Изобретение относится к радиолокации и может быть использовано для разработки и совершенствования устройств обработки фазоманипулированных радиолокационных сигналов, что обеспечивает повышение тактико-технических характеристик и эффективности использования первичных радиолокационных станций (РЛС).
В настоящее время в первичных РЛС, работающих в импульсном режиме, широко используют длинные (до десятков микросекунд) зондирующие радиоимпульсы с фазовой манипуляцией и последующей обработкой (сжатием по времени) отраженных радиолокационных сигналов. Большая длительность радиоимпульсов обеспечивает энергию сигнала, необходимую для обнаружения летательных аппаратов (ЛА), а внутриимпульсная фазовая манипуляция и сжатие - заданное разрешение по дальности.
Широкое распространение получило использование в РЛС сигналов с фазовой манипуляцией 0-π между временными элементами длинного радиоимпульса, выполненной в соответствии с кодами Баркера. Последующая оптимальная или подоптимальная обработка таких сигналов обеспечивает их сжатие по времени до величины, соответствующей длительности одного элемента [1, 2].
Устройство обработки фазоманипулированных радиолокационных сигналов является составной частью приемо-передающего тракта РЛС и обеспечивает сжатие фазоманипулированного (ФМ) сигнала с пониженным уровнем боковых лепестков, появляющихся вблизи основного импульса сжатого сигнала.
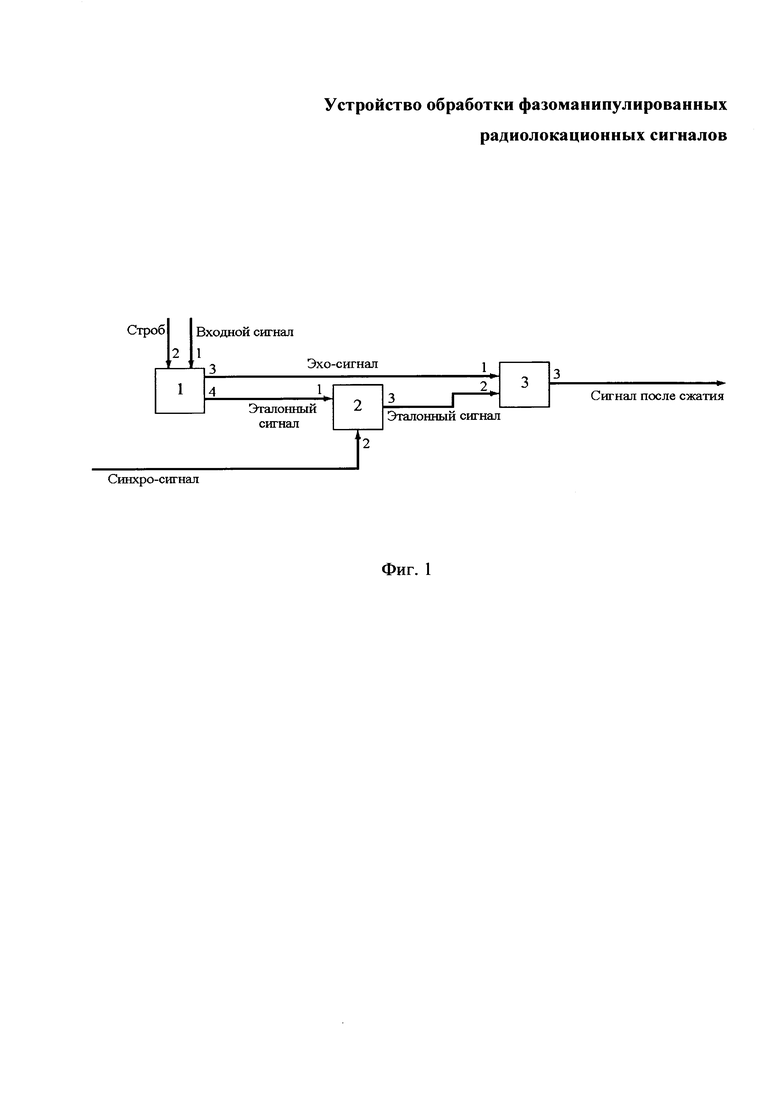
Наиболее близким по технической сущности к предлагаемому устройству является устройство обработки фазоманипулированных радиолокационных сигналов, выбранное в качестве прототипа [3] (см. фиг. 1), содержащее схему стробирования (1), запоминающее устройство (2) и подоптимальный фильтр (3) с соответствующими связями.
При сжатии ФМ сигнала подавление боковых лепестков обеспечивается при соответствии спектра обрабатываемого сигнала коэффициенту передачи подоптимального фильтра устройства обработки фазоманипулированных радиолокационных сигналов в спектральной области. Однако в реальной аппаратуре коэффициент передачи приемо-передающего тракта РЛС вносит искажения в спектр сигнала, что может привести к ухудшению характеристик его сжатия.
С целью компенсации искажений ФМ сигнала импульсная характеристика (ИХ) подоптимального фильтра устройства обработки фазоманипулированных радиолокационных сигналов формируется с использованием оценки параметров зондирующего сигнала, прошедшего через приемо-передающий тракт РЛС (эталонного сигнала), что позволяет автоматически подстраивать подоптимальный фильтр под искажения эхо-сигнала. При этом коэффициент передачи подоптимального фильтра в спектральной области будет соответствовать спектру эхо-сигнала, т.к. эталонный и эхо-сигналы проходят через один и тот же приемо-передающий тракт.
На вход 1 схемы стробирования (1) с цифрового фазового детектора приемного тракта РЛС подается входной сигнал: в моменты времени, соответствующие излучению зондирующих импульсов, поступают отсчеты эталонного сигнала, в остальные моменты времени - отсчеты эхо-сигнала (см. фиг. 1). На вход 2 схемы стробирования (1) с синхронизатора в моменты времени, соответствующие излучению зондирующих импульсов, поступает сигнал Строб, обеспечивающий формирование эхо-сигнала на выходе 3 и эталонного сигнала на выходе 4.
С выхода 4 схемы стробирования (1) эталонный сигнал поступает на вход 1 запоминающего устройства (2) и записывается в запоминающее устройство (2) по синхросигналу, поступающему на вход 2 запоминающего устройства (2). В остальные моменты времени с выхода 3 схемы стробирования (1) эхо-сигнал поступает на вход 1 подоптимального фильтра (3). Эталонный сигнал, записанный в запоминающее устройство (2), поступает в виде запомненного эталонного сигнала на выход 3 запоминающего устройства (2).
С выхода 3 запоминающего устройства (2) запомненный эталонный сигнал поступает на вход 2 подоптимального фильтра (3). На выходе 3 подоптимального фильтра (3) формируется сжатый сигнал. Выход 3 подоптимального фильтра (3) является выходом устройства обработки фазоманипулированных радиолокационных сигналов.
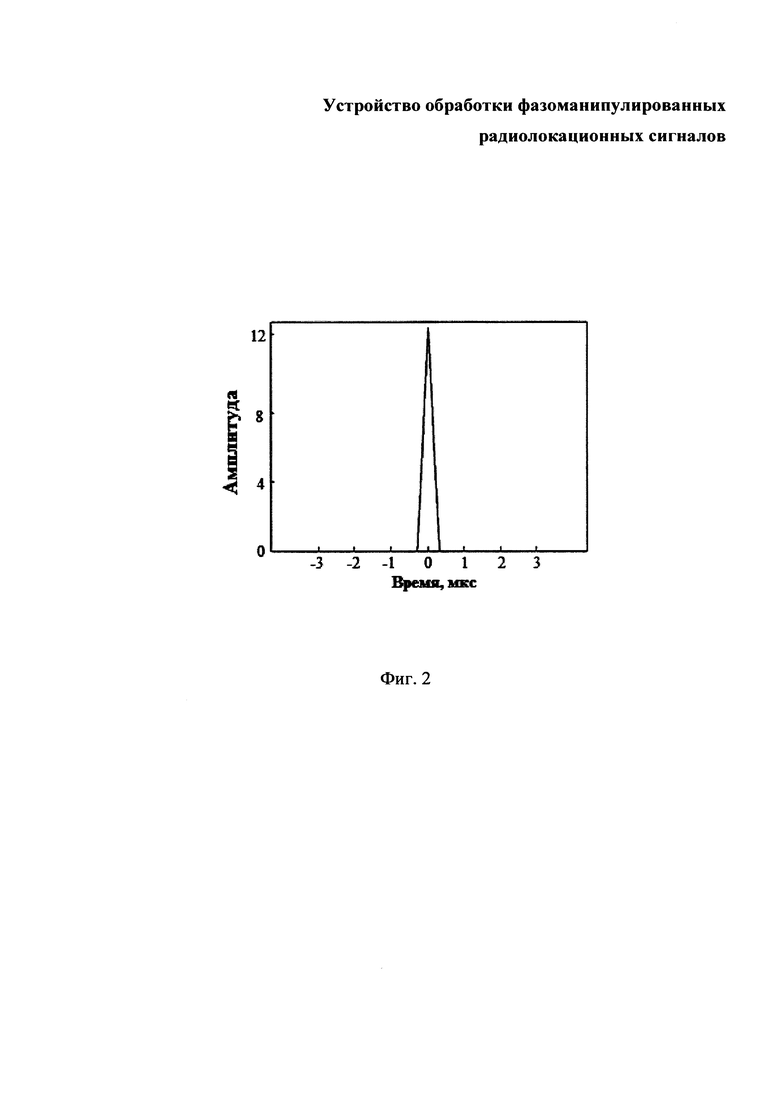
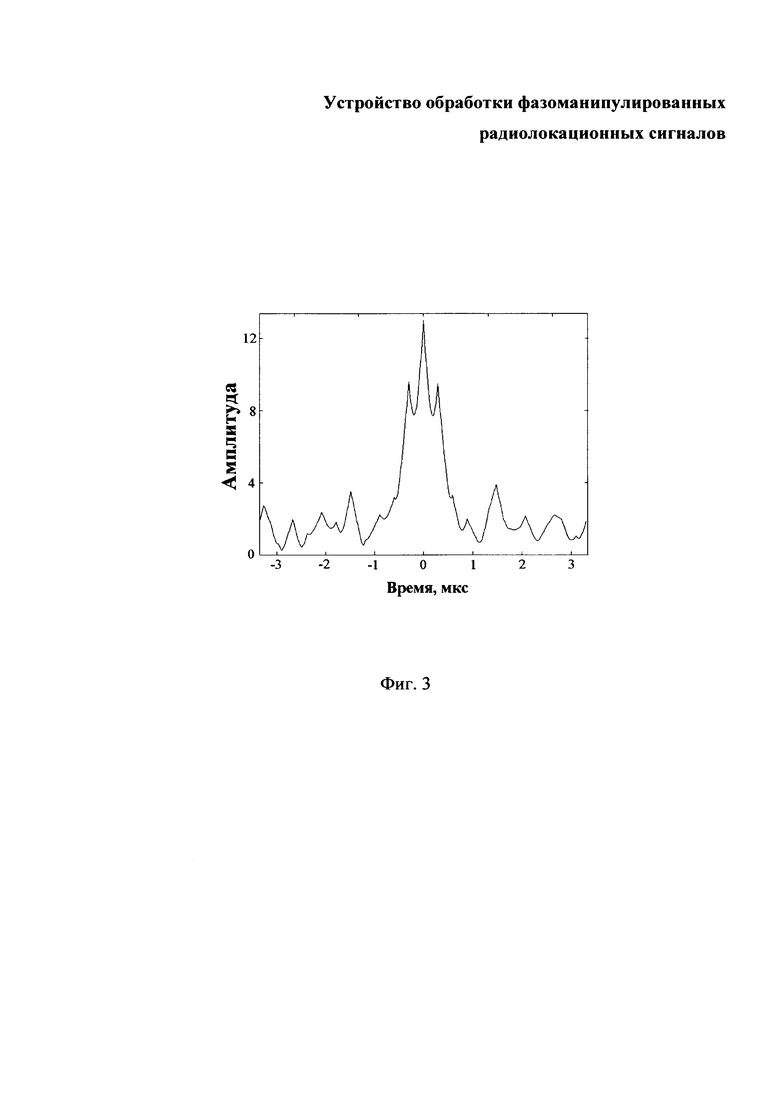
На фиг. 2 показан выходной сигнал устройства обработки фазоманипулированных радиолокационных сигналов при отсутствии доплеровского сдвига частоты отраженного радиолокационного сигнала. На фиг. 3 показан выходной сигнал устройства обработки фазоманипулированных радиолокационных сигналов при наличии доплеровского сдвига частоты (при доплеровском набеге фазы за один временной элемент ФМ сигнала, равном 14,4°). Из сравнения фиг. 2 и фиг. 3 следует, что наличие доплеровского сдвига частоты привело к расширению основного пика выходного сигнала и к образованию боковых лепестков на уровне не менее -20 дБ (относительно основного пика). Следовательно, данное устройство обработки фазоманипулированных радиолокационных сигналов не обеспечивает сохранение характеристик эффективности сжатия при наличии доплеровского сдвига частоты сигнала, отраженного от движущегося ЛА.
Задачей создания изобретения является сохранение характеристик эффективности сжатия ФМ сигнала при наличии доплеровского сдвига частоты сигнала, отраженного от движущегося ЛА.
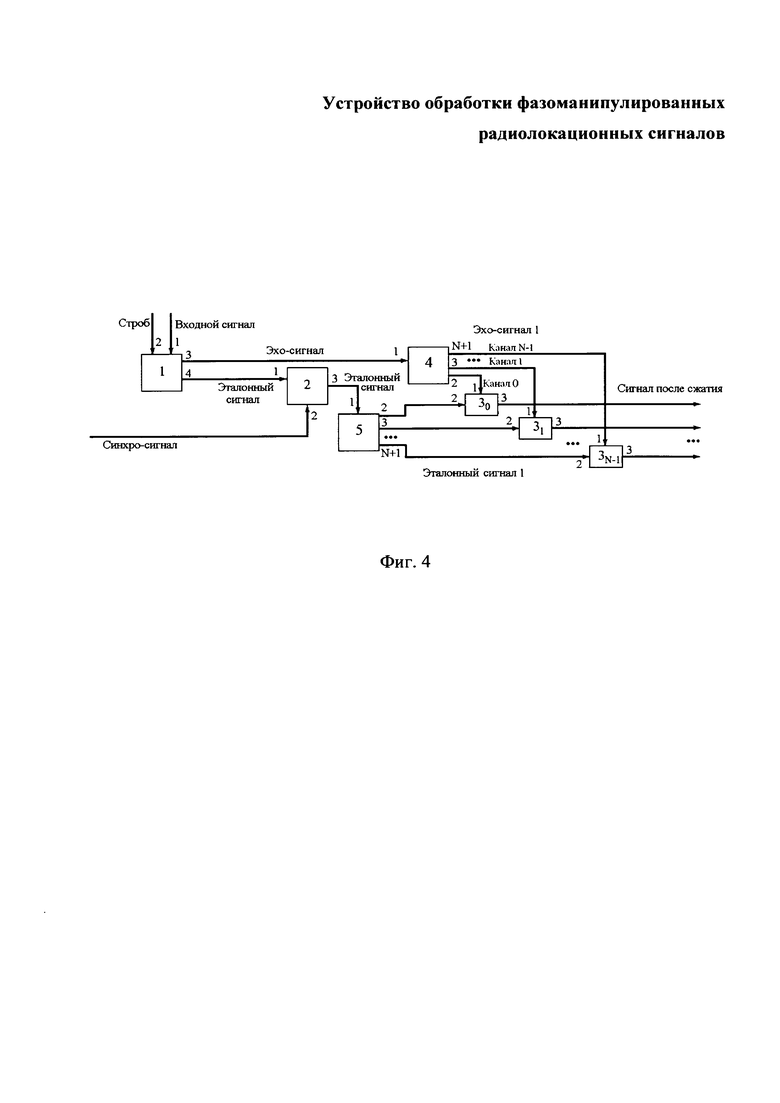
Указанная задача достигается тем, что в устройство обработки фазоманипулированных радиолокационных сигналов, содержащее схему стробирования (1), запоминающее устройство (2) и подоптимальный фильтр (30), дополнительно введены блок доплеровского накопления (4), формирователь эталонного сигнала (5) и (N-1) подоптимальных фильтров (31÷3N-1), где N - количество доплеровских каналов, причем третий выход схемы стробирования (1) соединен с блоком доплеровского накопления (4), выходы блока доплеровского накопления (4) соединены с первыми входами подоптимальных фильтров 30÷3N-1, выход запоминающего устройства (2) соединен с формирователем эталонного сигнала (5), выходы формирователя эталонного сигнала (5) соединены со вторыми входами подоптимальных фильтров 30÷3N-1.
На фиг. 4 приведена функциональная схема предлагаемого устройства обработки фазоманипулированных радиолокационных сигналов.
Принцип работы устройства обработки фазоманипулированных радиолокационных сигналов заключается в реализации следующих теоретических положений.
Импульсная характеристика подоптимального фильтра при отсутствии доплеровского сдвига частоты имеет вид
 ,
,
где λ(n) - ИХ подоптимального фильтра при отсутствии доплеровского сдвига частоты;  - элементарный (смодулированный) импульс; n - номер дискреты (отсчета); ns - количество дискрет в одном элементе ФМ сигнала; δ(n) - дельта-функция; F и F-1 - операторы соответственно прямого и обратного дискретных преобразований Фурье;
- элементарный (смодулированный) импульс; n - номер дискреты (отсчета); ns - количество дискрет в одном элементе ФМ сигнала; δ(n) - дельта-функция; F и F-1 - операторы соответственно прямого и обратного дискретных преобразований Фурье;  - ИХ кодирующего фильтра; а1=±1; nв - количество элементов ФМ сигнала.
- ИХ кодирующего фильтра; а1=±1; nв - количество элементов ФМ сигнала.
Доплеровский набег фазы принятого сигнала за время Тр, равное длительности одного элемента ФМ сигнала, определяется выражением
 ,
,
где ΔϕD - доплеровский набег фазы принятого сигнала; Тр - длительность одного элемента ФМ сигнала; ƒD - доплеровский сдвиг частоты; λC - длина волны излучаемого сигнала; vR - радиальная скорость движения цели.
Импульсная характеристика подоптимального фильтра с учетом доплеровского сдвига частоты имеет вид

где λD(n) - ИХ подоптимального фильтра с учетом доплеровского сдвига частоты; Т - период дискретизации сигнала; j - мнимая единица; * - символ свертки.
Устройство обработки фазоманипулированных радиолокационных сигналов работает следующим образом.
На вход 1 схемы стробирования (1) с цифрового фазового детектора приемного тракта РЛС подается входной сигнал: в моменты времени, соответствующие излучению зондирующих импульсов, поступают отсчеты эталонного сигнала, в остальные моменты времени - отсчеты эхо-сигнала. На вход 2 схемы стробирования (1) с синхронизатора в моменты времени, соответствующие излучению зондирующих импульсов, поступает сигнал Строб. При этом с выхода 4 схемы стробирования (1) эталонный сигнал поступает на вход 1 запоминающего устройства (2) и записывается в запоминающее устройство (2) по синхросигналу, поступающему на вход 2 запоминающего устройства (2).
В остальные моменты времени с выхода 3 схемы стробирования (1) эхо-сигнал поступает на блок доплеровского накопления (4). С выходов 2÷(N+1) блока доплеровского накопления (4) на входы 1 подоптимальных фильтров 30÷3N-1, образующих N доплеровских каналов, поступает эхо-сигнал 1.
Каждый доплеровский канал настроен на эхо-сигналы с доплеровским сдвигом частоты, равным  , где ƒDi - доплеровский сдвиг частоты, соответствующий i-му доплеровскому каналу; ƒDmax - доплеровский сдвиг частоты, соответствующий (N-1)-му доплеровскому каналу; i=0÷(N-1) - номер доплеровского канала.
, где ƒDi - доплеровский сдвиг частоты, соответствующий i-му доплеровскому каналу; ƒDmax - доплеровский сдвиг частоты, соответствующий (N-1)-му доплеровскому каналу; i=0÷(N-1) - номер доплеровского канала.
Эталонный сигнал, записанный в запоминающее устройство (2), поступает в виде запомненного эталонного сигнала на выход 3 запоминающего устройства (2). Запомненный эталонный сигнал без доплеровского сдвига частоты κ(n) поступает с выхода 3 запоминающего устройства (2) на вход 1 формирователя эталонного сигнала (5).
С выходов 2÷(N+1) формирователя эталонного сигнала (5) на входы 2 подоптимальных фильтров 30÷3N-1, образующих N доплеровских каналов, поступает эталонный сигнал 1
 ,
,
где i=0÷(N-1),  - эталонный сигнал 1 в i-м доплеровском канале;
- эталонный сигнал 1 в i-м доплеровском канале;
κ(n) - эталонный сигнал без доплеровского сдвига частоты.
В каждом подоптимальном фильтре 30, 31, …, 3N-1 выполняется сжатие эхо-сигнала 1 из i-го доплеровского канала с эталонным сигналом 1, соответствующим доплеровскому сдвигу частоты ƒDi.
Использование N подоптимальных фильтров позволяет выполнять сжатие ФМ сигнала с учетом доплеровского сдвига частоты, что обеспечивает сохранение характеристик эффективности сжатия сигналов, отраженных от движущихся ЛА.
Импульсная характеристика подоптимальных фильтров 30, 31, …, 3N-1 с учетом доплеровского сдвига частоты имеет вид
 ,
,
где i=0÷(N-1), λDi(n) - ИХ подоптимальных фильтров 30, 31, …, 3N-1.
Выходы подоптимальных фильтров 30÷3N-1 являются выходами устройства обработки фазоманипулированных радиолокационных сигналов.
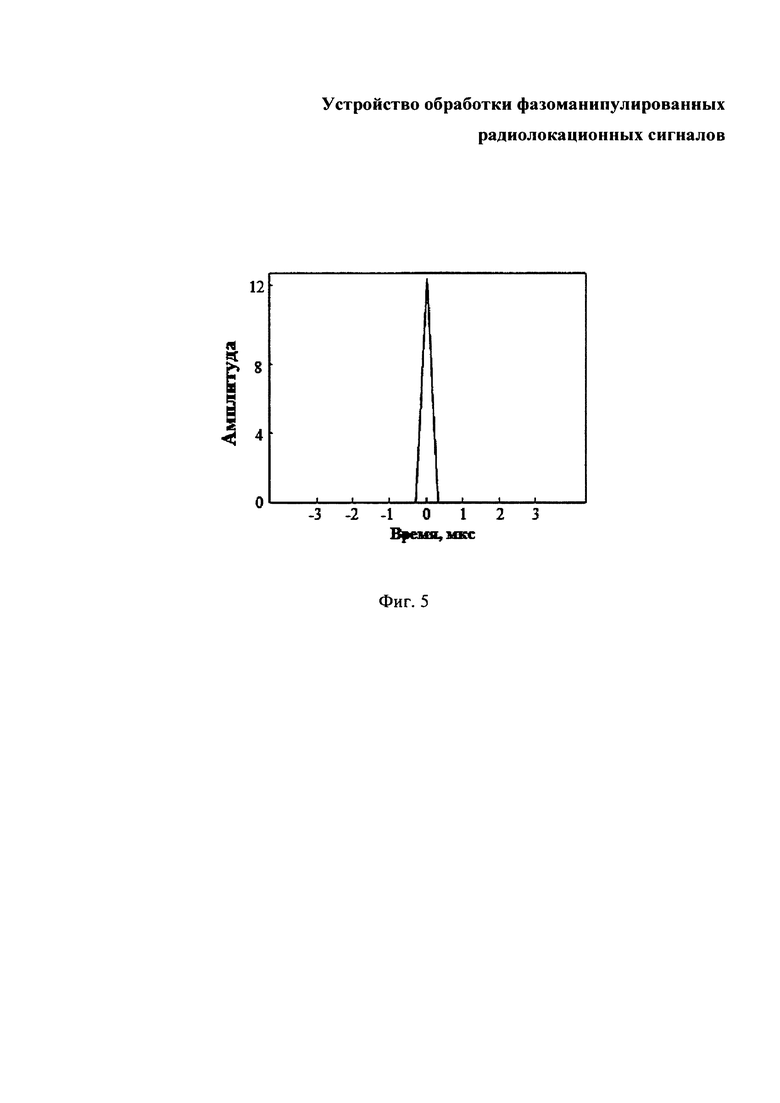
На фиг. 5 показан выходной сигнал устройства обработки фазоманипулированных радиолокационных сигналов при наличии доплеровского сдвига частоты (при доплеровском набеге фазы за один временной элемент ФМ сигнала, равном 14,4°). Из сравнения фиг. 2 и фиг. 5 следует, что наличие доплеровского сдвига частоты не привело к ухудшению характеристик эффективности сжатия ФМ сигналов (расширению основного пика выходного сигнала или образованию боковых лепестков). Следовательно, предлагаемое устройство обработки фазоманипулированных радиолокационных сигналов обеспечивает сохранение характеристик эффективности сжатия ФМ сигнала, отраженного от движущегося летательного аппарата.
Эффективность устройства обработки фазоманипулированных радиолокационных сигналов подтверждена при его использовании в аппаратуре первичной обработки информации, разработанной на предприятии.
Использование устройства обработки фазоманипулированных радиолокационных сигналов в аппаратуре первичной обработки информации позволило значительно снизить уровень боковых лепестков (до минус 50 дБ).
ЛИТЕРАТУРА
1. Теоретические основы радиолокации. М.: Советское радио, 1970 / Под ред. Ширмана Я.Д. - с. 137-139.
2. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981, - с. 135-138.
3. Коршунов А.Ю., Мазаян Н.Р., Николаев С.Ф., Синицын Е.А., Фридман Л.Б., Шильдкрет А.Б. Улучшение характеристик эффективности сжатия фазоманипулированного сигнала путем компенсации искажений, возникающих в приемо-передающем тракте радиолокатора // Сборник докладов 22-й международной конференции «СВЧ-техника и телекоммуникационные технологии», том 2. - Севастополь, 2012. - Стр. 1088-1089.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство обработки фазоманипулированных радиолокационных сигналов | 2022 |
|
RU2792418C1 |
| Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов | 2018 |
|
RU2713501C1 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ | 2017 |
|
RU2673679C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
Изобретение относится к радиолокации и может быть использовано для разработки и совершенствования устройств обработки фазоманипулированных радиолокационных сигналов. Достигаемый технический результат - сохранение характеристик эффективности сжатия фазоманипулированных радиолокационных сигналов при наличии доплеровского сдвига частоты сигнала, отраженных от движущихся летательных аппаратов. Указанный результат достигается введением блока доплеровского накопления, формирователя эталонного сигнала и (N-1) подоптимальных фильтров (где N - количество доплеровских каналов), а также выполнением сжатия фазо-манипулированного сигнала с учетом доплеровского сдвига частоты. 5 ил.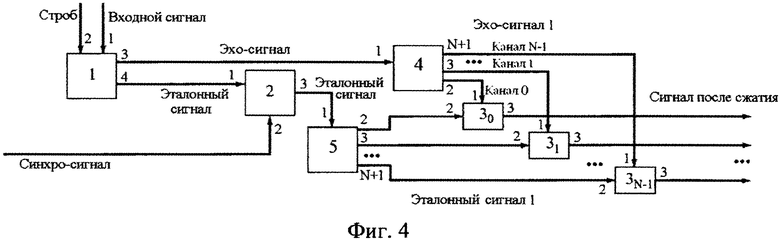
Устройство обработки фазоманипулированных радиолокационных сигналов, содержащее схему стробирования, запоминающее устройство и подоптимальный фильтр, причем на первый вход схемы стробирования с цифрового фазового детектора поступает входной сигнал, на второй вход схемы стробирования с синхронизатора поступает сигнал Строб, четвертый выход схемы стробирования соединен с первым входом запоминающего устройства, синхросигнал поступает на второй вход запоминающего устройства, отличающееся тем, что в него дополнительно введены блок доплеровского накопления, формирователь эталонного сигнала и (N-1) подоптимальных фильтров (где N - количество доплеровских каналов), причем третий выход схемы стробирования соединен с блоком доплеровского накопления, выходы 2÷(N+1) блока доплеровского накопления соединены с первыми входами подоптимальных фильтров, выход запоминающего устройства соединен с формирователем эталонного сигнала, выходы формирователя эталонного сигнала 2÷(N+1) соединены со вторыми входами N подоптимальных фильтров, причем выходы подоптимальных фильтров являются выходами предлагаемого устройства.
| КОРШУНОВ А.Ю | |||
| и др | |||
| Улучшение характеристик эффективности сжатия фазоманипулированного сигнала путем компенсации искажений, возникающих в приемо-передающем тракте радиолокатора | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| RU 94021182 A1, 20.03.1996 | |||
| Адаптивное устройство для пространственно-временной обработки фазоманипулированных сигналов | 1984 |
|
SU1234981A1 |
| WO 2002014903 A1, 21.02.2002 | |||
| JP 2013046373 A, 04.03.2013 | |||
| US 20160047892 A1, 18.02.2016 | |||
| 1969 |
|
SU410563A1 | |

