ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области транспортировки грузов, в частности, к многофункциональным средствам и способу транспортировки грузов, применяемых для загрузки, разгрузки, перевозки и транспортировки грузов в аэропортах, вокзалах, складах, грузовых дворах, верфях и других местах между местом хранения и грузовым средством.
УРОВЕНЬ ТЕХНИКИ
Логистические сортировочные центры, такие как аэропорты, вокзалы, склады, грузовые дворы, верфи и т. д. значительно отличаются по способам загрузки, разгрузки, перевозки и транспортировки грузов разных размеров и веса от места хранения до грузового средства или от грузового средства до места хранения. Если взять, к примеру, аэропорт, наиболее распространенный груз для пассажирского самолета - это зарегистрированный багаж пассажиров. Обычно после прохождения проверки службой безопасности аэропорта багаж поступает в грузовой отсек воздушного судна, проходя следующую последовательность операций: (1) багаж вручную переносится на первую багажную тележку и укладывается надлежащим образом; (2) после того, как первая тележка будет заполнена, багаж укладывается на следующую багажную тележку; (3) головной тягач для буксировки множества багажных тележек, нагруженных багажом, управляется вручную и перевозит багаж к грузовому отсеку воздушного судна на стояночной площадке; (4) средство транспортировки багажа при помощи ручного управления располагается параллельно с дверью грузового отсека воздушного судна; (5) запускается конвейерная лента, багаж из багажных тележек вручную перекладывается на конвейерную ленту средства транспортировки багажа; (6) багаж с помощью конвейерной ленты подается в дверь грузового отсека; (7) багаж вручную переносится от двери грузового отсека внутрь грузового отсека. Процесс передачи багажа из грузового отсека воздушного судна в место сортировки багажа в аэропорту осуществляется в последовательности обратной описанной выше.
Как видно из вышеописанной последовательности операций, процесс обращения багажа или грузов между местом сортировки багажа в аэропорту и грузовым отсеком воздушного судна на стояночной площадке требует множества транспортных средств, включая головной тягач, багажную тележку, средство транспортировки багажа; большое количество персонала, включая водителя головного тягача, персонал для переноски багажа на багажную тележку, персонал для обращения с багажом на средстве транспортировки багажа, персонал для переноски багажа в грузовом отсеке воздушного судна; а также долгого времени обращения, включая перенос багажа дважды за 30 минут. Существующая технология и последовательность операций ограничивает эффективность использования и скорость обращения грузов телескопического трапа аэропорта, увеличивает интенсивность труда персонала, а также время транспортировки грузов, расходы на использование выходов на посадку и стоимость труда.
Аналогичные проблемы существуют в логистических сортировочных центрах, таких как вокзалы, склады, грузовые дворы, верфи и т. д.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Направленное на проблемы, существующие в современной технике, данное изобретение предлагает многофункциональное средство и способ транспортировки грузов, для того чтобы несколько транспортных средств с различными функциями, таких как три транспортных средства: багажный головной тягач, багажную тележку и средство подачи багажа аэропорта - объединить в одно многофункциональное средство транспортировки грузов, при этом реализуя многозадачный функционал по загрузке и разгрузке, транспортировке и подаче груза. Данная технология может применяться к смежным областям для уменьшения общей стоимости процесса транспортировки грузов и увеличения эффективности транспортировки грузов.
Соответственно, изобретение предлагает следующие технические решения.
Многофункциональное средство транспортировки грузов, как показано на Фиг. 1, включает в себя корпус транспортного средства 1, раму подачи грузов 2, подъемный механизм 3 и систему управления 4; рама подачи грузов расположена над корпусом транспортного средства и содержит множество уровней для загрузки и разгрузки грузов; подъемный механизм расположен с внешней стороны рамы подачи грузов для подъема рамы подачи грузов; система управления расположена на корпусе транспортного средства для управления автоматической погрузкой и разгрузкой грузов, движения во всех направлениях и точной стыковки многофункционального средства транспортировки грузов.
Предпочтительно, корпус транспортного средства содержит кузов, поворотное колесо, блок аккумуляторов, датчик, гидронасос и водительскую стойку; поворотное колесо закреплено в нижней части кузова для осуществления функций вождения транспортным средством во всех направлениях и точной остановки; блок аккумуляторов располагается на кузове и обеспечивает электропитание для создания тяговой мощности транспортного средства и обеспечения подачи и подъема грузов; датчик располагается в нижней части на периметре кузова для обеспечения функций определения препятствий, позиционирования и навигации; гидронасос располагается на кузове для приведения в движение рамы подачи грузов для осуществления подъемного движения; водительская стойка располагается в передней части корпуса транспортного средства для вождения человеком или автоматически.
Предпочтительно, рама подачи грузов содержит лоток, защитный барьер, двигатель, ведущий вал и направляющий ролик; двигатель, ведущий вал и направляющий ролик установлены внутри лотка, ведущий вал приводит во вращательное движение направляющий ролик под действием двигателя, чтобы заставить груз перемещаться; низ лотка соединен с подъемным механизмом, и вертикальное и горизонтальное движение лотка осуществляется под воздействием подъемного механизма; защитный барьер устанавливается сбоку, сзади, слева и справа лотка для предотвращения выпадения груза, и передний защитный барьер имеет подвижное соединение, чтобы в момент, когда груз перемещается на лоток или с него, передний защитный барьер менял свое положение из вертикального в горизонтальное, таким образом, облегчая загрузку и разгрузку грузов.
Предпочтительно, лоток имеет левый лоток, центральный лоток и правый лоток вдоль трех направлений слева, по центру и справа транспортного средства соответственно; двигатель - это управляющий двигатель, включающий в себя шаговый двигатель, сервопривод, двигатель с регулируемой частотой, который реализует программное управление состоянием движения; ведущий вал подсоединен к двигателю через редуктор скорости и подсоединен к направляющему ролику с помощью штифта; направляющий ролик имеет форму усеченного конуса с круглым поперечным сечением с двумя узкими концами и толстой серединой, поверхность имеет противоскользящую полосу.
Предпочтительно, рама подачи грузов выполнена в виде многоуровневого лотка для размещения множества грузов; левый лоток каждого из лотков имеет два ряда желобов для перемещения грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°, центральный лоток имеет желоб подачи грузов с углом наклона по горизонтали 0°, а правый лоток имеет два ряда желобов подачи грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°.
Предпочтительно, подъемный механизм выполнен в виде многоуровневого подъемника, количество уровней подъемника соответствует количеству уровней рамы подачи грузов; каждый уровень подъемников включает в себя соединительную штангу, установочный штифт и гидроцилиндр, причем множество соединительных штанг соединяются друг с другом с помощью установочных штифтов, а гидроцилиндр устанавливается между лотком и соединительной штангой; начиная с подъемника нижнего уровня, в точках крепления на двух концах подъемника каждого уровня один конец соединяется с лотком того же уровня, а другой конец соединяется с лотком предыдущего уровня; в точках крепления на двух концах подъемника верхнего уровня один конец соединяется с лотком верхнего уровня, а другой соединяется кузовом.
Предпочтительно, система управления содержит главную панель управления, модуль автоматического управления, навигационный модуль, модуль электрогидравлического управления и модуль управления движением; модуль автоматического управления, навигационный модуль, модуль электрогидравлического управления и модуль управления движением соответственно электрически соединены с главной панелью управления для осуществления управления различными функциями; модуль автоматического управления и навигационный модуль используются для осуществления управления вождением во всех направлениях, управления торможением, позиционированием и навигацией по траектории движения многофункционального средства транспортировки грузов; модуль электрогидравлического управления используется для осуществления управления подъемом подъемного механизма; модуль управления движением используется для управления движением многофункционального средства транспортировки грузов и загрузкой и разгрузкой грузов.
Способ транспортировки грузов при помощи многофункционального средства транспортировки грузов, в котором многофункциональное средство транспортировки грузов объединяет в себе множество транспортных средств с различными функциями в одном транспортном средстве и, в то же время, осуществляет многозадачные функции по загрузке и разгрузке, перевозке и подаче грузов, таким образом эффективно осуществляя процесс транспортировки грузов между местом хранения и грузовым средством; грузы в разных рядах двигаются плавно в процессе погрузки и разгрузки, при этом многоуровневый лоток способен складываться в стопку, когда груз отсутствует, и раскладываться при наличии груза; подъем многоуровневого подъемника управляется независимо; подъемник приводится в действие гидравлически, пневматически, электрически или сочетанием этих трех способов; система управления и многофункциональное средство транспортировки грузов, направляемое при помощи поворотного колеса, осуществляют движение вперед, назад, влево, вправо, выполняют поворот, разворот и другие движения, а также автономную навигацию и автоматическое управление движением в малом диапазоне расстояния.
Предпочтительно, под действием системы управления, подъемный механизм транспортирует груз из многофункционального средства транспортировки грузов на грузовое средство; во-первых, лоток верхнего уровня поднимается или опускается до уровня двери кабины грузового средства, груз поступает в грузовое средство, и после разгрузки, лоток верхнего уровня поднимается и становится выше уровня двери кабины грузового средства; во-вторых, лоток среднего уровня поднимается до уровня двери кабины грузового средства, груз поступает в грузовое средство, и после разгрузки, лоток среднего уровня поднимается и становится выше уровня двери кабины грузового средства и образует стопку вместе с лотком верхнего уровня; затем лоток нижнего уровня поднимается до уровня двери кабины грузового средства, груз поступает в грузовое средство, и после разгрузки, лоток нижнего уровня опускается к кузову; наконец, лоток среднего уровня опускается и располагается в стопке над лотком нижнего уровня, а лоток верхнего уровня опускается и располагается в стопке над лотком среднего уровня.
Предпочтительно, под действием системы управления, подъемный механизм транспортирует груз из грузового средства в многофункциональное средство транспортировки грузов; во-первых, трехуровневый лоток, сложенный в стопку, поднимается, лоток верхнего уровня и лоток среднего уровня оказываются выше двери кабины грузового средства, и лоток нижнего уровня достигает уровня двери кабины грузового средства; во-вторых, груз поступает на лоток нижнего уровня, и после загрузки лоток нижнего уровня опускается до кузова; затем лоток среднего уровня опускается до уровня двери кабины грузового средства, груз поступает в лоток среднего уровня, и после загрузки лоток среднего уровня опускается до положения над лотком нижнего уровня, полностью заполненного грузом; наконец, лоток верхнего уровня опускается до уровня двери грузового средства, груз поступает в лоток верхнего уровня, и после загрузки лоток верхнего уровня опускается до положения над лотком среднего уровня, полностью заполненного грузом.
По сравнению с известным уровнем техники изобретение обладает следующими преимуществами:
(1) Множество транспортных средств с различными функциями объединены в многофункциональное транспортное средство, эффективно осуществляющее процесс транспортировки груза от места хранения до грузового средства, одновременно реализуя многозадачные функции загрузки и разгрузки, транспортировки и подачи груза.
(2) Улучшается эффективность транспортировки грузов, уменьшается стоимость их транспортировки и пропускная способность, непосредственно увеличивается экономическая и социальная выгода логистического сортировочного центра.
(3) Изобретение может быть широко внедрено в зонах логистических сортировочных центров, таких как аэропорты, вокзалы, склады, грузовые дворы, верфи и т. д.
(4) Высокая степень автоматизации, простота использования.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
На Фиг. 1 показана конструкция многофункционального средства транспортировки грузов в соответствии с одним вариантом осуществления настоящего изобретения.
На Фиг. 2 показана конструкция корпуса транспортного средства многофункционального средства транспортировки грузов в соответствии с вариантом осуществления настоящего изобретения.
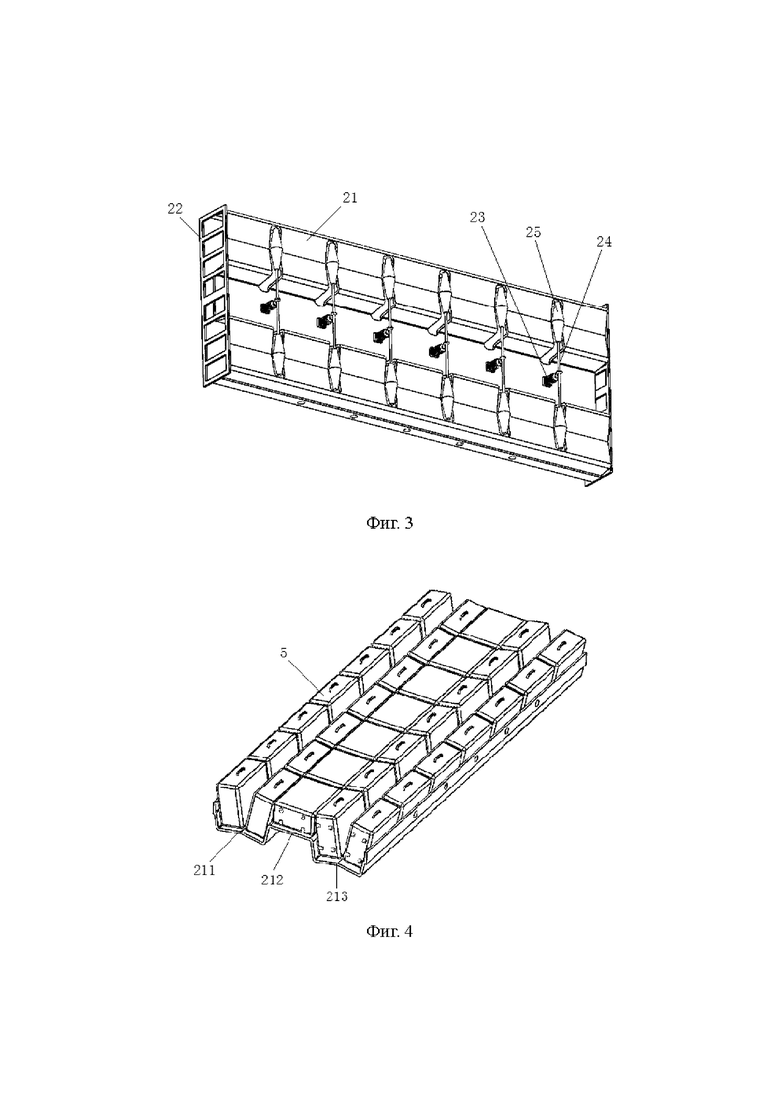
На Фиг. 3 показана конструкция нижней рамы подачи грузов многофункционального средства транспортировки грузов в соответствии с вариантом осуществления настоящего изобретения.
На Фиг. 4 показана конструкция верхней рамы подачи грузов многофункционального средства транспортировки грузов в соответствии с вариантом осуществления настоящего изобретения.
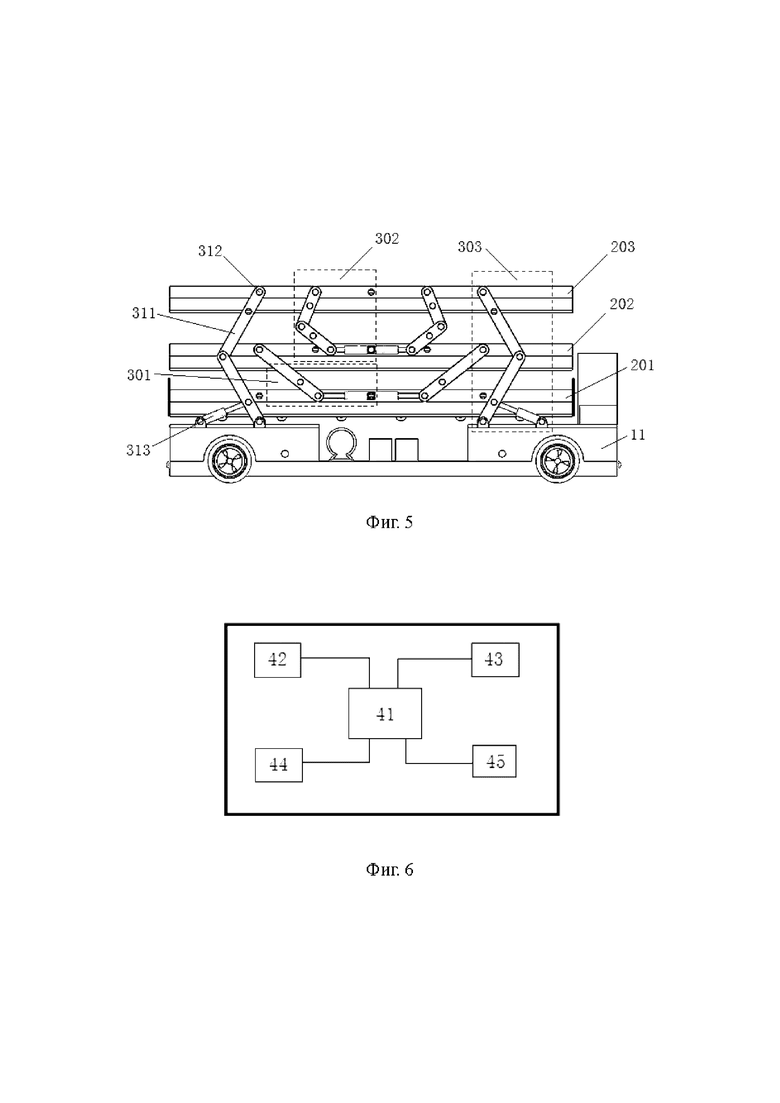
На Фиг. 5 показана конструкция подъемного механизма многофункционального средства транспортировки грузов в соответствии с вариантом осуществления настоящего изобретения.
На Фиг. 6 показана структура системы управления многофункционального средства транспортировки грузов в соответствии с вариантом осуществления настоящего изобретения.
Номерами обозначены следующие элементы: 1 - корпус транспортного средства; 2 - рама подачи грузов; 3 - подъемный механизм; 4 - система управления; 5 - груз; 11 - кузов; 12 - поворотное колесо; 13 - блок аккумуляторов; 14 - датчик; 15 - гидронасос; 16 - водительская стойка; 21 - лоток; 22 - защитный барьер; 23 - двигатель; 24 - ведущий вал; 25 - направляющий ролик; 201 - лоток нижнего уровня; 202 - лоток среднего уровня; 203 - лоток верхнего уровня; 211 - левый лоток; 212 - центральный лоток; 213 - правый лоток; 301 - подъемник нижнего уровня; 302 - подъемник среднего уровня; 303 - подъемник верхнего уровня; 311 - соединительная штанга; 312 - установочный штифт; 313 - гидроцилиндр; 41 - главная панель управления; 42 - модуль автоматического управления; 43 - навигационный модуль; 44 - модуль электрогидравлического управления; 45 - модуль управления движением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Подробное описание настоящего изобретения будет далее вестись со ссылками на прилагаемые чертежи и конкретные варианты осуществления. Конкретные варианты осуществления и описание приводятся с целью иллюстрации и не ограничивают настоящее изобретение.
Вариант осуществления
Многофункциональное средство транспортировки грузов, как показано на Фиг. 1, включает в себя корпус транспортного средства 1, раму подачи грузов 2, подъемный механизм 3 и систему управления 4. Передняя часть корпуса транспортного средства 1 имеет водительскую стойку 16, верхняя часть корпуса транспортного средства 1 имеет несколько уровней рам 2 подачи грузов, внешняя сторона рамы 2 подачи грузов снабжена подъемным механизмом 3, груз 5 располагается на раме 2 подачи грузов; система 4 управления осуществляет точную стыковку многофункционального средства транспортировки грузов и грузовой полки, или многофункционального средства транспортировки грузов и грузового средства, автоматическую загрузку груза на раму 2 подачи грузов и подъемный механизм 3 и их разгрузку.
Как показано на Фиг. 2, корпус 1 транспортного средства имеет кузов 11, поворотное колесо 12, блок аккумуляторов 13, датчик 14, гидронасос 15 и водительская стойку 16; поворотное колесо 12 закреплено в нижней части кузова 11 для осуществления функций вождения транспортным средством во всех направлениях и точного позиционирования; блок аккумуляторов 13 располагается на кузове и обеспечивает электропитание для создания тяговой мощности корпуса 1 транспортного средства и обеспечения подачи и подъема рамы 2 подачи грузов; датчик 14 располагается в нижней части на периметре кузова 11 и выполняет функции определения препятствий, позиционирования и навигации; гидронасос 15 располагается на кузове и приводит в движение раму 2 подачи грузов для осуществления подъемного движения; водительская стойка 16 располагается в передней части корпуса 1 транспортного средства, и может быть управляемой человеком или автоматически.
Как показано на Фиг. 3 и 4, рама 2 подачи грузов содержит лоток 21, защитный барьер 22, двигатель 23, ведущий вал 24 и направляющий ролик 25; лоток 21 имеет левый лоток 211, центральный лоток 212 и правый лоток 213, а грузы 5 соответственно располагаются на лотке 21; левый лоток 211 имеет два ряда желобов для перемещения грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°, центральный лоток 212 имеет желоб подачи грузов с углом наклона по горизонтали 0°, а правый лоток 213 имеет два ряда желобов подачи грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°; двигатель 23, ведущий вал 24 и направляющий ролик 25 располагаются внутри лотка 21; низ лотка 21 прикреплен к подъемному механизму 3; защитный барьер 22 располагается с передней, задней, левой и правой сторонах лотка; двигатель 23 соединен с ведущим валом 24 и направляющим роликом 25, направляющий ролик 25 имеет конструкцию в виде шпинделя, и на его поверхности есть противоскользящая полоса.
Возможен вариант конструкции, когда рама 2 подачи грузов оснащена трехуровневым лотком 21, соответственно, лотком 201 нижнего уровня, лотком 202 среднего уровня и лотком 203 верхнего уровня, способные вмещать 105 штук мест стандартного багажа размером 28 дюймов (~70 см).
Как показано на Фиг. 5, подъемный механизм 3 имеет множество подъемников; на рисунке показано, что он имеет 3 подъемника, включая подъемник нижнего уровня 301, подъемник среднего уровня 302 и подъемник верхнего уровня 303; каждый уровень подъемников имеет соединительную штангу 311, установочный штифт 312 и гидроцилиндр 313, множество соединительных штанг 311 соединяются друг с другом с помощью установочных штифтов 312, а гидроцилиндр 313 устанавливается между лотком 21 и соединительной штангой 311; в точках крепления на двух концах подъемника нижнего уровня 301 один конец соединяется с лотком 201 нижнего уровня, а другой соединяется с лотком 202 среднего уровня; в точках крепления на двух концах подъемника среднего уровня 302 один конец соединяется с лотком 202 среднего уровня, а другой соединяется с лотком 203 верхнего уровня; в точках крепления на двух концах подъемника верхнего уровня 303 один конец соединяется с лотком 203 верхнего уровня, а другой соединяется кузовом 11.
Как показано на Фиг. 6, система управления 4 содержит главную панель 41 управления, модуль 42 автоматического управления, навигационный модуль 43, модуль 44 электрогидравлического управления и модуль 45 управления движением; система управления 4 установлена на корпусе 1 транспортного средства, а модуль 42 автоматического управления, навигационный модуль 43, модуль 44 электрогидравлического управления и модуль 45 управления движением соответственно электрически соединены с главной панелью 41 управления для осуществления управлением различными функциями; модуль 42 автоматического управления и навигационный модуль 43 подключены к водительской стойке 16 для выполнения управления пуском и остановом, управления торможением, позиционированием, навигацией по траектории движения и вождением многофункционального средства транспортировки грузов; модуль электрогидравлического управления 44 электрически соединен с гидронасосом 15 и подъемником для осуществления управления подъемом программируемого многоуровневого подъемника; модуль 45 управления движением электрически соединен с двигателем 23, чтобы обеспечить возможность загрузки и разгрузки грузов с каждого уровня лотка 21 на грузовое средство или место хранения груза при совместном действии двигателя 23, ведущего вала 24 и направляющего ролика 25; подъем или опускание каждого уровня лотка 21 управляется таким образом, чтобы осуществить управление загрузкой или разгрузкой груза многоуровневого лотка 21.
Последовательность операций по загрузке и транспортировке грузов с помощью многофункционального средства транспортировки грузов в месте сортировки багажа в аэропорту следующая: во-первых, груз поступает в желоб для перемещения грузов с углом наклона по горизонтали от 3° до 10° левого лотка 211 лотка 203 верхнего уровня до заполнения желоба, и грузы прислоняются к левой стороне; во-вторых, грузы поступают в желоб для перемещения грузов с углом наклона по горизонтали от -3° до -10° левого лотка 211 до заполнения желоба, и грузы прислоняются к правой стороне; в-третьих, грузы поступают в желоб для перемещения грузов с углом наклона по горизонтали 0° среднего лотка 212 до заполнения желоба; грузы перенаправляются в желоб для перемещения грузов с углами наклона по горизонтали от -3° до -10° и от 3° до 10° правого лотка 213 до заполнения желоба, и грузы прислоняются к правой и левой стороне соответственно. После подъема полностью загруженного лотка 203 верхнего уровня, аналогичным образом грузы поступают на пустой лоток 202 среднего уровня до заполнения лотка; после подъема полностью загруженного лотка 202 среднего уровня, аналогичным образом грузы поступают на пустой лоток 201 нижнего уровня до заполнения лотка.
Наполненное грузами многофункциональное средство транспортировки грузов перевозит грузы из места сортировки багажа в аэропорту, подъезжает к грузовому отсеку воздушного судна на стояночной площадке и разгружает грузы. Последовательность действий следующая: во-первых, загруженный лоток 203 верхнего уровня устанавливается на одном уровне с дверью грузового отсека воздушного судна, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в грузовой отсек воздушного судна, и разгруженный лоток 203 верхнего уровня поднимается выше уровня двери грузового отсека воздушного судна; во-вторых, загруженный лоток 202 среднего уровня поднимается до уровня двери грузового отсека воздушного судна, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в грузовой отсек воздушного судна, и разгруженный лоток 202 среднего уровня поднимается выше уровня двери грузового отсека воздушного судна, образуя стопку вместе с лотком 203 верхнего уровня; затем загруженный лоток 201 нижнего уровня поднимается до уровня двери грузового отсека воздушного судна, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в грузовой отсек воздушного судна, и разгруженный лоток 201 нижнего уровня опускается до кузова 11; наконец, лоток 202 среднего уровня опускается и располагается в стопке над лотком 201 нижнего уровня, а лоток 203 верхнего уровня опускается и располагается в стопке над лотком 202 среднего уровня.
Возможен вариант конструкции, в котором последовательность действий при загрузке многофункционального средства транспортировки грузов с трехуровневым грузовым лотком 21, когда пустое транспортное средство подъезжает к двери грузового отсека воздушного судна на стояночной площадке, следующая: во-первых, лоток 203 верхнего уровня и лоток 202 среднего уровня поднимаются и находятся выше уровня двери грузового отсека самолета; во-вторых, лоток 201 нижнего уровня устанавливается на уровне двери грузового отсека самолета, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза из грузового отсека воздушного судна и подача в лоток 201 нижнего уровня, и полностью загруженный лоток 201 нижнего уровня опускается с грузами до кузова 11; в-третьих, лоток 202 среднего уровня опускается до уровня двери грузового отсека воздушного судна, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза из грузового отсека самолета в лоток 202 среднего уровня, и полностью загруженный лоток 202 среднего уровня опускается над лотком нижнего уровня 201; наконец, лоток 203 верхнего уровня опускается до уровня двери грузового отсека воздушного судна, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза из грузового отсека самолета в лоток 203 верхнего уровня до заполнения лотка.
Последовательность операций при разгрузке полностью загруженного грузами многофункционального средства транспортировки грузов, которое перевозит грузы от грузового отсека воздушного судна на стояночной площадке и приезжает в место сортировки багажа в аэропорту, следующая: во-первых, загруженный лоток 201 нижнего уровня устанавливается на уровне машины для сортировки багажа в аэропорту, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в сортировочную машину, и разгруженный лоток 201 нижнего уровня опускается до кузова 11; во-вторых, загруженный лоток 202 среднего уровня устанавливается на уровне машины для сортировки багажа в аэропорту, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в сортировочную машину, и разгруженный лоток 202 среднего уровня опускается над лотком 201 нижнего уровня; наконец, загруженный лоток 203 верхнего уровня устанавливается на уровне машины для сортировки багажа в аэропорту, двигатель 23 приводит в движение ведущий вал 24 и направляющий ролик 25 для выталкивания груза в сортировочную машину, и разгруженный лоток 203 верхнего уровня опускается над лотком 202 среднего уровня.
Данное выше описание представляет только предпочтительные варианты осуществления данного изобретения и не ограничивает настоящее изобретение. Любые изменения, эквивалентные замены и улучшения, выполненные в рамках идеи или основного объема данного изобретения должны быть включены в объем данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАЗМЕЩЕНИЯ БАГАЖА | 2006 |
|
RU2432308C2 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 2008 |
|
RU2500553C2 |
| СИСТЕМА АДМИНИСТРИРОВАНИЯ БАГАЖА И СПОСОБ АДМИНИСТРИРОВАНИЯ БАГАЖА | 2018 |
|
RU2720930C1 |
| Подъемник для грузов | 1982 |
|
SU1049399A1 |
| МОДУЛЬНЫЙ БРОНЕАВТОМОБИЛЬ | 2022 |
|
RU2801086C1 |
| Универсальный автоматизированный погрузочно-разгрузочный модуль Шумовского | 2019 |
|
RU2721809C1 |
| СИСТЕМА И СПОСОБ ЗАДАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ ДЛЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПУНКТА ПОДГОТОВКИ | 2016 |
|
RU2689597C2 |
| СИСТЕМА ДЛЯ ПОГРУЗКИ НЕУПАКОВАННОГО ГРУЗА В ГРУЗОВОЙ ОТСЕК САМОЛЕТА И ВЫГРУЗКИ НЕУПАКОВАННОГО ГРУЗА ИЗ ГРУЗОВОГО ОТСЕКА САМОЛЕТА И ИСПОЛЬЗУЕМЫЕ ДЛЯ ЭТОГО СРЕДСТВО ПРОМЕЖУТОЧНОГО КОНВЕЙЕРА И БЛОК КОНВЕЙЕРА | 2003 |
|
RU2312044C2 |
| Малогабаритное модульное транспортное средство | 2016 |
|
RU2657829C2 |
| Подъемник | 1982 |
|
SU1119958A1 |

Изобретение относится к области транспортировки грузов в аэропортах, вокзалах, складах, грузовых дворах, верфях и других местах между местом хранения и грузовым средством. Многофункциональное средство транспортировки грузов включает в себя корпус (1) транспортного средства, расположенный внизу для формирования основы и опоры, раму (2) подачи грузов, расположенную над корпусом (1) транспортного средства и содержащую множество уровней для загрузки и разгрузки грузов, подъемный механизм (3), расположенный с внешней стороны рамы (2) подачи грузов для подъема рамы (2) подачи грузов, и систему управления (4), расположенную на корпусе (1) транспортного средства для управления движением во всех направлениях, точной стыковки, автоматической загрузки и разгрузки многофункционального средства транспортировки грузов. Способ транспортировки грузов при помощи многофункционального средства транспортировки грузов заключается в том, что грузы в разных рядах двигаются плавно в процессе погрузки и разгрузки, при этом многоуровневый лоток способен складываться в стопку, когда груз отсутствует, и раскладываться при наличии груза. Под действием системы управления (4) подъемный механизм (3) транспортирует груз из многофункционального средства транспортировки грузов на грузовое средство или из грузового средства в многофункциональное средство транспортировки грузов. Многофункциональное средство транспортировки грузов обеспечивает одновременное выполнение многозадачных функций загрузки и разгрузки, транспортировки и передачи грузов, эффективно осуществляя процесс транспортировки грузов от места хранения до грузового средства. 2 н. и 8 з.п. ф-лы, 6 ил.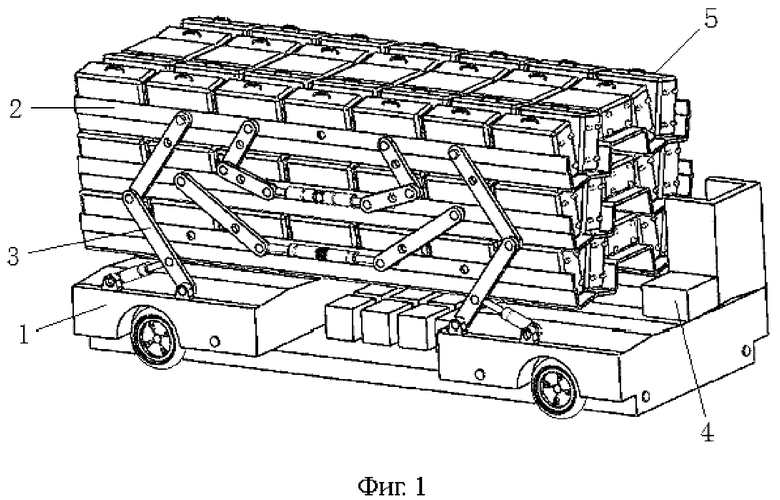
1. Многофункциональное средство транспортировки грузов, включающее в себя
корпус (1) транспортного средства,
раму (2) подачи грузов,
подъемный механизм (3),
систему управления (4),
отличающееся тем, что корпус (1) транспортного средства расположен в нижней части для формирования основы и опоры;
рама (2) подачи грузов расположена над корпусом (1) транспортного средства и содержит множество уровней для загрузки и разгрузки груза (5);
подъемный механизм (3) служит для поднятия рамы (2) подачи грузов;
система управления (4) расположена на корпусе (1) транспортного средства для управления автоматической погрузкой и разгрузкой груза (5), движения во всех направлениях и точной стыковки многофункционального средства транспортировки грузов;
рама (2) подачи грузов включает в себя лоток (21), защитный барьер (22), двигатель (23), ведущий вал (24) и направляющий ролик (25), причем двигатель (23), ведущий вал (24), направляющий ролик (25) расположены внутри лотка (21), а ведущий вал (24) приводит во вращательное движение направляющий ролик (25) под действием двигателя (23), чтобы заставить груз перемещаться;
низ лотка (21) соединен с подъемным механизмом (3) и вертикальное и горизонтальное движение лотка (21) осуществляется под воздействием подъемного механизма (3);
защитный барьер (22) устанавливается сбоку, сзади, слева и справа лотка (21) для предотвращения выпадения груза, и передний защитный барьер имеет подвижное соединение, чтобы в момент, когда груз перемещается на лоток (21) или с него, передний защитный барьер менял свое положение из вертикального в горизонтальное, таким образом, облегчая загрузку и разгрузку грузов.
2. Многофункциональное средство транспортировки грузов по п. 1, отличающееся тем, что лоток (21) имеет левый лоток (211), центральный лоток (212) и правый лоток (213) вдоль трех направлений слева, по центру и справа транспортного средства соответственно;
двигатель (23) - это управляющий двигатель, включающий в себя шаговый двигатель, сервопривод, двигатель с регулируемой частотой и реализующий программное управление состоянием движения;
ведущий вал (24) подсоединен к двигателю (23) через редуктор скорости и подсоединен к направляющему ролику (25) с помощью штифта;
направляющий ролик (25) имеет форму усеченного конуса с круглым поперечным сечением с двумя узкими концами и толстой серединой, поверхность имеет противоскользящую полосу.
3. Многофункциональное средство транспортировки грузов по п. 1 или 2, отличающееся тем, что рама (2) подачи грузов включает себя многоуровневый лоток (21) для размещения множества грузов;
левый лоток (211) каждого из лотков (21) имеет два ряда желобов для перемещения грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°, центральный лоток (212) имеет желоб подачи грузов с углом наклона по горизонтали 0°, а правый лоток (213) имеет два ряда желобов подачи грузов с углами наклона по горизонтали от 3° до 10° и от -3° до -10°.
4. Многофункциональное средство транспортировки грузов по п. 1 или 2, отличающееся тем, что подъемный механизм (3) выполнен в виде многоуровневого подъемника, количество уровней подъемника соответствует количеству уровней рамы (2) подачи грузов;
каждый уровень подъемника имеет соединительную штангу (311), установочный штифт (312) и гидроцилиндр (313), при этом множество соединительных штанг (311) соединяются друг с другом с помощью установочных штифтов (312), а гидроцилиндр (313) устанавливается между лотком (21) и соединительной штангой (311);
начиная с подъемника нижнего уровня, в точках крепления на двух концах подъемника каждого уровня один конец соединяется с лотком того же уровня, а другой конец соединяется с лотком предыдущего уровня;
в точках крепления на двух концах подъемника верхнего уровня один конец соединяется с лотком верхнего уровня, а другой соединяется кузовом (11).
5. Многофункциональное средство транспортировки грузов по п. 1, отличающееся тем, что корпус (1) транспортного средства имеет кузов (11), поворотное колесо (12), блок аккумуляторов (13), датчик (14), гидронасос (15) и водительскую стойку (16);
поворотное колесо (12) закреплено в нижней части кузова (11) для осуществления функций вождения транспортным средством во всех направлениях и точной остановки;
блок аккумуляторов (13) располагается на кузове (11) и обеспечивает электропитание для создания тяговой мощности транспортного средства и обеспечения подачи и подъема грузов;
датчик (14) располагается в нижней части на периметре кузова (11) для обеспечения функций определения препятствий, позиционирования и навигации;
гидронасос (15) располагается на кузове (11) для приведения в движение рамы (2) подачи грузов для осуществления подъемного движения;
водительская стойка (16) располагается в передней части корпуса (1) транспортного средства для вождения человеком или автоматически.
6. Многофункциональное средство транспортировки грузов по п. 1, отличающееся тем, что подъемный механизм (3) расположен на внешней стороне рамы (2) подачи грузов.
7. Многофункциональное средство транспортировки грузов по одному из пп. 1-6, отличающееся тем, что система управления (4) содержит главную панель (41) управления, модуль (42) автоматического управления, навигационный модуль (43), модуль (44) электрогидравлического управления и модуль (45) управления движением;
модуль (42) автоматического управления, навигационный модуль (43), модуль электрогидравлического управления (44) и модуль (45) управления движением соответственно электрически соединены с главной панелью (41) управления для осуществления управления различными функциями;
модуль (42) автоматического управления и навигационный модуль (43) используются для осуществления управления вождением во всех направлениях, управления торможением, позиционированием и навигацией по траектории движения многофункционального средства транспортировки грузов;
модуль (44) электрогидравлического управления служит для осуществления управления подъемом подъемного механизма (3);
модуль (45) управления движением используется для управления движением многофункционального средства транспортировки грузов и загрузкой и разгрузкой грузов.
8. Способ транспортировки грузов при помощи многофункционального средства транспортировки грузов по любому из пп. 1-6, отличающийся тем, что многофункциональное средство транспортировки грузов объединяет в себе множество транспортных средств с различными функциями как одно транспортное средство и в то же время осуществляет многозадачные функции по загрузке и разгрузке, перевозке и подаче грузов, таким образом эффективно осуществляя процесс транспортировки грузов между местом хранения и грузовым средством;
грузы в разных рядах двигаются плавно в процессе погрузки и разгрузки, при этом многоуровневый лоток способен складываться в стопку, когда груз отсутствует, и раскладываться при наличии груза;
подъем многоуровневого подъемника управляется независимо; подъемник приводится в действие гидравлически, пневматически, электрически или сочетанием этих трех способов;
система управления и многофункциональное средство транспортировки грузов, направляемое при помощи поворотного колеса, осуществляют движение вперед, назад, влево, вправо, выполняют поворот, разворот и другие движения, а также автономную навигацию и автоматическое управление движением в малом диапазоне расстояния.
9. Способ транспортировки грузов по п. 8, отличающийся тем, что под действием системы управления (4) подъемный механизм (3) транспортирует груз из многофункционального средства транспортировки грузов на грузовое средство;
во-первых, лоток (203) верхнего уровня поднимается или опускается до уровня двери кабины грузового средства, груз поступает в грузовое средство и после разгрузки лоток (203) верхнего уровня поднимается и становится выше уровня двери кабины грузового средства;
во-вторых, лоток (202) среднего уровня поднимается до уровня двери кабины грузового средства, груз поступает в грузовое средство и после разгрузки лоток (202) среднего уровня поднимается и становится выше уровня двери кабины грузового средства и образует стопку вместе с лотком (203) верхнего уровня;
затем лоток (201) нижнего уровня поднимается до уровня двери кабины грузового средства, груз поступает в грузовое средство и после разгрузки лоток (201) нижнего уровня опускается к кузову (11);
наконец, лоток (202) среднего уровня опускается и располагается в стопке над лотком (201) нижнего уровня, а лоток (203) верхнего уровня опускается и располагается в стопке над лотком (202) среднего уровня.
10. Способ транспортировки грузов по п. 8, отличающийся тем, что под действием системы управления (4) подъемный механизм (3) транспортирует груз из грузового средства в многофункциональное средство транспортировки грузов;
во-первых, трехуровневый лоток (21), сложенный в стопку, поднимается, лоток (203) верхнего уровня и лоток (202) среднего уровня оказываются выше двери кабины грузового средства и лоток (201) нижнего уровня достигает уровня двери кабины грузового средства;
во-вторых, груз поступает на лоток (201) нижнего уровня и после загрузки лоток (201) нижнего уровня опускается до кузова (11);
затем лоток (202) среднего уровня опускается до уровня двери кабины грузового средства, груз поступает в лоток (202) среднего уровня и после загрузки лоток (202) среднего уровня опускается до положения над лотком (201) нижнего уровня, полностью заполненного грузом;
наконец, лоток (203) верхнего уровня опускается до уровня двери грузового средства, груз поступает в лоток (203) верхнего уровня и после загрузки лоток (203) верхнего уровня опускается до положения над лотком (202) среднего уровня, полностью заполненного грузом.
| CN 107709163 A, 16.02.2018 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИМЕРНОЙ ПРЕСС-КОМПОЗИЦИИ | 2011 |
|
RU2463314C1 |
| CN 104192319 B, 15.06.2016 | |||
| 0 |
|
SU174140A1 | |
| Тележка | 1983 |
|
SU1171414A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 207120684 U, 20.03.2018 | |||
| CN 103568918 B, 01.06.2016 | |||
| US 5630694 A1, 20.05.1997 | |||
| US 10449886 A1, 31.05.2018. | |||

