Изобретение относится к радиолокации и может быть использовано для разработки и модернизации устройств обработки фазоманипулированных радиолокационных сигналов, а также сложных сигналов с другими видами внутриимпульсной модуляции, например, частотно-модулированных радиолокационных сигналов, обеспечивающих, наряду с возможностью уменьшения импульсной мощности передатчика, повышение энергетического потенциала и улучшение ряда тактико-технических характеристик первичных радиолокационных станций (РЛС), в т.ч. увеличение максимальной дальности действия, повышение точности и разрешающей способности по дальности.
Требуемые величины максимальной дальности действия, точность и разрешающая способность по дальности являются основными факторами при выборе зондирующих сигналов РЛС. При уменьшении длительности зондирующих импульсов улучшается разрешающая способность по дальности. Однако при этом уменьшается энергия зондирующих импульсов, что приводит к уменьшению дальности действия РЛС и точности измерения дальности.
Для преодоления этого противоречия в первичных РЛС используют длинные (до десятков микросекунд) сложные зондирующие радиоимпульсы с внутриимпульсной модуляцией и последующей обработкой (сжатием) отраженных сигналов. Большая длительность импульса обеспечивает энергию сигнала, необходимую для обнаружения целей, а внутриимпульсная модуляция и сжатие - необходимую точность измерения дальности и заданное разрешение по дальности.
В настоящее время широкое распространение получили сигналы с фазовой манипуляцией (ФМ). Сжатие таких сигналов осуществляется при помощи оптимальных (согласованных) или подоптимальных фильтров [1].
Многоканальное устройство обработки фазоманипулированных радиолокационных сигналов является составной частью приемо-передающего тракта РЛС и обеспечивает когерентное накопление, доплеровскую фильтрацию и сжатие ФМ сигнала при повышенной устойчивости к воздействию пассивных и активных помех.
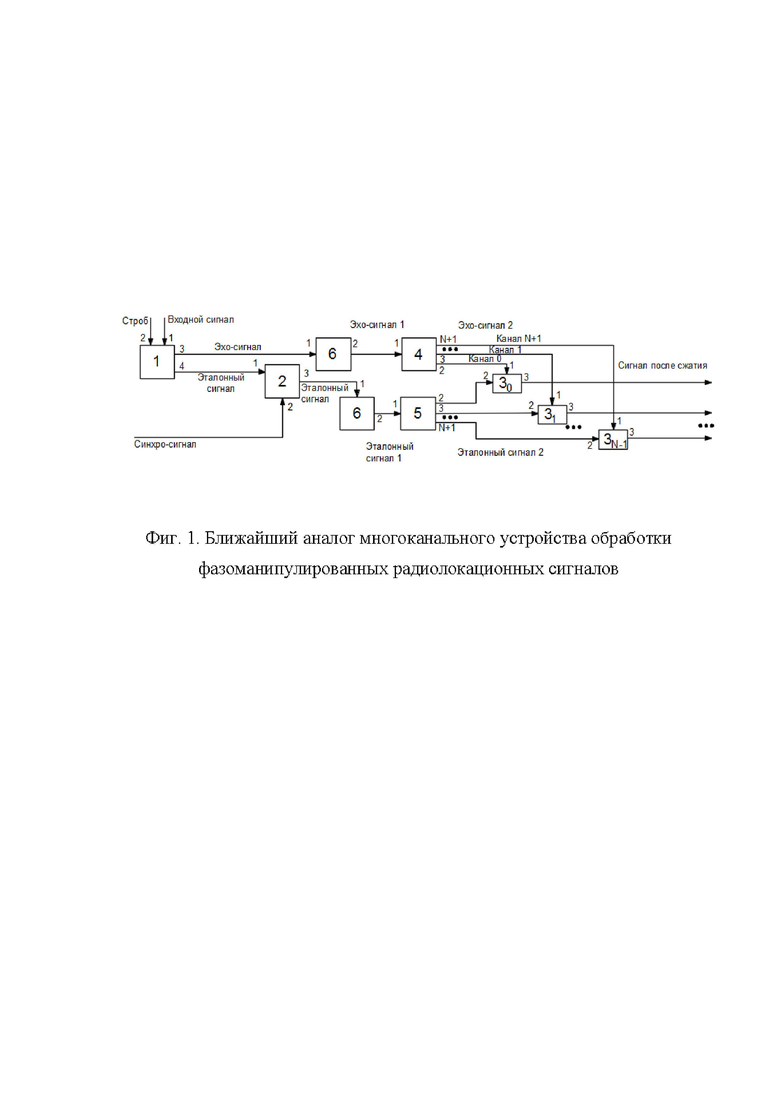
Наиболее близким по технической сущности к предлагаемому устройству является устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов, выбранное в качестве прототипа [2] (фиг. 1), содержащее схему стробирования (1), запоминающее устройство (2), подоптимальные фильтры (30÷3N-1), где  - количество доплеровских каналов, блок доплеровского накопления (4), формирователь эталонного сигнала (5) и блоки весовой обработки (6) с соответствующими связями.
- количество доплеровских каналов, блок доплеровского накопления (4), формирователь эталонного сигнала (5) и блоки весовой обработки (6) с соответствующими связями.
При сжатии ФМ сигнала подавление боковых лепестков обеспечивается при соответствии спектра обрабатываемого сигнала коэффициенту передачи подоптимального фильтра устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов в спектральной области. Однако в реальной аппаратуре коэффициент передачи приемо-передающего тракта РЛС вносит искажения в спектр сигнала, что может привести к ухудшению характеристик его сжатия, проявляющемуся в увеличении уровня боковых лепестков, потерям и расширении длительности сжатого сигнала.
С целью компенсации искажений ФМ сигнала импульсная характеристика (ИХ) подоптимального фильтра устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов формируется с использованием оценки параметров зондирующего сигнала, прошедшего через приемо-передающий тракт РЛС (эталонного сигнала), что позволяет автоматически подстраивать подоптимальный фильтр под искажения эхо-сигнала. При этом коэффициент передачи подоптимального фильтра в спектральной области соответствует спектру эхо-сигналов целей, т.к. эталонный и эхо-сигналы проходят через один и тот же приемо-передающий тракт.
Импульсная характеристика подоптимального фильтра при отсутствии доплеровского сдвига частоты имеет вид
 ,
,
где  - элементарный (немодулированный) импульс;
- элементарный (немодулированный) импульс;
 - номер дискреты (отсчета) сигнала;
- номер дискреты (отсчета) сигнала;
 - количество дискрет в одном элементе ФМ сигнала;
- количество дискрет в одном элементе ФМ сигнала;
 - дельта-функция;
- дельта-функция;
 и
и  - операторы соответственно прямого и обратного дискретных преобразований Фурье;
- операторы соответственно прямого и обратного дискретных преобразований Фурье;
 - ИХ кодирующего фильтра;
- ИХ кодирующего фильтра;  ;
;
 - количество элементов ФМ сигнала.
- количество элементов ФМ сигнала.
Доплеровский набег фазы принятого сигнала за время  , равное длительности одного элемента ФМ сигнала, определяется выражением
, равное длительности одного элемента ФМ сигнала, определяется выражением
 ,
,
где  - доплеровский набег фазы принятого сигнала;
- доплеровский набег фазы принятого сигнала;
- длительность одного элемента ФМ сигнала;
 - доплеровский сдвиг частоты;
- доплеровский сдвиг частоты;
 - длина волны излучаемого сигнала;
- длина волны излучаемого сигнала;
 - радиальная скорость движения цели.
- радиальная скорость движения цели.
Импульсная характеристика подоптимального фильтра с учетом доплеровского сдвига частоты имеет вид
 ,
,
где  - период дискретизации сигнала;
- период дискретизации сигнала;
 - мнимая единица;
- мнимая единица;
 - символ свертки.
- символ свертки.
На вход 1 схемы стробирования (1) с цифрового фазового детектора приемного тракта РЛС подается входной сигнал: в моменты времени, соответствующие излучению зондирующих импульсов, поступают отсчеты эталонного сигнала, в остальные моменты времени - отсчеты эхо-сигнала. На вход 2 схемы стробирования (1) с синхронизатора в моменты времени, соответствующие излучению зондирующих импульсов, поступает сигнал Строб. При этом с выхода 4 схемы стробирования (1) эталонный сигнал поступает на вход 1 запоминающего устройства (2) и записывается в запоминающее устройство (2) по синхросигналу, поступающему на вход 2 запоминающего устройства (2).
В остальные моменты времени с выхода 3 схемы стробирования (1) эхо-сигнал поступает на блок весовой обработки (6). С выхода блока весовой обработки (6) эхо-сигнал 1 поступает на блок доплеровского накопления (4). С выходов 2÷(N+1) блока доплеровского накопления (4) на входы 1 подоптимальных фильтров 30÷3N-1, образующих N доплеровских каналов, поступает эхо-сигнал 2.
Каждый доплеровский канал настроен на эхо-сигналы с доплеровским сдвигом частоты, равным
 ,
,
где  - доплеровский сдвиг частоты, соответствующий
- доплеровский сдвиг частоты, соответствующий  -му доплеровскому каналу;
-му доплеровскому каналу;
 - доплеровский сдвиг частоты, соответствующий (N-1)-му доплеровскому каналу;
- доплеровский сдвиг частоты, соответствующий (N-1)-му доплеровскому каналу;
i=0÷(N-1) - номер доплеровского канала.
Эталонный сигнал, записанный в запоминающее устройство (2), поступает в виде запомненного эталонного сигнала на выход 3 запоминающего устройства (2). Запомненный эталонный сигнал поступает с выхода 3 запоминающего устройства (2) на блок весовой обработки (6). С выхода блока весовой обработки (6) эталонный сигнал 1 без доплеровского сдвига частоты  поступает на вход 1 формирователя эталонного сигнала (5).
поступает на вход 1 формирователя эталонного сигнала (5).
С выходов 2÷(N+1) формирователя эталонного сигнала (5) на входы 2 подоптимальных фильтров 30÷3N-1, образующих доплеровских каналов, поступает эталонный сигнал 2
доплеровских каналов, поступает эталонный сигнал 2
 ,
,
где  - эталонный сигнал 2 в
- эталонный сигнал 2 в  -м доплеровском канале;
-м доплеровском канале;
i=0÷(N-1),
- эталонный сигнал 1 без доплеровского сдвига частоты.
В каждом подоптимальном фильтре 30, 31, …, 3N-1 выполняется сжатие эхо-сигнала 2 из  -го доплеровского канала с эталонным сигналом 2, соответствующим доплеровскому сдвигу частоты
-го доплеровского канала с эталонным сигналом 2, соответствующим доплеровскому сдвигу частоты  .
.
Использование  подоптимальных фильтров позволяет выполнять сжатие ФМ сигнала с учетом доплеровского сдвига частоты, что обеспечивает сохранение характеристик эффективности сжатия сигналов, отраженных от движущихся летательных аппаратов (ЛА).
подоптимальных фильтров позволяет выполнять сжатие ФМ сигнала с учетом доплеровского сдвига частоты, что обеспечивает сохранение характеристик эффективности сжатия сигналов, отраженных от движущихся летательных аппаратов (ЛА).
Импульсная характеристика подоптимальных фильтров 30, 31, …, 3N-1 с учетом доплеровского сдвига частоты имеет вид
 ,
,
где i=0÷(N-1).
В блоке доплеровского накопления (4) по каждому из элементов дальности осуществляется - точечное дискретное преобразование Фурье (ДПФ). В результате этой процедуры, для каждого из элементов разрешения по дальности формируется массив, содержащий N спектральных линий доплеровской частоты. Из-за конечного количества точек ДПФ, в результате выполнения операции дискретного преобразования Фурье будут иметь место краевые эффекты. В результате эхо-сигнал 2 на выходах  блока доплеровского накопления (4) исказится, что приведет к снижению разрешающей способности по скорости. При этом сильный эхо-сигнал одного ЛА может исказить или полностью маскировать слабый эхо-сигнал другого ЛА (при попадании эхо-сигналов в один и тот же элемент разрешения по дальности).
блока доплеровского накопления (4) исказится, что приведет к снижению разрешающей способности по скорости. При этом сильный эхо-сигнал одного ЛА может исказить или полностью маскировать слабый эхо-сигнал другого ЛА (при попадании эхо-сигналов в один и тот же элемент разрешения по дальности).
Для уменьшения влияния краевых эффектов при выполнении операции ДПФ использованы блоки весовой обработки (6), реализующие функции весовых окон [3].
Выходы подоптимальных фильтров 30÷3N-1 являются выходами устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов.
До поступления на устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов эхо-сигнал и эталонный сигнал подвергаются фильтрации с использованием фильтра нижних частот (ФНЧ) (фиг. 2) с целью уменьшения влияния помех на эффективность обработки эхо-сигнала.
Однако, при наличии помех на частотах, близких к несущей частоте эхо-сигнала (между частотой пропускания  и частотой задерживания
и частотой задерживания  ФНЧ), подавление помехи произойдет в недостаточной мере.
ФНЧ), подавление помехи произойдет в недостаточной мере.
При этом, в частности, возрастет вероятность ложных тревог, что может привести к невыполнению требований к вероятности правильного обнаружения эхо-сигнала при заданной вероятности ложных тревог по критерию Неймана-Пирсона [1].
Уменьшение влияния помех на частотах, близких к несущей частоте эхо-сигнала может быть достигнуто путем уменьшения величины , при сохранении величины , определяемой полосой эхо-сигнала.
При этом возрастет крутизна спада амплитудно-частотной характеристики (АЧХ) ФНЧ (уменьшится ширина полосы частот  ). Однако повышение крутизны спада АЧХ ФНЧ достигается за счет повышения порядка ФНЧ, что во многих случаях может быть затруднительным.
). Однако повышение крутизны спада АЧХ ФНЧ достигается за счет повышения порядка ФНЧ, что во многих случаях может быть затруднительным.
Технической проблемой, решаемой изобретением, является создание многоканального устройства обработки фазоманипулированных радиолокационных сигналов с повышенной устойчивостью к воздействию помех на частотах, близких к несущей частоте эхо-сигнала.
Техническим результатом предлагаемого изобретения является повышение устойчивости к воздействию помех на частотах, близких к несущей частоте эхо-сигнала.
Технический результат достигается тем, что многоканальное устройство обработки фазоманипулированных радиолокационных сигналов, содержащее схему стробирования 1, запоминающее устройство 2,  подоптимальных фильтров 30÷3N-1, где - количество доплеровских каналов, блок доплеровского накопления 4, формирователь эталонного сигнала 5, 2 блока весовой обработки 6, принимающее входной сигнал 1 на несущей частоте
подоптимальных фильтров 30÷3N-1, где - количество доплеровских каналов, блок доплеровского накопления 4, формирователь эталонного сигнала 5, 2 блока весовой обработки 6, принимающее входной сигнал 1 на несущей частоте  , согласно изобретению дополнительно содержит устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72, принимающее входной сигнал 2 на частоте
, согласно изобретению дополнительно содержит устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72, принимающее входной сигнал 2 на частоте  , устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73, принимающее входной сигнал 3 на частоте
, устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73, принимающее входной сигнал 3 на частоте  , где , - частота пропускания фильтра нижних частот, - частота подавления фильтра нижних частот, и устройство сравнения амплитуд 8, причем выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 71 соединены со входами 10÷1N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72 соединены со входами 20÷2N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73 соединены со входами 30÷3N-1 устройства сравнения амплитуд 8.Введение новых блоков позволяет повысить устойчивость к воздействию пассивных и активных помех на частотах, близких к несущей частоте эхо-сигналов целей первичных РЛС.
, где , - частота пропускания фильтра нижних частот, - частота подавления фильтра нижних частот, и устройство сравнения амплитуд 8, причем выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 71 соединены со входами 10÷1N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72 соединены со входами 20÷2N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73 соединены со входами 30÷3N-1 устройства сравнения амплитуд 8.Введение новых блоков позволяет повысить устойчивость к воздействию пассивных и активных помех на частотах, близких к несущей частоте эхо-сигналов целей первичных РЛС.
Сущность изобретения поясняется фигурами:
Фиг. 1. Ближайший аналог многоканального устройства обработки фазоманипулированных радиолокационных сигналов,
Фиг. 2. Амплитудно-частотная характеристика фильтра низких частот,
Фиг. 3. Функциональная схема многоканального устройства обработки фазоманипулированных радиолокационных сигналов,
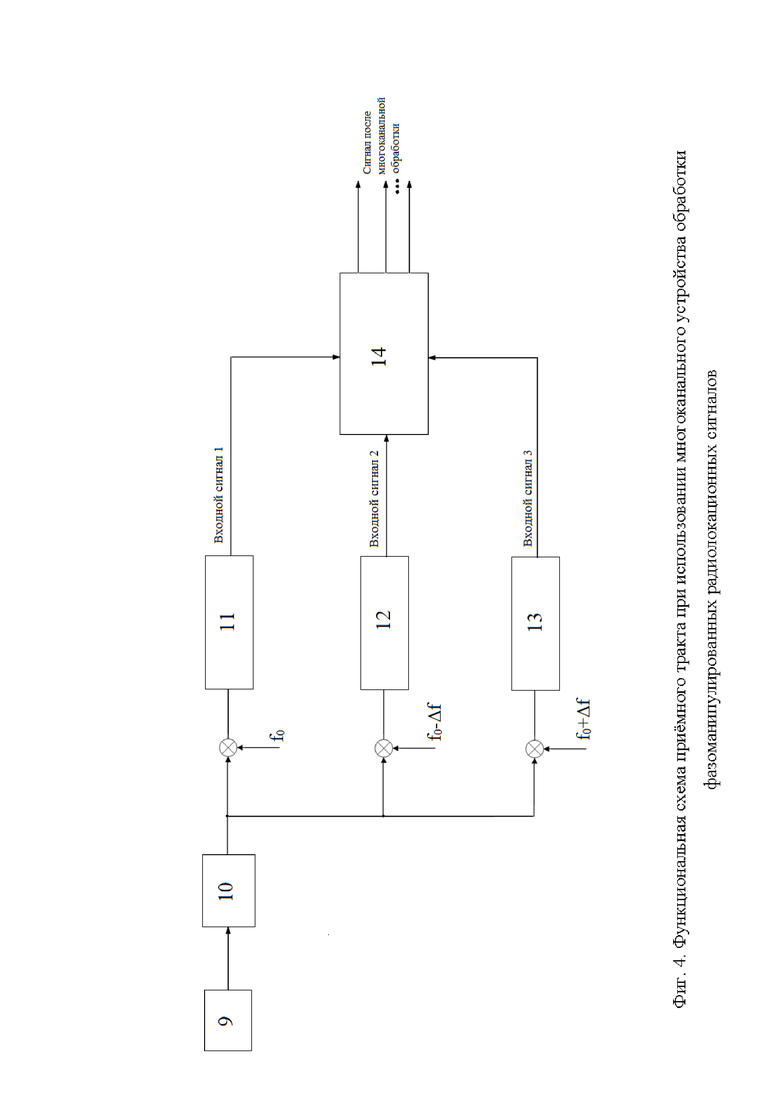
Фиг. 4. Функциональная схема приемного тракта при использовании многоканального устройства обработки фазоманипулированных радиолокационных сигналов.
На фигурах показаны следующие элементы:
1 - схема стробирования,
2 - запоминающее устройство,
3 - подоптимальные фильтры,
4 - блок доплеровского накопления,
5 - формирователь эталонного сигнала,
6 - блоки весовой обработки,
71 - устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов,
72 и 73 - дополнительные два устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов,
8 - устройство сравнения амплитуд,
9 - антенна РЛС,
10 - приемный тракт ВЧ, ПЧ (высокой и промежуточной частоты),
11 - приемный канал 1 (на нулевой частоте),
12 - приемный канал 2 (на нулевой частоте),
13 - приемный канал 3 (на нулевой частоте),
14 - многоканальное устройство обработки фазоманипулированных сигналов.
Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (71) содержит схему стробирования (1), запоминающее устройство (2), подоптимальные фильтры (30÷3N-1), где - количество доплеровских каналов, блок доплеровского накопления (4), формирователь эталонного сигнала (5) и блоки весовой обработки (6), два устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (72 и 73) и устройство сравнения амплитуд (8). При этом выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (71) соединены со входами 10÷1N-1 устройства сравнения амплитуд (8), выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (72) соединены со входами 20÷2N-1 устройства сравнения амплитуд (8), выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (73) соединены со входами 30÷3N-1 устройства сравнения амплитуд (8).
Как следует из фиг. 4, приемный канал 1 служит для приема эхо-сигнала с выхода приемного тракта на несущей частоте . Приемные каналы 2 и 3 служат для приема помех на частотах, отстоящих от несущей частоты эхо-сигнала соответственно на  и
и  . В приемных каналах 1 - 3 на нулевой частоте выполняется низкочастотная фильтрация (фиг. 2) для обеспечения частотной избирательности приемного тракта.
. В приемных каналах 1 - 3 на нулевой частоте выполняется низкочастотная фильтрация (фиг. 2) для обеспечения частотной избирательности приемного тракта.
В устройстве сравнения амплитуд (8) (фиг. 3) для каждого i-го доплеровского канала (i = 0÷N-1) выполняется сравнение амплитуд сигналов после сжатия 1 - 3. Если сигнал после сжатия 1, поступивший на вход 1i устройства сравнения амплитуд (8) превышает по амплитуде сигналы после сжатия 2 и 3, поступившие соответственно на входы 2i и 3i, то с выхода 4i поступает сигнал после сжатия со входа 1i, в противном случае с выхода 4i сигнал не поступает (его амплитуда равна нулю).
При поступлении с выхода приемного тракта эхо-сигнала на несущей частоте амплитуда входного сигнала 1 превысит амплитуду входных сигналов 2 и 3, и эхо-сигнал поступит с соответствующего выхода 4i многоканального устройства обработки фазоманипулированных радиолокационных сигналов (число i зависит от величины доплеровского сдвига частоты эхо-сигнала). При поступлении с выхода приемного тракта помех на несущих частотах, близких к частотам или амплитуда входного сигнала 2 или 3 превысит амплитуду входного сигнала 1, и помехи не поступят с выхода многоканального устройства обработки фазоманипулированных радиолокационных сигналов.
Эффективность многоканального устройства обработки сложных радиолокационных сигналов подтверждена при его использовании в аппаратуре первичной обработки информации первичного канала (ПК) аэродромного радиолокационного комплекса (АРЛК) «Миасс», разработанного в АО «ЧРЗ «Полет».
Использование многоканального устройства обработки сложных радиолокационных сигналов в аппаратуре первичной обработки информации ПК АРЛК «Миасс» позволило повысить устойчивость к воздействию пассивных и активных помех на частотах, близких к несущей частоте эхо-сигналов целей ПК АРЛК «Миасс».
ЛИТЕРАТУРА
1. Теоретические основы радиолокации. М.: Советское радио, 1970 / Под ред. Ширмана Я. Д. - с. 137 - 139.
2. Ершов Г.А., Синицын Е.А., Фридман Л.Б., Ву Хан Я.Л., Недобежкин М.И. Патент 2713501 (РФ). Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов. Опубл. в бюллетене, 2020. № 4.
3. Kaiser, J.F., "Nonrecursive Digital Filter Design Using the I0- sinh Window Function," Proc. 1974 IEEE Symp. Circuits and Systems, (April 1974), pp. 20-23.


Изобретение относится к радиолокации и может быть использовано для разработки и модернизации устройств обработки фазоманипулированных радиолокационных сигналов. Техническим результатом является повышение устойчивости к воздействию помех на частотах, близких к несущей частоте эхо-сигнала. Такой результат достигается тем, что устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (71) содержит схему стробирования (1), запоминающее устройство (2), подоптимальные фильтры (30÷3N-1), где  - количество доплеровских каналов, блок доплеровского накопления (4), формирователь эталонного сигнала (5) и блоки весовой обработки (6), а также тем, что в устройство дополнительно введены два устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (72 и 73) и устройство сравнения амплитуд (8). 4 ил.
- количество доплеровских каналов, блок доплеровского накопления (4), формирователь эталонного сигнала (5) и блоки весовой обработки (6), а также тем, что в устройство дополнительно введены два устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов (72 и 73) и устройство сравнения амплитуд (8). 4 ил.
Многоканальное устройство обработки фазоманипулированных радиолокационных сигналов, содержащее схему стробирования 1, запоминающее устройство 2,  подоптимальных фильтров 30÷3N-1, где
подоптимальных фильтров 30÷3N-1, где  - количество доплеровских каналов, блок доплеровского накопления 4, формирователь эталонного сигнала 5, 2 блока весовой обработки 6, принимающее входной сигнал 1 на несущей частоте
- количество доплеровских каналов, блок доплеровского накопления 4, формирователь эталонного сигнала 5, 2 блока весовой обработки 6, принимающее входной сигнал 1 на несущей частоте  , отличающееся тем, что в него дополнительно введены устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72, принимающее входной сигнал 2 на частоте
, отличающееся тем, что в него дополнительно введены устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72, принимающее входной сигнал 2 на частоте  , устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73, принимающее входной сигнал 3 на частоте
, устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73, принимающее входной сигнал 3 на частоте  , где
, где  ,
,  - частота пропускания фильтра нижних частот,
- частота пропускания фильтра нижних частот,  - частота подавления фильтра нижних частот, и устройство сравнения амплитуд 8, причем выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 71 соединены со входами 10÷1N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72 соединены со входами 20÷2N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73 соединены со входами 30÷3N-1 устройства сравнения амплитуд 8.
- частота подавления фильтра нижних частот, и устройство сравнения амплитуд 8, причем выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 71 соединены со входами 10÷1N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 72 соединены со входами 20÷2N-1 устройства сравнения амплитуд 8, выходы подоптимальных фильтров 30÷3N-1 устройства доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов 73 соединены со входами 30÷3N-1 устройства сравнения амплитуд 8.
| Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов | 2018 |
|
RU2713501C1 |
| US 4240079 A, 16.12.1980 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОПЛЕРОВСКОГО СДВИГА ЧАСТОТЫ ПО ИНФОРМАЦИОННОМУ ФАЗОМАНИПУЛИРОВАННОМУ СИГНАЛУ НА ОСНОВЕ АНАЛИЗА ОТКЛОНЕНИЯ РАЗНОСТИ ФАЗ 2 ПОРЯДКА | 2018 |
|
RU2687884C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ФАЗЫ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2019 |
|
RU2751097C2 |
| СПОСОБ ФОРМИРОВАНИЯ И ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ МОДИФИЦИРОВАННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2015 |
|
RU2635875C2 |

