании.
Предложенная противотанковая мина роботизированная может использоваться военными, разведкой и специальными подразделениями для дистанционного поражения личного состава противника, минирования и подрыва военной техники, окопов, зданий, сооружений и прочей военной инфраструктуры противника. За счет наличия лидара, тепловизора, стереокамеры, дальномера и видеокамеры с прожектором противотанковая мина роботизированная может также использоваться для проведения патрульных и разведочных операций, наблюдения за передвижением военной техники и личного состава врага в любое время суток и условиях окружающей среды.
Таким образом, предлагаемая противотанковая мина роботизированная, позволяет получить компактное, вездеходное, универсальное для военных целей устройство, с возможностью нанесения большого ущерба противнику.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ПЛАТФОРМА ТРАНСПОРТИРОВКИ ЛЮДЕЙ И ГРУЗОВ | 2024 |
|
RU2836942C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
Противотанковая мина роботизированная состоит из рамы сборной, гусеничной платформы, мины, системы запуска мины, прижима мины, металлоискателя, блока контроля, ультразвукового дальномера левого переднего, ультразвукового дальномера левого центрального, ультразвукового дальномера левого заднего, ультразвукового дальномера правого переднего, ультразвукового дальномера правого центрального, ультразвукового дальномера правого заднего, антенны ГЛОНАСС/GPS. Технический результат - повышение эффективности применения минных боеприпасов, избирательность поражения, высокая проходимость, малая шумность, легкость управления, многозадачность и возможность использования большой номенклатуры минных боеприпасов. 9 з.п. ф-лы, 9 ил.
1. Противотанковая мина роботизированная, состоящая из рамы сборной, гусеничной платформы, мины, системы запуска мины, прижима мины, металлоискателя, блока контроля, ультразвукового дальномера левого переднего, ультразвукового дальномера левого центрального, ультразвукового дальномера левого заднего, ультразвукового дальномера правого переднего, ультразвукового дальномера правого центрального, ультразвукового дальномера правого заднего, антенны ГЛОНАСС/GPS, при этом рама сборная состоит из крышки корпуса аккумулятора с ваттметром аккумуляторной батареи и корпуса аккумулятора, внутри которого размещены аккумуляторная батарея, микрокомпьютер с цифровым гироскопом, приемо-передатчиком видеосигнала и радиомодемом, модуль управления аккумуляторной батареей (BMS), контроллер двойного двигателя, зарядное устройство, а гусеничная платформа состоит из мотор-колеса левого, мотор-колеса правого, ведомого колеса левого, ведомого колеса правого, гусеничного полотна левого, гусеничного полотна правого, бампера левого, бампера правого, ручки транспортировочной, жестко закрепленной к бамперу левому и бамперу правому, системы переворота, состоящей в свою очередь из линейного привода левого, линейного привода правого, крыла левого и крыла правого, а блок контроля, прикрепленный к системе запуска мины, включает лидар, корпус блока и установленные в нем стереокамеру, тепловизор, дальномер, видеокамеру с прожектором, а система запуска мины состоит из домкрата электрогидравлического, трубы опорной, прижима домкрата и пускового механизма с тензодатчиком.
2. Противотанковая мина по п. 1, отличающаяся тем, что в состав оборудования могут входить маскировочные комплекты и маски.
3. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в качестве боеприпаса может быть установлена противотанковая мина семейства ТМ-62.
4. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в качестве боеприпаса может быть установлена противотанковая мина ТМ-72.
5. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в качестве боеприпаса может быть установлена противотанковая мина ТМ-89.
6. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в качестве боеприпаса может быть установлена мина семейства ПМН.
7. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в качестве боеприпаса может быть установлена унифицированная дымовая шашка УДШ.
8. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в конструкцию гусеничной платформы может быть установлена система десантирования левая и система десантирования правая.
9. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в конструкцию системы запуска мины может быть установлен контейнер с неодимовым магнитом, а в конструкцию гусеничной платформы могут быть установлены контейнер с неодимовым магнитом передний левый, контейнер с неодимовым магнитом задний левый, контейнер с неодимовым магнитом передний правый, контейнер с неодимовым магнитом задний правый, установленные соответственно на левом и правом крыльях.
10. Противотанковая мина по любому из пп. 1 или 2, отличающаяся тем, что в конструкцию могут быть установлены всенаправленный микрофон и вибродатчики.
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| CN 106393049 B, 12.03.2019 | |||
| RU 214742 U1, 11.11.2022 | |||
| CN 107511813 A, 26.12.2017 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

