Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной рабочей машине, в частности к уборочной машине, согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Сельскохозяйственные рабочие машины, к которым относятся, в частности, самоходные уборочные машины, как, например, зерноуборочный комбайн и кормоуборочный комбайн, предназначенные для выполнения или поддержки выполнения сельскохозяйственной работы, обычно содержат различные рабочие органы. Примерами рабочих органов зерноуборочного комбайна являются, в частности, жатка, молотильный аппарат, установленный после жатки, а также устройства для разделения и очистки, установленные после молотильного аппарата. Жатка обычно представляет собой передний рабочий орган, т.е. рабочий орган, который расположен в передней части зерноуборочного комбайна в направлении движения. Соответствующие передние рабочие органы в виде жатки известны также в кормоуборочных комбайнах. Только в качестве примера можно назвать, так называемую, кукурузную рядную жатку.
Широко известны также применяемые в сельскохозяйственных рабочих машинах системы автоматического копирования рельефа грунта, задачей которых в общем случае является, проводить передний рабочий орган через растения на точно определенном расстоянии до грунта. Такая система автоматического копирования рельефа грунта описана, например, в ЕР 1374661 В1. Известная система автоматического копирования рельефа грунта содержит устройство зондирования рельефа грунта, которое контактным способом, например, при помощи копирующей скобы, и/или бесконтактным способом, например, при помощи оптической системы, зондирует рельеф грунта по меньшей мере в двух местах, расположенных на расстоянии друг от друга, в направлении движения сельскохозяйственной рабочей машины. В результате такого зондирования можно обнаружить разность высот в направлении движения и, таким образом, уклон грунта. Исходя из определенной разности высот, система автоматического копирования рельефа грунта устанавливает расстояние от переднего рабочего органа до грунта. Наряду с таким регулированием положения переднего рабочего органа по высоте можно также регулировать поперечное положение, т.е. наклон переднего рабочего органа поперек направления движения, для чего по всей рабочей ширине переднего рабочего органа предусмотрено несколько указанных устройств зондирования рельефа грунта. Таким образом, должна поддерживаться одинаковая высота среза убираемой культуры даже при изменяющемся рельефе грунта.
При этом настройка параметров (коэффициентов усиления, постоянной времени фильтров и т.п.), связанных с чувствительностью регулирования положения по высоте и поперечного положения, всегда представляет собой компромисс. С одной стороны, эти параметры должны быть установлены таким образом, чтобы положение по высоте и поперечное положение можно было достаточно быстро адаптировать к рельефу грунта. С другой стороны, чувствительность регулирования системы автоматического копирования рельефа грунта или ее быстродействие не должны быть настолько высокими, чтобы такие небольшие неровности грунта, как колеи транспортных средств, повреждения, создаваемые дикими животными, и т.п., не вызывали слишком сильного перемещения переднего рабочего органа. Так, например, при движении поперек или по диагонали относительно направления расположения растений или колей транспортного средства, которые встречаются, в частности, на краю вспаханного поля, система может иногда так сильно реагировать на неровности, что в кабине возникают ощутимые удары, или передний рабочий орган начинает колебаться. Такие удары ухудшают комфортность условий работы водителя, а колебания переднего рабочего органа могут приводить к ухудшению качества скашивания.
Раскрытие сущности изобретения
Задачей изобретения является выполнить и усовершенствовать сельскохозяйственную рабочую машину таким образом, чтобы обеспечить повышение комфортности ее эксплуатации при прохождении через растения.
Указанная задача решена сельскохозяйственной рабочей машиной согласно ограничительной части пункта 1 с признаками отличительной части пункта 1 формулы изобретения.
Важной является принципиальная идея, в соответствии с которой при прохождении через растения распознаются изменения высоты растений перед сельскохозяйственной рабочей машиной, и в зависимости от того, является ли такое изменение большим, малым или вообще отсутствующим, устанавливается соответствующая чувствительность регулирования системы автоматического копирования рельефа грунта. Для этого система автоматического копирования рельефа грунта может производить измерения высоты растений в нескольких местах, находящихся на расстоянии друг от друга в направлении движения перед сельскохозяйственной рабочей машиной, и на основании полученных результатов измерений определять, имеет ли рельеф при продолжении движения наклон в определенном направлении, например, имеет ли следующий участок пути спуск вследствие глубокой низины или подъем вследствие высокого холма, или рельеф в направлении движения является, по существу, плоским. Если обнаружены сравнительно большие изменения высоты растений, то система автоматического копирования рельефа грунта может сделать заключение о том, что в направлении движения перед сельскохозяйственной рабочей машиной имеет место изменение уклона местности. И, напротив, если обнаружены малые изменения высоты растений или изменения высоты культуры не обнаружены, может быть сделано заключение о фактически плоском рельефе.
Если система автоматического копирования рельефа грунта на основании обнаруженного изменения высоты растений делает заключение о предстоящем изменении уклона местности, чувствительность регулирования системы автоматического копирования рельефа грунта повышается, поэтому при достижении участка, на котором уклон местности изменяется, при неизбежно появляющейся затем разности высот грунта осуществляется максимально быстрая адаптация расстояния от переднего рабочего органа до грунта. И напротив, если система автоматического копирования рельефа грунта обнаруживает отсутствие изменения или лишь незначительное изменение высоты растений и, соответственно, делает заключение о плоском рельефе без предстоящего изменения уклона, чувствительность регулирования системы автоматического копирования рельефа грунта устанавливается сравнительно низкой, поэтому система автоматического копирования рельефа грунта сравнительно слабо реагирует на появление разности высот грунта, связанных с мелкими неровностями грунта. Таким образом, можно избежать сильной реакции и, следовательно, ударов или колебаний переднего рабочего органа из-за мелких неровностей грунта.
Согласно изобретению предусмотрено, чтобы система автоматического копирования рельефа грунта заранее учитывала обнаруженное изменение высоты растений и, исходя из этого обнаруженного изменения высоты растений, осуществлялось соответствующая адаптация чувствительности регулирования системы автоматического копирования рельефа грунта. Адаптация чувствительности заключается, в частности, в изменении параметров регулирования, которые оказывают влияние на чувствительность. Исключительно в качестве примера можно назвать такие параметры, как коэффициенты усиления, постоянные времени фильтров и т.п.Таким образом, система автоматического копирования рельефа грунта может отфильтровывать мелкие неровности грунта и только в случае сравнительно больших изменений уклона местности осуществлять необходимую быструю адаптацию расстояния от переднего рабочего органа до грунта.
В варианте осуществления согласно пункту 2 формулы изобретения обнаруженное изменение высоты растений сравнивается с предварительно установленным и, в частности, с сохраненным в запоминающем устройстве заданным значением изменения высоты растений. Обнаруженное изменение высоты растений может также представлять собой усредненное изменение высоты растений, которое определяется на заданном участке (пункт 3 формулы изобретения). Таким образом, сравнительно большие изменения высоты растений, а именно те, которые превосходят заданное значение, можно отличать от сравнительно малых изменений высоты растений. Большое изменение высоты растений указывает на изменение уклона местности на следующем участке движения, поэтому при достижении места или момента времени изменения уклона должна быть установлена более высокая чувствительность регулирования (пункт 4 формулы изобретения).
В варианте осуществления согласно пункту 5 формулы изобретения чувствительность повышается только для заданного участка и/или интервала времени, т.е. только временно, а затем снова уменьшается. Повышенная чувствительность устанавливается, в частности, только для участка и/или интервала времени, которые связаны с прохождением, в частности, с полным прохождением сельскохозяйственной рабочей машиной в условиях изменения уклона местности. На этом участке пути и/или в этом интервале времени необходимо обеспечивать максимально быструю адаптацию расстояния от переднего рабочего органа до грунта. Сразу после преодоления участка с изменением уклона местности чувствительность системы автоматического копирования рельефа грунта должна быть снова уменьшена, чтобы обеспечить слабую реакцию системы автоматического копирования рельефа грунта, при которой мелкие неровности грунта не могут вызывать сильных перемещений переднего рабочего органа.
Пункты 6-8 формулы изобретения раскрывают различные возможности определения участков, на которых чувствительность регулирования системы автоматического копирования рельефа грунта должна оставаться повышенной.
В варианте осуществления согласно пункту формулы изобретения 9 чувствительность регулирования системы автоматического копирования рельефа грунта в простейшем случае может быть установлена между двумя значениями, а именно между первым, сравнительно низким значением и другим значением, более высоким относительно первого. Однако, в принципе, могут быть также предусмотрены промежуточные значения, которые могут быть установлены для чувствительности на основании обнаруженного изменения высоты растений.
В пунктах 10-12 формулы изобретения определено детектирующее устройство сельскохозяйственной рабочей машины, которое может определять высоту растений в направлении движения перед сельскохозяйственной рабочей машиной. При помощи детектирующего устройства можно определять высоту растений, т.е. абсолютную высоту убираемой культуры от грунта до верхушек растений или высотный профиль растений. В последнем случае определяется не высота растений, а только разность высот между вершинами растений, которая образует высотный профиль растений.
В другом варианте осуществления согласно пункту 13 формулы изобретения система автоматического копирования рельефа грунта содержит устройство зондирования рельефа грунта, которое зондирует грунт перед сельскохозяйственной рабочей машиной и/или под передним рабочим органом и в результате этого может определять разность высот грунта. В зависимости от чувствительности, установленной для системы автоматического копирования рельефа грунта в момент определения разности высот грунта, система автоматического копирования рельефа грунта быстро изменяет расстояние от переднего рабочего органа до грунта в случае большого изменения уклона местности или слабо реагирует, если имеют место только мелкие неровности грунта.
В варианте осуществления согласно пункту формулы изобретения 14 система автоматического копирования рельефа грунта с соответствующей установленной чувствительностью может регулировать положение по высоте переднего рабочего органа, т.е. среднее по всей рабочей ширине переднего рабочего органа расстояние до грунта, и/или поперечное положение, т.е. наклон относительно грунта переднего рабочего органа поперек направления движения.
Краткое описание чертежей
Ниже приведено более подробное описание изобретения со ссылками на чертежи вариантов осуществления, на которых показаны:
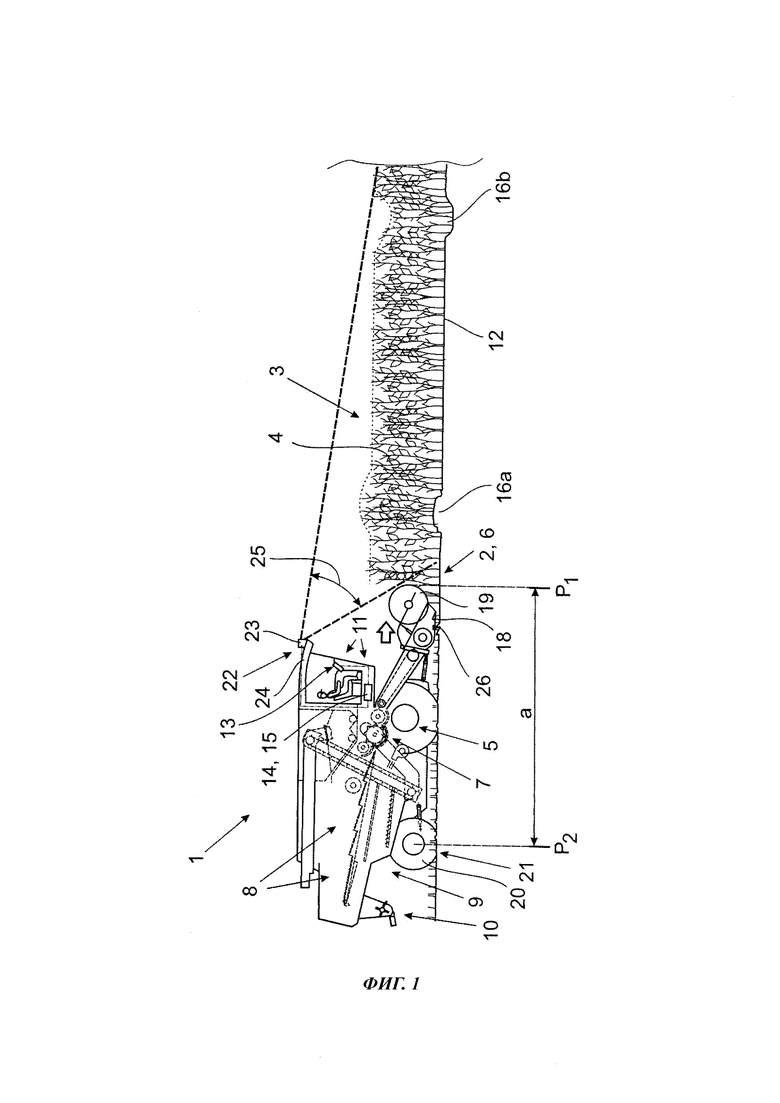
фиг. 1 схематический вид предлагаемой сельскохозяйственной рабочей машины в виде зерноуборочного комбайна при прохождении плоского участка,
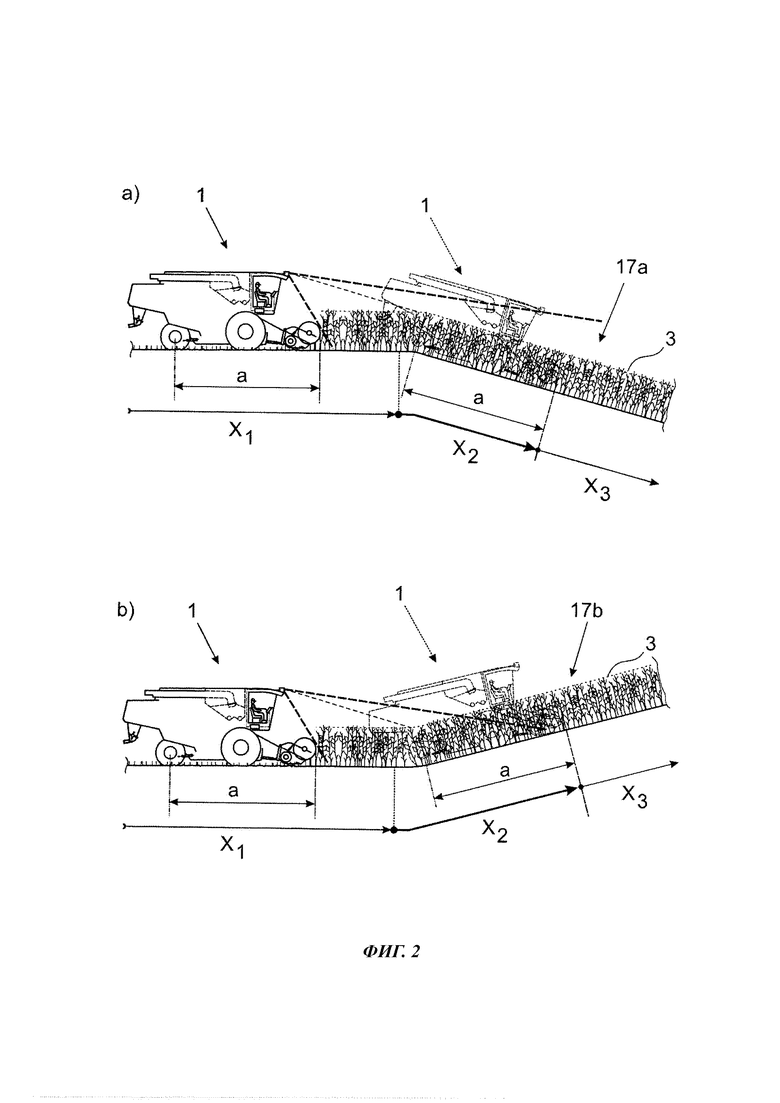
фиг. 2а сельскохозяйственная рабочая машина с фиг. 1 при прохождении участка с понижающимся рельефом, и
фиг. 2b сельскохозяйственная рабочая машина с фиг. 1 при прохождении участка с повышающимся рельефом.
Осуществление изобретения
Предлагаемое решение может быть использовано в широкой области самоходных сельскохозяйственных рабочих машин, в частности уборочных машин. К этой области относятся зерноуборочные комбайны, кормоуборочные комбайны, тягачи, в частности тракторы, и т.п.В представленном и, соответственно, предпочтительном варианте осуществления сельскохозяйственная рабочая машина 1 представляет собой зерноуборочный комбайн, обычно оснащенный передним рабочим органом 2, который служит для выполнения или для поддержки выполнения сельскохозяйственной работы с растениями 3. Все пояснения, касающиеся зерноуборочного комбайна, действительны также для всех других типов сельскохозяйственных рабочих машин, соответственно. Сельскохозяйственная рабочая машина 1 служит для выполнения сельскохозяйственного рабочего процесса, например, уборки культуры 4, состоящей из растений 3. Если сельскохозяйственная рабочая машина 1, как в представленном варианте осуществления изобретения, является зерноуборочным комбайном, то во время выполнения сельскохозяйственного рабочего процесса в рабочей машине 1 происходит процесс переработки убираемой культуры, который включает в себя процессы обмолачивания, сепарации, очистки и распределения.
Предлагаемая сельскохозяйственная рабочая машина 1 оснащена несколькими рабочими органами 5-10. Сельскохозяйственная рабочая машина 1 в виде зерноуборочного комбайна предназначена для выполнения указанного процесса переработки убираемой культуры и предпочтительно содержит в качестве рабочих органов привод 5 ходовой части, жатку 6, молотильный аппарат 7, сепарирующее устройство 8, очистительное устройство 9 и распределительное устройство 10. Передний рабочий орган 2 в данном случае и предпочтительно представляет собой жатку 6.
Сельскохозяйственная рабочая машина 1 оснащена также системой 11 автоматического копирования рельефа грунта, предназначенной для регулирования расстояния от переднего рабочего органа 2 до грунта 12 при прохождении через растения 3. Система 11 автоматического копирования рельефа грунта может представлять собой компонент системы 13 помощи водителю, которая служит для управления рабочими органами 5-10. Система 11 автоматического копирования рельефа грунта и при необходимости также система 13 помощи водителю в данном случае и предпочтительно содержат запоминающее устройство 14 для сохранения данных, а также вычислительное устройство 15 для обработки данных, сохраненных в запоминающем устройстве 14. Указанные данные, как поясняется далее, представляют собой, в частности, результаты измерения высоты или профиля растений и/или результаты измерения рельефа грунта.
Принцип функционирования системы 11 автоматического копирования рельефа грунта достаточно известен и в целом раскрыт во вводной части описания. Пример конструкции такой системы 11 автоматического копирования рельефа грунта показан в патенте ЕР 1374661 В1, который принадлежит заявителю, и содержание которого, таким образом, является предметом настоящей заявки. В принципе, система 11 автоматического копирования рельефа грунта позволяет осуществлять зондирование рельефа грунта 12 в направлении движения перед сельскохозяйственной рабочей машиной 1 и/или вертикально под передним рабочим органом 2, таким образом, можно автоматически определять изменения рельефа грунта. Такие изменения представляют собой, с одной стороны, мелкие неровности грунта, как, например, мелкие возвышения 16а или углубления 16b в остальном, по существу, плоском рельефе (фиг. 1), создаваемые, например, колеями транспортных средств или дикими животными, а, с другой стороны, крупные изменения рельефа местности (топографические изменения), как, например, спуск 17а (фиг. 2а) или подъем 17b (фиг. 2b) рельефа.
Согласно изобретению предусмотрено, чтобы система 11 автоматического копирования рельефа грунта заранее учитывала обнаруженное изменение высоты растений 3, и на основании указанного обнаруженного изменения высоты растений осуществлялась адаптация чувствительности регулирования системы 11 автоматического копирования рельефа грунта. Таким образом, система 11 автоматического копирования рельефа грунта обнаруживает имеющиеся изменения высоты растений 3 и на основании этих изменений может определять имеет ли дальнейший рельеф в направлении движения перед сельскохозяйственной рабочей машиной 1 подъем или спуск или остается плоским. Только в том случае, если обнаруженное изменение высоты растений указывает на предстоящее изменение уклона местности, чувствительность системы автоматического копирования рельефа грунта повышается на том месте или в тот момент, когда уклон местности начнет изменяться, чтобы максимально быстро адаптировать передний рабочий орган 2 к изменению рельефа грунта. И напротив, если изменение высоты растений не обнаружено или обнаружено изменение высоты растений только на очень малом протяжении, чувствительность регулирования системы 11 автоматического копирования рельефа грунта устанавливается на сравнительно низком значении или остается на таком сравнительно низким значении, которое, в частности, задается по умолчанию. Если установлена такая сравнительно низкая чувствительность, то система 11 автоматического копирования рельефа грунта сравнительно слабо реагирует или вообще не реагирует на изменения высоты рельефа грунта, поскольку в этом случае изменения рельефа грунта вызываются только мелкими неровностями 16а, 16b грунта.
Поскольку в предлагаемой сельскохозяйственной рабочей машине 1 система 11 автоматического копирования рельефа грунта только при изменении уклона местности обеспечивает быстрое регулирование расстояния от переднего рабочего органа 2 до грунта 12 вследствие повышенной чувствительности, а в остальных случаях, а именно, при наличии только мелких неровностей 16а, 16b грунта, реагирует довольно слабо, можно избежать нежелательных ударов и колебаний переднего рабочего органа 2. Благодаря этому, можно повысить удобство езды и улучшить качество скашивания.
Обнаруженное изменение высоты растений в данном случае и предпочтительно сравнивается с предварительно установленным и сохраненным в запоминающем устройстве 14 заданным значением изменения высоты растений. При этом обнаруженное изменение высоты растений может представлять собой также среднее изменение высоты растений, которое определяется из множества измерений, проведенных на заданном участке в направлении движения. Отдельные результаты измерений могут быть также сохранены в запоминающем устройстве 14. Так, например, если измерение производится в направлении движения по меньшей мере в трех местах, расположенных на расстоянии друг от друга, и посредине не обнаружено изменения высоты растений, можно сделать заключение о том, что отдельные увеличенные результаты измерений указывают только на локальные мелкие неровности 16а, 16b грунта, в то время как остальной участок является плоским. В этом случае чувствительность регулирования системы 11 автоматического копирования рельефа грунта может оставаться на значении, установленном сравнительно низким. И напротив, если в результате многократных последовательных измерений для изменения высоты растений получено положительное или отрицательное значение, что указывает также на соответствующее высокое положительное или отрицательное среднее значение изменения высоты растений, то это означает подъем или спуск рельефа местности и требует повышения чувствительности регулирования системы 11 автоматического копирования рельефа грунта, в данном случае и предпочтительно - для заданного участка и/или интервала времени. Затем чувствительность может быть снова уменьшена, в частности, до предшествующего значения. На фиг. 2а и 2b в качестве примера показаны первый участок пути со сравнительно низкой установленной чувствительностью регулирования, обозначенной второй, непосредственно следующий за ним участок пути со сравнительно высокой установленной чувствительностью регулирования, обозначенной Х2, и третий, непосредственно следующий за ним участок пути снова со сравнительно низкой установленной чувствительностью регулирования, обозначенной Х3.
Заданный участок, на протяжении которого чувствительность регулирования системы 11 автоматического копирования рельефа грунта должна сохранять повышенное значение, выбирается, в частности, таким образом, чтобы в сельскохозяйственной рабочей машине 1 уже в начале изменения уклона местности или даже незадолго до него было установлено повышенное значение чувствительности регулирования, которое сохраняется до тех пор, пока сельскохозяйственная рабочая машина 1 по меньшей мере большей частью, предпочтительно - полностью, не пройдет то место, где изменяется уклон местности. Сразу после этого или по меньшей мере незадолго до этого чувствительность может быть снова уменьшена.
Как можно видеть на фиг. 2а и b, заданный участок, на протяжении которого сохраняется повышенная чувствительность, соответствует по меньшей мере расстоянию а между реперной точкой на переднем рабочем органе 2 и удаленной от нее в продольном направлении или в направлении движения реперной точкой Р2 на сельскохозяйственной рабочей машине 1.
Реперная точка P1 на переднем рабочем органе 2 в данном случае и предпочтительно представляет собой место на детали 18, 19 переднего рабочего органа 2, проходящей поперек продольного направления, при этом указанное место или указанная деталь 18, 19 при прохождении через растения 3 прежде всего вступают в контакт с убираемой культурой 4. В данном случае и предпочтительно указанное место находится, в частности, на передней кромке режущего органа 18, например, ножевого бруса, или мотовила 19 переднего рабочего органа 2, т.е. в данном случае - жатки 6.
Реперная точка Р2 на сельскохозяйственной рабочей машине 1 в данном случае и предпочтительно представляет собой место на заднем средстве 20 сцепления с грунтом, в данном случае - на заднем колесе ходовой части 21 сельскохозяйственной рабочей машины 1. В частности, это место находится посредине опорной поверхности средства 20 сцепления с грунтом относительно продольного направления или направления движения. Термин „средство сцепления с грунтом" в данном случае следует понимать в широком смысле, включающем наряду с колесом, например, также гусеничную ленту. В принципе, реперная точка Р2 может быть также предусмотрена в другом месте, при этом она предпочтительно расположена на расстоянии от первой реперной точки Р1 в направлении движения. Во всяком случае, предпочтительно, чтобы реперная точка Р2 находилась на детали сельскохозяйственной рабочей машины, которая вступает в контакт с грунтом 12 при прохождении через растения 3.
В данном случае и предпочтительно устанавливать чувствительность регулирования системы 11 автоматического копирования рельефа грунта только между двумя значениями, а именно, между первым, низким значением и вторым, более высоким значением по сравнению с первым. Однако, в принципе, может быть также предусмотрена система автоматического копирования рельефа грунта, в которой между первым, низким значением и вторым, высоким значением могут быть установлены промежуточные значения.
Для обнаружения изменения высоты растений сельскохозяйственная рабочая машина 1 в данном случае и предпочтительно содержит детектирующее устройство 22. Указанное детектирующее устройство 22 в данном случае в качестве примера содержит камеру 23, которая установлена, например, на крыше 24 кабины водителя и ориентирована в направлении движения. Дополнительно или альтернативно камере 23 можно назвать несколько примеров датчиков, в частности, радиолокационный датчик, инфракрасный датчик, лазерный датчик (датчик лидар) и/или ультразвуковой датчик. С их помощью можно определять высоту растений 3 в направлении движения перед сельскохозяйственной рабочей машиной 1. Соответствующая регистрируемая область 25 показана на фиг. 1 и 2 штриховыми линиями. В принципе, может быть предусмотрено также несколько указанных детектирующих устройств 22, распределенных, в частности, по всей рабочей ширине сельскохозяйственной рабочей машины 1 или переднего рабочего органа 2.
Детектирующее устройство 22 в данном случае и предпочтительно конфигурировано таким образом, чтобы определять высоту растений, т.е. абсолютную высоту или высотный профиль растений 3 в направлении движения перед сельскохозяйственной рабочей машиной 1, и на основании полученной разности высот растений или высотного профиля растений определять изменение высоты растений. В данном случае и предпочтительно детектирующее устройство 22 осуществляет непрерывный сбор данных. В принципе, детектирующее устройство может осуществлять дискретный, в частности, регулярный, сбор данных.
В предлагаемой сельскохозяйственной рабочей машине 1 система 11 автоматического копирования рельефа грунта содержит также устройство 26 зондирования рельефа грунта, которое в данном случае и предпочтительно содержит (не показанную на чертежах) копирующую скобу. Указанное устройство 26 зондирования рельефа грунта установлено на переднем рабочем органе 2 таким образом, чтобы оно обеспечивало возможность определять профиль грунта 12 в направлении движения перед сельскохозяйственной рабочей машиной 1 и/или под передним рабочим органом 2. Зондирование рельефа грунта 12 можно осуществлять контактным способом, например, при помощи указанной копирующей скобы, или бесконтактным способом, например, при помощи оптической системы. В принципе, может быть также предусмотрено несколько указанных устройств 26 зондирования рельефа грунта, распределенных, в частности, по всей рабочей ширине сельскохозяйственной рабочей машины 1 или переднего рабочего органа 2.
На основании полученной разности высот грунта 12 система 11 автоматического копирования рельефа грунта регулирует расстояние от переднего рабочего органа 2 до грунта 12 с учетом установленной чувствительности. В данном случае и предпочтительно система 11 автоматического копирования рельефа грунта с соответствующей установленной чувствительностью регулирует, как положение по высоте, так и поперечное положение переднего рабочего органа 2.
Перечень ссылочных обозначений
1 Сельскохозяйственная рабочая машина
2 Передний рабочий орган
3 Растения
4 Убираемая культура
5 Привод ходовой части
6 Жатка
7 Молотильный аппарат
8 Сепарирующее устройство
9 Очистительное устройство
10 Распределительное устройство
11 Система автоматического копирования рельефа грунта
12 Грунт
13 Система помощи водителю
14 Запоминающее устройство
15 Вычислительное устройство
16а,b Неровности грунта
17а Спуск рельефа
17b Подъем рельефа
18 Режущий орган
19 Мотовило
20 Средство сцепления с грунтом
21 Ходовая часть
22 Детектирующее устройство
23 Камера
24 Крыша кабины водителя
25 Регистрируемая область
26 Устройство зондирования рельефа грунта
Р1 Первая реперная точка
Р2 Вторая реперная точка
а Расстояние между реперными точками
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВОМ ДЕТЕКТИРОВАНИЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2016 |
|
RU2731733C2 |
| ОЧЕСЫВАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2443097C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ДЛЯ УБОРОЧНОГО РАБОЧЕГО ОРГАНА | 2019 |
|
RU2786639C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| Сельскохозяйственная машина для уборки гороха | 1976 |
|
SU884548A3 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА (ВАРИАНТЫ) | 2001 |
|
RU2264700C2 |
| НАВЕСКА ЖАТКИ | 2012 |
|
RU2498552C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2621252C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2018 |
|
RU2769473C2 |
Изобретение относится к сельскому хозяйству. Сельскохозяйственная рабочая машина, в частности уборочная машина, содержит передний рабочий орган для выполнения или поддержки выполнения сельскохозяйственной работы в растениях с убираемой культурой, а также систему автоматического копирования рельефа грунта для регулирования расстояния от переднего рабочего органа до грунта при прохождении через растения и детектирующее устройство, выполненное с возможностью регистрирования растений в направлении движения перед машиной. Детектирующее устройство выполнено с возможностью определения высоты или высотного профиля растений в направлении движения перед машиной и обнаружения изменения высоты растений на основании определенной разности высот или высотного профиля растений. Система автоматического копирования рельефа грунта выполнена с возможностью заранее учитывать обнаруженное изменение высоты растений и на основании обнаруженного изменения высоты растений адаптировать чувствительность регулирования системы автоматического копирования рельефа грунта. Обеспечивается повышение комфортности эксплуатации сельскохозяйственной рабочей машины при прохождении через растения. 12 з.п. ф-лы, 2 ил.
1. Сельскохозяйственная рабочая машина (1), в частности уборочная машина, содержащая передний рабочий орган (2) для выполнения или поддержки выполнения сельскохозяйственной работы в растениях (3) с убираемой культурой (4), а также систему (11) автоматического копирования рельефа грунта для регулирования расстояния от переднего рабочего органа (2) до грунта (12) при прохождении через растения (3),
отличающаяся тем, что указанная машина (1) содержит детектирующее устройство (22), выполненное с возможностью регистрирования растений (3) в направлении движения перед машиной (1),
причем детектирующее устройство (22) выполнено с возможностью определения высоты или высотного профиля растений (3) в направлении движения перед машиной (1) и обнаружения изменения высоты растений на основании определенной разности высот или высотного профиля растений,
причем указанная система (11) автоматического копирования рельефа грунта выполнена с возможностью заранее учитывать обнаруженное изменение высоты растений (3) и на основании обнаруженного изменения высоты растений адаптировать чувствительность регулирования системы (11) автоматического копирования рельефа грунта.
2. Машина (1) по п. 1, отличающаяся тем, что предусмотрена возможность сравнения обнаруженного изменения высоты растений с предварительно установленным заданным значением изменения высоты растений.
3. Машина (1) по п. 1 или 2, отличающаяся тем, что обнаруженное изменение высоты растений представляет собой среднее изменение высоты растений, определяемое на протяжении заданного участка.
4. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что предусмотрена возможность повышения чувствительности регулирования системы (11) автоматического копирования рельефа грунта при превышении предварительно установленного заданного значения изменения высоты растений.
5. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что предусмотрена возможность повышения чувствительности регулирования системы (11) автоматического копирования рельефа грунта при превышении предварительно установленного заданного значения изменения высоты растений для заданного участка (Х2) и/или интервала времени, а затем уменьшения, в частности, до значения чувствительности, установленного перед повышением.
6. Машина (1) по п. 5, отличающаяся тем, что заданный участок (Х2), на протяжении которого предусмотрено поддержание повышенной чувствительности регулирования системы (11) автоматического копирования рельефа грунта, соответствует по меньшей мере расстоянию (а) между реперной точкой (Р1) на переднем рабочем органе (2) и находящейся на расстоянии от нее в продольном направлении реперной точкой (Р2) на машине (1).
7. Машина (1) по п. 6, отличающаяся тем, что реперная точка (Р1) на переднем рабочем органе (2)
- представляет собой место на детали (18, 19) переднего рабочего органа (2), проходящей поперек продольного направления, при этом указанное место или указанная деталь (18, 19) при прохождении через растения (3) прежде всего вступает в контакт с убираемой культурой (4), и/или
- представляет собой место на режущем органе (18) или на мотовиле (19) переднего рабочего органа (2), в частности на передней кромке режущего органа (18) или мотовила (19).
8. Машина (1) по п. 6 или 7, отличающаяся тем, что реперная точка (Р2) на машине (1)
- представляет собой место на детали (20) машины (1), которая при прохождении через растения (3) вступает в контакт с грунтом (12), и/или
- представляет собой место на заднем средстве (20) сцепления с грунтом ходовой части (21) машины (1), в частности посередине опорной поверхности средства (20) сцепления с грунтом относительно продольного направления.
9. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что чувствительность регулирования системы (11) автоматического копирования рельефа грунта может быть установлена по меньшей мере на первом значении и на более высоком втором значении, при этом между первым значением и вторым значением может быть также установлено, в частности, по меньшей мере одно промежуточное значение.
10. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что детектирующее устройство (22) содержит камеру (23), радиолокационный датчик, инфракрасный датчик, лазерный датчик и/или ультразвуковой датчик.
11. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что детектирующее устройство (22) выполнено с возможностью осуществления непрерывного или дискретного, в частности регулярного, регистрирования высоты растений (3).
12. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что система (11) автоматического копирования рельефа грунта содержит устройство (26) зондирования рельефа грунта, снабженное, в частности, копирующей скобой, установленное на переднем рабочем органе (2) и обеспечивающее возможность зондирования рельефа грунта (12) в направлении движения перед машиной (1) и/или под передним рабочим органом (2) контактным или бесконтактным способом, при этом система (11) автоматического копирования рельефа грунта выполнена с возможностью - на основании определенной при зондировании разности высот грунта (12) - регулирования расстояния от переднего рабочего органа (2) до грунта (12) с учетом установленной чувствительности регулирования системы (11) автоматического копирования рельефа грунта.
13. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что система (11) автоматического копирования рельефа грунта выполнена с возможностью регулирования положения по высоте и/или поперечного положения переднего рабочего органа (2) относительно грунта (12) с соответствующей установленной чувствительностью.
| US 9585309 B2, 07.03.2017 | |||
| АНТЕННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ КОРОТКОВОЛНОВОГО И СРЕДНЕВОЛНОВОГО ДИАПАЗОНОВ | 1986 |
|
SU1374661A1 |
| US 6615570 B2, 09.09.2003 | |||
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ДОКУМЕНТИРОВАНИЯ СИТУАЦИЙ ПРИ ПОЛЕВЫХ РАБОТАХ | 2012 |
|
RU2605775C2 |

