Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственной рабочей машине с признаками, указанными в ограничительной части пункта 1 формулы изобретения, а также к способу управления сельскохозяйственной рабочей машиной с признаками, указанными в ограничительной части пункта 10 формулы изобретения.
Указанная сельскохозяйственная рабочая машина может представлять собой любую сельскохозяйственную рабочую машину, которая содержит навесной агрегат и служит для выполнения сельскохозяйственного рабочего задания. К таким машинам относятся, например, тягачи, оснащенные сельскохозяйственными навесными агрегатами, в частности, тракторы, а также уборочные машины, например зерноуборочные комбайны, кормоуборочные комбайны или т.п.В данном случае в первую очередь имеются в виду тягачи с навесными агрегатами.
Уровень техники
В настоящее время в рамках развития автоматизации сельскохозяйственных рабочих машин они часто оснащаются сенсорными устройствами, которые оказывают помощь оператору во время движения и выполнения сельскохозяйственных работ. В частности, они позволяют осуществлять контроль и управление навесными агрегатами сельскохозяйственной рабочей машины, т.е. агрегатами, которые присоединены к транспортному средству для выполнения сельскохозяйственной работы или для оказания помощи в ее выполнении. К навесным агрегатам относят, в частности, косилки или жатки, ворошилки, валкователи, пресс-подборщики или почвообрабатывающие агрегаты, как, например, плуги, культиваторы, бороны или т.п.
Известная сельскохозяйственная рабочая машина (US 2013/0340401 А1), являющееся прототипом настоящего изобретения, в качестве навесного агрегата содержит косилку, в которой имеется несколько вращающихся ножевых блоков с электрическим приводом. При этом сенсорное устройство отслеживает качество резки и производительность, которые могут изменяться при изменении плотности культуры, и в случае необходимости обеспечивает индивидуальную настройку отдельных ножевых блоков, которые служат в качестве рабочих органов, при помощи устройств управления и регулирования агрегата. Недостаток этой известной рабочей машины заключается в том, что сравнительно большая часть урожая оказывается убранной с ухудшенным качеством резки или пониженной производительностью, прежде чем оптимизируется настройка параметров ножевых блоков.
Раскрытие сущности изобретения
Задачей изобретения является модернизация и усовершенствование известной сельскохозяйственной рабочей машины таким образом, чтобы обеспечить эффективную оптимизацию параметров приводимых в действие рабочих органов навесного агрегата.
Эта задача решена сельскохозяйственной рабочей машиной согласно ограничительной части пункта 1 формулы изобретения с признаками, указанными в отличительной части пункта 1 формулы изобретения.
Важным является тот факт, что установка сенсорного устройства, которое в области впереди расположенного поля, т.е. в области перед навесным агрегатом по направлению движения, регистрирует состояние убираемой культуры, позволяет заранее распознать изменения параметров убираемой культуры, которые оказывают влияние на качество резки и производительность. Поэтому необходимые меры по оптимизации могут быть предприняты гораздо раньше, чем в случае известного уровня техники. Необходимая адаптация параметров может предпочтительно предприниматься или даже уже заканчиваться при достижении зарегистрированного изменения состояния убираемой культуры. Благодаря этому, уборку культуры можно производить с гораздо лучшим качеством резки и производительностью, чем в случае известного уровня техники.
Для предлагаемой сельскохозяйственной рабочей машины, в частности, предусмотрено, чтобы сенсорное устройство регистрировало состояние убираемой культуры в области по меньшей мере перед одним рабочим органом навесного агрегата, и в зависимости от зарегистрированного состояния осуществлялась адаптация по меньшей мере одного параметра рабочего органа или по меньшей мере одного из рабочих органов, при этом указанный параметр или по меньшей мере один из параметров представляет собой частоту вращения привода соответствующего рабочего органа.
В принципе, в зависимости от применяемого навесного агрегата и/или от выполняемой сельскохозяйственной работы могут адаптироваться также и другие параметры указанного по меньшей мере одного рабочего органа, при этом в качестве некоторых примеров можно назвать расстояние рабочего органа до грунта (расстояние до земли), позицию соответствующего рабочего органа перпендикулярно направлению движения, угол наклона соответствующего рабочего органа относительно поверхности грунта и/или относительно направления движения и положение ножа в ножевом блоке.
Состояние убираемой культуры, которое может регистрироваться сенсорным устройством, представляет собой, в частности, плотность неубранной культуры, но, в принципе, может также представлять собой плотность убранной культуры, уложенной на грунт и/или состояние грунта (пункт 2 формулы изобретения). Благодаря регистрации состояния грунта, могут быть, например, обнаружены неровности грунта, на которые можно своевременно среагировать путем настройки расстояния до грунта соответствующего рабочего органа.
Согласно пункту 3 формулы изобретения навесной агрегат может быть расположен спереди или сзади относительно направления движения. В частности, косилки могут быть присоединены к тягачу спереди или сзади. Возможно также присоединение навесного агрегата, например, косилок, как спереди, так и сзади, при этом адаптация одного или более параметров соответствующего рабочего органа осуществляется индивидуально для переднего и заднего навесного агрегата.
Наряду с косилкой в качестве навесного агрегата могут быть также предусмотрены ворошилка, валкователь, пресс-подборщик или почвообрабатывающий агрегат (пункт 4 формулы изобретения). Рабочий орган навесного агрегата, один или более параметров которого могут быть адаптированы, может представлять собой ножевой блок, в частности, вращающийся или поступательно перемещающийся ножевой блок косилки, рабочее колесо ворошилки или валкователя, прессующий узел пресс-подборщика или почвообрабатывающий узел почвообрабатывающего агрегата, например, приводимые во вращение элементы бороны или т.п.
Пункт 5 формулы изобретения определяет различные варианты осуществления сенсорного устройства.
В пунктах 6 и 7 формулы изобретения определены различные возможности осуществления адаптации по меньшей мере одного параметра рабочего органа. Так, в случае необходимости требуемую адаптацию соответствующего параметра предпочтительно выполнять автоматически (пункт 6 формулы изобретения), однако, в принципе, возможно также ее проведение по соответствующему указанию оператором (пункт 7 формулы изобретения). Это относится, в частности, к настройке частоты вращения привода соответствующего рабочего органа, но, как правило, может распространяться и на другие параметры рабочего органа.
Пункт 8 формулы изобретения определяет различные возможности регулирования частоты вращения привода и/или по меньшей мере одного иного параметра.
Пункт 9 формулы изобретения определяет предпочтительные места установки отдельных компонентов, необходимых для осуществления адаптации по меньшей мере одного параметра рабочего органа. Так, например, сенсорное устройство предпочтительно является компонентом навесного агрегата, а устройство управления и регулирования - компонентом тягача.
В пункте 10 формулы изобретения, который имеет самостоятельное значение, представлен способ управления предлагаемой сельскохозяйственной рабочей машиной.
Существенным в предлагаемом способе является то, что сенсорное устройство регистрирует состояние убираемой культуры в области перед по меньшей мере одним рабочим органом навесного агрегата, и в зависимости от зарегистрированного состояния осуществляет адаптацию по меньшей мере одного параметра рабочего органа или по меньшей мере одного из рабочих органов, при этом указанный параметр или по меньшей мере один из указанных параметров представляет собой частоту вращения привода соответствующего рабочего органа.
Краткое описание чертежей
Ниже изобретение разъяснено подробнее при помощи чертежей, отражающих исключительно варианты его осуществления. На чертежах показаны:
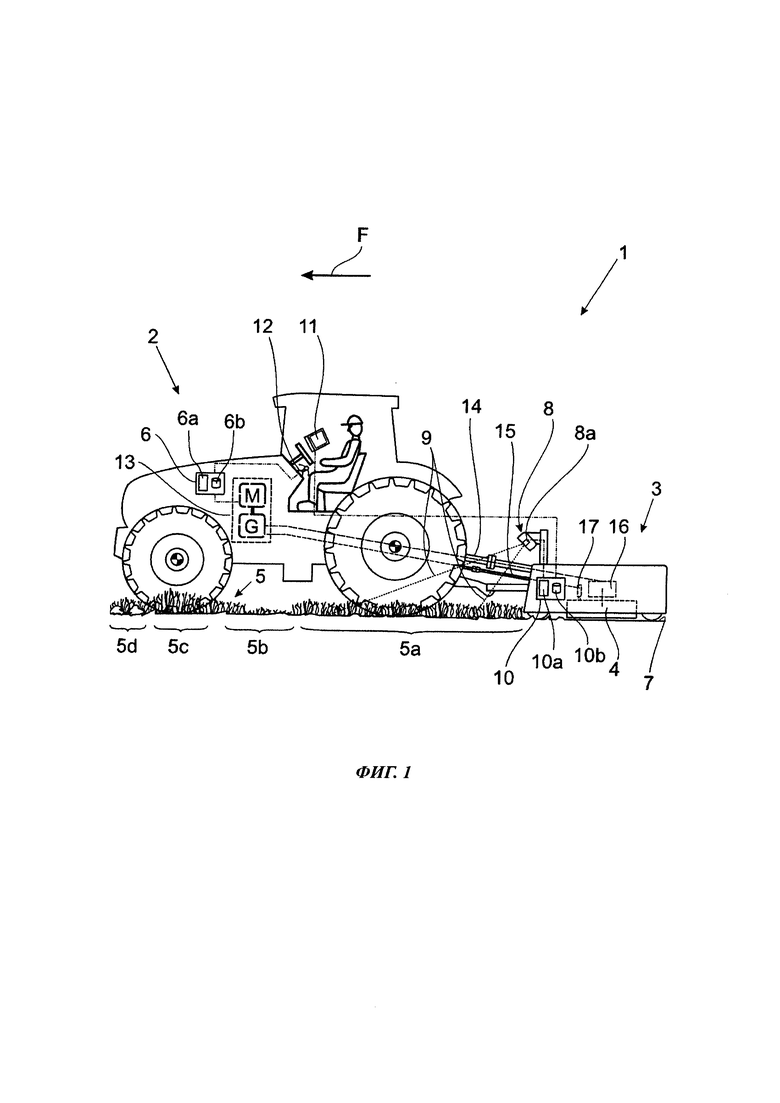
фиг. 1 схематическое изображение первого варианта осуществления предлагаемой сельскохозяйственной рабочей машины и
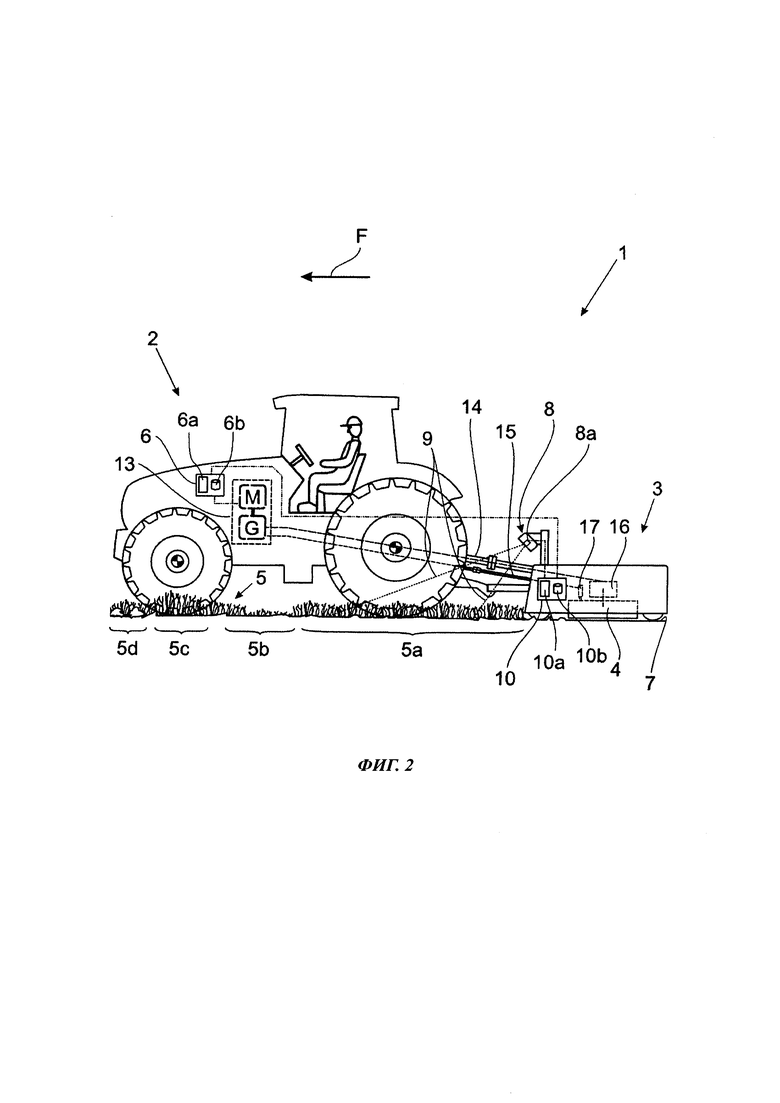
фиг. 2 схематическое изображение второго варианта осуществления предлагаемой сельскохозяйственной рабочей машины.
Осуществление изобретения
Предлагаемое решение может быть использовано для широкого спектра сельскохозяйственных рабочих машин. К таким машинам относятся тягачи, оснащенные навесными агрегатами, в частности тракторы, а также уборочные машины, в частности зерноуборочные комбайны, кормоуборочные комбайны или т.п. В вариантах осуществления, представленных на фиг. 1 и 2 и являющихся предпочтительными, сельскохозяйственная рабочая машина 1 представляет собой тягач 2, в данном случае трактор, который обычном образом оснащен сельскохозяйственным навесным агрегатом 3. В качестве сельскохозяйственного навесного агрегата 3 в данном случае только в качестве примера показана косилка. С учетом направления F движения навесной агрегат 3 присоединен к тягачу 2 сзади, однако, возможно также присоединение навесных агрегатов к тягачу 2 спереди. Навесной агрегат 3 в данном случае содержит несколько приводимых в действие рабочих органов 4, которые предназначены для обработки убираемой культуры 5, и которые представляют собой, в частности, ножевые блоки косилки. Варианты осуществления тягача 2, оснащенного навесным агрегатом 3, являются пригодными для любых других видов сельскохозяйственных машин или сельскохозяйственных навесных агрегатов, соответственно.
Тягач 2 и навесной агрегат 3 обслуживаются одним оператором, водителем, для оказания помощи которому в тягаче 2 предусмотрено устройство 6 управления и регулирования, точный принцип работы которого более подробно разъяснен ниже. Устройство 6 управления и регулирования, которое может содержать процессор 6а и запоминающее устройство 6b, служит здесь, главным образом, для того, чтобы обеспечивать регулирование по меньшей мере одного параметра, в частности, по меньшей мере частоты вращения привода рабочих органов 4. Другими соответствующими регулируемыми параметрами рабочих органов 4 в данном случае и предпочтительно являются расстояние до грунта, положение поперек направления F движения, угол наклона относительно грунта 7 и/или относительно направления F движения и/или положение ножа в ножевом блоке.
Указанная адаптация или указанное регулирование параметра "частота вращения привода", а также одного или более других параметров осуществляется в зависимости от зарегистрированного сенсорным образом состояния убираемой культуры 5. Для этого предусмотрено сенсорное устройство 8, которое регистрирует область убираемой культуры 5 в направлении F движения перед навесным агрегатом 3, называемую также передней областью. Под состоянием убираемой культуры 5, которую в данном случае регистрирует сенсорное устройство 8, в представленном варианте осуществления понимается плотность неубранной культуры, которая в данном случае представляет собой траву. Состояние убираемой культуры 5 охватывает здесь также состояние грунта 7. В других областях применения, если навесной агрегат 3 представляет собой, например, ворошилку или валкователь, состояние убираемой культуры 5 может также включать плотность убранной культуры, уложенной на грунт 7.
В данном случае в качестве примера представлены четыре различных участка 5а-5d убираемой культуры 5, каждый из которых имеет разное состояние. Так, например, состояние убираемой культуры 5 на участке 5а представляет собой среднее состояние, т.е. высота и плотность растений, которые совместно характеризуют плотность убираемой культуры, являются здесь средними, а грунт 7 - сравнительно ровным. В отличие от этого на участке 5b убираемой культуры 5 имеет место пониженная плотность убираемой культуры. На участке 5 с плотность убираемой культуры, в свою очередь, превышает среднюю величину. Участок 5d снова имеет среднюю плотность убираемой культуры, однако, отличается весьма неровным грунтом 7.
Убираемая культура 5 или ее состояние регистрируется сенсорным устройством 8. Для этой цели сенсорное устройство 8 содержит датчик 8а, область 9 регистрации которого ориентирована на участок 5а. В принципе, могут быть предусмотрены также несколько датчиков 8а. Указанные один или более датчиков 8а могут представлять собой оптические, ультразвуковые, радиолокационные и/или лидарные датчики.
Два варианта осуществления, показанные на фиг. 1 и 2, отличаются тем, что согласно фиг. 1 регулирование или адаптация соответствующих параметров, в данном случае конкретно - частоты вращения привода рабочего органа 4 и угла наклона рабочего органа 4 относительно грунта 7 и направления F движения, осуществляется оператором, а согласно фиг. 2 - автоматически.
Вначале в обоих вариантах осуществления сенсорное устройство 8 генерирует данные от датчиков, соответствующие зарегистрированному состоянию убираемой культуры 5, и передает их в вычислительный блок 10, который в данном случае содержит процессор 10а и запоминающее устройство 10b. В запоминающем устройстве 10b сохраняются пары данных, характеристические кривые, поля характеристик или т.п., которые сопоставляют показания датчиков или области показаний датчиков с соответствующими определенными требуемыми значениями параметров, подлежащих регулировке. При этом определенные показания датчиков или области показаний датчиков, соответствующие, например, определенной плотности убираемой культуры, могут сопоставляться с различными требуемыми значениями частоты вращения привода рабочих органов 4 или их угла наклона относительно грунта 7 и/или направления F движения. Возможны также соответствующие сопоставления показаний датчиков или областей показаний датчиков, которые относятся к состоянию грунта 7. На основании таких показаний датчиков сенсорного устройства 8 вычислительный блок 10 рассчитывает требуемое значение для параметров, подлежащих регулировке, например, для частоты вращения привода и угла наклона рабочих органов 4 относительно грунта 7 и/или относительно направления F движения.
Затем в варианте осуществления, показанном на фиг. 1, на блоке 11 индикации в зависимости от требуемого значения отображается информация или указание для оператора, на основании которых оператор при помощи панели 12 управления может осуществлять регулирование соответствующего параметра рабочих органов 4. Отображаемая информация может представлять собой, например, непосредственно требуемое значение или результат сравнения требуемого значения с текущим фактическим значением. Соответствующие фактические значения определенных параметров, например, частоты вращения привода и/или угла наклона одного или более рабочих органов 4, могут также определяться при помощи сенсорного устройства (не показано). Затем через панель 12 управления, которая в данном случае в качестве примера представляет собой рычаг управления, соответствующая команда подается на устройство 6 управления и регулирования, осуществляющее управление главным приводом 13 тягача 2, в частности, двигателем М и/или коробкой G передач, чтобы таким образом достичь соответствующего требуемого значения для регулируемого параметра рабочих органов 4.
Путем регулирования работы двигателя М и/или коробки G передач можно осуществлять регулирование частоты вращения вала 14 отбора мощности тягача 2 и/или регулирование объемных потоков гидравлической среды в гидравлическом контуре 15. При помощи устройства управления и регулирования дополнительно или альтернативно этому можно также изменять отдачу мощности электрическим приводом (не показан). Регулирование частоты вращения вала отбора мощности, объемных потоков гидравлической среды и/или отдачи мощности электрическим приводом в конечном итоге обеспечивает регулирование соответствующего параметра рабочих органов 4. Так, например, в показанных вариантах осуществления при изменении частоты вращения вала отбора мощности, соответственно, изменяется частота вращения установленного со стороны навесного агрегата привода 16 рабочих органов 4, в данном случае - ножевых блоков. Путем изменения объемных потоков гидравлической среды в данном случае, например, осуществляется управление установленным со стороны навесного агрегата гидравлическим цилиндром 17, при помощи которого можно настраивать угол наклона рабочих органов 4.
Вариант осуществления, показанный на фиг. 2, отличается от вышеописанного варианта осуществления тем, что адаптация или регулирование соответствующего параметра рабочих органов 4 осуществляется автоматически без необходимости вмешательства оператора. Таким образом, устройство 6 управления и регулирования в зависимости от соответствующего требуемого значения автоматически регулирует частоту вращения привода и один или более других параметров рабочих органов 4.
В заключение следует отметить, что в описанных и показанных на фиг. 1 и 2 вариантах осуществления сенсорное устройство 8, а также по меньшей мере один датчик 8а установлены на навесном агрегате 3. То же самое относится к вычислительному блоку 10. Однако, в принципе, возможно также, чтобы отдельные или все эти компоненты были установлены на тягаче 2. Устройство 6 управления и регулирования, которое обеспечивает регулирование соответствующего параметра, также в данном случае является компонентом тягача 2 и управляет, в частности, главным приводом 13. Однако, в принципе, возможно также, чтобы устройство 6 управления и регулирования являлось компонентом навесного агрегата 3, в частности, компонентом вычислительного блока 10. Блок 11 индикации и панель 12 управления представлены в виде компонентов тягача 2, что является предпочтительным. Однако, в принципе, возможно, чтобы блок 11 индикации и/или панель 12 управления были предусмотрены на навесном агрегате 3.
Перечень ссылочных обозначений
1 Сельскохозяйственная рабочая машина
2 Тягач
3 Навесной агрегат
4 Рабочий орган
5 Убираемая культура
6 Устройство управления и регулирования
7 Грунт
8 Сенсорное устройство
9 Область регистрации
10 Вычислительный блок
11 Блок индикации
12 Панель управления
13 Главный привод
14 Вал отбора мощности
15 Гидравлический контур
16 Привод рабочего органа
17 Гидравлический цилиндр
F Направление движения
G Коробка передач
М Двигатель привода
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА | 2021 |
|
RU2816600C2 |
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТЯГАЧ | 2020 |
|
RU2821862C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| СИМУЛЯТОР СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2014 |
|
RU2657617C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2018 |
|
RU2768678C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОЧИХ ПРОЦЕССОВ | 2019 |
|
RU2802847C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ ЭКСПЛУАТАЦИИ ТАКОЙ МАШИНЫ | 2013 |
|
RU2627204C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2019 |
|
RU2791139C2 |
Группа изобретений относится к области сельского хозяйства. Рабочая машина (1) представляет собой тягач (2), оснащенный сельскохозяйственным навесным агрегатом (3), содержащим по меньшей мере один приводимый в действие рабочий орган (4) для обработки убираемой культуры (5). Сенсорное устройство (8) выполнено с возможностью регистрирования состояния убираемой культуры (5) в области перед по меньшей мере одним рабочим органом (4) навесного агрегата (3) и в зависимости от зарегистрированного состояния осуществления адаптации по меньшей мере одного параметра рабочего органа (4). Указанный параметр представляет собой частоту вращения привода рабочего органа (4). Сенсорное устройство (8) выполнено с возможностью генерирования данных от датчиков, соответствующих зарегистрированному состоянию, и передачи их в вычислительный блок (10). Вычислительный блок (10) выполнен с возможностью, на основании указанных данных от датчиков, определения требуемого значения для частоты вращения привода рабочего органа (4). Устройство (6) управления и регулирования выполнено с возможностью в зависимости от требуемого значения автоматического осуществления регулирования частоты вращения привода рабочего органа (4). Вычислительный блок (10) установлен на навесном агрегате (3). Устройство (6) управления и регулирования установлено на тягаче (2). Способ состоит в управлении рабочей машиной (1), представляющей собой тягач (2), оснащенный сельскохозяйственным навесным агрегатом (3), содержащим по меньшей мере один приводимый в действие рабочий орган (4) для обработки убираемой культуры (5). Посредством сенсорного устройства (8) в области перед по меньшей мере одним рабочим органом (4) навесного агрегата (3) регистрируют состояние убираемой культуры (5) и в зависимости от зарегистрированного состояния осуществляют адаптацию по меньшей мере одного параметра рабочего органа (4). Указанный параметр представляет собой частоту вращения привода рабочего органа (4). Сенсорное устройство (8) выполнено с возможностью генерирования данных от датчиков, соответствующих зарегистрированному состоянию, и передачи их в вычислительный блок (10). Вычислительный блок (10) выполнен с возможностью, на основании указанных данных от датчиков, определения требуемого значения для частоты вращения привода рабочего органа (4). Устройство (6) управления и регулирования выполнено с возможностью в зависимости от требуемого значения автоматического осуществления регулирования частоты вращения привода рабочего органа (4). Вычислительный блок (10) устанавливают на навесном агрегате (3). Устройство (6) управления и регулирования устанавливают на тягаче (2). Обеспечивается эффективная оптимизация параметров приводимых в действие рабочих органов навесного агрегата. 2 н. и 5 з.п. ф-лы, 2 ил.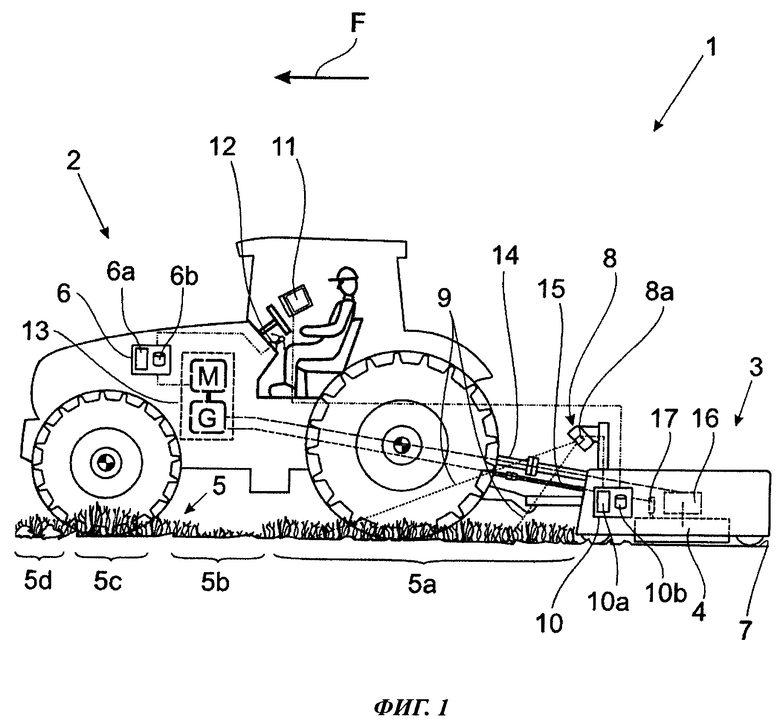
1. Сельскохозяйственная рабочая машина с тягачом (2), в частности с трактором, и с сельскохозяйственным навесным агрегатом (3), содержащим по меньшей мере один приводимый в действие рабочий орган (4) для обработки убираемой культуры (5), причем сенсорное устройство (8) выполнено с возможностью регистрирования состояния убираемой культуры (5) в области перед по меньшей мере одним рабочим органом (4) навесного агрегата (3) и в зависимости от зарегистрированного состояния осуществления адаптации по меньшей мере одного параметра рабочего органа (4), при этом указанный параметр представляет собой частоту вращения привода рабочего органа (4), причем сенсорное устройство (8) выполнено с возможностью генерирования данных от датчиков, соответствующих зарегистрированному состоянию, и передачи их в вычислительный блок (10), при этом вычислительный блок (10) выполнен с возможностью, на основании указанных данных от датчиков, определения требуемого значения для частоты вращения привода рабочего органа (4), и при этом устройство (6) управления и регулирования выполнено с возможностью в зависимости от требуемого значения автоматического осуществления регулирования частоты вращения привода рабочего органа (4), отличающаяся тем, что вычислительный блок (10) установлен на навесном агрегате (3), и устройство (6) управления и регулирования установлено на тягаче (2).
2. Машина по п. 1, отличающаяся тем, что сенсорное устройство (8) выполнено с возможностью регистрации, в качестве состояния убираемой культуры (5), плотности неубранной культуры, плотности убранной культуры, уложенной на грунт (7), и/или состояния грунта (7).
3. Машина по п. 1 или 2, отличающаяся тем, что навесной агрегат (3) установлен на тягаче (2) спереди или сзади относительно направления (F) движения сельскохозяйственной рабочей машины (1).
4. Машина по одному из предшествующих пунктов, отличающаяся тем, что навесной агрегат (3) представляет собой косилку, ворошилку, валкователь, пресс-подборщик или почвообрабатывающий агрегат, и/или рабочий орган (4) представляет собой ножевой блок косилки, рабочее колесо ворошилки или валкователя, прессующий узел пресс-подборщика или почвообрабатывающий узел почвообрабатывающего агрегата.
5. Машина по одному из предшествующих пунктов, отличающаяся тем, что сенсорное устройство (8) содержит по меньшей мере один датчик (8а) в виде оптического датчика, ультразвукового датчика, радиолокационного датчика и/или лидарного датчика.
6. Машина по одному из предшествующих пунктов, отличающаяся тем, что осуществление регулирования частоты вращения привода рабочего органа (4) предусмотрено посредством регулирования частоты вращения вала отбора мощности тягача (2), регулирования объемных потоков гидравлической среды и/или регулирования отдачи мощности электрическим приводом.
7. Способ управления сельскохозяйственной рабочей машиной (1) с тягачом (2), в частности с трактором, и с сельскохозяйственным навесным агрегатом (3), содержащим по меньшей мере один приводимый в действие рабочий орган (4) для обработки убираемой культуры (5), причем посредством сенсорного устройства (8) в области перед по меньшей мере одним рабочим органом (4) навесного агрегата (3) регистрируют состояние убираемой культуры (5) и в зависимости от зарегистрированного состояния осуществляют адаптацию по меньшей мере одного параметра рабочего органа (4), при этом указанный параметр представляет собой частоту вращения привода рабочего органа (4), причем сенсорное устройство (8) выполнено с возможностью генерирования данных от датчиков, соответствующих зарегистрированному состоянию, и передачи их в вычислительный блок (10), при этом вычислительный блок (10) выполнен с возможностью, на основании указанных данных от датчиков, определения требуемого значения для частоты вращения привода рабочего органа (4), и при этом устройство (6) управления и регулирования выполнено с возможностью в зависимости от требуемого значения автоматического осуществления регулирования частоты вращения привода рабочего органа (4), отличающийся тем, что вычислительный блок (10) установлен на навесном агрегате (3), и устройство (6) управления и регулирования установлено на тягаче (2).
| СТОЙКА ДЛЯ ПИТЕРБАСКЕТА | 2012 |
|
RU2517543C1 |
| DE 4239530 A1, 26.05.1994 | |||
| Подпорная стенка Кожина Ю.П. | 1990 |
|
SU1813142A3 |
| Аппарат для непрерывного разваривания измельченного сырья в спиртовой промышленности | 1936 |
|
SU51818A1 |

