Область техники
Настоящее изобретение относится к ортопедическому режущему и направляющему устройству для соблюдения направления при вырезании кости во время хирургической операции и к ортопедическому роботу, в котором установлено данное устройство.
Уровень техники
С быстрым развитием робототехники требования к ее применению в различных областях постоянно расширяются, и перспективы развития медицинской области также становятся очень заметными. В ортопедической хирургии преимущества использования вспомогательных роботов становятся все более очевидными. В свою очередь, для операций по рассечению кости имеет важное значение определение поверхности разреза, что оказывает большое влияние на точность всего процесса операции и, следовательно, на ход реабилитации пациента.
Раскрытие сущности изобретения
Для решения указанной технической задачи в настоящем изобретении предлагается ортопедический Ζ-образное режущее и направляющее устройство, которое может быть точно расположено, а также ортопедический хирургический робот, в котором используется данное устройство, помогающее оператору определять положение и угол плоскости разреза во время операции, и который может быть адаптирован к активному и пассивному режимам работы устройства, чтобы использовать их для достижения точного позиционирования плоскости резания.
Технические решения, охарактеризованные в настоящей заявке, следующие. Ортопедическое Ζ-образное режущее направляющее устройство содержит быстро установочный фланец, установочное основание, Ζ-образный удлинительный хвостовик и стопор. Один конец быстро установочного фланца прикреплен к концу механической руки и быстро монтируется посредством установочной конструкции, другой конец быстро установочного фланца прикреплен к установочному основанию, к которому неподвижно прикреплен Ζ-образный удлинительный хвостовик, конец Ζ-образного удлинительного хвостовика неподвижно прикреплен к стопору, который имеет направляющую канавку, немного более широкую, чем лезвие вибрационной пилы, и позволяющую лезвию проходить через нее.
На Ζ-образном удлинительном хвостовике с помощью резьбы закреплен хвостовик перемещения.
Указанный фланец имеет канавки, а указанная установочная конструкция содержит три отверстия для штифтов, которые выполнены на передней поверхности фланца, при этом указанные три отверстия для штифтов расположены относительно друг друга в виде вершин равнобедренного треугольника и соответствуют быстро установочным штифтам, цилиндрическим штифтам и алмазным штифтам, соответственно, при этом отверстия для штифтов в вершинах треугольника предназначены для посадки с натягом быстро установочного фланца и быстро установочного штифта концевой части с местом стыковки механической руки, а два отверстия для штифтов на нижней стороне соответствуют цилиндрическим штифтам и алмазным штифтам.
На передней поверхности установочного фланца имеются три сквозных отверстия с потайной головкой, расположенных относительно друг друга в виде вершин равнобедренного треугольника, который противоположен равнобедренному треугольнику, образованному тремя отверстиями для штифтов, а установочный фланец и концевая часть механической руки зафиксированы тремя потайными болтами, проходящими через три сквозных отверстия с потайной головкой соответственно.
Передняя поверхность установочного фланца также имеет два резьбовых отверстия А для крепления установочного основания к установочному фланцу.
Три отверстия под штифты, три сквозных отверстия с потайной головкой и два резьбовых отверстия А на передней поверхности установочного фланца лежат на одной окружности под углом 45° относительно друг друга.
При этом установочное основание имеет, по существу, такую же форму, как и фланец для быстрого монтажа, а в поверхности канавки установочного основания выполнены два отверстия для штифтов, которые соответственно установлены с натягом на цилиндрический штифт и алмазный штифт, причем угол между линией, на которой лежат два отверстия для штифтов, и центром окружности установочного основания составляет 90°.
Поверхность канавки установочного основания (2) имеет два болта, соединенных с внутренними шестигранными потайными головками, для фиксации Ζ-образного удлинительного хвостовика (3) к внутренней шестигранной потайной головке через отверстие I (9) установочного основания (2).
Два сквозных отверстия с внутренними шестигранными потайными головками выполнены на передней поверхности установочного основания, при этом два сквозных отверстия с внутренними шестигранными потайными головками закрепляют установочное основание на концевой части с местом стыковки механической руки с помощью внутренних шестигранных потайных головок болтов, закрепленных в сквозных отверстиях с потайными шестигранными головками II.
Резьбовые первое и второе отверстия с шестигранной потайной головкой выполнены противоположными, при этом линии, на которых лежат пары сквозных первых и вторых отверстий с шестигранной потайной головкой, расположены под углом 90° друг к другу.
На передней поверхности указанного установочного основания выполнена прямоугольная канавка, причем указанная прямоугольная канавка имеет дно, которое позволяет внутренней шестигранной потайной головке проходить через отверстие I.
На четырех вершинах прямоугольной канавки выполнено 3/4 цилиндрических канавок.
Указанный Ζ-образный удлинительный хвостовик имеет в целом Ζ-образную конструкцию, причем в Ζ-образном удлинительном хвостовике выполнены два резьбовых отверстия В, соответствующих сопрягаемым поверхностям установочного основания, причем резьбовые отверстия В соответствуют внутренним сквозным отверстиям с шестигранной потайной головкой I в поверхности канавки установочного основания, и установочное основание с Ζ-образным удлинительным хвостовиком скреплены друг с другом с помощью болтов.
Два угла Ζ-образного удлинительного хвостовика являются тупыми углами.
Зажимная канавка для быстрого позиционирования, соответствующая средней вертикальной секции стопора, расположена перед Z-образным концом Z-образного удлинительного хвостовика.
Над Z-образным концом Z-образного удлинительного хвостовика выполнено резьбовое отверстие I, стопор имеет резьбовое отверстие II, соответствующее резьбовому отверстию I, стопор и Z-образный удлинительный хвостовик скреплены посредством резьбового отверстия I, резьбового отверстия II и болтов.
Стопор также имеет Ζ-образную форму, причем угол изгиба стопора является прямым углом.
Внешняя поверхность Ζ-образного удлинительного хвостовика снабжена двумя расположенными в шахматном порядке полукруглыми выемками I, внешняя поверхность стопора также снабжена двумя расположенными в шахматном порядке полукруглыми выемками II, при этом полукруглые выемки I и II расположены не на одной и той же горизонтальной плоскости; кроме того первая полукруглая выемка I и вторая полукруглая выемка II совместно обеспечивают возможность позиционирования Ζ-образного режущего направляющего устройства.
Кроме того, в настоящей заявке охарактеризован ортопедический хирургический робот, содержащий механическую руку и описанное выше ортопедическое Ζ-образное режущее направляющее устройство, причем механическая рука имеет активный и пассивный режимы работы, а Z-образное режущее направляющее устройство ортопедического хирургического робота выполнено с возможность приведения его в действие при помощи взаимного переключения двух режимов для точного позиционирования режущей поверхности.
По сравнению с предшествующим уровнем техники, настоящая группа изобретений имеет следующие преимущества. Передняя поверхность установочного фланца для быстрого монтажа согласно настоящему изобретению выполнена в форме равнобедренного треугольника, вершины которого образованы тремя сквозными отверстиями, в отличие от равнобедренного треугольника отверстия под штифт, и сопряжение между установочным фланцем для быстрой установки и концом механической руки зафиксировано с помощью болта, проходящего через сквозное отверстие, так что усилие поддерживается равномерным, и пространство на верхней поверхности установочного фланца для быстрой установки может быть в достаточной степени сэкономлено. В соответствии с настоящей группой изобретений два угла Ζ-образного удлинительного хвостовика являются тупыми углами, и Z-образное режущее направляющее устройство может быть достаточно увеличено, оставляя больше пространства для манипулирования для оператора. В соответствии с настоящим изобретением, когда стопор перемещается в положение блокировки, стопор перемещается в положение разблокировки, и, таким образом, предотвращается перемещение стопора в положение разблокировки. В настоящем изобретении предлагается устройство для удаления кости, которое может быть использовано для удаления кости, и которое имеет простую конструкцию и высокую надежность, что позволяет оператору работать в более оптимальном режиме за счет переключения активного и пассивного режимов работы манипулятора. Краткое описание чертежей
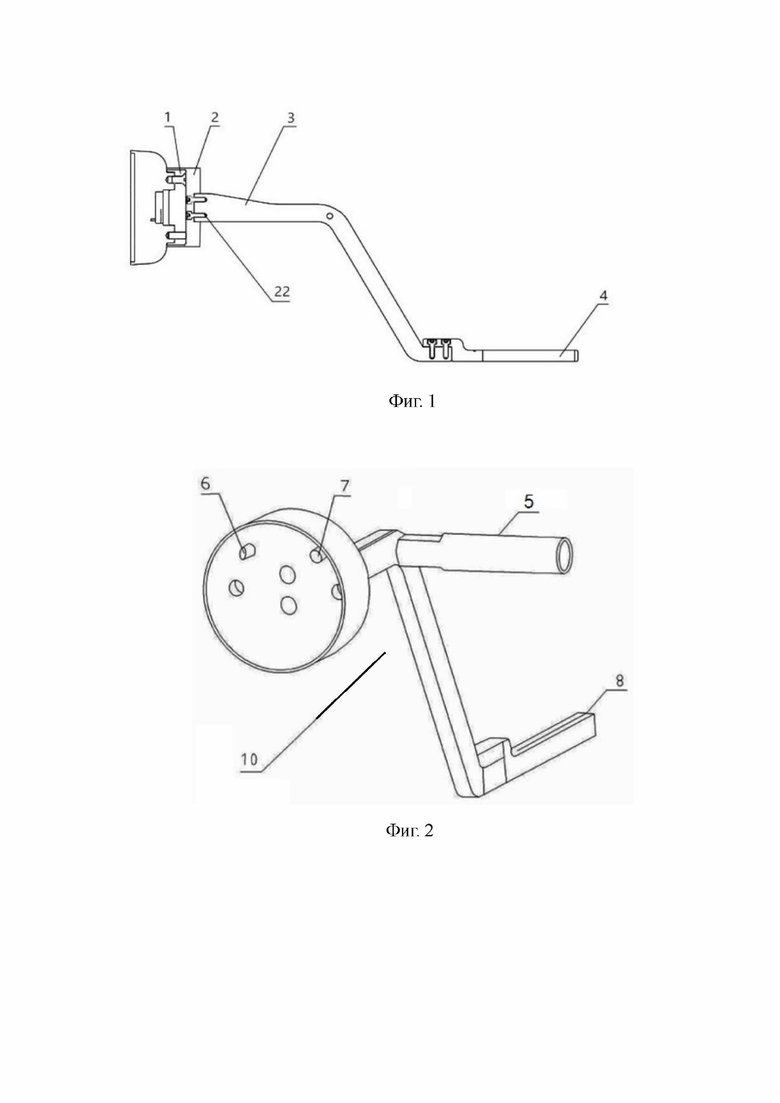
Фиг. 1 - изображение Z-образного режущего направляющего устройства согласно настоящей заявке;
Фиг. 2 - изометрическое изображение Z-образного режущего направляющего устройства согласно настоящей заявке;
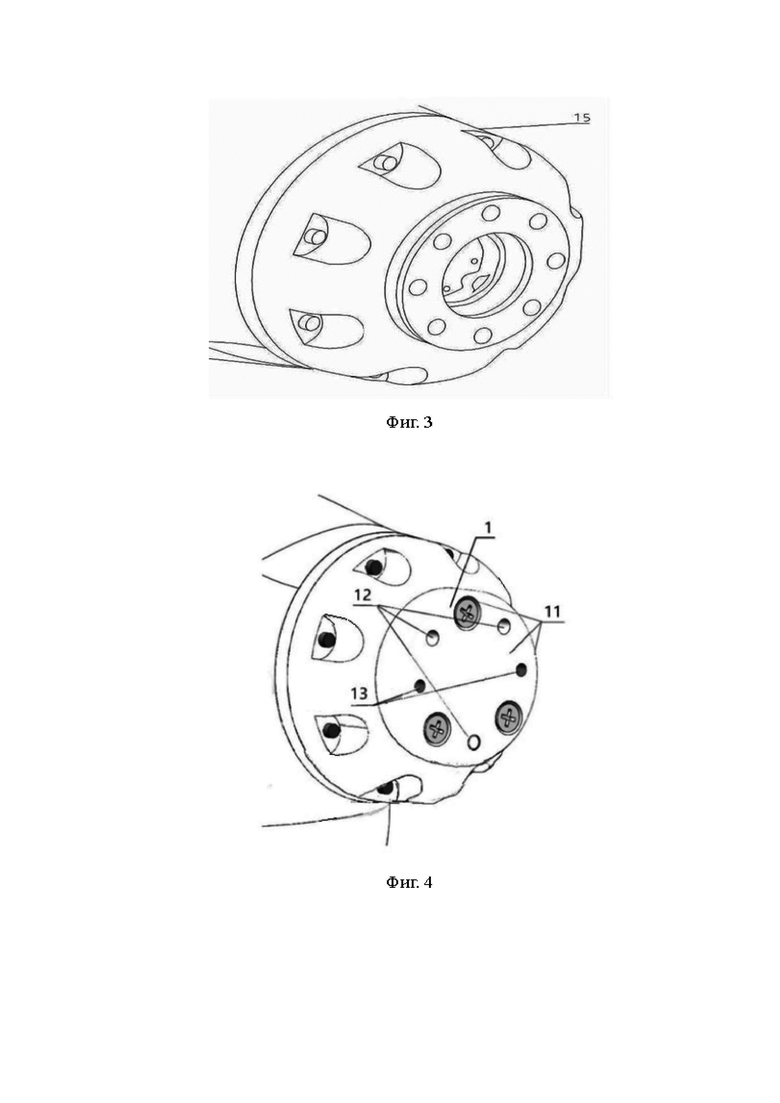
Фиг. 3 - изображение концевой части с местом стыковки механической руки ортопедического хирургического робота согласно настоящей заявке;
Фиг. 4 - изображение конструкции механической руки робота для ортопедических операций после того, как механическая рука и быстро устанавливаемый фланец были расположены и соединены друг с другом;
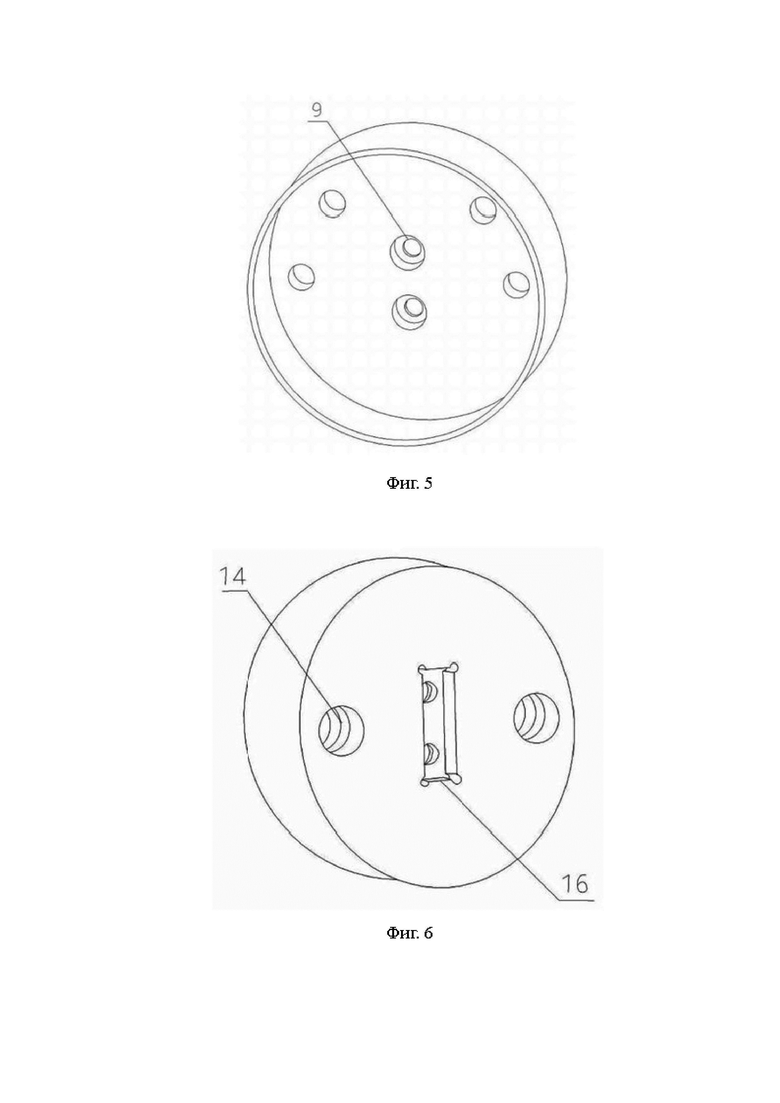
Фиг. 5 - поверхность с углублением установочного основания, согласно настоящему изобретению;
Фиг. 6 - передняя поверхность установочного основания согласно настоящему изобретению;
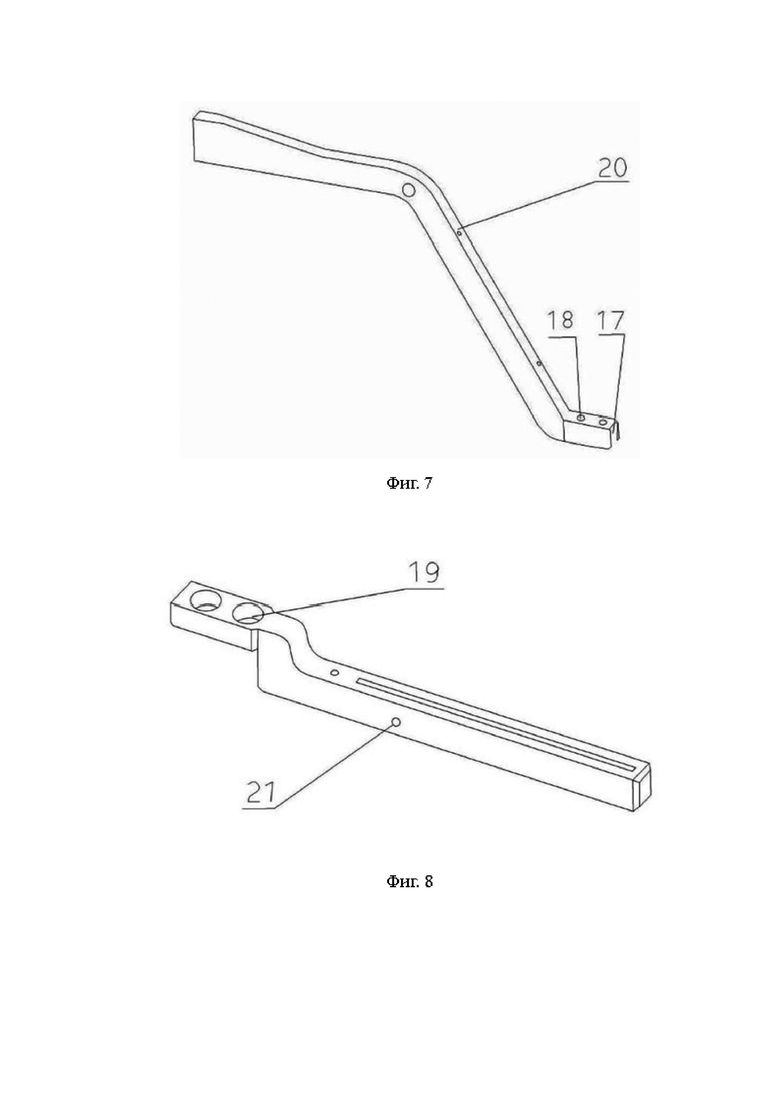
Фиг. 7 - схематический вид Ζ-образного удлинительного хвостовика, согласно настоящему изобретению;
Фиг. 8 - конструкция удерживающего стопора, согласно настоящему изобретению; На чертежах отображены следующие конструктивные элементы: 1 - быстро установочный фланец; 2 - установочное основание; 3 - Ζ-образный удлинительный хвостовик; 4 - стопор; 5 - хвостовик перемещения; 6 - алмазный штифт; 7 - цилиндрический штифт; 8 - направляющая канавка; 9 - сквозное отверстие I с шестигранной потайной головкой внутри; 10 - ортопедическое Ζ-образное направляющее устройство для резки; 11 - сквозное отверстие II с шестигранной потайной головкой внутри; 12 - отверстие под штифт; 13 - резьбовое отверстие А; 14 - сквозное отверстие с шестигранной потайной головкой внутри; 15 - механическая рука робота; 16 - прямоугольная канавка; 17 - зажимная канавка для быстрого позиционирования; 18 - резьбовое отверстие I; 19 - резьбовое отверстие II; 20 - полукруглая выемка I; 21 - полукруглая выемка II; 22 - резьбовое отверстие В.
Конкретные варианты осуществления изобретения
Далее настоящее изобретение будет описано подробно со ссылкой на чертежи и конкретные варианты осуществления.
Как показано на фиг.1 и 2, ортопедическое Ζ-образное режущее направляющее устройство 10 в соответствии с настоящим изобретением содержит быстро установочный фланец 1, установочное основание 2, Ζ-образный удлинительный хвостовик 3 и стопор 4, причем один конец быстро устанавливаемого фланца 1 закреплен на конце механической руки 15 робота и быстро устанавливается посредством установочной конструкции, другой конец быстро устанавливаемого фланца 1 закреплен на установочном основании 2, Ζ-образный удлинительный хвостовик 3 жестко соединен с установочным основанием 2, конец Ζ-образного удлинительного хвостовика 3 жестко соединен со стопором 4, а стопор 4 имеет направляющую канавку 8, которая немного шире, чем лезвие пилы, совершающей круговое движение, и которая обеспечивает прохождение лезвия.
Для облегчения быстрого перемещения режущего и направляющего устройства 10, выполненного в виде Ζ-образного элемента, оператором на расширяющемся в виде Ζ-образного удлинительного хвостовика 3 посредством резьбы закреплен хвостовик 5 для перемещения.
Как показано на фиг. 3 и 4, быстро установочный фланец 1 содержит канавку, которая сама по себе является цилиндрической, и средства позиционирования включают в себя три отверстия 12 для штифтов, которые выполнены на передней поверхности быстро установочного фланца 1, причем три отверстия 12 для штифтов расположены друг относительно друга в виде вершин равнобедренного треугольника и соответствуют штифтам для быстрой установки, цилиндрическим штифтам 6 и алмазным штифтам 7, соответственно. Быстро установленные штифты расположены на вершинах, обеспечивая точную посадку с натягом быстро установленного фланца 1 и механической руки 15 робота. Цилиндрический штифт 6 и алмазный штифт 7 установлены в двух отверстиях для штифтов, выполненных в нижней стороне, соответственно, а установочное основание 2 быстро устанавливается с использованием принципа установки с двумя штифтами на одной поверхности.
Передняя поверхность монтажного фланца 1 также имеет форму равнобедренного треугольника, противоположного равнобедренному треугольнику с вершинами отверстий под штифт, и состоит из трех сквозных отверстий 11 в вершинах треугольника, через которые соответственно проходят три болта, чтобы закрепить стык монтажного фланца 1 и конца механической руки 15 робота, и может сохранять равномерную нагрузку, при этом сохраняя достаточное пространство на верхней поверхности установочного фланца 1.
Передняя поверхность установочного фланца 1 также имеет два резьбовых отверстия А 13 для крепления установочного основания 2 к установочному фланцу 1.
Три отверстия 12 под штифты, три сквозных отверстия 11 с потайной головкой и два резьбовых отверстия А 13 на лицевой поверхности установочного фланца 1 лежат на одной окружности. Угол между любыми соседними отверстиями, т.е. отверстием 12 под штифт, сквозным отверстием 11 с потайной головкой и резьбовым отверстием А 13, составляет 45°, что позволяет сократить число операций при механической обработке и одновременно обеспечить ее точность.
Как показано на фиг.5 и 6, основание 2 имеет по существу такую же форму, что и фланец 1 для быстрой установки, и жестко соединено с фланцем 1 для быстрой установки, на поверхности паза основания 2 имеются два отверстия для штифтов, которые соответственно посажены с натягом на цилиндрический штифт и алмазный штифт, при этом угол между двумя отверстиями для штифтов и центром окружности основания 2 составляет 90°, что позволяет использовать отверстие для штифта на передней поверхности фланца 1 для быстрой установки.
Поверхность с канавкой установочного основания 2 снабжена двумя сквозными отверстиями 9 с внутренней шестигранной головкой, предназначенными для взаимодействия с болтами с внутренней шестигранной головкой для крепления удлинительного хвостовика 3, имеющего Ζ-образную форму, к установочному основанию 2. На передней поверхности установочного основания 2 выполнены два сквозных отверстия 14 с шестигранным углублением, и на передней поверхности сквозные отверстия 14 с шестигранным углублением прикрепляют установочное основание 2 к концевой части с местом стыковки механической руки робота 15 с помощью болтов. Резьбовые первое (9) и второе (14) отверстия с шестигранной потайной головкой выполнены противоположными, при этом линии, на которых лежат пары сквозных первых (9) и вторых (14) отверстий с шестигранной потайной головкой, расположены под углом 90° друг к другу. Передняя сторона указанного установочного основания 2 также имеет прямоугольную канавку 16, причем нижняя часть указанной прямоугольной канавки 16 позволяет проходить через нее сквозному отверстию 9 с внутренней шестигранной потайной головкой. Четыре вершины прямоугольного углубления 16 снабжены 3/4 цилиндрическими углублениями, поскольку углы в процессе фрезерования могут быть только приблизительно одинаковыми, и недостатки, связанные с обработкой под прямым углом, можно устранить с помощью 3/4 цилиндрических углублений. Это способствует быстрому позиционированию Ζ-образного удлинительного хвостовика 3 с установочным основанием 2.
Как показано на фиг.7 и 8, Ζ-образный установочный хвостовик 3 имеет в целом Ζ-образную конструкцию, и его поверхность, взаимодействующая с установочным основанием 2, снабжена двумя резьбовыми отверстиями В 22, причем резьбовые отверстия В 22 соответствуют сквозным отверстиям 9 с шестигранной потайной головкой установочного основания 2 и зафиксированы болтом. Два угла Ζ-образного удлинительного хвостовика 3 являются тупыми углами, достаточно для расширения всей Ζ-образного режущего направляющего устройства, оставляя больше пространства для оператора. Зажимная канавка для быстрого позиционирования 17, соответствующая средней вертикальной секции стопора 4, расположена перед Z-образным концом Ζ-образного удлинительного хвостовика 3, чтобы обеспечить быструю установку в определенном месте стопора 4 и Ζ-образного удлинительного хвостовика 3.
Над Ζ-образным удлинительным хвостовиком 3 выполнено резьбовое отверстие 18, на стопоре 4 выполнено резьбовое отверстие 19, соответствующее положению резьбового отверстия 18, а стопор 4 и Ζ-образный удлинительный хвостовик 3 зафиксированы с помощью болта, проходящего через резьбовое отверстие 18 и резьбовое отверстие 19.
Стопор 4 также имеет Ζ-образную форму, причем углы их сгиба являются прямыми углами.
Внешняя поверхность Ζ-образного удлинительного хвостовика 3 снабжена двумя расположенными со смещением полукруглыми выемками 20, внешняя поверхность стопора 4 также снабжена двумя расположенными со смещением полукруглыми выемками 21, причем полукруглые выемки 20 и 21 не расположены на одной горизонтальной плоскости. Позиционирование Ζ-образного режущего направляющего устройства осуществляется совместно с полукруглыми выемками 20 и двумя полукруглыми выемками 21. Во время позиционирования положение Ζ-образного режущего направляющего устройства во всем пространстве определяется путем использования положения измерительного наконечника до положения первой полукруглой выемки 20 и второй полукруглой выемки 21, затем путем считывания положения измерительного наконечника с помощью бинокулярного визуального устройства и затем путем изменения положения.
Кроме того, в настоящей заявке предложен ортопедический робот, содержащий механическую руку 15 и описанное выше ортопедическое Ζ - образное режущее направляющее устройство 10, причем механическая рука 15 выполнена с возможностью переключения между активным и пассивным режимами и приведения в действие указанного ортопедического робота 10 путем переключения между указанными режимами. Например, в пассивном режиме рука робота вручную перемещается в область вблизи рабочего положения, затем переключают в активный режим, позволяя руке робота перемещаться по алгоритму, обеспечивая точное позиционирование плоскости среза. Таким образом, оператор может работать в более удобном режиме, а устройства имеют простую конструкцию и высокую надежность.
Промышленная применимость
При использовании ортопедического хирургического робота согласно настоящей заявке, Ζ-образное режущее направляющее устройство 10 устанавливается вышеописанным способом, затем положение для резания определяется с использованием паза стопора 4, и оператор может регулировать скорость и глубину разреза после размещения лезвия пилы вдоль канавки стопора 4, и после этого оператор может извлекать маятниковую пилу и устанавливать механическую руку 15 в безопасное положение.
Конструктивные особенности и преимущества настоящего изобретения включают следующие. На передней поверхности установочного фланца для быстрого монтажа предусмотрены три отверстия под штифты и три отверстия с потайными головками, при этом линии соединения между тремя отверстиями под штифты образуют равнобедренный треугольник, противоположный линиям соединения между тремя отверстиями с потайными головками, отверстия под штифты выполнены соответственно с возможностью взаимодействия с быстро устанавливающими штифтами, цилиндрическими штифтами и алмазными штифтами для быстрой установки установочного основания, а быстро установочный фланец и концевая часть с местом стыковки механической руки зафиксированы с помощью болтов, проходящих через сквозные отверстия с потайной головкой, при этом усилия распределяются равномерно, и пространство на верхней поверхности установочного фланца для быстрого монтажа существенно сэкономлено. Два угла Ζ-образного удлинительного хвостовика являются тупыми углами, чтобы полностью раздвинуть Ζ-образную режущую направляющую, оставляя больше пространства для оператора. В то же время перед Ζ-образным удлинительным хвостовиком имеется зажимная канавка для быстрого позиционирования, позволяющая быстро позиционировать стопор относительно Ζ-образного удлинительного хвостовика. В настоящем изобретении предлагается устройство, которое может быть использовано для удаления кости, и которое имеет простую конструкцию и высокую надежность, что позволяет оператору работать в более оптимальном режиме за счет переключения активного и пассивного режимов работы механической руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ортопедический трансформер | 2017 |
|
RU2687610C2 |
| СИСТЕМА ОРТОПЕДИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ДЛЯ ХИРУРГИЧЕСКОЙ ПОДГОТОВКИ БЕДРЕННОЙ КОСТИ ПАЦИЕНТА | 2017 |
|
RU2740729C2 |
| СИСТЕМА И СПОСОБ ПОДГОТОВКИ БЕДРЕННОЙ КОСТИ ПАЦИЕНТА ПРИ ПРОВЕДЕНИИ ОРТОПЕДИЧЕСКОЙ ОПЕРАЦИИ ПО ЭНДОПРОТЕЗИРОВАНИЮ СУСТАВА | 2017 |
|
RU2744481C2 |
| РЕЗЦЕДЕРЖАТЕЛЬ | 2007 |
|
RU2443512C2 |
| СИСТЕМА ДЛЯ ПОДГОТОВКИ БОЛЬШЕБЕРЦОВОЙ КОСТИ ПАЦИЕНТА ПРИ ПРОВЕДЕНИИ ОРТОПЕДИЧЕСКОЙ ОПЕРАЦИИ ПО ЭНДОПРОТЕЗИРОВАНИЮ СУСТАВА | 2017 |
|
RU2742969C2 |
| СПОСОБ И ИНСТРУМЕНТЫ ДЛЯ СБОРКИ ОРТОПЕДИЧЕСКОГО ПРОТЕЗА | 2018 |
|
RU2772936C2 |
| Способ и инструменты для сборки бедренного ортопедического протеза | 2018 |
|
RU2772934C2 |
| Ортопедический трансформер | 2017 |
|
RU2680593C1 |
| СБОРНЫЙ ОТРЕЗНОЙ РЕЗЕЦ И РЕЖУЩИЕ ПЛАСТИНЫ К НЕМУ | 2007 |
|
RU2366542C2 |
| Фрезерный рабочий орган к станку | 1984 |
|
SU1299486A3 |
Группа изобретений относится к медицинской технике. Ортопедическое Z-образное режущее направляющее устройство содержит установочный фланец, установочное основание , Z-образный удлинительный хвостовик и стопор. Один конец установочного фланца прикреплен к концу механической руки и обеспечивает возможность установки посредством установочной конструкции, другой конец установочного фланца прикреплен к установочному основанию. Z-образный удлинительный хвостовик неподвижно прикреплен к установочному основанию, конец Z-образного удлинительного хвостовика неподвижно прикреплен к стопору, а центральная часть стопора имеет направляющую канавку, более широкую, чем лезвие вибрационной пилы, что обеспечивает возможность прохода лезвия через направляющую канавку. Установочное основание имеет такую же форму, как и установочный фланец, а в поверхности канавки установочного основания выполнены два отверстия для штифтов, которые установлены с натягом на цилиндрический штифт и алмазный штифт. Угол между линиями, на которых лежат два отверстия для штифтов, и центром окружности установочного основания составляет 90°. Раскрыт ортопедический хирургический робот, содержащий механическую руку и ортопедическое Z-образное режущее направляющее устройство. Технический результат состоит в обеспечении удобства работы оператора. 2 н. и 16 з.п. ф-лы, 8 ил.
1. Ортопедическое Z-образное режущее направляющее устройство, содержащее установочный фланец (1), установочное основание (2), Z-образный удлинительный хвостовик (3) и стопор (4), отличающееся тем, что один конец установочного фланца (1) прикреплен к концу механической руки и обеспечивает возможность установки посредством установочной конструкции, другой конец установочного фланца (1) прикреплен к установочному основанию (2), Z-образный удлинительный хвостовик (3) неподвижно прикреплен к установочному основанию (2), конец Z-образного удлинительного хвостовика (3) неподвижно прикреплен к стопору (4), а центральная часть стопора (4) имеет направляющую канавку, более широкую, чем лезвие вибрационной пилы, что обеспечивает возможность прохода лезвия через направляющую канавку (4);
при этом установочное основание (2) имеет такую же форму, как и установочный фланец (1), а в поверхности канавки установочного основания (2) выполнены два отверстия для штифтов, которые установлены с натягом на цилиндрический штифт (7) и алмазный штифт (6), причем угол между линиями, на которых лежат два отверстия для штифтов, и центром окружности установочного основания (2) составляет 90°.
2. Ортопедическое Z - образное режущее направляющее устройство по п. 1, отличающееся тем, что на Z - образном удлинительном хвостовике (3) с помощью резьбы закреплен хвостовик (5) перемещения.
3. Ортопедическое Z-образное режущее направляющее устройство по п. 1 или 2, отличающееся тем, что указанный фланец (1) имеет канавки, а установочная конструкция содержит три отверстия (12) для штифтов, которые выполнены на передней поверхности фланца (1), при этом три отверстия (12) для штифтов расположены относительно друг друга в виде вершин равнобедренного треугольника и соответствуют установочным штифтам, цилиндрическим штифтам (7) и алмазным штифтам (6), при этом отверстия для штифтов в вершинах треугольника предназначены для посадки с натягом установочного фланца (1) и установочного штифта концевой части с местом стыковки механической руки, а два отверстия для штифтов на нижней стороне соответствуют цилиндрическим штифтам (7) и алмазным штифтам (6).
4. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-3, отличающееся тем, что на передней поверхности установочного фланца (1) имеются три сквозных отверстия (11) с потайными головками болтов, расположенных относительно друг друга в виде вершин равнобедренного треугольника, который противоположен равнобедренному треугольнику, образованному тремя отверстиями (12) для штифтов, а установочный фланец (1) и концевая часть механической руки (15) зафиксированы тремя потайными болтами, проходящими через три сквозных отверстия (11) с потайными головками болтов.
5. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-4, отличающееся тем, что передняя поверхность установочного фланца (1) также имеет два резьбовых отверстия А (13) для крепления установочного основания (2) к установочному фланцу (1).
6. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-5, отличающееся тем, что три отверстия (12) под штифты, три сквозных отверстия (11) с потайными головками болтов и два резьбовых отверстия А (13) на передней поверхности установочного фланца (1) лежат на одной окружности под углом 45° относительно друг друга.
7. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-6, отличающееся тем, что поверхность канавки установочного основания (2) имеет два болта для фиксации Z-образного удлинительного хвостовика (3) через отверстие I (9) установочного основания (2).
8. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-7, отличающееся тем, что два сквозных отверстия (14) с внутренними шестигранными потайными головками болтов выполнены на передней поверхности установочного основания (2), при этом два сквозных отверстия (14) с внутренними шестигранными потайными головками болтов закрепляют установочное основание (2) на концевой части с местом стыковки механической руки (15) с помощью болтов, закрепленных в сквозных отверстиях II (14) с потайными шестигранными головками болтов.
9. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-8, отличающееся тем, что резьбовые первое (9) и второе (14) отверстия с шестигранными потайными головками болтов выполнены противоположными, при этом линии, на которых лежат пары сквозных первых (9) и вторых (14) отверстий с шестигранными потайными головками болтов, расположены под углом 90° друг к другу.
10. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-9, отличающееся тем, что на передней поверхности указанного установочного основания (2) выполнена прямоугольная канавка (16), причем указанная прямоугольная канавка (16) имеет дно, которое позволяет проходить через него отверстию I (9).
11. Ортопедическое Z-образное режущее направляющее устройство по п. 10, отличающееся тем, что в четырех вершинах прямоугольной канавки (16) выполнены 3/4 цилиндрических канавок.
12. Ортопедическое Z-образное режущее направляющее устройство по п. 7, отличающееся тем, что указанный Z-образный удлинительный хвостовик (3) имеет в целом Z-образную конструкцию, причем в Z-образном удлинительном хвостовике (3) выполнены два резьбовых отверстия В (22), соответствующих сопрягаемым поверхностям установочного основания (2), причем резьбовые отверстия В (22) соответствуют внутренним сквозным отверстиям I (9) с шестигранными потайными головками болтов в поверхности канавки установочного основания (2), и установочное основание (2) с Z-образным удлинительным хвостовиком (3) скреплены друг с другом с помощью болтов.
13. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-12, отличающееся тем, что два угла Z-образного удлинительного хвостовика (3) являются тупыми углами.
14. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-13, отличающееся тем, что зажимная канавка для позиционирования, соответствующая средней вертикальной секции стопора (4), расположена перед Z-образным концом Z-образного удлинительного хвостовика (3).
15. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-14, отличающееся тем, что над Z-образным концом Z-образного удлинительного хвостовика (3) выполнено резьбовое отверстие I (18), стопор (4) имеет резьбовое отверстие II (19), соответствующее резьбовому отверстию I (18), стопор (4) и Z-образный удлинительный хвостовик (3) скреплены посредством резьбового отверстия I (18), резьбового отверстия II (19) и болтов.
16. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-14, отличающееся тем, что стопор (4) также имеет Z-образную форму, причем угол изгиба стопора (4) является прямым углом.
17. Ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-14, отличающееся тем, что внешняя поверхность Z-образного удлинительного хвостовика (3) снабжена двумя расположенными в шахматном порядке полукруглыми выемками I (20), внешняя поверхность стопора (4) также снабжена двумя расположенными в шахматном порядке полукруглыми выемками II (21), при этом полукруглые выемки I (20) и II (21) расположены не на одной и той же горизонтальной плоскости; кроме того, первая полукруглая выемка I (20) и вторая полукруглая выемка II (21) совместно обеспечивают возможность позиционирования Z-образного режущего направляющего устройства.
18. Ортопедический хирургический робот, содержащий механическую руку (15) и ортопедическое Z-образное режущее направляющее устройство по любому из пп. 1-17, причем механическая рука выполнена с возможностью работы в активном и пассивном режимах, а Z-образное режущее направляющее устройство ортопедического хирургического робота выполнено с возможностью приведения его в действие при помощи переключения между активным и пассивным режимами для позиционирования режущей поверхности.
| ИНСТРУМЕНТЫ И СПОСОБЫ ДОСТАВКИ НИТИ ДЛЯ ЭНДОСКОПИЧЕСКОЙ И РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2011 |
|
RU2568538C2 |
| US 5571110 A1, 05.11.1996 | |||
| CN 108135660 A, 08.06.2018 | |||
| CN 108635045 A, 12.10.2018 | |||
| CN 110023729 A, 16.07.2019. | |||

