Настоящее изобретение относится к антенной технике с подвижным облучателем и неподвижным отражающим параболическим зеркалом, которое предназначено для приема информационных потоков с любых космических объектов, таких как спутник, пилотируемый космический аппарат, телеметрия стартующего космического корабля, космические аппараты далекого космоса и т.п.
В настоящее время существует большое разнообразие конструкций наземных спутниковых антенн. Зеркальные антенны представляют собой наиболее распространенный класс спутниковых антенн.
Широко используемой конструкцией механической или электромеханической антенны для приема сигналов со спутника является антенна с подвижным отражателем (антенным зеркалом).
Такое решение требует сложного механизма, перемещающего всю конструкцию антенны, особенно если зеркало антенны имеет многометровую апертуру. Кроме этого, наклоненное зеркало антенны обладает большой парусностью, что приводит к необходимости использовать ветрозащитные радиопрозрачные сферы и колпаки.
Также существуют способы перемещения облучателя в фокальной плоскости антенного зеркала, которое неподвижно зафиксировано. Данное решение позволяет облегчить и упростить конструкцию антенны.
Например, из документа US 5751254 А известен механизм перемещения облучателя и система управления многолучевой антенны, осуществляющей слежение за спутниками с геостационарной орбиты. В данной антенне облучатели перемещаются в неплоской фокальной плоскости антенны спутниковой связи с помощью механических устройств. Также предусмотрена возможность сопровождения спутника в некоторых пределах с помощью перемещения облучателя в неплоской фокальной плоскости антенны спутниковой связи по рельсовому пути.
Недостатком данной конструкции является то, что антенна содержит два отражателя и несколько облучателей, вследствие чего значительно утяжеляется ее конструкция. Кроме этого утяжеляет конструкцию каркас антенны, который несет функцию опорной конструкции для двух отражателей и являющийся средством для перемещения облучателей.
Часть вышеперечисленных проблем решены в антенной системе (US 6204822 B1), предназначенной для осуществления связи между наземной станцией и спутником. Данная антенная система представляет собой систему широкополосной спутниковой связи для работы в сантиметровом и миллиметровом диапазонах длин волн. Антенная система содержит одно или несколько сферических антенных зеркал, представляющих собой усеченные сферические поверхности, и взаимодействующие с ними подвижные облучатели, осуществляющие механическое сканирование. Функционирование облучателя осуществляется за счет двухосного позиционирующего механизма.
Недостатком данной антенны является то, что оси механизма позиционирования располагаются в нескольких плоскостях относительно плоскости зеркала, вследствие чего при перемещении облучателя возрастает сложность управления механизмом позиционирования, и, таким образом, возрастает вероятность возникновения ошибок при сканировании. Кроме этого, в случае использования одной антенны обеспечивается сканирование только узкого участка траектории спутника в течение непродолжительного времени, т.к. форма зеркала антенны, представляющего собой сферическое зеркало, характеризуется большой высотой, а конструкция механизма позиционирования производит неполное облучение поверхности сферического зеркала. В случае использования нескольких антенных зеркал утяжеляется конструкция и усложняется установка антенной системы.
Общим недостатком всех вышеперечисленных антенн приема спутникового сигнала является наличие высокоточных механических устройств перемещения облучателей в фокальной плоскости параболического зеркала антенны. Кроме этого при большой апертуре отражающего зеркала требуются сложные и громоздкие конструктивные решения для точного взаимного расположения механизмов перемещения облучателя и конфигурации отражающего зеркала. Это все не позволяет использовать антенны в качестве быстро собираемых мобильных комплексов приема спутникового сигнала и устанавливать их на мобильных носителях, например, расположенных на борту корабля.
Для создания мобильных комплексов приема сигнала с космических объектов авторами изобретения, вместо конструктивно сложных механических устройств перемещения облучателя в фокальной плоскости параболического зеркала, предлагается использовать летательный аппарат – дрон, который может разнообразными способами позиционировать себя с высокой точностью в пространстве и переносить облучатель – приемник радиосигнала, с обрабатывающей сигнал аппаратурой, который или по кабелю, или по Wi-Fi, или на карту памяти, или любым иным путем передает информацию в центр обработки сигнала с любого космического объекта, как то: спутник, пилотируемый космический аппарат, телеметрия стартующего космического корабля, космические аппараты далекого космоса. При этом любое изменение положения плоскости отражения зеркала может автоматически быть учтено в полетной программе дрона. Представленное техническое решение позволяет упростить не только конструкцию антенны, но и значительно упростить ее монтаж, настройку и обслуживание.
Технический результат направлен на создание мобильного антенного комплекса приема сигнала космических объектов, для которого не требуется настройка (горизонтирование) поверхности зеркала и используется облучатель, который механически не связан с несущей конструкцией зеркала.
Технический результат достигается использованием летательного аппарата – дрона, на котором установлена система пространственного позиционирования, облучатель, малошумящий усилитель, система дешифрирования и записи принятого сигнала с космического объекта, при этом дрон перемещает облучатель в соответствии с фокусным расстоянием отражающего зеркала, положением зеркала относительно поверхности Земли и координатами космического объекта (азимут и высота).
Работа мобильного комплекса приема данных с космических объектов поясняется фиг. 1 и 2.
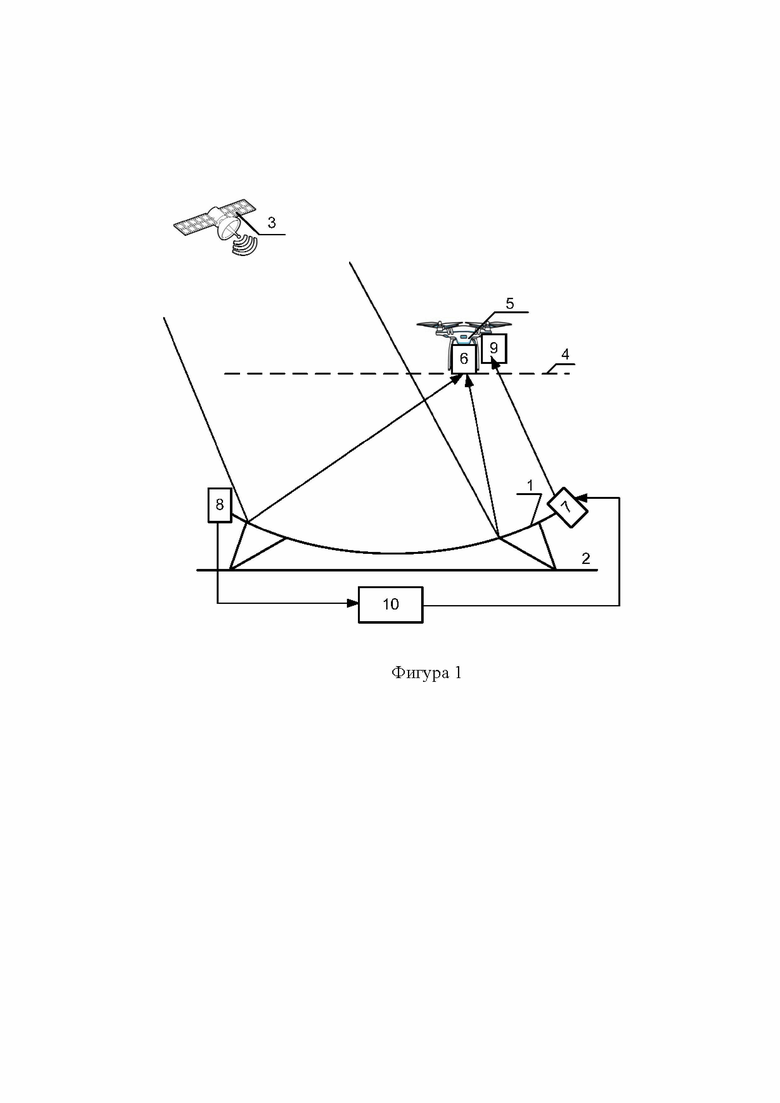
На фиг. 1 представлена блок-схема работы мобильного комплекса приема данных с космических объектов при установке зеркала антенны на поверхность Земли, где
1 - параболическое зеркало;
2 - поверхность Земли;
3 - космический объект;
4 - фокальная плоскость;
5 - дрон;
6 - облучатель;
7 - узел позиционирования;
8 - датчик угла горизонта;
9 - узел координации;
10 – ЭВМ.
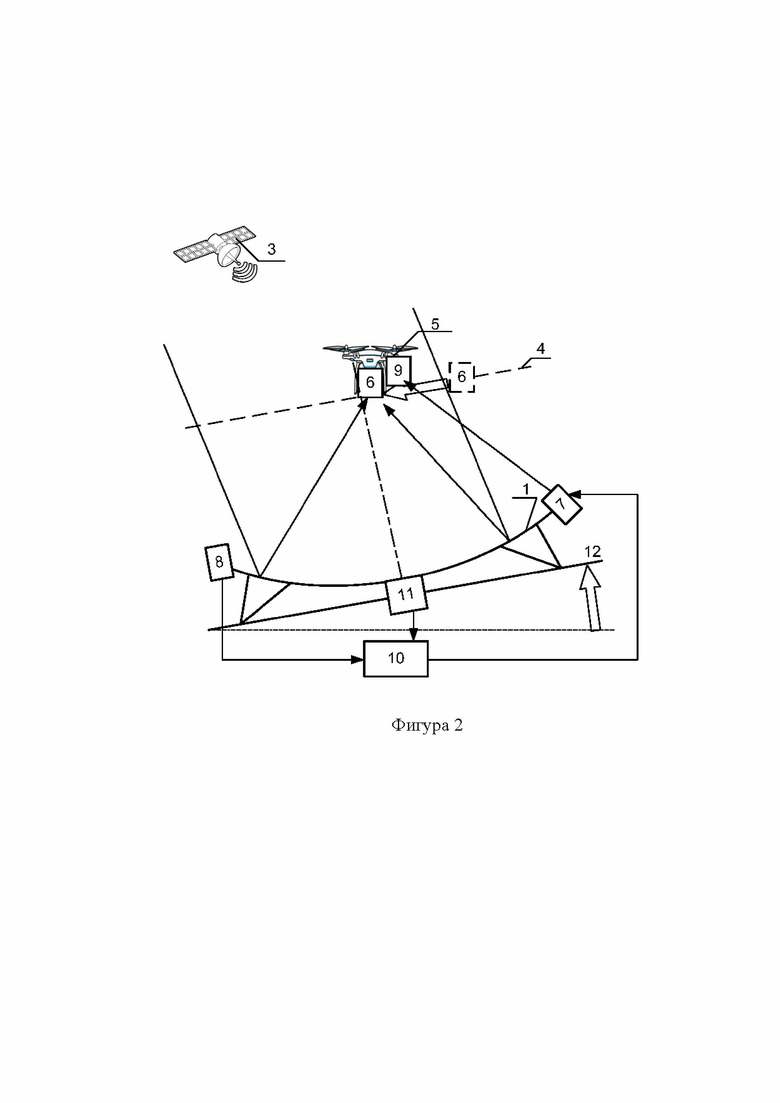
На фиг. 2 представлена блок-схема работы мобильного комплекса приема данных с космических объектов при установке зеркала антенны на мобильный объект.
Вся масса радиотелескопов с параболической антенной большого диаметра представляет собой точно сориентированное по сторонам света и горизонту зеркало антенны и перемещаемый в фокальной плоскости зеркала с помощью тросов, рельс и т.п. облучатель – приемник радиосигналов. При наведении станции приема на спутник или иную космическую цель вычисляются координаты космического источника сигнала – азимут и высота, осуществляется корректировка координат с учетом горизонта и азимута параболического зеркала антенны и в рассчитанную таким образом в точку на фокальной плоскости зеркала перемещается облучатель для приема сигнала с космической цели.
Авторами предлагается вместо сложных и массивных механических устройств перемещения облучателя использовать дрон, который может переносить облучатель в фокальной плоскости зеркала, а для его точного наведения на космический объект, с которого необходимо принимать радиосигнал, использовать систему позиционирования дрона, которая жестко связана с зеркалом и использует информацию об ориентации по сторонам света и углах отклонения от горизонтальной плоскости зеркала.
В качестве системы позиционирования дрона с облучателем в пространстве можно использовать триангуляционные оптические методы, лазерные сканеры, ультразвуковые датчики и т.п. Точность предлагаемых методов позиционирования может достигать 10 угловых секунд или ±5,0 мм, что с избытком превосходит требуемую точность позиционирования.
В связи с вышеизложенным авторами предлагается мобильный комплекс приема данных с космических объектов, состоящий из параболического зеркала и облучателя, принимающего сигнал космического объекта, при этом облучатель перемещается в необходимую точку фокальной плоскости зеркала с помощью дрона и двух связанных между собой узлов - узла позиционирования дрона, жестко связанного с зеркалом комплекса, и узла координации, расположенного на дроне, при этом позиционирование дрона осуществляется в зависимости от координат космического объекта – азимута и высоты, а также углов положения зеркала относительно горизонта, которые определяются с помощью датчиков угла горизонта зеркала, при этом узел позиционирования управляется с помощью ЭВМ.
Мобильный комплекс приема данных с космических объектов (далее - Комплекс) работает следующим образом, параболическое зеркало 1 Комплекса устанавливается на поверхности Земли 2 произвольным образом. С помощью датчика углов горизонта 8 поверхности зеркала 1 в ЭВМ 10 передается информация об углах горизонтирования зеркала. Также в ЭВМ заносится информация об угле ориентации на Север (азимут) Комплекса, который можно определить компасом, ГЛОНАСС-навигатором или по ориентирам с известными координатами. При расчете траектории дрона в фокальной плоскости зеркала Комплекса необходимо также знать информацию о координатах пролета космического объекта 3 над Комплексом – азимут и высота для данной точки поверхности Земли от времени пролета. Такие данные общедоступны и их тоже заносят в ЭВМ 10. Дрон 5 с облучателем 6 (приемником радиосигнала космического объекта) располагается на стартовой площадке, где по любому каналу связи на него передается информация о координатах в фокальной плоскости 4 зеркала 1 Комплекса в зависимости от времени. При подлете космического объекта 3 к Комплексу дрон 5 с облучателем 6 и узлом координации 9 взлетает со стартовой площадки и начинает свой пролет в фокальной плоскости зеркала. В качестве узла координации 9 может использоваться фотоприемник, видеокамера, ультразвуковые датчики и т.п. Координаты положения дрона, куда он должен перемещаться, задаются узлом позиционирования дрона 7, в качестве которого могут использоваться лазерный сканер, светодиодные или графические оптические метки, вертикальные и горизонтальные стенки известной конфигурации и т.п. Точность лазерного позиционирования может достигать величины 10 угловых секунд, что, например, при фокусном расстоянии зеркала 1 м дает точность 50 мкм, что явно избыточно. Ультразвуковые методы дают точность ±5 мм, что вполне достаточно для качественного приема радиосигнала. При пролете космического объекта над Комплексом дрон с облучателем синхронно перемещается в фокальной плоскости зеркала с учетом координат космического объекта, положения зеркала относительно горизонта и ориентации Комплекса по сторонам света, и принимает полезный радиосигнал из космоса.
Так работает Комплекс, расположенный на стационарной поверхности – крышах домов, мостах или на поверхности Земли. При установке Комплекса на мобильные объекты, например, корабль, он работает по другому алгоритму. Необходимо дополнительно использовать датчик разворота Комплекса относительно направления на Север.
В связи с вышеизложенным авторами предлагается второй вариант мобильного комплекса приема данных с космических объектов, состоящий из параболического зеркала и облучателя, принимающего сигнал космического объекта, при этом облучатель перемещается в необходимую точку фокальной плоскости зеркала с помощью дрона и двух связанных между собой узлов - узла позиционирования дрона, жестко связанного с зеркалом комплекса, и узла координации, расположенного на дроне, при этом позиционирование дрона осуществляется в зависимости: от координат космического объекта – азимута и высоты; от углов положения зеркала относительно горизонта, которые определяются с помощью датчика угла горизонта; от направления на Север, которое определяется с помощью датчика ориентации относительно сторон света; и от географических координат, которые определяются с помощью датчика географических координат; при этом узел позиционирования управляется с помощью ЭВМ.
Комплекс на мобильных объектах работает следующим образом, смотри фиг. 2, параболическое зеркало 1 Комплекса устанавливается на поверхности мобильного объекта произвольным образом, при этом настройка Комплекса осуществляется на неподвижном относительно поверхности Земли мобильном объекте. Заранее записывать информацию о траектории дрона 5 в фокальной плоскости зеркала 1 не имеет смысла, так как объект, на котором стоит Комплекс, подвижный, и траектория полета дрона должна корректироваться непрерывно в зависимости от качаний объекта и разворотов его относительно сторон света и изменения его географических координат. При расчете траектории дрона в фокальной плоскости зеркала Комплекса необходимо:
1. Знать информацию о координатах пролета космического объекта 3 над Комплексом – азимут и высоту для данной точки поверхности Земли от времени пролета.
2. Корректировать эти данные в зависимости от изменения географических координат Комплекса, которые можно получить из навигационной системы мобильного объекта 11.
3. Знать изменение углов горизонта зеркала, которые поступают в ЭВМ с датчика углов горизонта.
4. Знать ориентацию Комплекса по сторонам света (на Север), для чего необходимо сориентировать Комплекс относительно конструкционных осей мобильного объекта 12, а затем принимать на ЭВМ данные об изменении курса объекта с навигационной системы мобильного объекта 11.
Все эти данные непрерывно поступают в ЭВМ 10, и автоматически происходит корректировка траектории пролета дрона в фокальной плоскости зеркала Комплекса.
При такой организации управления дроном система позиционирования дрона Комплекса уже не может использовать ультразвуковые датчики и оптические маяки. Работает только система лазерного сканирования. В связи с чем, на дроне могут быть установлены три фотоприемника при сканировании двумя ортогональными лазерными плоскостями, либо один фотоприемник при телеметрической лазерной развертке узлом позиционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| СПОСОБ ФОРМИРОВАНИЯ КЛАСТЕРНЫХ ЗОН ОБЛУЧАЮЩЕЙ РЕШЕТКОЙ МНОГОЛУЧЕВОЙ ГИБРИДНОЙ ЗЕРКАЛЬНОЙ АНТЕННЫ | 2014 |
|
RU2578289C1 |
| УСИЛИТЕЛЬНАЯ ЛИНЗА ДВУХЗЕРКАЛЬНОЙ АНТЕННЫ | 2011 |
|
RU2520914C2 |
| Низкопрофильная составная спутниковая антенна | 2023 |
|
RU2807961C1 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| АНТЕННАЯ СИСТЕМА | 1993 |
|
RU2065236C1 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| МНОГОЛУЧЕВАЯ ОДНОЗЕРКАЛЬНАЯ АНТЕННА ДЛЯ ПРИЕМА СИГНАЛОВ СО СПУТНИКОВ, НАХОДЯЩИХСЯ НА КРАЮ ВИДИМОГО СЕКТОРА ГСО | 2011 |
|
RU2446523C1 |
| АНТЕННОЕ УСТРОЙСТВО С ЛИНЕЙНОЙ ПОЛЯРИЗАЦИЕЙ | 2005 |
|
RU2282287C1 |
| НЕНАКЛОННАЯ МНОГОЛУЧЕВАЯ ДИАПАЗОННАЯ ДВУХЗЕРКАЛЬНАЯ АНТЕННА | 2017 |
|
RU2664870C1 |
Заявленное изобретение относится к области создания мобильных комплексов приема данных с космических аппаратов дистанционного зондирования Земли. Сущность предлагаемого технического решения заключается в том, что в качестве устройства перемещения облучателя в фокальной плоскости параболического зеркала антенного комплекса используется беспилотный летательный аппарат (БПЛА) с установленным на нём облучателем - приёмником радиосигнала, передающим в центр приёма данных информацию с космических аппаратов. При этом изменение положения плоскости отражения зеркала учитывается в полетной программе БПЛА. Представленное техническое решение позволяет упростить конструкцию антенного комплекса, а также его монтаж, настройку и обслуживание. 2 н.п. ф-лы, 2 ил.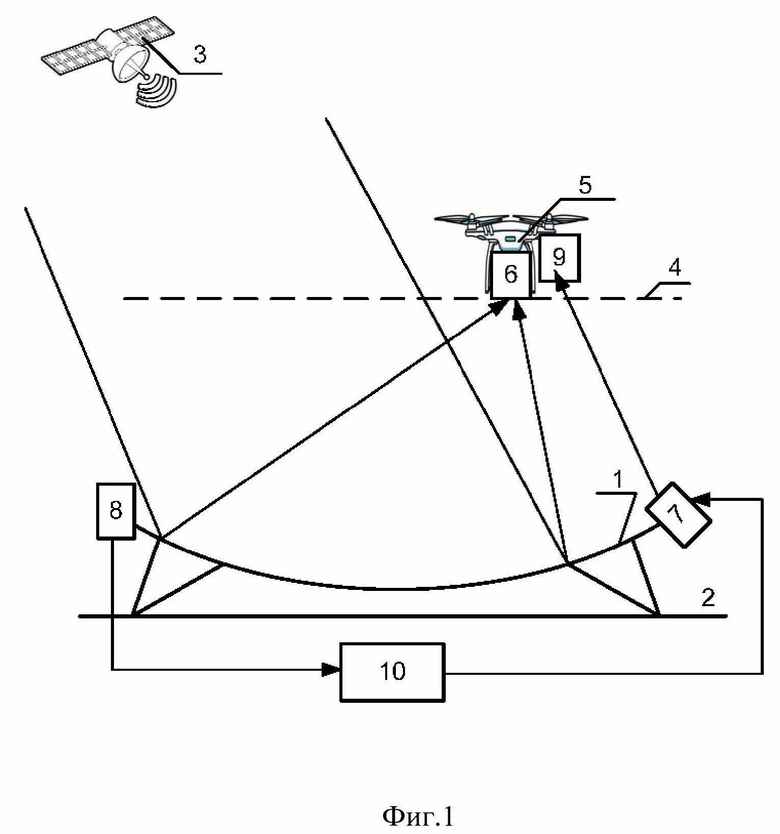
1. Мобильный комплекс приема данных с космических объектов, состоящий из параболического зеркала и облучателя, принимающего сигнал космического объекта, отличающийся тем, что облучатель перемещается в необходимую точку фокальной плоскости зеркала с помощью дрона и двух связанных между собой узлов - узла позиционирования дрона, жестко связанного с зеркалом комплекса, и узла координации, расположенного на дроне, при этом позиционирование дрона осуществляется в зависимости от координат космического объекта - азимута и высоты, а также углов положения зеркала относительно горизонта, которые определяются с помощью датчиков угла горизонта зеркала, при этом узел позиционирования управляется с помощью ЭВМ.
2. Мобильный комплекс приема данных с космических объектов, состоящий из параболического зеркала и облучателя, принимающего сигнал космического объекта, отличающийся тем, что облучатель перемещается в необходимую точку фокальной плоскости зеркала с помощью дрона и двух связанных между собой узлов - узла позиционирования дрона, жестко связанного с зеркалом комплекса, и узла координации, расположенного на дроне, при этом позиционирование дрона осуществляется в зависимости: от координат космического объекта - азимута и высоты; от углов положения зеркала относительно горизонта, которые определяются с помощью датчика угла горизонта; от направления на Север, которое определяется с помощью датчика ориентации относительно сторон света; и от географических координат, которые определяются с помощью датчика географических координат; при этом узел позиционирования управляется с помощью ЭВМ.
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| Многофункциональная космическая система Союзного государства | |||
| М.: НИИ КС, 2007 г., стр.205-207 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6204822 B1, 20.03.2001 | |||
| US 5751254 A, 12.05.1998. | |||

