ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству для приготовления пищи и способу приготовления пищи.
УРОВЕНЬ ТЕХНИКИ
Хорошо известно, что желательно контролировать уровни загрязнения, например, уровни твердых частиц. Известны различные измерительные устройства, которые, например, обеспечивают уровень концентрации частиц для частиц меньше определенного размера. Например, известны подходы, связанные с оптическим измерением частиц, основанные на оптическом рассеянии.
Промышленность, домохозяйства, легковые и грузовые автомобили выделяют сложные смеси загрязняющих воздух веществ, многие из которых вредны для здоровья. Из всех этих загрязняющих веществ наибольшее влияние на здоровье человека оказывают тонкодисперсные частицы. Большинство тонкодисперсных частиц возникают в результате сжигания топлива как от подвижных источников, таких как транспортные средства, так и от неподвижных источников, таких как электростанции, промышленность, домохозяйства или сжигание биомассы.
Настоящее изобретение относится, в частности, к конкретным загрязняющим веществам, возникающим в результате приготовления пищи (т.е. сжигания биомассы). Хорошо известно, что при приготовлении пищи образуются нежелательные запахи и частицы, и для удаления этих запахов и частиц используют вытяжные вентиляторы.
Тонкодисперсные частицы связаны с широким спектром острых и хронических заболеваний, таких как рак легких, хроническая обструктивная болезнь легких (ХОБЛ) и сердечно-сосудистые заболевания. По оценкам, во всем мире они является причиной около 25% случаев смерти от рака легких, 8% случаев смерти от ХОБЛ и около 15% случаев ишемической болезни сердца и инсульта. Загрязнение твердыми частицами представляет собой проблему санитарного состояния окружающей среды, которая затрагивает людей во всем мире не только на открытом воздухе, но и в помещениях.
Однако не все твердые частицы одинаково вредны для здоровья. Соляные брызги, создаваемые, например, волнами на море, совершенно безвредны. Вред наносят, в частности, тонкодисперсные частицы от горения, которые могут возникнуть, например, в результате сжигания биомассы в процессе приготовления пищи. Следовательно, есть потребность в получении дополнительной информации об этих частицах и, по возможности, в уменьшении образования вредных частиц. Образование вредных частиц при приготовлении пищи также свидетельствует об образовании вредных соединений в самой пище в процессе приготовления.
Известно, что и размер частиц, и гранулометрический состав загрязняющего вещества могут быть использованы для идентификации загрязняющего вещества и, следовательно, причины или источника загрязнения.
Счетчики частиц загрязнения воздуха показывают уровень концентрации частиц PM2,5 или PM10. Они оценивают общий вес взвешенных в воздухе частиц размером до 2,5 мкм или 10 мкм. Эти цифры очень важны, поскольку на них основаны стандарты качества воздуха и нормы качества воздух. Однако эти цифры не дают информацию о типе присутствующих частиц, не говоря уже о влиянии этих частиц на здоровье или происхождении этих частиц.
Следовательно, существует потребность в системе, которая способна характеризовать частицы, в частности, обеспечивать возможность идентификации определенных типов частиц, которые могут представлять риск для здоровья или которые могут указывать на другие вещества, которые сами по себе представляют риск для здоровья, в частности, образованные в процессе приготовления пищи.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Изобретение определено формулой изобретения.
Согласно примерам в соответствии с аспектом изобретения предлагается система для приготовления пищи, содержащая:
блок приготовления пищи и
систему обнаружения частиц для обнаружения частиц, содержащую:
блок измерения частиц для определения концентрации частиц по меньшей мере в двух диапазонах размеров и
контроллер для обработки данных о концентрации частиц,
причем контроллер выполнен с возможностью:
определения одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и
обеспечения, в ответ на определенные одно или более соотношений, выходного сигнала для управления блоком приготовления пищи.
Эта система для приготовления пищи использует функцию автоматического управления при обнаружении пригорания пищи. Это пригорание пищи приводит к появлению характерного профиля распределения плотности частиц, который может быть определен на основании соотношения между частицами, присутствующими в различных диапазонах размеров. Таким образом, вредное воздействие этих частиц может быть предотвращено посредством изменения процесса приготовления пищи. Кроме того, присутствие этих частиц указывает на присутствие вредных веществ, образующихся в пище, таких как акриламид и полициклические ароматические углеводороды. За счет изменения процесса приготовления концентрация этих соединений в пище может быть сведена к минимуму.
Было обнаружено, что использование соотношения концентраций частиц гораздо более эффективно при обнаружении конкретных частиц, образованных в результате подгорания пищи, чем обнаружение абсолютных уровней частиц, поскольку эти абсолютные уровни могут быть связаны со многими неизвестными переменными, такими как расстояние между блоком измерения и блоком приготовления пищи.
В частности, повышенное (относительное) преобладание более мелких частиц свидетельствует о высоких температурах и горении.
Это соотношение представляет собой, например, соотношение между концентрациями для двух разных размеров (и небольшого диапазона вокруг этих размеров), но вместо этого оно может быть получено на основании значений PM (т.е. концентраций для всех частиц вплоть до заданного порогового размера).
Контроллер может быть выполнен с возможностью управления блоком приготовления пищи для прекращения приготовления пищи или изменения настройки температуры блока приготовления пищи. Таким образом, процесс приготовления пищи может быть разработан с возможностью уменьшения или прекращения образования вредных частиц.
Кроме того, контроллер может быть выполнен с возможностью обеспечения, в ответ на определенные одно или более соотношений, выходного сигнала для управления работой воздухоочистителя.
В качестве дополнительной меры можно управлять воздухоочистителем, например включать или приводить в действие повышенную скорость вентилятора, в ответ на обнаружение.
В этом случае система обнаружения частиц может содержать часть воздухоочистителя. Таким образом, существует управляющая связь между воздухоочистителем и блоком приготовления пищи для обеспечения функции автоматического управления безопасностью для блока приготовления пищи.
Первый пороговый размер составляет, например, 0,3 мкм или 0,5 мкм и/или второй пороговый размер составляет, например, 1,0 мкм или 2,5 мкм. Таким образом, примеры возможных соотношений составляют от 0,3 мкм до 1,0 мкм или от 0,3 мкм до 2,5 мкм, или от 0,5 мкм до 1,0 мкм, или от 0,5 мкм до 2,5 мкм. Конечно, это всего лишь примеры, и может быть измерено любое требуемое соотношение, которое наилучшим образом позволяет идентифицировать целевую частицу.
Блок приготовления пищи может содержать мультипечку или тостер. Это два примера блока приготовления пищи, которые могут образовывать и выделять тонкодисперсные частицы.
Система обнаружения частиц может содержать:
оптический датчик, который генерирует сигнал датчика, причем сигнал датчика или анализ сигнала датчика является управляемым посредством применения настройки порогового значения, причем настройка порогового значения задает диапазон определения размера частиц, захватываемый сигналом датчика; и
контроллер,
причем контроллер выполнен с возможностью применения по меньшей мере первой и второй разных настроек порогового значения для определения концентраций частиц в указанных по меньшей мере двух диапазонах размеров и для приема соответствующих первых и вторых показаний оптического датчика.
Подход, связанный с оптическими измерениями, может быть реализован с низкими затратами.
Кроме того, в соответствии с изобретением предлагается способ управления блоком приготовления пищи, включающий:
управление работой блока приготовления пищи для начала приготовления;
определение концентраций частиц по меньшей мере в двух диапазонах размеров;
определение одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и
управление, в ответ на определенные одно или более соотношений, блоком приготовления пищи.
Этот способ обеспечивает автоматическое управление блоком приготовления пищи для уменьшения или предотвращения образования нежелательных твердых частиц.
Управление блоком приготовления пищи может включать прекращение приготовления пищи или изменение настройки температуры блока приготовления пищи.
Кроме того, способ может включать, в ответ на определенные одно или более соотношений, управление работой воздухоочистителя. Таким образом, при помощи данного способа принимают меры по снижению концентрации твердых частиц, которые уже высвобождены, а также по уменьшению или устранению образования этих твердых частиц в будущем.
В этом случае система обнаружения частиц может содержать часть воздухоочистителя, так что есть интегрированный подход к приготовлению пищи и очистке воздуха.
Первый пороговый размер может составлять 0,3 мкм или 0,5 мкм и/или второй пороговый размер может составлять 1,0 мкм или 2,5 мкм.
Приготовление пищи может включать жарку в мультипечке или поджаривание в тостере.
Изобретение может быть реализовано по меньшей мере частично в программном обеспечении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры осуществления изобретения описаны далее подробно со ссылкой на сопроводительные чертежи, на которых:
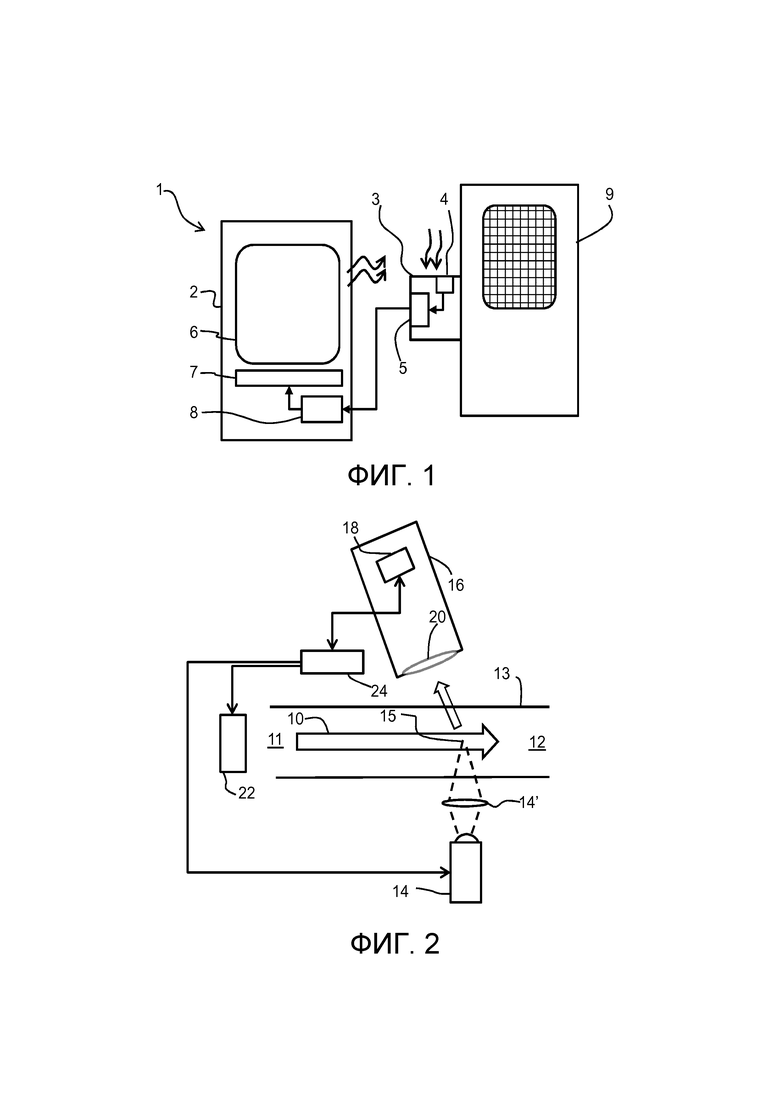
Фиг. 1 изображает систему для приготовления пищи;
Фиг. 2 изображает пример датчика частиц, который может быть использован в системе для приготовления пищи;
Фиг. 3 изображает записанную информацию о концентрации частиц PM 2,5 во время процесса жарки в мультипечке;
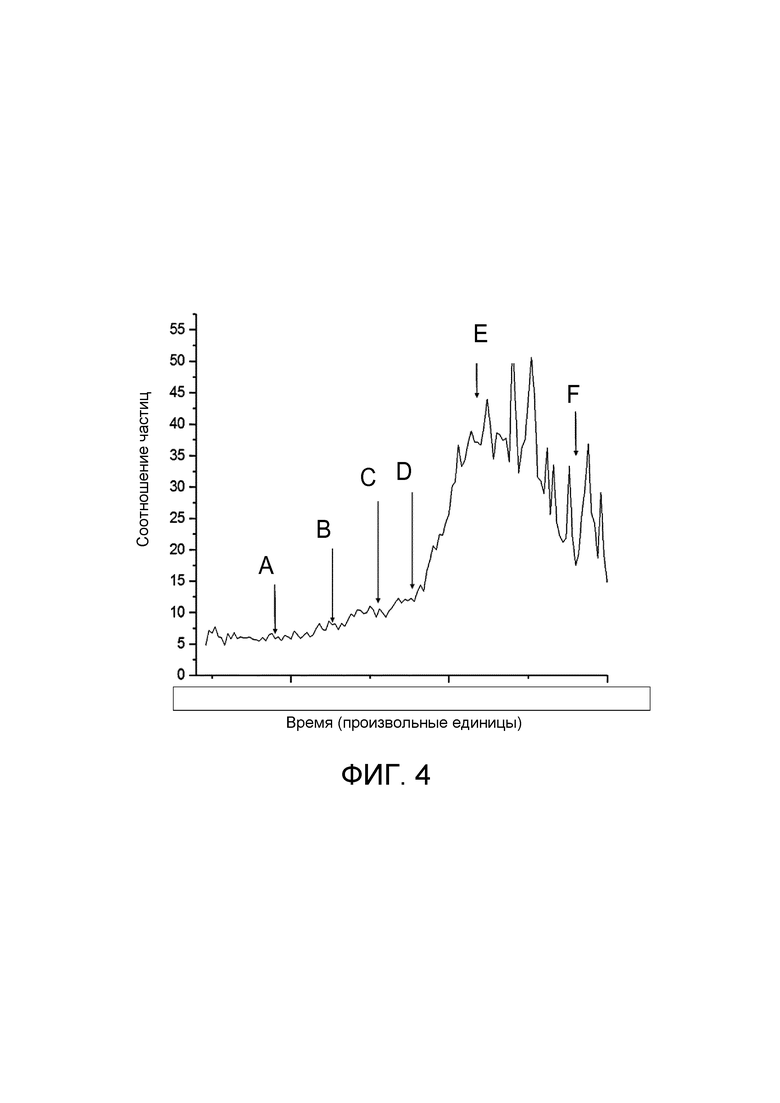
Фиг. 4 изображает график соотношения концентраций между частицами размером 0,5 мкм и частицами размером 1,0 мкм для того же процесса, представленного на Фиг. 3; и
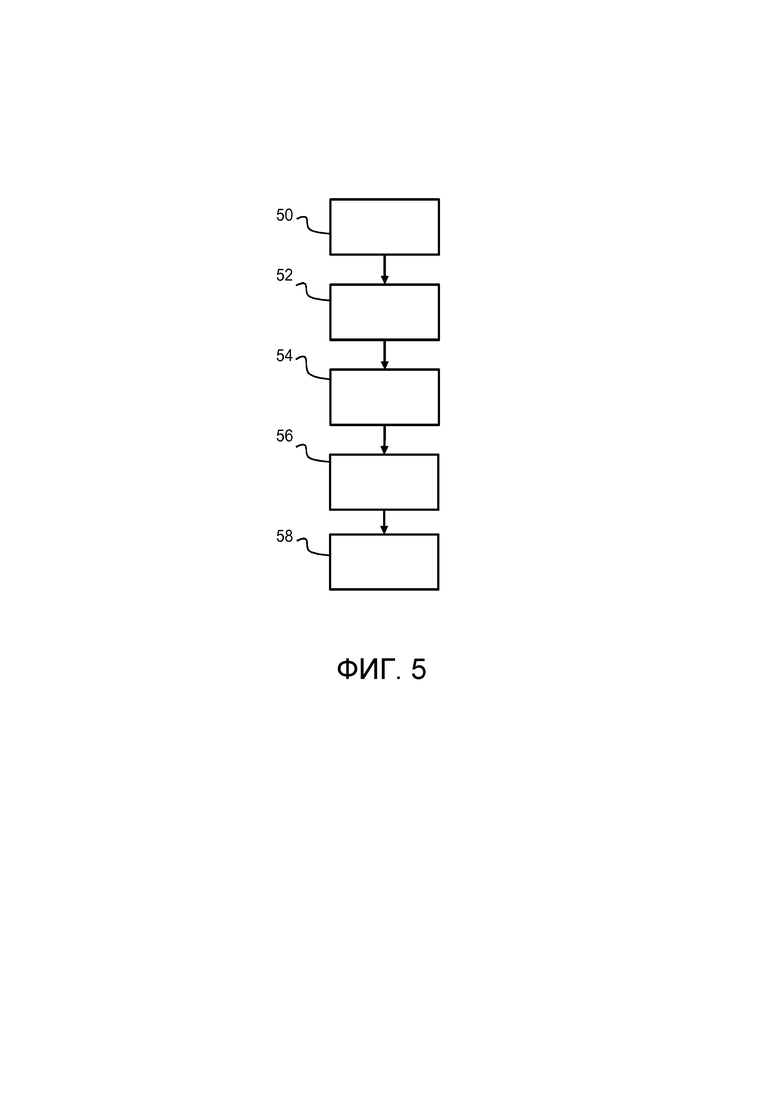
Фиг. 5 изображает способ управления блоком приготовления пищи.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В соответствии с изобретением предлагается система для приготовления пищи, которая объединяет блок приготовления пищи и систему обнаружения твердых частиц. Посредством определения соотношения между концентрациями частиц по меньшей мере в двух диапазонах размеров можно идентифицировать конкретные частицы и в этом случае можно управлять блоком приготовления пищи для уменьшения или устранения образования этих частиц. Сами частицы могут быть вредными и/или могут свидетельствовать об образовании вредных веществ в приготовленной пище.
На Фиг.1 показана система 1 для приготовления пищи, содержащая блок 2 приготовления пищи и систему 3 обнаружения частиц для обнаружения частиц. Система 3 обнаружения частиц содержит блок 4 измерения частиц для определения концентраций частиц по меньшей мере в двух диапазонах размеров и контроллер 5 для обработки данных о концентрациях частиц.
Блок 2 приготовления пищи содержит камеру или зону 6 для пищевых продуктов, нагреватель 7 и контроллер 8. Контроллер обеспечивает возможность установки температуры приготовления пищи, как правило, и вручную, и электронным образом в автоматическом режиме.
Контроллер 5 определяет одно или более соотношений между концентрациями частиц по меньшей мере в двух диапазонах размеров. Это используется для идентификации определенных частиц. В ответ обеспечивается выходной сигнал для управления блоком 2 приготовления пищи либо для прекращения приготовления пищи, либо для изменения настройки температуры блока приготовления пищи.
Система 3 обнаружения частиц может являться частью блока приготовления пищи. Однако в показанном примере она является частью воздухоочистителя 9. Это означает, что обнаружение частиц может быть использовано также для управления работой воздухоочистителя. В этом случае воздухоочиститель и блок приготовления пищи предпочтительно находятся в одном и том же общем месте (например, на кухне).
Блок 2 приготовления пищи, например, содержит мультипечку или тостер. Оба эти устройства способны сжигать пищу и, следовательно, высвобождать нежелательные твердые частицы.
Для получения данных о концентрациях частиц может быть использована система оптического измерения.
На Фиг. 2 изображен пример датчика частиц, который может быть использован. От входного отверстия 11 канала 13 потока к выходному отверстию 12 канала 13 потока проходит поток 10 текучей среды (газа). Канал 13 потока образован трубкой, которая имеет длину от входного отверстия 11 до выходного отверстия 12. Частицы проходят через область, облучаемую источником 14 света для обеспечения света, который рассеивается частицами с образованием рассеянного света. Свет от источника 14 света не проходит напрямую к детектору, когда частицы отсутствуют, и с этой целью детектор расположен под углом к пути источника света, как схематично показано на Фиг. 2. Рассеянный свет обнаруживают при помощи детектора 16 света. Падающий свет от источника 14 света фокусируют при помощи коллиматора 14' в небольшую зону 15 измерения, например, в которой в любой момент присутствует только одна частица, для осуществления обнаружения отдельных частиц.
Таким образом, датчик обеспечивает подсчет частиц, а также определение размера отдельных частиц.
Для создания потока через датчик частиц используют устройство 22 управления потоком, схематически показанное на Фиг. 2. Оно может содержать вентилятор или нагреватель для создания конвективного теплового потока. В системе, использующей нагрев, возникающая подъемная сила обеспечивает прохождение потока воздуха к верхней части детектора, унося частицы через канал потока. В таком случае канал потока может быть направлен вертикально вверх.
Источник света находится на одной стороне канала 13 потока, а детектор 16 света находится на противоположной стороне. В альтернативной конструкции может быть использовано отражение света. Источником света может быть лазерный диод (например, импульсный лазер) или инфракрасный светодиод.
Частицы облучают в зоне 15 измерения на прозрачных участках трубки, которая определяет канал 13 потока, что обеспечивает возможность прохождения света через трубку. Трубка может быть частью корпуса, который размещен на печатной плате с электроникой для преобразования сигнала от частиц в единичный импульс счета. Рассеяние падающего света непосредственно на фотодиодный детектор света, которое будет давать фоновый сигнал, сведено к минимуму.
Детектор 16 света содержит фотодиодный датчик 18 и фокусирующую линзу 20, на которой обнаруживают рассеянный свет, в результате чего генерируют сигнал детектора света. Контроллер 24 управляет работой устройства управления потоком и источника света.
Для определения размера частиц сигнал детектора может быть усилен и сравнен с пороговым напряжением. Пороговое значение реализовано как пороговое напряжение, подаваемое на устройство сравнения, которое управляет чувствительностью сенсорной системы к размеру частиц.
При превышении определенного размера частиц высота пика достаточна для прохождения порогового значения. Таким образом, пороговое значение реализует функцию полосовой фильтрации. Импульс считают для осуществления подсчета частиц, а длину импульса измеряют для определения размера частиц. Для большого набора импульсов обнаружения, например, используют критерий времени пребывания слабого импульса (low-pulse occupancy, LPO%).
Таким образом, есть два основных выходных сигнала. Один из них является простым подсчетом частиц, который представляет собой подсчет количества пиков обнаружения, которые превышают установленное пороговое значение. Другой представляет собой амплитуду аналогового сигнала, пропорциональную размеру частиц.
Для обнаружения потока частиц датчик может быть использован для выполнения сортировки по размеру. Пороговое напряжение, подаваемое на устройство сравнения, устанавливает граничный предел для аналогового сигнала. Например, пороговое значение 1 В означает, что все сигналы выше 1 В будут зарегистрированы как сигналы обнаружения, таким образом, соответствующие всем размерам частиц, которые генерируют аналоговый сигнал выше 1 В. Точно так же пороговое значение 2 В поднимает границу, позволяющую только частицам большего размера генерировать выходной сигнал.
Для простоты пороговое напряжение 1 В может соответствовать сигналам, генерируемым для частиц диаметром 1 мкм и более, тогда как пороговое значение 2 В может соответствовать частицам диаметром 2 мкм и более. Для получения информации о количестве частиц для определенного диапазона размеров частиц (также известного как "размерная категория"), для диапазона размеров частиц от 1 мкм до 2 мкм, вычитают количество сигналов, генерируемых при этих пороговых напряжениях.
Таким образом, датчик оптического рассеяния может быть использован для измерения размеров отдельных частиц аналоговым способом или для записи размеров частиц в размерные категории более цифровым способом. В этом случае могут быть получены уровни концентрации в этих категориях.
Дополнительные детали конструкции и работы оптических датчиков частиц этого типа хорошо известны специалистам в данной области техники.
Изобретение основано на использовании соотношений концентраций частиц для идентификации типов частиц и соответствующего управления процессом приготовления пищи. В частности, соотношение концентрации мелких частиц к концентрации крупных частиц дает информацию о типе присутствующих частиц.
Во время обычного приготовления пищи, такого как жарка или поджаривание, выделяются частицы, но когда пища начинает подгорать, выделяется непропорционально большое количество мелких частиц. Просто получение абсолютного количества частиц бесполезно, поскольку оно зависит от количества пищи, расстояния между измерительным устройством и плитой, уровня вентиляции помещения и т.п.
На Фиг. 3 изображена записанная информация о концентрации частиц PM 2,5 во время процесса жарки в мультипечке. По оси Y отложена концентрация частиц, по оси X отложено время (произвольные единицы). Уровни PM 2,5 медленно повышаются при включении мультипечки и при жарке продуктов при заданной температуре. Например, в момент A времени температура мультипечки составляет 170 градусов Цельсия, и в ней отсутствует пища. Выбросы PM 2,5 резко возрастают при повышении температуры (до значений, при которых пища может пригореть). Например, в момент В времени температура мультипечки составляет 200 градусов Цельсия. Концентрация повысилась, хотя пища отсутствует.
В момент С времени температура мультипечки составляет 170 градусов Цельсия, и в ней находится пища. В момент D времени температура мультипечки составляет 200 градусов Цельсия, и в ней находится пища.
В момент Е времени приготовление пищи завершено, и мультипечка выключена. Уровни концентрации непрерывно снижаются до момента F времени.
Однако сами уровни концентрации не могут быть использованы в качестве индикатора уровней опасных твердых частиц, поскольку они зависят от количества пищи, расстояния между измерительным устройством и мультипечкой, уровня вентиляции помещения и т.п. Кроме того, в конце процесса (в момент F времени) уровни PM 2,5 низкие. Однако большое количество мелких опасных частиц все еще присутствует, но они не отображаются в значениях PM 2,5 из-за их малого веса.
Во время пригорания пищи выделяется больше мелких частиц, чем крупных. Таким образом, когда количество частиц размером 0,5 мкм разделено на количество частиц размером 1 мкм, пик наблюдается только тогда, когда пища становится слишком горячей. Этот пик является соотношением, поэтому он не зависит от количества пищи, расстояния между измерительным устройством и мультипечкой, уровня вентиляции помещения и т.п.
На Фиг. 4 изображен график соотношения концентраций (между частицами размером 0,5 мкм и частицами размером 1,0 мкм). На нем показаны те же моменты времени, что и на Фиг. 3.
Соотношение концентраций обеспечивает гораздо лучший индикатор наличия опасных частиц. В ответ мультипечка может быть автоматически выключена или установлена на более низкую температуру, когда соотношение частиц увеличивается выше определенного значения (например, 15 в примере на Фиг. 4).
Более того, соотношение концентраций все еще остается высоким в конце процесса (момент F времени), что указывает на сохраняющиеся опасные уровни мелких частиц сгорания, тогда как классические значения PM 2,5 являются низкими.
Кроме того, могут быть использованы другие соотношения, например 0,3 мкм/1 мкм или 0,3 мкм/2,5 мкм, или 0,5 мкм/2,5 мкм.
Более совершенные оптические датчики (такие как датчики самосмешивающейся интерферометрии) могут предоставлять информацию о меньших размерах (например, 0,1 мкм). Чем больше диапазон чувствительности датчика частиц, тем выше способность обнаруживать определенные типы частиц.
На Фиг. 5 изображен способ управления блоком приготовления пищи, включающий:
на этапе 50, управление работой блока приготовления пищи для начала приготовления;
на этапе 52, определение концентраций частиц по меньшей мере в двух диапазонах размеров;
на этапе 54, определение одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и
на этапе 56, управление, в ответ на определенные одно или более соотношений, блоком приготовления пищи.
Кроме того, способ может включать, на этапе 58, управление работой воздухоочистителя.
Изобретение представляет интерес для обнаружения пищи, которая подгорела в блоке приготовления пищи, таком как тостер или мультипечка. Конечно, оно может быть применено и к другим блокам приготовления пищи, таким как духовки.
Как описано выше, в вариантах осуществления использован контроллер 5. Контроллер может быть реализован множеством способов, при помощи программного обеспечения и/или аппаратных средств, для выполнения различных требуемых функций. Контроллер может использовать микропроцессор, запрограммированный с использованием программного обеспечения (например, микрокода) для выполнения требуемых функций. Однако контроллер может быть реализован с использованием или без использования микропроцессора, а также может быть реализован как комбинация специализированных аппаратных средств для выполнения некоторых функций и как процессор (например, один или более запрограммированных микропроцессоров и связанные с ними схемы) для выполнения других функций.
Примеры компонентов контроллера, которые могут быть использованы в различных вариантах осуществления настоящего изобретения, включают в себя, помимо прочего, традиционные микропроцессоры, специализированные интегральные схемы (application specific integrated circuits, ASIC) и программируемые пользователем матрицы логических элементов (field-programmable gate arrays, FPGA).
В различных вариантах осуществления процессор или контроллер могут быть связаны с одним или более носителями данных, такими как энергозависимая и энергонезависимая компьютерная память, например ОЗУ, ППЗУ, СППЗУ и ЭСППЗУ. Носители данных могут быть закодированы одной или более программами, которые при выполнении на одном или более процессорах и/или контроллерах выполняют требуемые функции. Различные носители данных могут быть закреплены в процессоре или контроллере или могут быть транспортируемыми, так что одна или более сохраненных на них программ могут быть загружены в процессор или контроллер.
Приведенный выше пример основан на определении соотношения между различными концентрациями при разных размерах. В общем и целом, это дает приблизительный показатель распределения частиц. Менее приблизительный показатель может быть получен посредством контроля большего количества соотношений. Однако использование набора из одного или более соотношений устраняет необходимость в полном анализе распределения концентраций. Тем не менее, может быть проанализировано любое количество соотношений, таким образом, анализ может приближаться к информации о полном распределении концентраций, которая может быть интерпретирована посредством нахождения функции наилучшего соответствия или при помощи справочной таблицы.
Диапазоны размеров, для которых получены уровни концентрации, могут иметь различную ширину. Например, диапазон размеров может быть для наименьшего размера частиц, к которому датчик чувствителен, до порогового значения (например, от 0,1 мкм до 0,5 мкм), или он может быть для узкого диапазона размеров около интересующего размера, такого как X мкм ± 10% или X мкм ± 10%, например 0,5 мкм ± 0,05 мкм или 1 мкм ± 0,1 мкм. Можно видеть, что различные соотношения могут обеспечивать приблизительный показатель функции распределения частиц, который достаточен для обнаружения пригорания.
Другие вариации раскрытых вариантов осуществления изобретения могут быть поняты и реализованы специалистами в данной области техники при осуществлении настоящего изобретения на практике на основании изучения чертежей, текста описания и прилагаемой формулы изобретения. В пунктах формулы изобретения слово "содержащий" не исключает другие элементы или этапы, а грамматические средства выражения единственного числа не исключают множественное число. Сам факт того, что определенные меры изложены в отличающихся друг от друга зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой. Никакие ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАБОТКА ПЫЛИ | 2016 |
|
RU2655225C1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ | 2020 |
|
RU2824818C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ | 2018 |
|
RU2743688C1 |
| ДАТЧИК АЭРОЗОЛЯ И СПОСОБ ВОСПРИЯТИЯ | 2015 |
|
RU2672773C2 |
| БЛОКИРОВКА ПЛИТЫ ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ | 2005 |
|
RU2369989C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ | 2019 |
|
RU2796469C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ И СПОСОБ | 2016 |
|
RU2707323C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩЕВОГО ПРОДУКТА | 2019 |
|
RU2801259C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ | 2007 |
|
RU2427107C2 |
| ВОЗДУХООЧИСТИТЕЛЬ И АРОМАТИЗАЦИЯ АТМОСФЕРЫ | 2017 |
|
RU2679418C1 |

Система для приготовления пищи объединяет блок приготовления пищи и систему обнаружения частиц. Система для приготовления пищи содержит: блок приготовления пищи и систему обнаружения частиц для обнаружения частиц, содержащую: блок измерения частиц для определения концентраций частиц по меньшей мере в двух диапазонах размеров и контроллер для обработки данных о концентрации частиц, причем контроллер выполнен с возможностью: определения одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и обеспечения, в ответ на определенные одно или более соотношений, выходного сигнала для управления блоком приготовления пищи. Посредством определения соотношения между концентрациями частиц по меньшей мере в двух диапазонах размеров можно идентифицировать конкретные частицы и в этом случае можно управлять блоком приготовления пищи для уменьшения или устранения образования указанных частиц. 3 н. и 12 з.п. ф-лы, 5 ил.
1. Система (1) для приготовления пищи, содержащая:
- блок (2) приготовления пищи и
- систему (3) обнаружения частиц для обнаружения частиц, содержащую:
блок (4) измерения частиц для определения концентраций частиц по меньшей мере в двух диапазонах размеров и контроллер (5) для обработки данных о концентрации частиц, причем контроллер выполнен с возможностью:
определения одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и обеспечения, в ответ на определенные одно или более соотношений, выходного сигнала для управления блоком (2) приготовления пищи.
2. Система по п. 1, в которой контроллер (5) выполнен с возможностью управления блоком приготовления пищи для прекращения приготовления пищи или изменения настройки температуры блока приготовления пищи.
3. Система по п. 1 или 2, в которой контроллер (5) дополнительно выполнен с возможностью обеспечения, в ответ на определенные одно или более соотношений, выходного сигнала для управления работой воздухоочистителя.
4. Система по п. 3, в которой система обнаружения частиц содержит часть воздухоочистителя.
5. Система по любому из пп. 1-4, в которой первый пороговый размер составляет 0,3 мкм или 0,5 мкм и/или второй пороговый размер составляет 1,0 мкм или 2,5 мкм.
6. Система по любому из пп. 1-5, в которой блок (2) приготовления пищи содержит мультипечку или тостер.
7. Система по любому из пп. 1-6, в которой система обнаружения частиц содержит: оптический датчик (16), выполненный с возможностью генеририрования сигнала датчика, причем сигнал датчика или анализ сигнала датчика является управляемым посредством применения настройки порогового значения, причем настройка порогового значения задает диапазон определения размера частиц, захватываемый сигналом датчика; и контроллер (24), причем контроллер (24) выполнен с возможностью применения по меньшей мере первой и второй разных настроек порогового значения для определения концентраций частиц в указанных по меньшей мере двух диапазонах размеров и для приема соответствующих первых и вторых показаний оптического датчика.
8. Способ управления блоком приготовления пищи, включающий:
(50) управление работой блока приготовления пищи для начала приготовления;
(52) определение концентраций частиц по меньшей мере в двух диапазонах размеров;
(54) обработку данных о концентрации частиц, причем обработка включает определение одного или более соотношений между концентрациями частиц в указанных по меньшей мере двух диапазонах размеров и
(56) обеспечение, в ответ на определенные одно или более соотношений, выходного сигнала для управления блоком приготовления пищи.
9. Способ по п. 8, в котором (56) управление блоком приготовления пищи включает прекращение приготовления пищи или изменение настройки температуры блока приготовления пищи.
10. Способ по п. 8 или 9, включающий (58) управление, в ответ на определенные одно или более соотношений, работой воздухоочистителя.
11. Способ по п. 10, в котором система обнаружения частиц содержит часть воздухоочистителя.
12. Способ по любому из пп. 8-11, в котором первый пороговый размер составляет 0,3 мкм или 0,5 мкм и/или второй пороговый размер составляет 1,0 мкм или 2,5 мкм.
13. Способ по любому из пп. 8-12, в котором приготовление пищи включает жарку в мультипечке или поджаривание в тостере.
14. Способ по любому из пп. 8-13, в котором определение концентраций частиц включает:
применение по меньшей мере первой и второй отличных друг от друга настроек порогового значения при генерации сигнала оптического датчика, причем настройка порогового значения задает диапазон определения размера частиц, захватываемый сигналом оптического датчика, и, таким образом, обеспечивает определение концентраций частиц в указанных по меньшей мере двух диапазонах размеров.
15. Компьютерочитаемый носитель, содержащий средства компьютерного кода, которые при выполнении на компьютере выполнены с возможностью инициировать выполнение системой по любому из пп. 1-7 операций способа по любому из пп. 8-14.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ЛЕЧЕНИЯ ЖЕНЩИН С ВОСПАЛЕНИЕМ ПРИДАТКОВ МАТКИ | 1992 |
|
RU2063216C1 |
| ДАТЧИК АЭРОЗОЛЯ И СПОСОБ ВОСПРИЯТИЯ | 2015 |
|
RU2672773C2 |
| US 2018217042 A1, 02.08.2018 | |||
| EA 201491880 A1, 31.03.2015. | |||

