Область техники, к которой относится изобретение
Изобретение относится к горной технике, в частности к шахтным самоходным машинам.
Уровень техники
Известен рулевой рычажный механизм для колесного транспортного средства (патент РФ №180468), содержащий рулевой механизм, закрепленный на раме и соединенный с сошкой, который с помощью продольной и поперечной тяг соединен с поворотными рычагами первого моста, промежуточную тягу, соединяющую сошку рулевого механизма с рычагом, подвижно установленным на промежуточной опоре, связанной с силовым гидроцилиндром и соединенной продольным и поперечными тягами с поворотными рычагами второго моста, дополнительно снабжен маятниковыми рычагами, закрепленными на мостах, поперечные тяги выполнены разрезными с возможностью присоединения к маятниковым рычагам, кроме этого, рулевой механизм с сошкой, промежуточная опора и продольные тяги выполнены с возможностью расположения внутри рамы транспортного средства. Недостатком аналога является большое количество рулевых тяг и соответственно большое количество шарниров в местах их соединений между собой, а также с маятниковыми рычагами и рулевой сошкой, что в процессе работы приводит к появлению зазоров и люфтов влияющих на точность управления машиной. Кроме того для снижения усилий на рулевой сошке при повороте колес данный рычажный механизм требует дополнительного оснащения вспомогательным силовым гидроцилиндром.
Также известен рулевой привод транспортного средства с двумя управляемыми мостами (авторское свидетельство СССР №1281466), содержащий два трехплечих рычага, которые соединены между собой зубчатой передачей и установлены на качалке. Рычаги соединены тягами с поворотными узлами колес и могут фиксироваться в нейтральном положении относительно качалки одной парой гидроцилиндров фиксации, а качалка может фиксироваться относительно корпуса другой парой. Управление колесами осуществляется с помощью гидроцилиндра рулевого управления, гидравлически соединенного с гидрораспределителем рулевого управления, гидрораспределителем управления гидроцилиндрами фиксации, гидронасосом и гидробаком. Устройство принято за прототип.
Недостатками прототипа является сложность конструкции обусловленная наличием большого количества гидравлических устройств необходимых для синхронизации поворота управляемых колес переднего и заднего мостов.
Сущность изобретения
Техническим результатом заявляемого изобретения является повышение надежности и точности маневрирования при движении шахтной самоходной машины.
Указанный технический результат достигается тем, что шахтная самоходная машина содержит
- ходовую часть с рамой, по меньшей мере, первую пару движителей, вторую пару движителей, механизмы управления поворотом упомянутых первой и второй пары движителей;
- каждый из упомянутых движителей выполнен в виде мотор-колеса;
- первая пара упомянутых мотор-колес установлена с возможностью поворота вокруг вертикальной оси в неподвижных опорах на упомянутой раме, вторая пара упомянутых мотор колес установлена с возможностью поворота вокруг вертикальной оси в опорах на балке, которая соединена с упомянутой рамой с возможностью качания вокруг горизонтальной оси симметрии машины;
- каждый упомянутый механизм управления включает трехплечевой рычаг, гидроцилиндр, связывающий раму с первым плечом упомянутого трехплечевого рычага, рулевые тяги, связывающие каждый движитель со вторым плечом упомянутого трехплечевого рычага, при этом третьи плечи трехплечевых рычагов механически соединены друг с другом.
Машина может содержать продольную тягу, соединяющую третье плечо трехплечевого рычага одного механизма управления, с третьим плечом трехплечевого рычага второго механизма управления.
Механизмы управления поворотом пар колес могут быть выполнены выполнены симметричными относительно поперечной оси машины.
Механизмы управления поворотом пар колес могут быть выполнены кососимметричными относительно центра машины.
Каждый движитель может содержать поворотный кулак, выполненный за одно целое с корпусом движителя.
Описание чертежей
Сущность изобретения поясняется приложенными чертежами:
Фиг. 1 - Шахтная самоходная машина. Общий вид;
Фиг. 2 - Шахтная самоходная машина. Вид снизу;
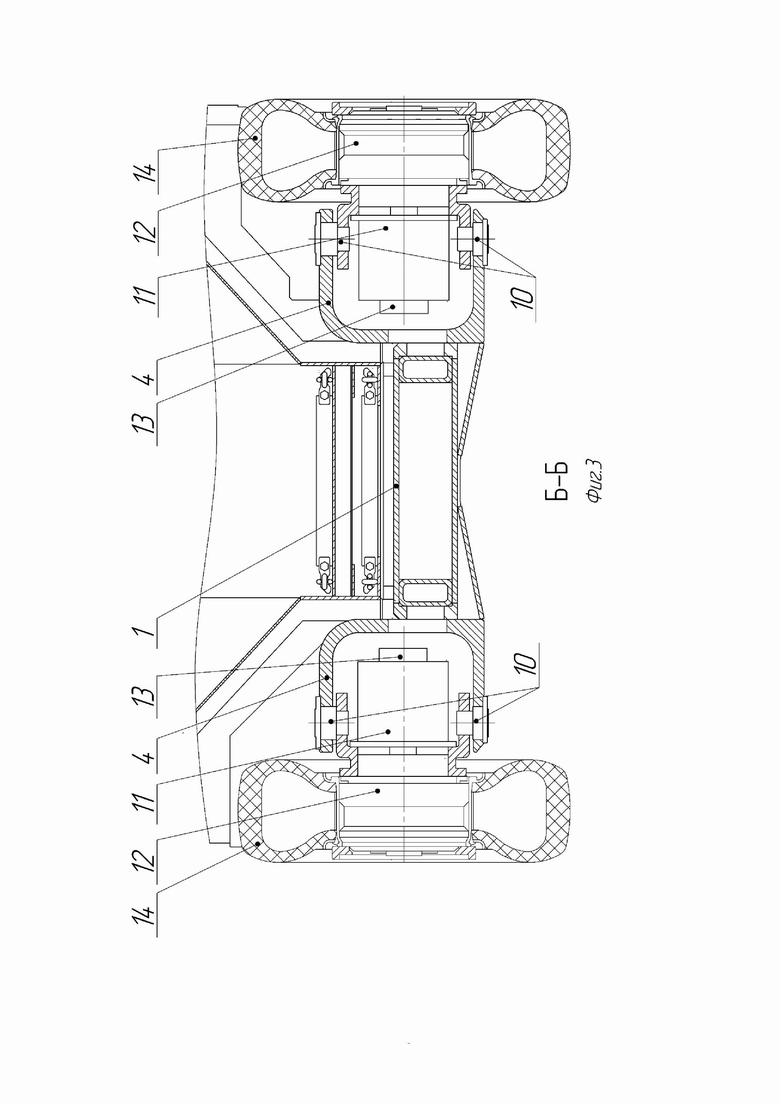
Фиг. 3-Разрез Б-Б. Неподвижные опоры на раме;
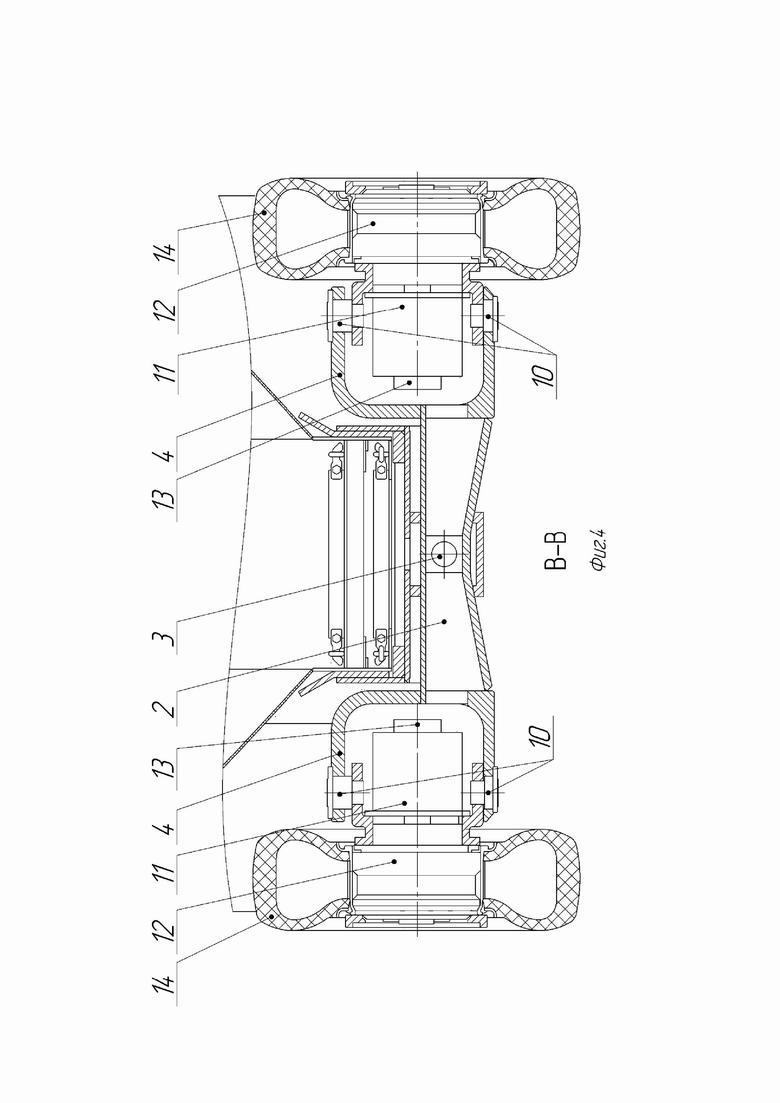
Фиг. 4 - Разрез В-В. Неподвижные опоры на качающейся балке;
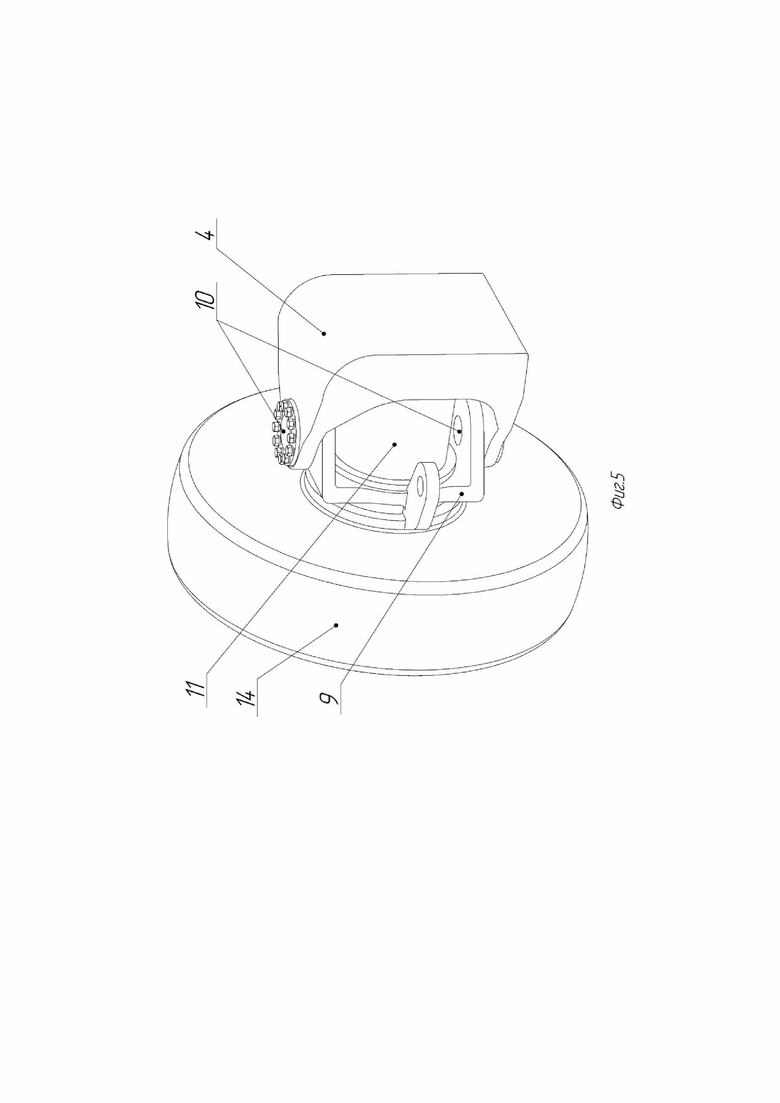
Фиг. 5 - Поворотный кулак с кронштейном крепления рулевой тяги;
Фиг. 6 - Разрез Б-Б. Неподвижные опоры на раме и поворотный кулак интегрирован в корпус двигателя;
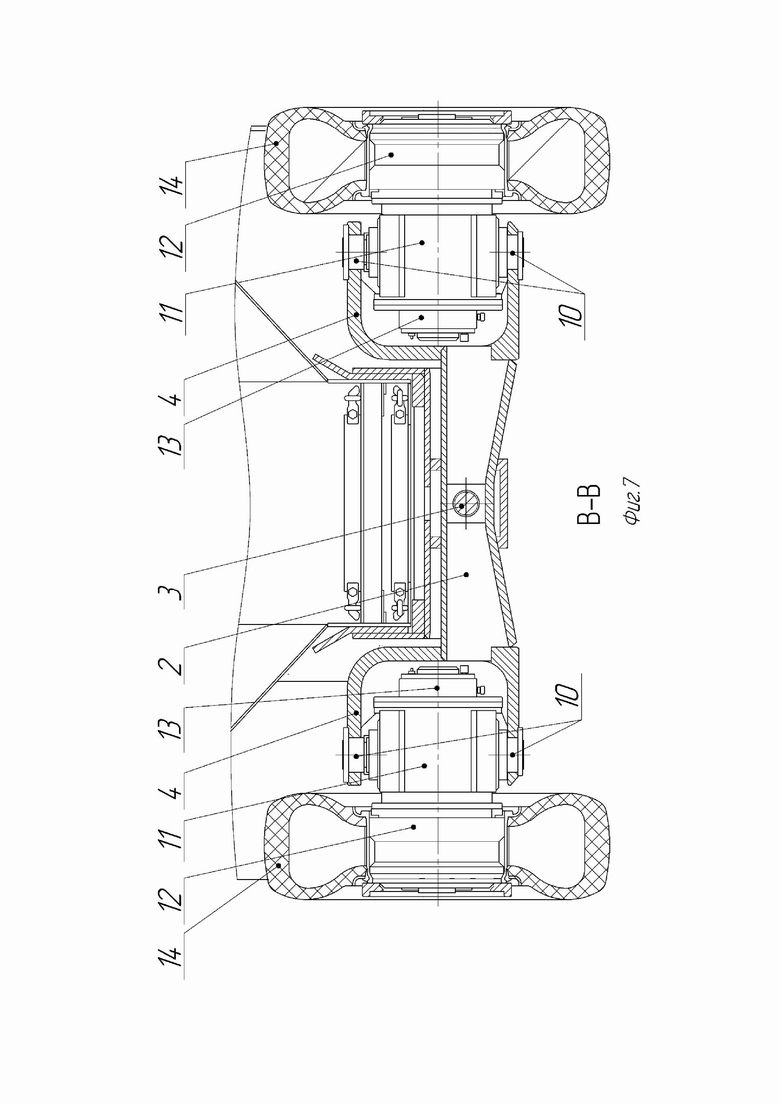
Фиг. 7 - Разрез В-В. Неподвижные опоры на качающейся балке и поворотный кулак интегрирован в корпус двигателя;
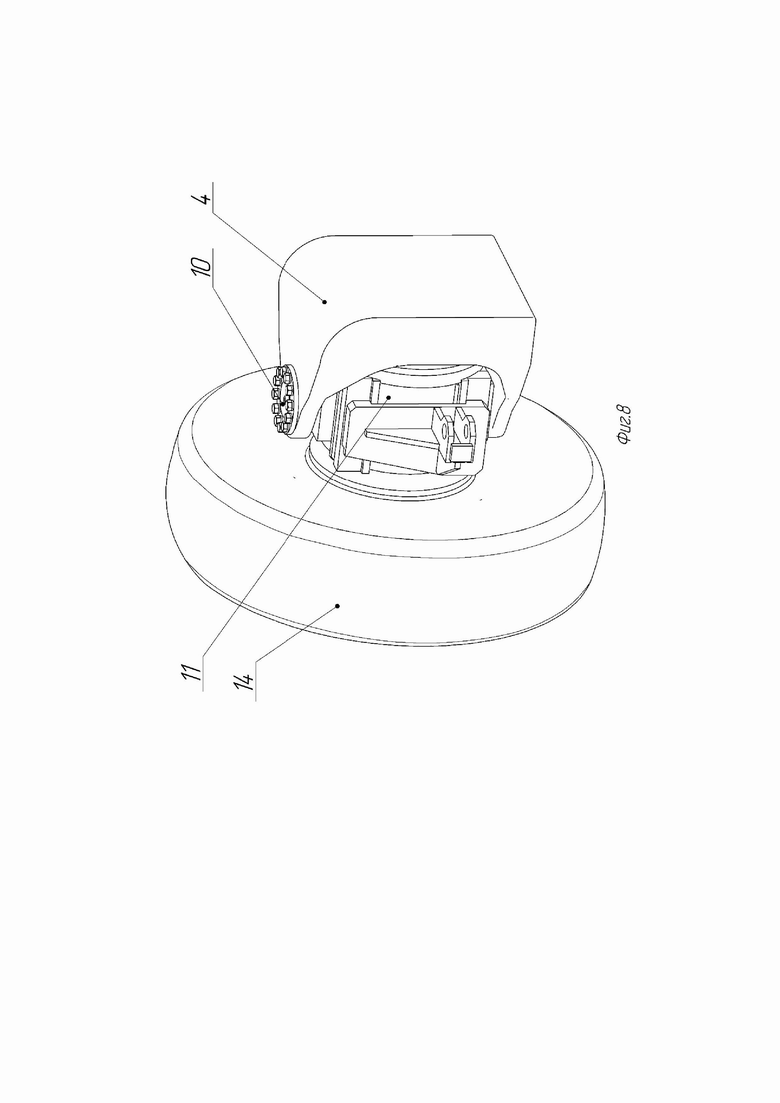
Фиг. 8 - Поворотный кулак интегрированный в корпус двигателя.
Осуществление изобретения
Исполнение шахтной самоходной машины в соответствии с формулой изобретения может содержать следующие элементы: раму ходовой части (1), качающуюся балку (2), ось качающейся балки (3) неподвижные опоры (4), механизм управления, в состав которого входят гидроцилиндры управления (5), трехплечевые рычаги (б), продольная тяга (7), поперечные рулевые тяги (8), поворотные кулаки (9) и оси (10), движители выполненные по схеме мотор-колесо, в состав которых входят двигатель (11), двухступенчатый планетарный редуктор (12), тормозной механизм (13), и колесо (14); двигатель (11) соединен с двухступенчатым планетарным редуктором (12), посредством поворотного кулака (9) верхняя и нижняя части которого через оси (10) соединены с неподвижной опорой (4). Поворотный кулак (9) каждого привода соединен с поперечной рулевой тягой (8).
Изобретение работает следующим образом: Шахтная самоходная машина начинает движение по горной выработке. При этом одновременно работают все движители выполненные по схеме мотор-колесо. В каждом из движителей, установленных в неподвижных опорах 4, вращение ободу колеса 14 передается от двигателя 11 через двухступенчатый планетарный редуктор 12. При проезде неровностей для исключения вывешивания колес 14 конструкцией машины предусмотрена качающаяся балка 2 с установленной на осях 10 в ее неподвижных опорах 4 первой парой движителей. Качающаяся балка 2 установленная на оси 3 в раме ходовой части 1 имеет возможность качания относительно рамы, что при проезде неровностей исключает вывешивание первой пары управляемых движителей, а также их пробуксовку, что повышает точность управления при маневрировании машины и повышает ее эксплуатационные характеристики. Вторая пара управляемых движителей установлена на осях 10 в неподвижных опорах 4 рамы ходовой части 1 и возможности качания не имеет.
При необходимости проезда поворотов маневрирование шахтной самоходной машины происходит при помощи механизма управления. Гидроцилиндры управления 3 передают поступательное движение на два трехплечевых рычага 6, установленных с возможностью поворота на осях относительно рамы ходовой части. Далее движение от каждого трехплечевого рычага 6 при помощи поперечных рулевых тяг 8 передается на поворотные кулаки 9, с закрепленными в них двигателями 11 движителей, установленных на поворотных осях 10 в неподвижных опорах 4 качающейся балки 2 и рамы ходовой части 1. Происходит поворот движителей. Управляемые колеса каждой пары движителей поворачиваются одновременно и на одинаковый угол, так как повороты каждого из трехплечевых рычагов 6 синхронизированы между собой установкой продольной тяги 7, что существенно повышает точность управления машиной при ее маневрировании. Следует отметить, что вышеприведенная конструкция содержит минимальное количество поперечных и продольных рулевых тяг и соответственно минимальное количество шарниров в местах их соединений между собой, что в процессе работы машины минимизирует суммарную величину люфтов в шарнирах и повышает точность управления машиной при ее маневрировании.
Торможение и растормаживание транспортного средства происходит за счет тормозного механизма 13, установленного на втором конце двухстороннего вала ротора двигателя 11, что повышает компактность движителя и позволяет затормаживать вал ротора двигателя и непосредственно входное звено планетарного редуктора соединенное с его первым концом, что в свою очередь позволяет более точно распределять тормозные усилия и повышает точность управления при остановке машины.
Заявляемое изобретение может найти широкое применение в горной промышленности при проведении выработок породы, в частности в приводных механизмах, ходовых частях, приводных устройствах самоходных тележек различных машин (самоходные вагоны, бункеры-перегружатели, самоходные и буро-анкеровальные машины и установки, доставочные платформы, погрузо-доставочные машины, передвижные транспортные системы и конвейеры). Приведенный выше перечень примеров использования изобретения не является исчерпывающим.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтная самоходная машина | 2023 |
|
RU2825776C1 |
| Самоходная машина | 1983 |
|
SU1404379A1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| Самоходная машина | 1987 |
|
SU1731657A1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| РУЛЕВОЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2032570C1 |
| Съемная ходовая часть вездеходного комплекса | 2024 |
|
RU2834096C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| Устройство для управления гидрообъемной трансмиссией транспортного средства | 1986 |
|
SU1379147A1 |
| УСТРОЙСТВО НАКЛОНА УПРАВЛЯЕМЫХ КОЛЕС | 2004 |
|
RU2264318C1 |



Изобретение относится к горной технике. Шахтная самоходная машина содержит ходовую часть с рамой, первую пару движителей, вторую пару движителей, механизмы управления поворотом первой и второй пар движителей. Каждый из движителей выполнен в виде мотор-колеса. Первая пара мотор-колес установлена в неподвижных опорах с возможностью поворота вокруг вертикальной оси на балке, которая соединена с рамой с возможностью качания вокруг горизонтальной оси симметрии машины. Вторая пара мотор-колес установлена в неподвижных опорах с возможностью поворота вокруг вертикальной оси на раме. Каждый механизм управления включает трехплечевой рычаг, гидроцилиндр, связывающий раму с первым плечом трехплечевого рычага, поперечные рулевые тяги, связывающие каждый движитель со вторым плечом трехплечевого рычага. При этом третьи плечи трехплечевых рычагов механически соединены друг с другом. Каждый движитель содержит поворотный кулак с закрепленным в нем двигателем, установленным в неподвижных опорах на поворотных осях. Техническим результатом является повышение точности маневрирования при движении шахтной самоходной машины. 1 з.п. ф-лы, 8 ил.
1. Шахтная самоходная машина, содержащая
- ходовую часть с рамой, первую пару движителей, вторую пару движителей, механизмы управления поворотом упомянутых первой и второй пар движителей;
- каждый из упомянутых движителей выполнен в виде мотор-колеса;
- первая пара упомянутых мотор-колес установлена в неподвижных опорах с возможностью поворота вокруг вертикальной оси на балке, которая соединена с упомянутой рамой с возможностью качания вокруг горизонтальной оси симметрии машины, вторая пара упомянутых мотор-колес установлена в неподвижных опорах с возможностью поворота вокруг вертикальной оси на упомянутой раме;
- каждый упомянутый механизм управления включает трехплечевой рычаг, гидроцилиндр, связывающий раму с первым плечом упомянутого трехплечевого рычага, поперечные рулевые тяги, связывающие каждый движитель со вторым плечом упомянутого трехплечевого рычага, при этом третьи плечи трехплечевых рычагов механически соединены друг с другом.
2. Машина по п.1, отличающаяся тем, что каждый движитель содержит поворотный кулак с закрепленным в нем двигателем, установленным в неподвижных опорах на поворотных осях.
| СПОСОБ БОЧКООБРАЗНОГО ШЕВИНГОВАНИЯ | 0 |
|
SU180468A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1985 |
|
SU1281466A1 |
| US 2916099 A, 08.12.1959 | |||
| US 3092201 A, 04.06.1963 | |||
| US 5531466 А, 02.07.1996 | |||
| US 2008048414 A1, 28.02.2008. | |||

