Область техники
Изобретение относится к области ремонта, а точнее к устройствам для реализации монтажа и демонтажа дверей вагонов и их перемещения по сервисному депо. Установка сокращает время и трудозатраты на снятие и установку дверей пассажирских вагонов, поездов и локомотивов.
Уровень техники
Известна установка для перемещения тяжелых грузов (патент РФ 2200123 C1, опубликовано: 10.03.2003 Бюл. №7), которая включает в себя установку, содержащую платформу, выносные опоры с гидроприводом, установленную на платформе поворотную колонну, коленчато-телескопическую стрелу, связанную с поворотной колонной посредством оси и состоящую из шарнирно связанных основания неизменяемой длины и раздвижной консольной части, раздвижная консольная часть стрелы образована корпусом и двумя телескопическими выдвижными секциями, ось вращения поворотной колонны размещена на 67-80% длины платформы от ее передней кромки.
Недостатком ближайшего аналога является его функциональная ограниченность (ограниченная зона действия крана), заключающаяся в том, что возможно его использование только для подъема груза, при этом невозможна работа, когда стрела должна располагаться параллельно поверхности земли. Предлагаемый кран может использоваться для работ по реконструкции и монтажу малоэтажных зданий, в нашем случае его размеры и габариты не подходят для нашей платформы, а также его размеры не позволяют использовать кран внутри цеха.
Известно изобретение (патент РФ 2479481 С1, опубликовано: 20.04.2013 Бюл. №11) относящиеся к грузоподъемным устройствам, а именно к механизмам поворота с гидравлическим приводом. Механизм поворота стрелового манипулятора содержит поворотную колонну с закрепленной на ней шестерней, зубчатую рейку, размещенную внутри гидроцилиндров, в поршни которых встроены демпфирующие устройства, а в крышках гидроцилиндров выполнены каналы, сообщающиеся с распределителем гидросистемы базовой машины и с полостями дополнительного демпфера.
Его недостаток заключается в том, что при установке демпфера на другие манипуляторы с различными объемами полостей гидроцилиндра и объемами деформации цилиндрических элементов гидросистемы не предусмотрена регулировка объемов полостей демпфера, что необходимо для эффективности демпфирования, а также габариты не подходят для нашей платформы, и его размеры не позволяют использовать механизм внутри платформы.
Известно изобретение (патент РФ 2667441 С2, опубликовано: 19.09.2018 Бюл. №26) относящееся к магнитному крепежному узлу. Узел включает несущий элемент, имеющий установочный штифт и корпус, включающий гнездо магнита с конической нижней стенкой и наружной периферийной стенкой. Чашка магнита принимается в пределах периферийной стенки, перекрывая коническую нижнюю стенку. Кроме того, магнит удерживается в чашке магнита.
Недостатком данного устройство является необходимость в применении большого количества датчиков и программ, которые бы обеспечивали правильную корректировку работы всех систем и работа которых невозможна без использования источников электроэнергии.
Настоящее изобретение относится к вакуумной присоске и направлено на повышение плавности работы. Вакуумная присоска включает крышку, присасывающую пластинку, внутреннюю пластинку и элемент регулировки высоты. Крышка закреплена с возможностью поворота на верхней части вакуумной присоски и содержит множество крепежных элементов, находящихся на внутренней верхней поверхности, и множество замыкающих выступов.
Недостатком данного устройство является то, что суммарная эффективность каждого компонента может ослабевать, и соединенные компоненты могут расшатываться и сдвигаться, то есть они могут недостаточно плотно соединяться между собой, что станет причиной нарушения их функционирования.
Предложена конструкция (Патент РФ 180468 U1, опубликовано: 14.06.2018 Бюл. №17) рулевого рычажного механизма для колесного транспортного средства, содержащего: рулевой механизм закрепленный на раме и соединенный с сошкой, который с помощью продольной и поперечной тяг соединен с поворотными рычагами первого моста, промежуточную тягу, соединяющую сошку рулевого механизма с рычагом, подвижно установленным на промежуточной опоре, связанной с силовым гидроцилиндром и соединенной продольным и поперечными тягами с поворотными рычагами второго моста. Рулевой механизм дополнительно снабжен маятниковыми рычагами, закрепленными на мостах, поперечные тяги выполнены разрезными с возможностью присоединения к маятниковым рычагам. Кроме этого, рулевой механизм с сошкой, промежуточная опора и продольные тяги выполнены с возможностью расположения внутри рамы транспортного средства.
Недостатком этой конструкции является наличие большого числа передаточных звеньев и отдельного распределителя рулевого механизма, наличие золотникового распределителя. Все это приводит к усложнению конструкции рулевого механизма, большому люфту в приводе и неудовлетворительной точности управления.
Известно изобретение (патент РФ 2728851 С1, опубликовано: 31.07.2020 Бюл. №22) относящееся к подъемно-транспортным машинам для перемещения шарнирно-подвешенных грузов в вертикальной плоскости и может найти применение в автоматических линиях и роботах-манипуляторах, преимущественно для безопасного подъема и опускания хрупких, тонкостенных и взрывоопасных грузов. Грузоподъемный манипулятор содержит установленное на опорной стойке шарнирно-рычажное устройство для перемещения подвешенного груза, соединенного с шарнирным подвесом крюка. Шарнирно-рычажное устройство выполнено в виде двух установленных один внутри другого и подпружиненных между собой четырехзвенных шарнирных механизмов. Звенья одного из шарнирных механизмов установлены на опорной стойке, а звенья другого шарнирного механизма связаны с опорной стойкой посредством упругого элемента и поворотного двух плечевого рычага, сблокированного с параллелограммным механизмом с установленной на его шатуне подвижной платформой приема опускаемого подвешенного груза. Достигается повышение безопасности работы за счет плавного подъема и опускания подвешенного груза точно по вертикали без его раскачивания и без жестких ударов груза в конце его опускания, а также упрощение конструкции, исключающей свободное падение подвешенного груза с высоты при отказе привода манипулятора.
Недостатками известного грузоподъемного манипулятора являются:
1. Подъем и опускание груза происходят с большими отклонениями от вертикали (с амплитудой более 1 метра), что приводит к раскачке с колебаниями груза и может вызвать аварийный обрыв строп и падение груза с высоты.
2. В конце опускания при посадке и полной остановке движущегося груза происходят жесткие динамические удары переносимого груза об опорную поверхность, которые возникают как из-за раскачки при перемещении груза, так и от снижения скорости движения груза до нуля за счет его удара о неподвижную опорную поверхность, что недопустимо при перемещении хрупких (например, стекло), тонкостенных (например, яйцо) и взрывоопасных (например, боеприпасы) предметов, а также емкостей с опасными жидкостями (радиоактивные отходы, кислоты, расплавленный металл и ядовитые вещества).
Раскрытие изобретения
Сущность предполагаемой установки заключается в упрощенной реализации монтажа и демонтажа дверей вагонов и их перемещение по сервисному депо. Данная установка состоит из: платформы, которая перемещается за счет силовой установки (двух колесных пар) в движение колесные пары приводит электродвигатель; колесная пара осуществляет поворот за счет рулевой тяги приводимой в движение электродвигателем; стрела подъемного крана состоит из двух сетчатых рычагов, соединенных шарниром с поворотным основанием, приводящихся в движение электродвигателем, работающая за счет гидроцилиндра; механизм захвата состоит из электромагнита и вакуумных присосок.
Технический результат данной установки заключается в ускоренной реализации монтажа и демонтажа дверей вагонов и их перемещение сервисному депо. Установка сокращает время и трудозатраты на снятие и установку дверей пассажирских вагонов, поездов и локомотивов.
Краткое описание чертежей
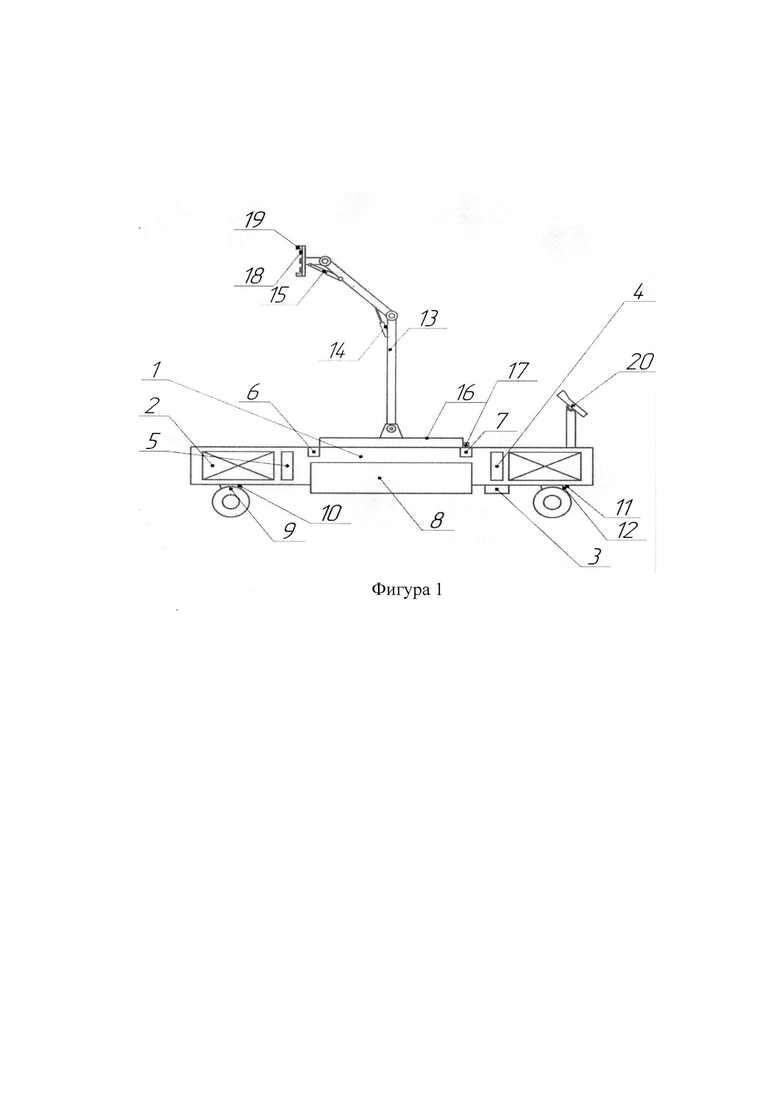
На фигуре 1 представлена схема установки для монтажа и демонтажа дверей вагонов
1 - Платформа;
2 - Аккумуляторная батарея;
3 - Электронный блок управления;
4 - Гидронасос;
5 - Вакуумный насос;
6 - Компрессор воздушный;
7 - Ресивер;
8 - Электродвигатель;
9 - Колесная пара;
10 - Поворотный механизм;
11 - Приводной вал;
12 - Переходная муфта;
13 - Стрела;
14 - Гидроцилиндр;
15 - Гидравлическое масло;
16 - Поворотная плита;
17 - Коробка отбора мощности;
18 - Электромагнит;
19 - Вакуумные присоски;
20 - Контроллер управления.
Осуществление изобретения
Установка для монтажа и демонтажа работает следующим образом: Платформа 1 состоит из жесткой конструкции металлических профилей, на котором установлены два аккумуляторных блока 2, электронный блок управления 3, на который подается сигнал с контролера управления 20. С электронного блока управления 3, подается сигнал на гидронасос 4, вакуумный насос 5, компрессор воздушный 6, ресивер 7, электродвигатель 8. Движение платформы 1 приводится в работу с помощью электродвигателя 8, который присоединен к двум колесным парам 9, жестко закрепленным к поворотному механизму 10 и приводятся в движение с помощью приводных валов 11, а на конце приводных валов 11 установлена переходная муфта 12. Все эти механизмы приводятся во вращение с помощью электродвигателя 8.
Стрела 13, которая расположена на поворотной плите 16, приводимой в движение за счет электродвигателя 8, который жестко закреплен с коробкой отбора мощности 17, представляет собой два решетчатых рычага, соединенных шарниром и приводимых в движение гидроцилиндром 14, работающим за счет давления гидравлического масла 15, нагнетаемого гидронасосом 4, с номинальным давлением 16 МПа.
Механизм захвата выполнен из электромагнита 18 и вакуумных присосок 19 работающих независимо друг от друга, на электромагнит подается электрический ток, вызывающий появление магнитного поля, которое удерживает металлическую дверь на стреле 13 съемника. Вакуумные присоски 19 работающие за счет отрицательного давления воздуха создаваемого с помощью вакуумного насоса 5, за счет этого создается удерживающая сила между дверью и присосками, которая дополнительно удерживает дверь.
Действие установки заключается в ускоренном монтаже и демонтаже, которая работает следующим образом: Оператор управляет установкой при помощи пульта управления, который посылает сигнал на электронный блок управления. С блока управления подается сигнал на электродвигатель, который приводит в движение колесную пару через переходную муфту с помощью приводных валов. Поворот колесных пар осуществляется за счет рулевого управления, через рулевые тяги, соединенные с рулевой рейкой и приводимой в движение за счет электродвигателя. С помощью коробки отбора мощности (КОМ) крутящий момент передается на гидронасос, создающий давление гидравлического масла в 16 МПа обеспечивающее работу гидроцилиндров всей установки. Вакуумный насос, работающий за счет собственного электродвигателя, создает отрицательное давление для работы вакуумных присосок механизма захвата. Компрессор воздушный работающий за счет собственного электродвигателя создает избыточное давление воздуха, накопляемого в ресивере, который нужен для работы ручного пневматического инструмента для помощи в демонтаже двери. Поворотный механизм, вращающий стрелу, осуществляет движение за счет зубчатого колеса, вращаемого электродвигателем.
Список литературы
1. Иванов В.И. Объемные гидромашины и гидропередачи. М.: ИЦ МГТУ «Станкин», 2006.
2. Домогаров А.Ю., Степанов А.И., Леладзе И.С. Рабочие жидкости и смазки. М: МАДИ (ГТУ), 2005.
3. Башта Т.М., Руднев С.С., Некрасов Б.Б. и др. Гидравлика, гидромашины и гидроприводы: Учебник для машиностроительных вузов. 2-е изд., перераб. М.: Машиностроение, 1982.
4. Герц Е.В. и др. Пневматические устройства и системы в машиностроении
5. Бурлаков О.А., Литвинов В.Н. Инженерный расчет при разработке пневмо- и гидроприводов.
6. Данилин Б.С. Минайчев В.Е. Основы конструирования вакуумных систем.
7. Фролов Е.С. и др. Вакуумные системы и их элементы.
8. Акимов Е.Г. Выбор асинхронных двигателей общего назначения.
9. Антипов В.Н. и др. Двигатели постоянного тока в современном электроприводе.
10. Проскуряков В.Б. Динамика и прочность рам и корпусов транспортных машин.
11. Егоров М.Е. (1976) Технология машиностроения. Учебник для втузов.
12. Базров, Б.М. Основы технологии машиностроения: Уч. / Б.М. Базров. - М.: Инфра-М, 2019. - 492 с.
13. Зубарев, Ю.М. Динамические процессы в технологии машиностроения. Основы конструирования машин: Учебное пособие / Ю.М. Зубарев. - СПб.: Лань, 2018. - 212 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Шахтная самоходная машина | 2023 |
|
RU2825778C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
Изобретение относится к устройствам для реализации монтажа и демонтажа дверей вагонов и их перемещения по сервисному депо. Устройство содержит платформу, которая перемещается за счет силовой установки, колесные пары с приводом от электродвигателя, рулевую тягу, приводимую в движение электродвигателем. Стрела подъемного крана установлена на платформе и состоит из двух сетчатых рычагов, соединенных шарниром с поворотным основанием, приводящихся в движение электродвигателем, работающая за счет гидроцилиндра. Механизм захвата состоит из электромагнита и вакуумных присосок. Достигается возможность упрощённой работы устройства для ремонта вагонов. 1 ил.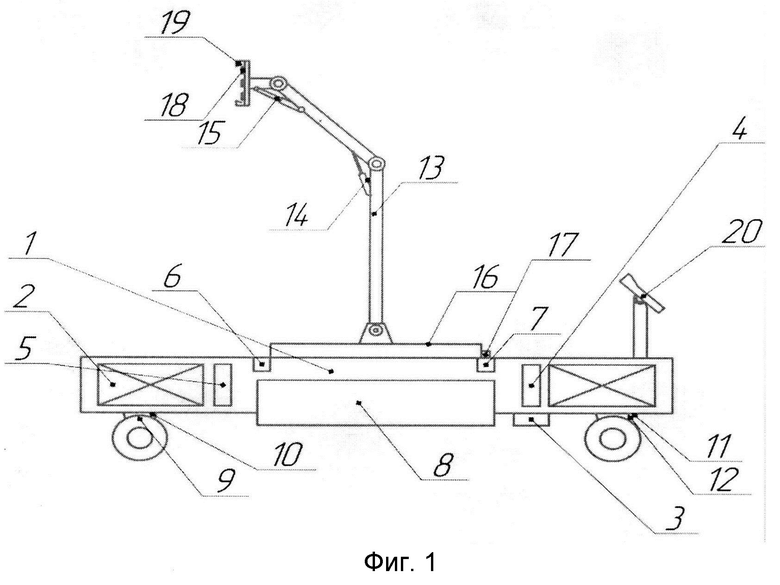
Мобильное устройство для монтажа и демонтажа вагонных дверей, состоящее из платформы, двух колесных пар, электродвигателя, рулевой тяги, стрелы подъемного крана, установленной на поворотном основании, отличающееся тем, что стрела выполнена в виде двух решетчатых рычагов, соединенных шарниром, приводимых в действие гидроцилиндром, механизм захвата установлен на стреле и выполнен из электромагнита и вакуумных присосок, работающих независимо друг от друга, при этом устройство содержит блок управления с возможностью управления с помощью пульта управления
| EP 3456601 B1, 13.05.2020 | |||
| Балансирный механизм | 1961 |
|
SU144273A1 |
| WO 2011036642 A1, 31.03.2011 | |||
| МОБИЛЬНАЯ УСТАНОВКА ПРАВКИ И ЗАМЕНЫ ЛЮКОВ ПОЛУВАГОНОВ | 2008 |
|
RU2384432C2 |

