Предлагаемое антенное устройство с линейной поляризацией относится к устройствам с изменяющейся ориентацией и/или формой диаграммы направленности волн, излучаемых антенной, при неподвижном активном элементе (облучателе) и при подвижном отражающем устройстве (зеркале);
Оно предназначено для
- измерения ускорений, скоростей, расстояний, угловых положений подвижного носителя антенного устройства, азимута и угла места (наклона) визируемых объектов;
- измерения данных для формирования сигналов стабилизации и управления подвижным носителем антенного устройства и может быть использовано в системах:
- пеленгации и автосопровождения объектов визирования (подвижных и/или неподвижных) по направлению и по дальности;
- определения навигационных параметров взаимного положения, например, подвижного носителя антенного устройства и объекта визирования (подвижного или неподвижного) при их сближении;
- локационных с повышенными угловой разрешающей способностью, точностью, дальностью действия и помехозащищенностью;
- обеспечения управления и самонаведения подвижных носителей антенного устройства на объект визирования не только при их локационном контакте, но и при его отсутствии.
Известна антенна (патент Великобритании №2254737, МКИ5 H 01 Q 15/08), предназначенная для работы в ИК и миллиметровом диапазонах длин волн. Конструкция обеспечивает соосность приемопередатчика с линзой, что позволяет наблюдать одно и то же изображение в ИК и миллиметровом диапазонах через общую апертуру.
Известны антенные устройства, содержащие два рефлектора с соответствующим взаимным расположением (патент Германии №4200755, МКИ5 H 01 Q 19/19; патент Японии №4-64201, H 01 Q 19/195). Эта устройства предназначены для спутниковой связи.
Известны антенные системы с двойным отражателем (патент США №5198827, МКИ5 H 01 Q 3/20; патент ЕПВ №0514886, МКИ5 H 01 Q 3/20), в которых осуществляется сканирование луча вращением субрефлектора.
Из известных аналогов наиболее близким по технической сущности и назначению является антенное устройство У505-0102 головного модуля У505Э (разработка предприятия) изделия Х-31АЭ в экспортном исполнении (AB1.000.126ПС - технический паспорт "Модуль У505Э", АВ2.092.191К3 - кинематическая схема антенны У505-0102).
По максимальному количеству сходных существенных признаков оно выбрано за прототип.
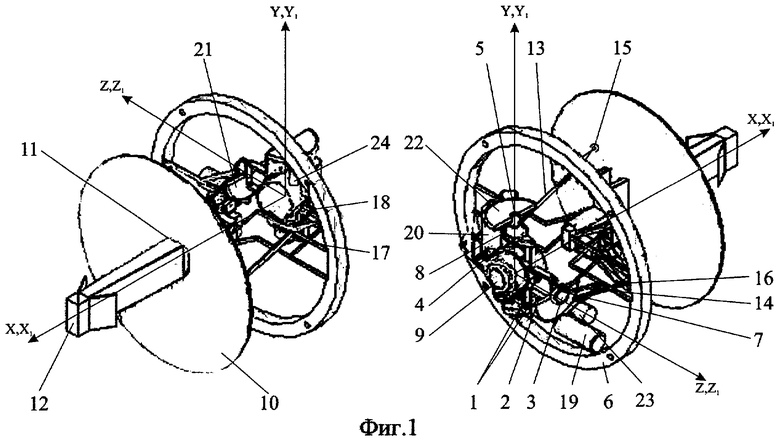
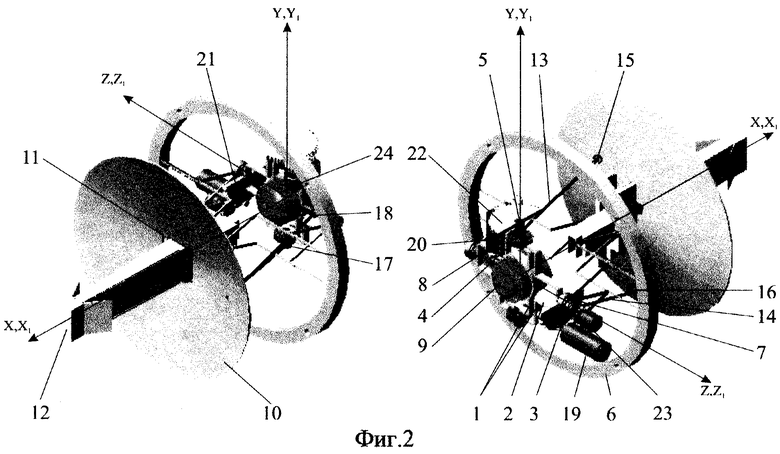
Антенное устройство-прототип (фиг.1, фиг.2) содержит двухосный карданов подвес 1, который состоит из наружной рамки 2 с осью вращения 3 и внутренней рамки 4 с осью вращения 5. Ось вращения 3 наружной рамки 2 установлена на основании 6 антенного устройства с помощью подшипников 7. При этом основание 6 антенного устройства жестко закреплено в корпусе подвижного носителя антенного устройства.
Ось вращения 5 внутренней рамки 4 установлена ортогонально к оси вращения 3 наружной рамки 2 и закреплена в ней с помощью подшипников 8.
Ось 3 является осью вращения двухосного карданова подвеса 1 в плоскости угла наклона относительно основания 6 антенного устройства, а ось 5 является осью вращения двухосного карданного подвеса 1 в плоскости азимута относительно наружной рамки 2.
Внутри рамки 4 закреплен управляемый трехстепенной гироскоп 9 так, что кинетический момент ротора гироскопа 9 в заарретированном положении гироскопа 9 совпадает с нулевым направлением линии (вектора) визирования антенного устройства.
Параболическое зеркало 10 устройства-прототипа имеет возможность вращения в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 11 относительно центра излучения неподвижного многоканального облучателя 12 (обратного облучения), жестко закрепленного на основании 6 антенного устройства.
Параболическое зеркало 10 соединено посредством первой тяги 13 с внутренней рамкой 4 двухосного карданова подвеса 1 и второй тяги 14 с наружной рамкой 2 двухосного карданова подвеса 1. При этом первая тяга 13 и вторая тяга 14 с помощью шарниров 15 и 16 закреплены соответственно на параболическом зеркале 10 и с помощью шарниров 17 и 18 закреплены соответственно на внутренней рамке 4 и на наружной рамке 2 двухосного карданова подвеса 1. Причем расстояние между каждым из шарниров 15 и 16, размещенных на зеркале 10, и центром вращения зеркала 10 в два раза больше расстояния между каждым из шарниров 17 и 18, установленных на наружной рамке 2 и на внутренней рамке 4 двухосного карданова подвеса 1 соответственно, и центром вращения последних.
Устройство-прототип также содержит два стабилизирующих и одновременно управляемых электродвигателя 19 и 20, каждый из которых связан электрически с усилителями, на вход которых поступают сигналы управления, пропорциональные углам поворота линии (вектора) визирования антенного устройства соответственно по углу наклона и по азимуту. Каждый из электродвигателей 19 и 20 механически с помощью соответствующих редукторов 21 и 22 связан с осью вращения 3 наружной рамки 2 и с осью вращения 5 внутренней рамки 4 двухосного карданова подвеса 1 антенного устройства-прототипа.
Кроме этого, в состав антенного устройства-прототипа входят датчики 23 и 24 углов поворота наружной рамки 2 и внутренней рамки 4 антенного устройства, установленные соответственно на основании 6 и на наружной рамке 2 двухосного карданова подвеса 1, связанные механически каждый с помощью редукторов соответственно с осью вращения 3 наружной рамки 2 и с осью вращения 5 внутренней рамки 4.
Повороты линии (вектора) визирования антенного устройства по углу наклона и по азимуту необходимы для ее ориентации на объект визирования относительно основания 6, что обеспечивается путем поворотов соответственно наружной рамки 2 и внутренней рамки 4. Для этого используется явление прецессии двухканального управляемого трехстепенного гироскопа 9.
Если приложить некоторый момент, обусловленный либо отклонением основания 6 антенного устройства, либо обусловленный подачей управляющего сигнала на датчик момента гироскопа 9, к внешней рамке гироскопа 9, то внутренняя его рамка, а следовательно, ось ротора гироскопа 9 и линия (вектор) визирования начнет прецессировать с угловой скоростью, пропорциональной приложенному моменту, являющейся угловой скоростью вращения в инерциальном пространстве, т.е. в инерциальной системе координат.
Аналогично, если приложить момент к внутренней рамке гироскопа 9, ось ротора гироскопа 9, а следовательно, линия (вектор) визирования начнет прецессировать в плоскости, перпендикулярной к оси вращения внешней рамки гироскопа 9 с угловой скоростью вращения в инерциальной системе координат.
При этом ось гироскопа, т.е. направление кинетического момента его ротора, все время совпадает с линией (вектором) визирования антенного устройства-прототипа.
Прецессионные отклонения рамок гироскопа 9 измеряют датчики углов прецессии (ДУП), размещенные на соответствующих осях вращения рамок гироскопа 9. По информации ДУП формируются управляющие сигналы, поступающие через усилители соответственно на электродвигатели 19 и 20. Электродвигатели 19 и 20 под воздейством управляющих сигналов отклоняют стабилизированную линию (вектор) визирования по углу наклона и по азимуту путем поворота наружной рамки 2 и внутренней рамки 4 относительно основания 6 антенного устройства.
Так как параболическое зеркало 10 соединено посредством тяги 13 с внутренней рамкой 4 и с помощью тяги 14 с наружной рамкой 2 двухосного карданова подвеса 1, то вращение рамок 2 и 4 передается параболическому зеркалу 10 благодаря шарнирному креплению тяги 13 и тяги 14 на зеркале 10 с помощью шарниров 15 и 16 и на соответствующих рамках 2 и 4 с помощью шарниров 17 и 18. При этом вследствие того, что расстояние между каждым из шарниров 15 и 16, размещенных на зеркале 10, и центром вращения зеркала 10 в два раза больше расстояния между каждым из шарниров 17 и 18, установленных на наружной 2 и внутренней 4 рамках двухосного карданова подвеса 1 соответственно, и центром их вращения, углы прокачки рамок 2 и 4 почти в два раза больше соответствующих углов прокачки зеркала 10.
Параболическое зеркало 10 при этом вращается с помощью двухстепенного шарнира 11 относительно центра излучения неподвижного многоканально облучателя 12 (обратного облучения), жестко закрепленного на основании 6 антенного устройства.
Облучатель 12 состоит из четырех каналов, симметрично расположенных относительно фокальной точки антенны. Антенное устройство, содержащее многоканальный облучатель 12, создает одновременно попарно четыре диаграммы направленности излучения с частично перекрывающимися лепестками в двух взаимно перпендикулярных плоскостях. Переключение антенны от передатчика на прием производиться антенным переключателем, входящим в состав волноводного тракта антенного устройства.
Отраженные от объекта визирования импульсы принимаются каждой парой каналов облучателя 12, причем волноводный тракт антенного устройства обеспечивает переключение каждой пары каналов по определенному закону так, что отраженные от объекта визирования импульсы принимаются одновременно на два канала облучателя 12, связанные между собой, с которых одновременно снимаются суммарный и разностный сигналы при амплитудой пеленгации объекта визирования. При этом суммарный сигнал диаграмм направленности соответствует сумме двух парциальных диаграмм, а разностный - их разности.
В суммарной диаграмме ось параболического зеркала 10 - направление максимума приема отраженной электромагнитной энергии, в разностной диаграмме - направление нулевого приема электромагнитной энергии.
Так как оптическая ось параболического зеркала 10 является равносигнальным направлением антенного устройства, то при вращении рамок 2 и 4 двухосного карданова подвеса 1 обеспечивается вращение параболического зеркала 10 относительно неподвижного облучателя 12 на углы наклона  и азимута
и азимута  почти в 2 раза меньшие, чем углы вращения рамок 2 и 4 соответственно, и тем самым обеспечивается ориентация равносигнального направления (иначе, линии визирования) на объект визирования. Повороты наружной рамки 2 и внутренней рамки 4 двухосного карданова подвеса 1, механически связанные с параболическим зеркалом 10, регистрируются соответствующими датчиками угла 23 и 24, которые преобразуют углы поворота линии (вектора) визирования в двух взаимно перпендикулярных плоскостях по углу наклона εН и по азимуту εA относительно основания 6 антенного устройства в соответствующие напряжения, которые в свою очередь передаются в аппаратуру управления подвижного носителя антенного устройства.
почти в 2 раза меньшие, чем углы вращения рамок 2 и 4 соответственно, и тем самым обеспечивается ориентация равносигнального направления (иначе, линии визирования) на объект визирования. Повороты наружной рамки 2 и внутренней рамки 4 двухосного карданова подвеса 1, механически связанные с параболическим зеркалом 10, регистрируются соответствующими датчиками угла 23 и 24, которые преобразуют углы поворота линии (вектора) визирования в двух взаимно перпендикулярных плоскостях по углу наклона εН и по азимуту εA относительно основания 6 антенного устройства в соответствующие напряжения, которые в свою очередь передаются в аппаратуру управления подвижного носителя антенного устройства.
Устройство-прототип не отвечает предъявляемым к бортовым системам самонаведения, предназначенным для оснащения высокоточных подвижных носителей, современным требованиям, так как обладает следующими основными недостатками:
- не обеспечивает необходимую точность самонаведения носителя из-за отсутствия информации о проекциях вектора абсолютной угловой скорости вращения линии визирования, а также информации о проекциях вектора кажущегося линейного ускорения линии (вектора) визирования антенного устройства в антенной (базовой) системе координат;
- недостаточная угловая разрешающая способность для решения задачи самонаведения подвижного носителя антенного устройства на подвижные объекты визирования с малой эффективной поверхностью рассеивания;
- недостаточная помехозащищенность в условиях мешающих воздействий при работе антенного устройства в одном диапазоне рабочих волн излучения;
- конструктивно ограничены углы прокачки наружной и внутренней рамок двухосного карданова подвеса антенного устройства из-за переменной электрической редукции между углами поворота параболического зеркала относительно центра излучения неподвижного облучателя и соответствующими углами поворота линии визирования антенного устройства, что в свою очередь ограничивает углы наклона траектории (а также тангажа) подвижного носителя антенного устройства, снижая его тактические характеристики.
Целью предлагаемого технического решения является обеспечение повышенных точности самонаведения носителя, угловой разрешающей способности бортовой системы самонаведения, ее помехозащищенности в условиях мешающих воздействий при одновременном расширении углов прокачки рамок антенного устройства по углу наклона и но азимуту.
Поставленная цель достигается тем, что в антенное устройство, содержащее двухосный карданов подвес, параболическое зеркало, имеющее возможность вращения с помощью двухстепенного шарнира относительно центра излучения неподвижного многоканального облучателя, жестко закрепленного на основании антенного устройства, и соединенное шарнирно закрепленными тягами соответственно с внутренней и наружной рамками двухосного карданного подвеса, два электродвигателя, соединенные электрически с усилителями, на вход которых поступают сигналы управления, и механически каждый соединен с осями вращения внутренней и наружной рамками карданова подвеса, а также датчики углов поворота наружной и внутренней рамок карданного подвеса, установленные соответственно на основании антенного устройства и на наружной рамке карданова подвеса, связанные механически с осями вращения наружной и внутренней рамок, вновь введены двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентные акселерометра с взаимно ортогональными осями чувствительности, ось чувствительности одного из которых совпадает в зааретированном положении с нулевым направлением линии визирования антенного устройства, а также дополнительно установлено жестко связанное с основанием антенного устройства диаметром в несколько раз меньшее по сравнению с параболическим зеркалом малое гиперболическое решетчатое зеркало, один из фокусов которого (дальний по отношению к параболическому зеркалу) совпадает с фокусом параболического зеркала. В другом фокусе малого гиперболического зеркала (ближнем по отношению к параболическому зеркалу) размещен центр излучения неподвижного многоканального облучателя прямого облучения основного диапазона волн с линейной поляризацией, совпадающей с направлением проводников, образующих решетку малого гиперболического зеркала. При этом реализуется схема Кассегрена для канала основного диапазона волн. В дальнем фокусе малого гиперболического зеркала установлен центр излучения многоканального, связанного жестко с основанием антенного устройства неподвижными волноводами, соединяющимися с волноводным трактом антенного устройства, облучателя более коротковолнового диапазона волн (по сравнению с основным диапазоном) с линейной ортогональной поляризацией по отношению к направлению проводников решетки малого гиперболического зеркала.
При этом одна из осей чувствительности двухканального гироскопического ДУС в заарретированном положении совпадает с нулевым направлением линии визирования антенного устройства, а другая ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса, причем кинетический момент ротора гироскопического ДУС в заарретированном положении совпадает с положительным направлением оси вращения наружной рамки карданова подвеса. При этом в предлагаемом техническом решении расстояние между каждым из шарниров тяг, размещенных на параболическом зеркале, и его центром вращения равны расстоянию между каждым из шарниров, установленных соответственно на наружной и внутренней рамках двухосного карданова подвеса, и центром вращения этих рамок. Причем на вход усилителей электродвигателей поступают сигналы управления, пропорциональные углам поворота параболического зеркала, соответственно по углу наклона и по азимуту  , являющиеся функциями углов поворота по углу наклона εН и по азимуту εA предварительно юстированной на совмещение линии визирования основного и встроенного более коротковолнового диапазона волн, от внешнего по отношению к антенному устройству цифрового вычислительного устройства, где реализуются алгоритмы
, являющиеся функциями углов поворота по углу наклона εН и по азимуту εA предварительно юстированной на совмещение линии визирования основного и встроенного более коротковолнового диапазона волн, от внешнего по отношению к антенному устройству цифрового вычислительного устройства, где реализуются алгоритмы
Введение указанных признаков повышает точность, угловую разрешающую способность и помехозащищенность системы самонаведения.
Это достигается путем встраивания более коротковолнового диапазона по отношению к основному диапазону волн. Совмещение линии визирования основного и встроенного диапазонов волн обеспечивает ориентацию осей чувствительности акселерометров и гироскопических приборов в антенной (базовой) системе координат независимо от работы того или иного диапазонов волн.
Работа на встроенном более коротковолновом диапазоне волн повышает угловую разрешающую способность.
Повышение точности системы достигается компенсацией несанкционированных линейных перемещений основания антенного устройства относительно объекта визирования. Это обеспечивается путем измерения проекций вектора кажущегося линейного ускорения и проекций вектора абсолютной угловой скорости линии визирования.
Полученная информация позволяет определить во внешнем цифровом вычислительном устройстве параметры вектора визирования, которые затем используются для формирования сигналов стабилизации подвижного носителя антенного устройства в горизонтальной и вертикальной плоскостях, по крену, а также сигналов самонаведения, пропорциональных перегрузкам в вертикальной и горизонтальной плоскостях, реализующих принятый закон управления подвижным носителем антенного устройства.
При этом достигается тактическая помехозащищенность инерпиального определения параметров вектора визирования в антенной (базовой) системе координат по информации гироскопических приборов и акселерометров, установленных во внутренней рамке двухстепенного карданова подвеса антенного устройства.
Одновременно с этим расширяется диапазон углов наклона траектории (а также тангажа) подвижного носителя антенного устройства за счет равенства плеч тяг, соединяющих параболическое зеркало соответственно с внутренней и наружной рамками двухосного карданова подвеса, что обеспечивает повышение тактико-технических характеристик бортовой системы наведения носителя.
Из уровня техники не выявлено решений, имеющих признаки, совпадающие с отличительными признаками предлагаемого антенного устройства, поэтому можно считать, что предложенное техническое решение соответствует условию изобретательского уровня.
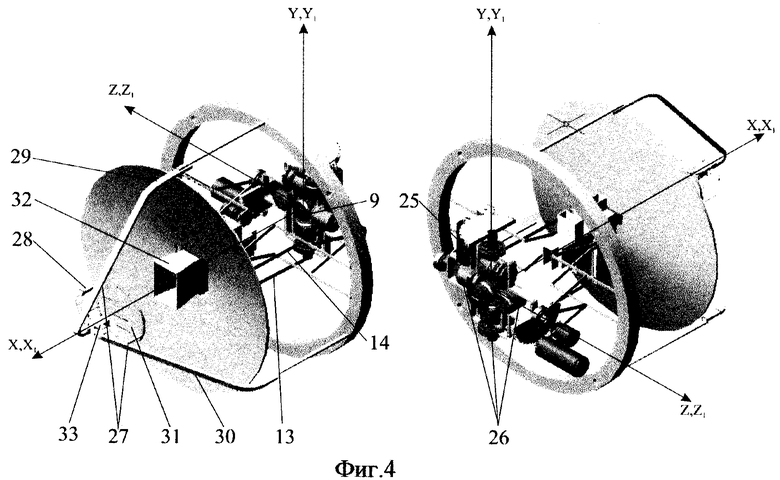
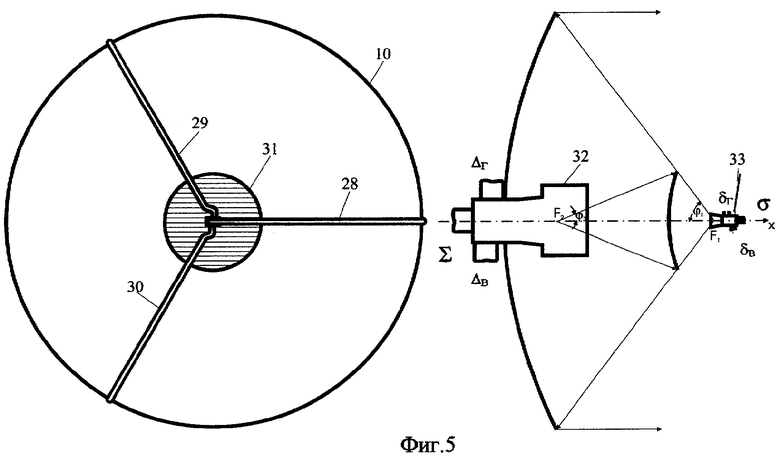
Сущность изобретения поясняется чертежами, где на фиг.1 и 2 представлена кинематическая схема прототипа, на фиг.3 и 4 - кинематическая схема предлагаемого устройства, на фиг.5 - представлена оптическая схема предлагаемого устройства.
Предлагаемое антенное устройство с линейной поляризацией (фиг.3 и 4) так же, как и прототип, содержит двухосный карданов подвес 1, который состоит из наружной рамки 2 с осью вращения 3 и внутренней рамки 4 с осью вращения 5. Ось вращения 3 наружной рамки 2 установлена с помощью подшипников 7 на основании 6 антенного устройства, жестко связанного с корпусом подвижного носителя. Ось вращения 5 внутренней рамки 4 установлена с помощью подшипников 8 в наружной рамке 2 перпендикулярно к ее оси вращения 3.
Ось 3 является осью вращения двухстепенного карданова подвеса 1 в плоскости угла наклона относительно основания 6 антенного устройства, а ось 5 является осью вращения двухстепенного карданова подвеса 1 в плоскости азимута относительно наружной рамки 2.
Внутри рамки 4 закреплен управляемый трехстепенной гироскоп 9 так, что его кинетический момент в заарретированном положении гироскопа 9 совпадает с нулевым направлением линии визирования антенного устройства.
Параболическое зеркало 10 имеет возможность вращения в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 11 относительно центра излучения неподвижного многоканального облучателя прямого облучения, жестко закрепленного на основании 6 антенного устройства.
Параболическое зеркало 10 соединено посредством первой тяги 13 с внутренней рамкой 4 двухосного карданова подвеса 1 и второй тяги 14 с его наружной рамкой 2. Обе тяги 13 и 14 с помощью шарниров 15 и 16 закреплены соответственно на параболическом зеркале 10, а с помощью шарниров 17 и 18 закреплены соответственно на внутренней 4 и на наружной рамке 2 двухосного карданова подвеса 1. Расстояние между каждым из шарниров 15 и 16 соответствующих тяг 13 и 14, размещенных на параболическом зеркале 10, и центром вращения параболического зеркала 10 равны расстоянию между каждым из шарниров 17 и 18, установленных соответственно на наружной рамке 2 и на внутренней рамке 4 двухосного карданова подвеса 1, и центром вращения рамок, что почти в 2 раза уменьшает углы прокачки рамок 2 и 4 двухосного карданова подвеса по сравнению с устройством-прототипом.
Это в свою очередь не накладывает ограничения на углы наклона траектории (а также тангажа) подвижного носителя предлагаемого антенного устройства, т.е. повышает тактико-технические характеристики подвижного носителя.
Антенное устройство содержит также два электродвигателя 19, 20, на вход которых, как указано выше, поступают усиленные сигналы управления, пропорциональные углам поворота параболического зеркала 10 соответственно по углу наклона и по азимуту  , являющиеся функциями углов поворота по углу наклона εН и азимуту εA предварительно юстированной на совмещение линии (вектора) визирования основного и более коротковолнового диапазона волн предлагаемого антенного устройства, причем эти сигналы управления формируются во внешнем цифровом вычислительном устройстве.
, являющиеся функциями углов поворота по углу наклона εН и азимуту εA предварительно юстированной на совмещение линии (вектора) визирования основного и более коротковолнового диапазона волн предлагаемого антенного устройства, причем эти сигналы управления формируются во внешнем цифровом вычислительном устройстве.
Каждый из электродвигателей 19 и 20 механически с помощью соответствующих редукторов 21 и 22 связан с осью вращения 3 наружной рамки 2 и осью вращения 5 внутренней рамки 4 двухосного карданова подвеса 1.
Датчики 23 и 24 углов поворота наружной 2 и внутренней 4 рамок двухосного карданова подвеса 1 по углу наклона и по азимуту  (фиг.3 и 4.) установлены соответственно на основании 6 антенного устройства и на наружной рамке 2 двухосного карданова подвеса 1, связанные механически с помощью редукторов соответственно с осью вращения 3 наружной рамки 2 и осью вращения 5 внутренней рамки 4.
(фиг.3 и 4.) установлены соответственно на основании 6 антенного устройства и на наружной рамке 2 двухосного карданова подвеса 1, связанные механически с помощью редукторов соответственно с осью вращения 3 наружной рамки 2 и осью вращения 5 внутренней рамки 4.
В отличие от прототипа в предлагаемое антенное устройство введены двухканальный гироскопический датчик угловой скорости (ДУС) 25, три акселерометра с взаимно ортогональными осями 26, а также жестко связанное с помощью юстировочных механизмов 27 с основанием 6 антенного устройства неподвижными волноводами 28, 29, 30 малое гиперболическое зеркало 31, диаметр которого в несколько (например, в четыре) раз меньше диаметра параболического зеркала 10. Один из фокусов (дальний по отношению к параболическому зеркалу 10) совпадает с фокусом F1 параболического зеркала 10 (фиг.5). В другом фокусе F2 малого гиперболического зеркала 31 (ближнем по отношению к параболическому зеркалу 10) размещен центр излучения неподвижного многоканального облучателя 32 (прямого облучателя) основного диапазона волн с линейной поляризацией, совпадающей с направлением проводников, образующих решетку малого гиперболического зеркала 31. При этом реализуется схема Кассегрена (двухзеркальная) для основного диапазона волн.
В дальнем фокусе F1 малого решетчатого гиперболического зеркала 31 установлен центр излучения многоканального связанного жестко с основанием 6 антенного устройства и соединенного с помощью волноводов 28, 29, 30 с волноводным трактом антенного устройства, облучателя 33 (прямого облучения) более коротковолнового диапазона (по сравнению с основным диапазоном облучателя 32) с линейной ортогональной поляризацией по отношению к направлению проводников малого решетчатого гиперболического зеркала 31.
Двухканальный гироскопический ДУС 25 установлен во внутренней рамке 4 двухосного карданова подвеса 1 так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым положением линии (вектора) визирования антенного устройства, а другая ось чувствительности ориентирована вверх вдоль положительного направления оси вращения 5 внутренней рамки 4, при этом кинетический момент ротора гироскопического ДУС 25 совпадает с положительным направлением оси вращения 3 наружной рамки 2 двухосного карданова подвеса 1.
Ось чувствительности одного из трех вновь введенных акселерометров 26 совпадает в заарретированном положении с нулевым направлением линии (вектора) визирования антенного устройства.
Работа предлагаемого антенного устройства осуществляется следующим образом.
Усиленные сигналы управления подаются на соответствующие двигатели 19 и 20, связанные механически с помощью соответствующих редукторов 21 и 22 с осью 3 наружной рамки 2 и с осью вращения 5 внутренней рамки 4 карданова подвеса 1 предлагаемого антенного устройства.
Повороты наружной рамки 2 и внутренней рамки 4 двухосного карданова подвеса 1, механически связанные с параболическим зеркалом 10, регистрируются соответствующими датчиками угла 23 и 24, которые преобразуют углы поворота параболического зеркала 10 в двух взаимно перпендикулярных плоскостях по углу наклона и по азимуту относительно основания предлагаемого антенного устройства в соответствующие напряжения. Эти напряжения в свою очередь передаются во внешнее цифровое вычислительное устройство, где в функции от этих углов формируются сигналы εН и εА:

пропорциональные углам поворота линии (вектора) визирования по углу наклона εН и по азимуту εA относительно основания 6 предлагаемого антенного устройства, которые соответствуют сигналам управления положением линии (вектора) визирования. Полученные во внешнем цифровом вычислительном устройстве сигналы после их функционального преобразования согласно принятому закону наведения из внешнего цифрового вычислительного устройства передаются в аппаратуру управления подвижного носителя предлагаемого антенного устройства.
Кроме того, размещение во внутренней рамке 4 двухосного карданного подвеса 1 предлагаемого антенного устройства гироинерциальных датчиков информации, а именно двухканального управляемого трехстепенного гироскопа 9, двухканального гироскопического датчика угловой скорости 25 и трех однокомпонентных акселерометров 26 обеспечивает при движении основания 6 вместе с подвижным носителем, на котором оно жестко установлено, формирование сигналов, пропорциональных соответственно проекциям вектора абсолютной угловой скорости вращения и проекциям вектора кажущегося линейного ускорения движения параболического зеркала 10 в системе координат, связанной с параболическим зеркалом 10.
Полученные сигналы передаются во внешнее цифровое вычислительное устройство, где формируются сигналы, пропорциональные соответственно проекциям вектора абсолютной угловой скорости вращения и проекциям вектора кажущегося линейного ускорения движения линии (вектора) визирования антенного устройства в антенной (базовой) системе координат.
При этом двухканальный управляемый трехстепенной гироскоп 9 является в предлагаемом антенном устройстве не только чувствительным и исполнительным элементом гироследящего привода параболического зеркала 10, но и чувствительным датчиком информации, которая совместно с информацией других гироинерциальных датчиков 25 и 26 используется во внешнем цифровом вычислительном устройстве для формирования сигналов автономного самонаведения подвижного носителя антенного устройства на точку прицеливания и/или на объект визирования.
В предлагаемом антенном устройстве отсутствуют ограничения на диапазон углов прокачки наружной рамки 2 и внутренней рамки 4 двухосного карданова подвеса 1 в рабочем диапазоне углов отклонения линии (вектора) визирования относительно основания 6. Это в свою очередь расширяет углы наклона траектории (а также тангажа), что позволяет повысить тактико-технические характеристики подвижного носителя предлагаемого антенного устройства.
Так как размеры антенного устройства-прототипа и предлагаемого технического решения являются ограниченными и одинаковыми, то повышение разрешающей способности обеспечивается переходом в более короткий диапазон рабочих волн излучения.
Выбор рабочей частоты излучения более короткого диапазона определяется необходимостью обеспечения основных характеристик бортовой системы самонаведения носителя, куда входит составной частью антенное устройство, для решения тактической задачи самонаведения подвижного носителя в условиях противодействия с учетом условий эксплуатации и технико-экономических факторов.
Поэтому при переходе на более коротковолновый диапазон рабочих волн излучения для обеспечения основных характеристик системы, содержащей антенное устройство с облучателем основного диапазона волн излучения, сохраняется его диапазон рабочих волн излучения как основной, и путем встраивания более короткого диапазона рабочих волн излучения в предлагаемом антенном устройстве удовлетворяются следующие основные требования, предъявляемые к выбору второго (более коротковолнового) диапазона волн:
- существенное повышение угловой разрешающей способности;
- повышение помехозащищенности работы системы;
- обеспечение кратности полуволн диапазонов для возможности работы под одним общим обтекателем;
- увеличение поглощения на трассе движения носителя в условиях наличия гидрометеоров не должно уменьшать дальности действия системы более чем на 40...70% при номинальной расчетной дальности, например, 15...20 км.
Угловая разрешающая способность бортовой системы самонаведения носителя предлагаемого антенного устройства улучшается в 4 раза, если в качестве основного диапазона рабочих волн излучения, например, принят X-диапазон волн, а в качестве встроенного (более коротковолнового) принят Ка-диапазон волн при использовании одной и той же апертуры антенны X-диапазона волн.
При использовании в качестве встроенного Ка-диапазона волн заметно возрастают эффективные поверхности рассеяния (ЭПР) объектов визирования и коэффициент усиления (КУ) антенны предлагаемого устройства. Например, ЭПР кораблей возрастает в 5...15 раз, КУ антенные 4 раза, при этом возрастают потери в тракте и сверхвысокочастотных (СВЧ) узлах антенного устройства приблизительно в 4 раза. Это увеличение ЭПР и КУ компенсирует основной недостаток Ка-диапазона рабочих волн излучения, а именно снижение дальности действия в сложных метеоусловиях, поскольку затухание на трассе движения носителя, особенно при наличии гидрометеоров, увеличивается по мере уменьшения длины волны. При этом в условиях сближения носителя предлагаемого антенного устройства с объектом визирования дальность сближения естественным образом уменьшается, что уменьшает негативное влияние данного недостатка Ка-диапазона рабочих волн излучения на дальность действия системы, даже при увеличении интенсивности дождя, например, до 4 мм/час и 6 мм/час.
Сочетание, например. Х- и Ка-диапазонов рабочих волн излучения в предлагаемом антенном устройстве обеспечивает конструктивное встраивание более коротковолнового диапазона рабочих волн излучения в антенную систему основного диапазона с использованием:
- общей максимально возможной апертуры антенны (общего параболического зеркала 10);
- общей для обоих диапазонов устройств управления и стабилизации линии (вектора) визирования;
- общей схемы обработки отраженных сигналов от объектов визирования;
- идентичной юстировки;
- общего обтекателя.
При этом может быть выбран обтекатель для предлагаемого антенного устройства, который обеспечивает возможность работы одновременно в двух, например, Х- и Ка-диапазонах рабочих волн излучения с потерями порядка 2...3 дБ и девиацией луча 12...14 угл.мин, что допустимо для работы бортовой системы самонаведения носителя в обоих диапазонах рабочих волн излучения.
При использовании в качестве основного диапазона рабочих волн излучения, например Х-диапазона, а в качестве встроенного использование Ка-диапазона диаметр малого гиперболического решетчатого зеркала 31 составляет менее 0,25 диаметра параболического зеркала 10 (фиг.5). поэтому затеняющее воздействие малого зеркала 31 в канале Х-диапазона является вполне допустимым для предлагаемого антенного устройства.
В предлагаемом техническом решении реализуется возможность совмещения обоих диапазонов в общей для этих диапазонов оптической схеме параболического зеркала 10 антенного устройства.
При этом волноводные схемы высокочастотного тракта обоих диапазонов выполняются по схеме скрытого электронного сканирования.
Таким образом, предлагаемое техническое решение обеспечивает достижение положительного эффекта, заключающегося в следующем.
За счет использования во внешнем цифровом вычислительном устройстве информации управляемого трехстепенного гироскопа 9, являющегося чувствительным и исполнительным элементом гироследящего привода антенного устройства и чувствительным элементом инерциального измерителя параметров вектора визирования, использования информации двухканального гироскопического датчика угловой скорости 25 и трех однокомпонентных акселерометров 26 в составе внутренней рамки 4 двухосного карданова подвеса 1 параболического зеркала 10 удается реализовать во внешнем по отношению к предлагаемому антенному устройству цифровом вычислительном устройстве алгоритм работы инерциального измерителя параметров вектора визирования в антенной (базовой) системе координат.
Тем самым обеспечиваются требуемые повышенные точность наведения носителя предлагаемого антенного устройства и помехозащищенность бортовой системы самонаведения. Одновременно с этим обеспечивается автономное самонаведение носителя на объект визирования.
За счет обеспечения в предлагаемом антенном устройстве двухдиапазонности рабочих волн излучения (например, Х-диапазона и встроенного более коротковолнового Ка-диапазона) достигается повышенная угловая разрешающая способность бортовой системы самонаведения, особенно при решении задачи самонаведения подвижного носителя предлагаемого антенного устройства на объекты визирования (подвижные и/или неподвижные) с малой эффективной поверхностью рассеяния и при наличии гидрометеоров на трассе движения носителя.
Кроме того, при переходе с одного диапазона волн излучения на другой также повышается помехозащищенность системы в условиях радиоэлектронного противодействия.
За счет равенства расстояний между каждым из шарниров 15 и 16 тяг 13 и 14, размещенных на параболическом зеркале 10, и его центром вращения расстоянию между каждым из шарниров 22 и 23, установленных соответственно на наружной 2 и внутренней 4 рамках двухосного карданова подвеса 1, и центром вращения рамок в предлагаемом антенном устройстве обеспечивается в рабочем диапазоне углов примерно в два раза большие углы прокачки наружной 2 и внутренней 4 рамок двухосного карданова подвеса 1. Тем самым существенно расширяется диапазон углов наклона траекторий (а также тангажа) подвижного носителя предлагаемого антенного устройства, повышая при этом его тактические характеристики.
Аппаратная реализация инерциального измерителя параметров вектора визирования в антенной (базовой) системе координат на базе предлагаемого технического решения и внешнего по отношению к антенному устройству цифрового вычислительного устройства, как показывают исследования, проведенные авторами предлагаемого технического решения, исключает необходимость использования в составе подвижного носителя не только дорогостоящей классической инерциальной системы навигации, но и радиовысотомера.
Благодаря этому освобождается существенный объем отсека подвижного носителя для использования его, либо для увеличения полезной нагрузки, либо для увеличения массы топлива для двигателя подвижного носителя и тем самым для увеличения его дальности действия.
Изобретение относится к антенной технике. Технический результат заключается в повышении точности самонаведения носителя, угловой разрешающей способности и помехозащищенности системы самонаведения в условиях мешающих воздействий при одновременном расширении углов прокачки. Сущность изобретения состоит в том, что антенное устройство с линейной поляризацией содержит двухосный карданов подвес, во внутренней рамке которого установлен управляемый трехстепенной гироскоп, причем внутренняя и наружная рамки подвеса механически с помощью жестких тяг и шарниров соединены с параболическим зеркалом, имеющим возможность вращения относительно центра излучения неподвижного многоканального облучателя, жестко закрепленного на основании антенного устройства, два электродвигателя вращения соответствующих рамок карданова подвеса, управляемые сигналами, формируемыми во внешнем цифровом вычислительном устройстве, датчики углов поворота наружной и внутренней рамок, установленные соответственно на основании антенного устройства и на наружной рамке карданова подвеса. Введены двухканальный гироскопический датчик угловой скорости (ДУС), установленный на внутренней рамке карданова подвеса, три однокомпонентных акселерометра с взаимно ортогональными осями чувствительности, установленные во внутренней рамке карданова подвеса, малое гиперболическое решетчатое зеркало, установленное с помощью котировочных механизмов и неподвижных волноводов на основании антенного устройства, его дальний по отношению к параболическому зеркалу фокус совпадает с фокусом параболического зеркала, в другом его фокусе размещен центр излучения неподвижного многоканального облучателя прямого облучения основного диапазона с линейной поляризацией, совпадающей с направлением проводников, образующих решетку малого гиперболического зеркала. Центр излучения неподвижного многоканального облучателя прямого облучения более коротковолнового диапазона волн с ортогональной поляризацией по отношению к направлению проводников решетки малого гиперболического зеркала установлен в дальнем фокусе малого гиперболического решетчатого зеркала. Механическая связь наружной и внутренней рамок двухосного карданова подвеса с параболическим зеркалом обеспечивает равенство соответствующих углов поворота рамок и зеркала относительно основания антенного устройства. 5 ил.
Антенное устройство с линейной поляризацией, содержащее двухосный карданов подвес, состоящий из наружной рамки, ось вращения которой установлена с помощью подшипников на основании антенного устройства, жестко связанного с корпусом подвижного носителя антенного устройства, и внутренней рамки с установленным в ней управляемым трехстепенным гироскопом, кинетический момент которого совпадает в заарретированном положении с нулевым направлением линии визирования антенного устройства, причем ось вращения внутренней рамки установлена с помощью подшипников в наружной рамке перпендикулярно к оси вращения последней, параболическое зеркало, имеющее возможность вращения с помощью двухстепенного шарнира относительно центра излучения неподвижного многоканального облучателя, жестко закрепленного на основании антенного устройства, соединенное посредством первой тяги с внутренней рамкой и второй тяги с наружной рамкой двухосного карданова подвеса, при этом первая и вторая тяги шарнирно закреплены на параболическом зеркале антенного устройства и соответственно на наружной и внутренней рамках двухосного карданова подвеса, два электродвигателя, управляемые сигналами, пропорциональными углам поворота линии визирования по азимуту и по углу наклона, механически связанные каждый с осью вращения наружной рамки и с осью вращения внутренней рамки двухосного карданова подвеса, а также датчики углов поворота наружной и внутренней рамок, установленные соответственно на основании антенного устройства и на наружной рамке двухосного карданова подвеса, связанные механически с осью вращения наружной рамки и с осью вращения внутренней рамки, отличающееся тем, что во внутренней рамке двухосного карданова подвеса антенного устройства установлены вновь введенные двухканальный гироскопический датчик угловой скорости (ДУС) так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, причем кинетический момент ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки, и три однокомпонентных акселерометра с взаимно ортогональными осями чувствительности, ось чувствительности одного из которых совпадает в заарретированном положении с нулевым направлением линии визирования антенного устройства, при этом в антенном устройстве с помощью юстировочных механизмов, жестко связанных неподвижными волноводами с основанием антенного устройства, дополнительно установлено диаметром в несколько раз меньшее по сравнению с параболическим зеркалом малое гиперболическое решетчатое зеркало, дальний по отношению к параболическому зеркалу фокус которого совпадает с фокусом параболического зеркала, а в ближнем размещен центр излучения неподвижного многоканального облучателя прямого облучения основного диапазона волн с линейной поляризацией, совпадающей с направлением проводников, образующих решетку малого гиперболического зеркала, в дальнем фокусе малого гиперболического зеркала установлен центр излучения многоканального, связанного жестко с основанием антенного устройства с помощью неподвижных волноводов, соединяющихся с волноводным трактом антенного устройства, облучателя более коротковолнового диапазона волн по сравнению с основным диапазоном с линейной ортогональной поляризацией по отношению к направлению проводников решетки малого гиперболического зеркала, при этом расстояние между каждым из шарниров тяг, размещенных на параболическом зеркале, и центром вращения параболического зеркала равны расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданного подвеса, и центром вращения этих рамок, причем на вход электродвигателей поступают сигналы управления от внешнего цифрового вычислительного устройства, пропорциональные углам поворота параболического зеркала соответственно по углу наклона и по азимуту, являющиеся функциями углов поворота по углу наклона и по азимуту предварительно юстированной на совмещение линии визирования основного и встроенного более коротковолнового диапазона волн антенного устройства.
| Способ получения целлюлозы из стеблей хлопчатника | 1912 |
|
SU505A1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |
| US 5198827 A, 30.03.1993 | |||
| DE 4200755, 15.07.1993. | |||

