Изобретение относится к авиакомплексам боевым (АКБ) с беспилотным самолетом-вертолетом (БПСВ) схемы тандем, включающим фюзеляж со скошенными назад передним и задним кольцевыми каналами (ПКК и ЗКК), имеющими на выходе бипланные элевоны и J-образные киль-шайбы, но и турбовинтовые или турбореактивные или электрические двигатели, приводящие их поперечные винты, создающие тягу для вертикального взлета-посадки и горизонтального скрытного, огибая рельеф, полета при горизонтальном положении фюзеляжа БПСВ.
Известен (см. https://cont.ws/@Drozd/1725375) беспилотный летательный аппарат (БПЛА) "Cormorant/CityHawk" компании "Tactical Robotics" (Израиль), выполненный по схеме несущего фюзеляжа с газотурбинной/водородно-электрической силовой установкой, приводящей передний и задний подъемные вентиляторы и в двух задних кольцевых каналах боковые маршевые винты, обеспечивающие при транспортировке людей и грузов соответствующие режимы полета, автоматически огибая рельеф.
Признаки, совпадающие - надрельефный БПЛА "Cormorant" выполнен в виде несущего фюзеляжа, имеющего вес пустого 771 кг, длину 6,8 м, ширину 3,5 м, высоту 2,3 м и турбовальный двигатель (ТВаД) Turbomeca Arriel 2С2 (мощностью 944 л.с.), приводящий передний и задний подъемные вентиляторы (D=1,8 м), но и два боковых винта в кольцевых каналах, обеспечивающих при взлетном его весе 1406 кг скорость 120/185 км/ч соответственно при расходе топлива 132/163 кг/час и на высоте 3600 м дальность полета с четырьмя пассажирами 200 км. Корпус БПЛА изготовлен из композиционных материалов, в котором полезная нагрузка (635 кг), включая и топливо.
Причины, препятствующие поставленной задаче: первая - это то, что двигатель размещен в корпусе между подъемными вентиляторами, имеющими Т-образную трансмиссию с длиной валов 7,4 м, но и верхние и нижние управляемые створки, отклоняющие их воздушный поток для осуществления изменения балансировки по тангажу, крену и курсу, что усложняет управляемость и безопасность полета в случае отказа одного ТВаД. Вторая - это то, что размещение боковых кабин, подъемных вентиляторов и ТВАД в его несущем корпусе предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения взлета/посадки и горизонтального полета имеется двойная система создания вертикальной и маршевой тяги, при этом маршевые винты при вертикальном взлете/посадке, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции, а отсутствие крыльев предопределяет постоянную работу подъемных вентиляторов, что весьма уменьшает, увеличивая расход топлива, весовую отдачу.
Известен самолет вертикального взлета и посадки (СВВП) типа F-35B (США) с трапециевидным крылом и подкрыльными соплами, создающими вертикальную тягу и управление по крену, имеет (см. https://wikidea.ru/wiki/Pratt_%26_Whitney_F135) турбореактивный двухконтурный двигатель (ТРДД) с отклоняемым вектором тяги сопла и отбором мощности на привод подъемного вентилятора и V-образное оперение.
Признаки, совпадающие - силовая установка СВВП включает ТРДД типа F135- PW-600 взлетной мощности 42800 кВт, имеет модуль поворотного сопла для вертикального взлета-посадки, при котором мощность 21600 кВт и 4210 кВт от ТРДД соответственно передается продольным валом и через муфту сцепления на подъемный вентилятор и отбирается посредством подачи воздуха от его компрессора на подкрыльные сопла для подъемной тяги и управления самолетом по крену.
Причины, препятствующие поставленной задаче: первая - это то, что заднее расположение ТРДД с его поворотным соплом, изменяющим вектор реактивной тяги, имеет для отбора взлетной его мощности передний вывод вала посредством редуктора и муфты сцепления на подъемный вентилятор, установленный за кабиной пилота в фюзеляже с верхней и нижней раскрываемыми створками, отклоняющими его воздушный поток в продольном направлении, что усложняет конструкцию. Вторая - это то, что размещение за кабиной пилота подъемного вентилятора диаметром 1,27 м предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения взлета имеется двойная система создания вертикальной горячей тяги от поворотного сопла ТРДД, предопределяющего термостойкое исполнение палубы корабля, но и холодной тяги от подъемного вентилятора и подкрыльных сопел, которые при горизонтальном его полете, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции и уменьшению весовой отдачи. Кроме того, использование форсажного режима работы ТРДД с его тягой 19050 кгс повышает удельный расход топлива на 52%, уменьшает вдвое дальность полета и ограничивает бесфорсажную скорость не более 950 км/ч.
Наиболее близким к предлагаемому изобретению является [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] британский палубный авиационно-ракетный комплекс (ПАРК) типа "Icara" с реактивным беспилотным летательным аппаратом (БПЛА), имеющим крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ) для управления с командного пункта (КП) корабельного средства базирования.
Признаки, совпадающие - БПЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет самонаводящуюся противолодочную торпеду (ПЛТ) типа Мк.44, имеющую при ее массе 196 кг, длине 2,57 м и диаметре 324 мм, скорость 30 узлов и дальность хода 5 км. БПЛА с торпедой Мк.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность до 24 км и скорость полета до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БПЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположении цели поступали от гидроакустической системы надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем в полете передавал их через БСУ на БПЛА. По прибытии БПЛА в район нахождения цели торпеда Мк.44, полуутопленная с подфюзеляжным ее расположением в корпусе БПЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БПЛА продолжает полет с работающей СУ, уводя его от места приводнения самонаводящейся ПЛТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БПЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном ПАРК типа "Icara" повышения скорости и дальности полета, уменьшения времени и угла отклонения в вертикальной плоскости скошенных назад ПКК и ЗКК с их поперечными винтами, исключения узлов их поворота посредством кабрирования БПСВ на угол 45° при изменении маршевой тяги на вертикальную, обеспечения автоматических вертикального взлета-посадки на хвост, но и скрытного, огибая рельеф, перемещения.
Отличительными признаками предлагаемого изобретения от указанного выше известного ПАРК типа "Icara", наиболее близкого к нему, являются наличие того, что транспортно-ударный АКБАР имеет группу аппаратов вертикального или короткого взлета-посадки (ВВП или КВП) или их старта с ракетным ускорителем с подъемного на угол тангажа θ=45° ПУ или сброса с ПУ авиа-носителя, включающую один или более чем один беспилотный самолет-вертолет (БПСВ) с электровинтовыми или тур-бовинтовыми/винтореактивными гондолами (ЭВГ или ТВГУВРГ) или в их комбинации, приводящими более чем одну двухвинтовую поперечную схему (ДВПС), например, в двух профилированных переднем и заднем кольцевых каналах (ПКК и ЗКК), выполняющих роль тандемных кольцевых крыльев (ТКК), имеющих верхние секции с их надфюзеляжными пилонами (НФП) и нижние секции, закрепленные на соответствующих сторонах фюзеляжа, содержащего в ею середине вогнутую нижнюю и выпуклую верхнюю части с отсеком-кабиной, выкидываемой с ее парашютной спасательной системой по двум направляющим, которые интегрированы с НФП на ПКК и ЗКК и вынесены соответственно за заднюю и переднюю их кромки, но и овальную форму и угол 22,5° наклона их кромок от вертикали соответственно при виде спереди и сбоку, при этом каждая ДВПС-Х2 имеет воздушные винты (ВВ), выполненные с возможностью автоматической установки лопастей в положение их авторотации или во флюгерное положение, смонтированные с их перекрытием, равным апоп=2,3-2,4 и на их удобообтекаемых гондолах (УОГ), закрепленных в ПКК и ЗКК на продольных и поперечном соответственно меньших и большем ребрах жесткости (МРЖ и БРЖ), причем ЗКК содержит на выходе две J-образные киль-шайбы (JOK) с рулями направления и высокорасположенные секции обратной или прямой стреловидности (СОС или СПС) или в их комбинации, при этом тянущие ВВ в ПКК и ЗКК вынесены при виде сбоку с размещением под углом 22,5° низа и верха отклоненной назад плоскости их вращения соответственно к передней и задней их кромкам, причем составная турбовинтовая/турбореактивная СУ (ТВСУ/ТРСУ) имеет более чем один соответствующий двигатель (ТВД/ТРД) или двухконтурный ТРД (ДТРД) содержит спаренные или разнесенные две ТВГ с их ТВД, смонтированные в носовой части фюзеляжа или в ПКК, и спаренные ВРГ в ЗКК с их ТРД и их раздельными трактами горячих газов, поток которых направляется в их реактивные прямоугольные сопла (РПС), создающие с V-образными в плане задними кромками и термопоглощающим их покрытием в пропульсивно-реактивной системе (ПРС) подъемную или наклонно-маршевую тягу, обеспечение последней способствует выполнению горизонтального скрытного, огибая рельеф, полета, при этом в БПСВ для выполнения ВВП или КВП разнесенные его JOK имеют неубирающиеся задние колеса, используемые в трехопорном шасси с передней убирающейся управляемой амортизационной стойкой, снабженной вздыбливающейся двухколесной тележкой, снабженной ее поворотом вокруг оси для увеличения взлетного угла тангажа, причем в каждой JOK имеется на округлой при виде сбоку нижней ее части ролики и сзади удобообтекаемый обтекатель (УОО) с амортизационной стойкой неубирающегося небольшого колеса, используемого с его тормозами для ВВП на хвост и размещением оси его УОО параллельно оси вращения ВВ в ЗКК, при этом выполнение ВВП и зависания создается кабрированием БПСВ на угол 45°, обеспечиваемым за счет разной подъемной тяги ВВ в ПКК и ЗКК, позволяя затем ВВ и ТРД тянуть вертикально, а для горизонтального полета, например, СОС раскладываются и БПСВ возвращается обратно вниз на угол 45°, наклоняя ТКК и СОС до оптимального угла их атаки, необходимого для крейсерского полета, причем на выходе ПКК смонтированы бипланные элевоны (БПЭ), размещенные вдоль средней линии его БРЖ, разнесены наружу от фюзеляжа, при этом выполнение ВВП, зависания и автоматической вертикальной посадки обеспечивается в удвоенной ДВПС-Х2 с двумя парами их ВВ, выполненных реверсивными, с жестким креплением их лопастей, без автоматов их перекоса и с изменением общего и дифференциального их шага, обеспечивающие балансировку по тангажу и крену соответственно путем изменения углов установки двух передних с двумя их задними ВВ и левой пары с правой парой их ВВ, а изменение балансировки по курсу, обдувая левые и правые БПЭ в ЗКК, обеспечивается дифференциальным вперед/назад при виде сбоку их отклонением на углы ±15° от вертикали, причем, например, турбовинтореактивная СУ (ТВРСУ) содержит как, например, разнесенные ТВГ, размещенные продольной их осью под углом 2-3° к оси симметрии и ближе к последней от разнесенных JOK в ЗКК, закреплены снизу ПКК и под его УОГ, имеют ТВД с лобовыми воздухозаборниками и для отбора взлетной их мощности передние выводы валов, которые вращательно связаны через муфты сцепления с их промежуточными угловыми редукторами при виде сверху и сбоку, передающими крутящий момент синхронизирующим и выходными их валами, проложенными в нижней секции ПКК и МРЖ соответственно на другой промежуточный угловой редуктор и угловые редукторы встречно вращающихся ВВ в ПКК, так и спаренные ВРГ, смонтированные по центру ЗКК и в кормовой части фюзеляжа с выносом за его конец прямоточных РПС в их ТРД, содержат надфюзеляжные воздухозаборники их ТРД, имеющих для отбора взлетной их мощности передние выводы валов, которые вращательно связаны через муфты их сцепления с Т-образным в плане редуктором, передающим его выходными валами, проложенными в его БРЖ, крутящий момент на угловые редукторы встречно вращающихся ВВ в ЗКК, имеющих одинаковое направление вращения с диагонально расположенными ВВ в ПКК, при этом в ТВРСУ после остановки тормозами отключенных от системы трансмиссии двух- или трехлопастных ВВ (ДВВ или ТВВ) и автоматической установки лопастей, например, ДВВ во флюгерное положение с их фиксацией и размещением вдоль МРЖ и БРЖ и ПКК, и ЗКК или их складывание вдоль продольных на УОГ уступы, смонтированных между их МРЖ и БРЖ, преобразуется полетная конфигурация БПСВ с турбовинтореактивного в реактивный самолет, причем транспортный или ударный БПСВ с его ЗКК, снабженным, например, правой СОС и левой СПС, которые с их флаперонами, имея параллельные соответственно переднюю и заднюю, но и заднюю и переднюю их кромки, образуют секции двусторонней асимметрии (СДА) и обеспечивают, уменьшая волновое сопротивление на 280% и потребную тяговооруженность на 44%, высокоскоростной или трансзвуковой полет при синхронном отклонении вниз и фиксации соответственно с углом ϕ=-10° или ϕ=-25° его внешних СДА, снабженных возможностью полного отклонения вниз и фиксации без их выноса за JOK в ЗКК для уменьшения габаритов на стоянке, при выполнении ВВП и при подвесе его на ПУ авианосителя.
Кроме того, для выполнения БПСВ режимов ВВП и зависания при удельной нагрузке на мощность, составляющей ρN=1,25-1,7 кг/л.с. с учетом подъемной тяги от адаптивной его ТВРСУ, каждый ее ТВД/ТРД выполнен с элементами цифрового программного управления, сочетающего как систему их синхронизации, оснащенную последовательно соединенными блоком приведения давления в компрессоре каждого ТВД/ТРД, блоком формирования заданного значения частоты вращения и углового положения лопаток их ТВД/ТРД и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ТВД/ТРД и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета при удельной вертикальной тягово-оруженности в упомянутой удвоенной ДВПС-Х2, составляющей ρвт=1,6-1,7 без учета потерь от обдува его ПКК/ЗКК, включает при выполнении ВВП номинальный или максимальный режимы (HP и MP) работы ТВД/ТРД при отборе 100% или 123%/50% или 75% их мощности на привод, например, ДВВ соответственно от двух или одного из работающих ТВД/ТРД с автоматическим выравниванием и равным перераспределением оставшейся мощности между ДВВ при отказе одного ТВД/ТРД, например, даже в последнем случае после автоматического включения MP работы оставшихся в работе ТВД/ТРД. обеспечивающих при удельной вертикальной тяговооруженности ρвт=1,15 как режим аварийной вертикальной посадки в течение 2,5 минут, так и выполнение переходного маневра и продолжение полета в самолетной его конфигурации, причем упомянутая БСУ головного БПСВ оснащена в носовой части фюзеляжа двухчастотной бортовой радиолокационной станцией (РЛС) с активной фазированной антенной решеткой (АФАР), которая совместно с оптико-электронной станцией (ОЭС), смонтированной снизу носового уступа фюзеляжа или сверху его скоса, обеспечивают геолокацию малозаметной цели и управление оружейными нагрузками головного БПСВ, и по лазерному каналу связи другими удаленно-ведомыми БПСВ с наведением на цель их противотанковых УР (ПТУР), например, 9К135 «Корнет», установленные в двух или более чем в двух транспортно-пусковых контейнерах (ТПК), смонтированных внутри отсека фюзеляжных на катапультных ПУ и по обе стороны от оси симметрии или в подкрыльных ТПК под нижней секцией ПКК и выносом за ее кромки автоматически открываемых передней и задней заслонок ТПК, при этом упомянутые ЭВГ с электродвигателями-генераторами (ЭДГ) и их ДВВ смонтированы, например, в ПКК, интегрированы с его УОГ, обеспечивают для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения двух ЭДГ от авторотации их ДВВ при косой обдувке в ПКК от набегающего воздушного потока при горизонтальном полете, причем планер БПСВ выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой обшивке планера с его фюзеляжем и упомянутыми ТКК с СДА и JOK, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно, его упомянутой БСУ, обеспечивающей с наземного КП или пилотом рядом летящего авиа-носителя дистанционное управление оператором или автоматическое выполнение надрельефного полета посредством системы цифровой корреляции с рельефом местности, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет, установленная в носке ПКК цифровая тепловизионная камера, обеспечивающая как корреляцию отображения объекта для фиксации местности перед БПСВ, так и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать.
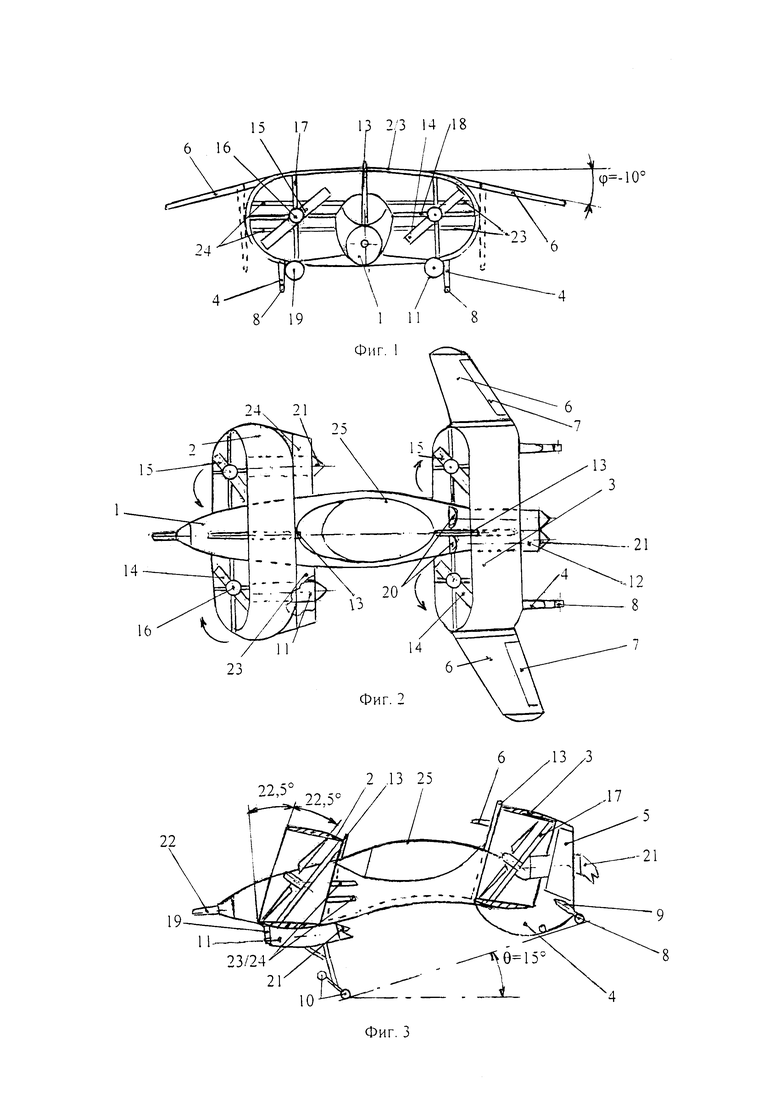
Предлагаемое изобретение АКБАР с палубным БПСВ, имеющим фюзеляж, скошенные назад ПКК с БПЭ и разнесенными ТВД и ЗКК с СДА и спаренными ТРД, приводящими ДВВ в удвоенной ДВПС-Х2, иллюстрируется на общих видах фиг. 1-3:
фиг. 1,2 в конфигурации реактивного БПСВ с разложенными СДА, ПКК и ЗКК с флюгерно-зафиксированными их ДВВ и ТРД в ЗКК, создающими маршевую тягу;
фиг. 3 в конфигурации турбовинтореактивного БПСВ ВВП с ПКК с ТВД и ЗКК с ТРД, создающими с тянущими ДВВ и двумя ТРД подъемную тягу при отклонении вниз их РПС для его кабрирования при увеличении угла тангажа с θ=15° до θ=45°.
Противолодочный БПСВ представлен на фиг. 1-3, выполнен с удвоенной ДВПС-Х2 и ПРС-Я2, имеет фюзеляж 1 с ПКК 2 и ЗКК 3, на выходе последнего имеются два JOK 4 с рулями их направления 5 и СДА 6 с их флаперонами 7. Трехопорное шасси с неубирающимися колесами 8, обеспечивающими с их тормозами выполнение ВВП на хвост, смонтированы с выносом их от ЗКК 3 на концах УОО 9 в разнесенных JOK 4, используются с убирающейся носовой двухколесной тележкой 10 (см. фиг. 3). Скошенные назад и ПКК 2, и ЗКК 3, выполняя роль ТКК 2-3, имеют соответственно разнесенные ТВГ 11 и сдвоенные ВРГ 12, но и верхние секции с НФП 13 и нижние их секции, закрепленные на соответствующих сторонах фюзеляжа 1, содержат левые 14 и правые 15 ДВВ, которые вынесены при виде сбоку с размещением под углом 22,5° низа и верха отклоненной назад плоскости их вращения соответственно к передней и задней их кромкам (см. фиг. 3), установлены на УОГ 16, закрепленных на их МРЖ 17 и БРЖ 18. Каждая ТВГ 11/ВРГ 12 с лобовыми/надфюзеляжными воздухозаборниками 19/20 имеет по два ТВД/ТРД с их РПС 21 и для отбора 100%/50% взлетной мощности передние выводы валов, которые вращательно связаны через муфты сцепления с их промежуточными угловыми редукторами, передающими крутящий момент на угловые редукторы встречно вращающихся тянущих ДВВ 14-15.
Управление палубным БПСВ обеспечивается пилотом из кабины летящего на безопасном от него удалении, например, головного вертолета Ка-27, а целеуказание-опускаемой под воду лебедкой на тросе антенны гидроакустической станции последнего или в фюзеляже БПСВ его носовым 22 магнитометром. Внешнее вооружение БПСВ, например, две авиационные противолодочные ракеты-торпеды (АПР) типа АПР-3М установлены в отсеке фюзеляжа на их ПУ. При создании подъемной силы ДВВ 14-15 и реактивной тяги в ITPC-R2 или совместной маршевой их тяги при разбеге обеспечиваются режимы ВВП или КВП при соответствующем положении фюзеляжа 1. На режимах ВВП и зависания используется винтореактивно-подъемная тяга, обеспечиваемая каскадом ТВД/ТРД с их РПС 21 совместно с ДВВ 14-15 в удвоенной ДВПС-Х2, в которой управляющие силы и моменты обеспечиваются интенсивным обдувом ДВВ 14-15 в ПКК 2 его левых 23 и правых 24 БПЭ, изменяющих балансировку по курсу их дифференциальным вперед-назад отклонением на углы ±15° от вертикали, а балансировка по тангажу и крену осуществляется соответственно путем изменения углов установки двух передних 14-15 с двумя задними 14-15 ДВВ и левой пары 14-14 с правой парой 15-15 ДВВ (см. фиг. 2). Для преобразования турбовинтореактивного в реактивный БПСВ его четыре ДВВ 14-15 отключаются от системы трансмиссии, останавливаются их тормозами, затем их лопасти одновременно устанавливаются во флюгерное положение и фиксируются вдоль МРЖ 17 и БРЖ 18 в ТКК 2-3, которые с СДА 6 установлены под большим углом к горизонтали. На режиме перехода турбовинтореактивного БПСВ подъемная сила и маршевая тяга создается ТКК 2-3 с СДА 6 и четырьмя ДВВ 14-15 совместно с ТРД и их ПРС-Рч2 соответственно, при его полете как реактивного самолета со скоростью М=0,72- ТКК 2-3 с СДА 6, реактивная тяга - его ТРД в ITPC-R2. При горизонтальном полете БПСВ синхронное отклонение левых 23 и правых 24 БПЭ на ПКК 2 изменяет балансировку по тангажу, а управление креном и рысканьем обеспечивается отклонением дифференциальным флаперонов 7 на СДА 6 и синфазным рулей направления 5 в JOK 4 соответственно. Для уменьшения габаритов транспортного БПСВ на его стоянке и выполнении им ВВП его СДА 6 в ЗКК 3 отклоняются вниз и фиксируются без их выноса за JOK 4 в ЗКК 3, а его отсек-кабина 25 имеет парашютную спасательную систему.
Таким образом, освоение ударного АКБ АР с четырьмя его БПСВ-116, имеющими при их пуске с подкрыльной ПУ вертолета Ми-28НМ габариты 2,65×1,74×1,22 м, взлетный вес 388 кг при КВП и в ТВСУ четыре роторно-поршневых двигателя (РПД) ВА3-241 мощностью по 65 л.с. с их четырьмя ДВВ (D=0,74 м), несут по четыре ПТУР "Корнет" 9К135, позволит отработать дальность полета 1620 км за 3,6 ч, технологию ВВП на хвост и переход на горизонтальный полет за счет отклонения БПСВ-116 обратно вниз на 45° с его ТКК и СДА до оптимального угла их атаки. Освоение палубного БПСВ-400, имеющего с тремя УР "Гермес" взлетный вес 1410 кг при ВВП, ТКК с СДА и две пары ТВГ с РПД ВАЗ-4265 мощностью 270×4 л.с, приводящими в ПКК и ЗКК четыре ДВВ (D=1,7 м), создающих скорость в 2,7 раза больше, чем у БПЛА "Cormorant" от Tactical Robotics, позволит, имея сложенные габариты 6,2×4,0×2,8 м, транспортировать его, как и БПСВ-950 (см. табл. 1) в ангаре корабля, но и скрытно лететь как экраноплан, но и автоматически огибая рельеф, перемещать грузы и людей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| КОНВЕРТИРУЕМЫЙ ДВУХКИЛЕВОЙ ДОЗВУКОВОЙ САМОЛЕТ ТРЕХВАРИАНТНОГО БАЗИРОВАНИЯ | 2024 |
|
RU2833909C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| КОНВЕРТИРУЕМЫЙ ДОЗВУКОВОЙ САМОЛЕТ | 2024 |
|
RU2839782C1 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2823932C1 |
| ЛЕТАЮЩИЙ РОБОТ-НОСИТЕЛЬ РАКЕТ КОРАБЕЛЬНОГО И ВОЗДУШНОГО БАЗИРОВАНИЯ | 2018 |
|
RU2711430C2 |
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |
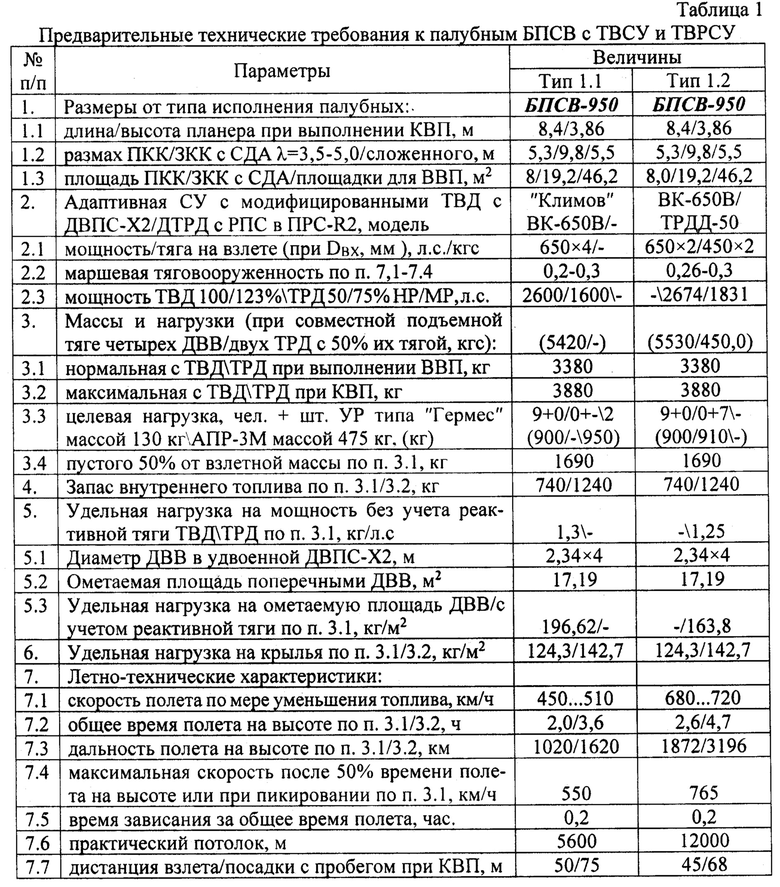
Изобретение относится к области авиации, в частности к конструкциям авиационных комплексов. Авиакомплекс боевой включает один или более чем один беспилотный самолет-вертолет (БПСВ) с электрическими или турбовинтовыми/турбореактивными двигателями или в их комбинации, приводящими более чем одну двухвинтовую поперечную схему в двух профилированных переднем и заднем кольцевых каналах, выполняющих роль тандемных кольцевых крыльев, имеющих верхние секции с их надфюзеляжными пилонами и нижние секции, закрепленные на соответствующих сторонах фюзеляжа. БПСВ содержит фюзеляж со скошенными назад передним и задним кольцевыми каналами, имеющими на выходе соответственно бипланные элевоны и J-образные киль-шайбы с раскладываемыми секциями крыла, адаптивную силовую установку, создающую, приводя поперечные их винты, реактивную тягу соответственно для вертикального взлета/посадки и горизонтального полета. Обеспечивается повышение скорости и дальности полета, уменьшение времени и угла отклонения в вертикальной плоскости скошенных назад ПКК и ЗКК с их поперечными винтами, автоматические вертикальные взлет-посадка на хвост. 1 з.п. ф-лы, 3 ил., 1 табл.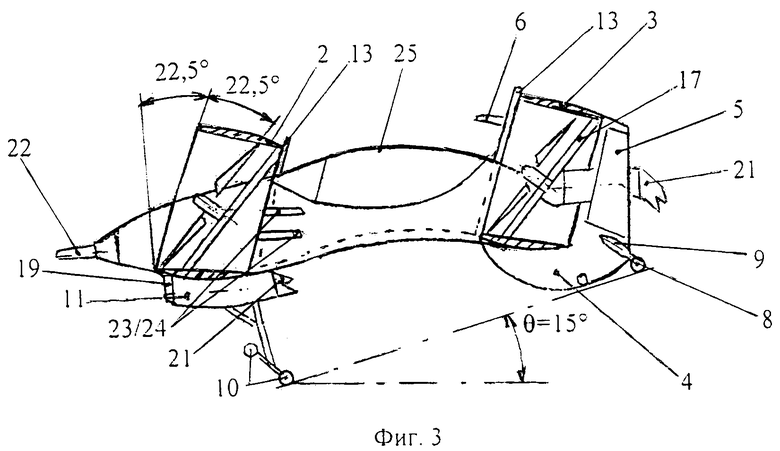
1. Авиакомплекс боевой с беспилотным летательным аппаратом, имеющим крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ) для управления с командного пункта (КП) средства базирования, отличающийся тем, что он содержит группу аппаратов вертикального или короткого взлета-посадки (ВВП или КВП) или их старта с ракетным ускорителем с подъемного на угол тангажа θ=45° ПУ или сброса с ПУ авианосителя, включающую один или более чем один беспилотный самолет-вертолет (БПСВ) с электрическими или турбовинтовыми/турбореактивными двигателями (ЭД или ТВД/ТРД) или в их комбинации, приводящими более чем одну двухвинтовую поперечную схему (ДВПС), например, в двух профилированных переднем и заднем кольцевых каналах (ПКК и ЗКК), выполняющих роль тандемных кольцевых крыльев (ТКК), имеющих верхние секции с их надфюзеляжными пилонами (НФП) и нижние секции, закрепленные на соответствующих сторонах фюзеляжа, содержащего в его середине вогнутую нижнюю и выпуклую верхнюю части с отсеком-кабиной, выкидываемой с ее парашютной спасательной системой по двум направляющим, которые интегрированы с НФП на ПКК и ЗКК и вынесены соответственно за заднюю и переднюю их кромки, но и овальную форму и угол 22,5° наклона их кромок от вертикали соответственно при виде спереди и сбоку, при этом каждая ДВПС имеет воздушные винты (ВВ), выполненные с возможностью автоматической установки лопастей в положение их авторотации или во флюгерное положение, смонтированные с их перекрытием, равным апоп=2,3-2,4, и на их удобообтекаемых гондолах (УОГ), закрепленных в ПКК и ЗКК на продольных и поперечном соответственно меньших и большем ребрах жесткости (МРЖ и БРЖ), причем ЗКК содержит на выходе две J-образные киль-шайбы (JOK) с рулями направления и высокорасположенные секции обратной или прямой стреловидности (СОС или СПС) или в их комбинации, при этом тянущие ВВ в ПКК и ЗКК вынесены при виде сбоку с размещением под углом 22,5° низа и верха отклоненной назад плоскости их вращения соответственно к передней и задней их кромкам, причем составная СУ с более чем одним ТВД и ТРД имеет соответственно спаренные или разнесенные две гондолы с их ТВД, смонтированные в носовой части фюзеляжа или в ПКК, и спаренные гондолы в ЗКК с их ТРД и их раздельными трактами горячих газов, поток которых направляется в их реактивные прямоугольные сопла (РПС), создающие с V-образными в плане задними кромками и термопоглощающим их покрытием в пропульсивно-реактивной системе подъемную или наклонно-маршевую тягу, обеспечение последней способствует выполнению горизонтального скрытного, огибая рельеф, полета, при этом в БПСВ для выполнения ВВП или КВП разнесенные его JOК имеют неубирающиеся задние колеса, используемые в трехопорном шасси с передней убирающейся управляемой амортизационной стойкой, снабженной вздыбливающейся двухколесной тележкой, снабженной ее поворотом вокруг оси для увеличения взлетного угла тангажа, причем в каждой JOК имеются на округлой при виде сбоку нижней ее части ролики и сзади удобообтекаемый обтекатель (УОО) с амортизационной стойкой неубирающегося небольшого колеса, используемого с его тормозами для ВВП на хвост и размещением оси его УОО параллельно оси вращения ВВ в ЗКК, при этом выполнение ВВП и зависания создается кабрированием БПСВ на угол 45°, обеспечиваемым за счет разной подъемной тяги ВВ в ПКК и ЗКК, позволяя затем ВВ и ТРД тянуть вертикально, а для горизонтального полета, например, СОС раскладываются и БПСВ возвращается обратно вниз на угол 45°, наклоняя ТКК и СОС до оптимального угла их атаки, необходимого для крейсерского полета, причем на выходе ПКК смонтированы бипланные элевоны (БПЭ), размещенные вдоль средней линии его БРЖ, разнесены наружу от фюзеляжа, при этом выполнение ВВП, зависания и автоматической вертикальной посадки обеспечивается в удвоенной ДВПС с двумя парами их ВВ, выполненных реверсивными, с жестким креплением их лопастей, без автоматов их перекоса и с изменением общего и дифференциального их шага, обеспечивающие балансировку по тангажу и крену соответственно путем изменения углов установки двух передних с двумя их задними ВВ и левой пары с правой парой их ВВ, а изменение балансировки по курсу, обдувая левые и правые БПЭ в ПКК, обеспечивается дифференциальным вперед/назад при виде сбоку их отклонением на углы ± 15° от вертикали, причем составная СУ содержит как, например, разнесенные гондолы, размещенные продольной их осью под углом 2-3° к оси симметрии и ближе к последней от разнесенных JOК в ЗКК, закреплены снизу ПКК и под его УОГ, имеют ТВД с лобовыми воздухозаборниками и для отбора взлетной их мощности передние выводы валов, которые вращательно связаны через муфты сцепления с их промежуточными угловыми редукторами при виде сверху и сбоку, передающими крутящий момент синхронизирующим и выходными их валами, проложенными в нижней секции ПКК и МРЖ соответственно на другой промежуточный угловой редуктор и угловые редукторы встречно вращающихся ВВ в ПКК, так и спаренные гондолы, смонтированные по центру ЗКК и в кормовой части фюзеляжа с выносом за его конец прямоточных РПС в их ТРД, содержат надфюзеляжные воздухозаборники их ТРД, имеющих для отбора взлетной их мощности передние выводы валов, которые вращательно связаны через муфты их сцепления с Т-образным в плане редуктором, передающим его выходными валами, проложенными в его БРЖ, крутящий момент на угловые редукторы встречно вращающихся ВВ в ЗКК, имеющих одинаковое направление вращения с диагонально расположенными ВВ в ПКК, при этом в составной СУ после остановки тормозами отключенных от системы трансмиссии двух- или трехлопастных ВВ (ДВВ или ТВВ) и установки лопастей, например, ДВВ во флюгерное положение с их фиксацией и размещением вдоль МРЖ и БРЖ в скошенных назад ПКК и ЗКК или их складывание вдоль продольных на УОГ уступы, смонтированных между их МРЖ и БРЖ, преобразуется полетная конфигурация БПСВ с турбовинтореактивного в реактивный самолет, причем транспортный или ударный БПСВ с его ЗКК, снабженным, например, правой СОС и левой СПС, которые с их флаперонами, имея параллельные соответственно переднюю и заднюю, но и заднюю и переднюю их кромки, образуют секции двусторонней асимметрии (СДА) и обеспечивают, уменьшая волновое сопротивление на 280% и потребную тяговооруженность на 44%, высокоскоростной или трансзвуковой полет при синхронном отклонении вниз и фиксации соответственно с углом ϕ=-10° или ϕ=-25° его внешних СДА, снабженных возможностью полного отклонения вниз и фиксации без их выноса за JOК в ЗКК для уменьшения габаритов на стоянке, при выполнении ВВП и при подвесе его на ПУ авианосителя.
2. Авиакомплекс боевой с беспилотным летательным аппаратом по п. 1, отличающийся тем, что для выполнения БПСВ режимов ВВП и зависания при удельной нагрузке на мощность, составляющей ρN=1,25-1,7 кг/л.с. с учетом подъемной тяги от адаптивной его составной СУ, каждый ее ТВД/ТРД выполнен с элементами цифрового программного управления, сочетающего как систему их синхронизации, оснащенную последовательно соединенными блоком приведения давления в компрессоре каждого ТВД/ТРД, блоком формирования заданного значения частоты вращения и углового положения лопаток их ТВД/ТРД и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ТВД/ТРД и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета при удельной вертикальной тяговооруженности в упомянутой удвоенной ДВПС, составляющей ρBT=1,6-1,7 без учета потерь от обдува его ПКК/ЗКК, включает при выполнении ВВП номинальный или максимальный режимы (HP и MP) работы ТВД/ТРД при отборе 100% или 123%/50% или 75% их мощности на привод, например, ДВВ соответственно от двух или одного из работающих ТВД/ТРД с автоматическим выравниванием и равным перераспределением оставшейся мощности между ДВВ при отказе одного ТВД/ТРД, например, даже в последнем случае после автоматического включения MP работы оставшихся в работе ТВД/ТРД, обеспечивающих при удельной вертикальной тяговооруженности ρBT=1,15 как режим аварийной вертикальной посадки в течение 2,5 минут, так и выполнение переходного маневра и продолжение полета в самолетной его конфигурации, причем упомянутая БСУ головного БПСВ оснащена в носовой части фюзеляжа двухчастотной бортовой радиолокационной станцией (РЛС) с активной фазированной антенной решеткой (АФАР), которая совместно с оптико-электронной станцией (ОЭС), смонтированной снизу носового уступа фюзеляжа или сверху его скоса, обеспечивают геолокацию малозаметной цели и управление оружейными нагрузками головного БПСВ, и по лазерному каналу связи другими удаленно-ведомыми БПСВ с наведением на цель их противотанковых УР (ПТУР), например, 9К135 «Корнет», установленные в двух или более чем в двух транспортно-пусковых контейнерах (ТПК), смонтированных внутри отсека фюзеляжных на катапультных ПУ и по обе стороны от оси симметрии или в подкрыльных ТПК под нижней секцией ПКК и выносом за ее кромки автоматически открываемых передней и задней заслонок ТПК, при этом упомянутые гондолы с ЭД-генераторами (ЭДГ) и их ДВВ смонтированы, например, в ПКК, интегрированы с его УОГ, обеспечивают для подзаряди аккумуляторной батареи способ генерации мощности от внешнего источника энергии посредством вращения двух ЭДГ от авторотации их ДВВ при косой обдувке в ПКК от набегающего воздушного потока при горизонтальном полете, причем планер БПСВ выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого корпуса с использованием алюминиево-литиевых сплавов и улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости в единой обшивке планера с его фюзеляжем и упомянутыми ТКК с СДА и JOК, которые армированы углеродным волокном, способным защитить от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла, особенно его упомянутой БСУ, обеспечивающей с наземного КП или пилотом рядом летящего авианосителя дистанционное управление оператором или автоматическое выполнение надрельефного полета посредством системы цифровой корреляции с рельефом местности, которую с ее каналом позиционирования ГЛОНАСС и радиолокационным высотомером дополняет установленная в носке ПКК цифровая тепловизионная камера, обеспечивающая как корреляцию отображения объекта для фиксации местности перед БПСВ, так и сравнивание информации с камеры и цифровых ее изображений, полученных с помощью спутников или воздушной разведки и хранящихся в памяти компьютера БСУ цифровых карт высот местности, над которой, огибая рельеф и препятствия, предстоит скрытно пролетать.
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2548444C2 |
| К | |||
| Сергеев | |||
| "Противолодочные ракетные комплексы", журнал "Зарубежное военное обозрение", 7, 1989, сс.55-61, http://factmil.com/load/zhurnaly/zarubezhnoe_voennoe_obozrenie/zarubezhnoe_voennoe_obozrenie_7_1989/14-1-0-55 | |||
| US 20030136873 A1, 24.07.2003 | |||
| WO 2007108794 A1, | |||

