Область техники, к которой относится изобретение
Настоящее изобретение относится к системе комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления и к способу, использующему эту систему.
В настоящем изобретении термин «отходы» понимается в широком смысле, преимущественно как твердые коммунальные, промышленные и строительные отходы, в том числе крупногабаритные.
Уровень техники
В настоящее время известны различные системы для вывоза отходов.
Например, из патента на полезную модель Китая №201548995 (опубл. 11.08.2010) известна система управления вывозом строительных отходов, содержащая центральное устройство отслеживания и обработки информации, с которым имеют беспроводную связь видеокамеры, установленные на строительных площадках для получения информации о транспортных средствах и передающие информацию в базу данных центрального устройства. Эта система имеет ограниченные возможности, т.к. не позволяет проверять реальную загрузку контейнерных мусоровозов и выявлять факты их ручной загрузки.
В качестве ближайшего аналога принята система для управления и мониторинга процессами оплаты и вывоза отходов мусоровозами (заявка Китая №102521665, опубл. 27.06.2012), которая содержит систему обработки данных и бортовые системы, размещенные непосредственно на мусоровозах. Каждая бортовая система содержит бортовой терминал управления, устройство взвешивания, считыватель карт на интегральных схемах и считыватель банковских карт, причем устройство взвешивания, считыватель карт на интегральных схемах и считыватель банковских карт подключены к бортовому терминалу управления, оснащенному электронной навигационной системой с дисплеем. Система обработки данных включает модуль хранения данных, терминал оператора и клиент геоинформационной системы. Каждый бортовой терминал управления дополнительно оснащен GPRS /CDMA /3G модулем передачи данных. Система для управления и мониторинга процессами оплаты и вывоза отходов мусоровозами обеспечивает измерение массы собранных отходов, расчет стоимости для оплаты, мониторинг процесса транспортировки в реальном масштабе времени. Недостатками данного технического решения являются:
- необходимость значительных изменений в конструкции мусоровозов для установки устройств взвешивания, что не всегда возможно;
- недостаточная точность тарификации клиентов в силу отсутствия возможности непосредственного измерения объема отходов (только через учет массы отходов с использованием некоторого усредненного значения их плотности);
- отсутствие видеозаписей выгрузки контейнеров и, как следствие, сложность в разрешении спорных ситуаций с клиентами.
Раскрытие изобретения
Технической задачей изобретения является преодоление недостатков ближайшего аналога. При этом достигается технический результат в виде:
- повышения точности учета объема вывозимых отходов, упрощения процесса установки бортовой системы мониторинга мусоровозов,
- расширения модельного ряда интегрируемых в систему мусоровозов,
- повышения точности тарификации клиентов - владельцев контейнеров и повышения степени их информированности о процессе и объеме вывозимых отходов.
Для решения этой задачи и достижения упомянутого технического результата в первом объекте настоящего изобретения предложена система комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления, содержащая:
- модуль загрузки видеоданных, вход которого предназначен для приема по беспроводным каналам связи видеозаписей с видеорегистраторов мусоровозов;
- модуль обработки видеоданных, вход которого подключен к первому выходу модуля загрузки видеоданных;
- модуль хранения данных, вход которого предназначен для приема по беспроводным каналам связи текущих геодезических координат мусоровозов от их бортовых приемников сигнала систем глобального позиционирования, а первый вход-выход подключен к первому входу выходу модуля обработки видеоданных;
- терминал администратора, первый вход-выход которого подключен ко второму входу выходу модуля хранения данных, второй вход-выход подключен ко второму входу-выходу модуля обработки видеоданных, а третий вход-выход соединен со входом-выходом модуля загрузки видеоданных;
- терминал оператора, первый вход-выход которого подключен к третьему входу-выходу модуля хранения данных;
- модуль создания отчетов, вход которого соединен с выходом модуля хранения данных, а вход-выход подключен ко второму входу-выходу терминала оператора;
- модуль внешнего доступа, первый вход-выход которого соединен с четвертым входом-выходом модуля хранения данных, второй вход-выход подключен к третьему входу-выходу терминала оператора, а третий и четвертый входы-выходы предназначены для обмена данными, соответственно, с терминалами водителей мусоровозов и с терминалами клиентов;
- модуль подготовки обучающих данных, вход которого подключен ко второму выходу модуля загрузки видеоданных;
- модуль обучения, вход которого соединен с выходом модуля подготовки обучающих данных, а первый вход-выход подключен к третьему входу-выходу модуля обработки видеоданных;
- терминал обучения, первый и второй входы-выходы которого соединены, соответственно, со вторым входами-выходами модуля обучения и входом-выходом модуля подготовки обучающих данных.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложен способ комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления с использованием системы по п. 1, заключающийся в том, что:
- оснащают каждый мусоровоз видеорегистратором, сопряженным с приемником сигнала систем глобального позиционирования;
- размещают видеорегистратор каждого мусоровоза таким образом, чтобы поле зрения камеры видеорегистратора покрывало все пространство выгрузки контейнеров отходов;
- производят видеосъемку видеорегистратором непрерывно, начиная от момента выезда мусоровоза на маршрут и до момента его возвращения;
- дополняют каждый кадр видеозаписи, полученной в процессе видеосъемки, числовыми подписями геодезических координат мусоровоза, даты и времени видеосъемки;
- формируют в начале рабочего дня для каждого мусоровоза маршрутные задания, каждое из которых содержит до двух десятков площадок первичного накопления отходов;
- отправляют сформированные маршрутные задания водителям для выполнения;
- в процессе выполнения каждого маршрутного задания осуществляют передачу видеоданных с видеорегистратора конкретного мусоровоза по беспроводным каналам связи в систему обработки данных;
- анализируют видеоданные с видеорегистратора каждого мусоровоза для поиска и отслеживания отдельных контейнеров, определения их типов и степеней заполнения до и после выгрузки с последующим вычислением объема выгруженных отходов;
- распознают числовые подписи даты, времени и геодезических координат на видеоданных для определения неподвижности мусоровоза, ближайшей площадки первичного накопления и клиента, которому она принадлежит;
- осуществляют на основании полученной информации тарификацию клиентов;
- обеспечивают доступ клиентов через личные кабинеты к выставленным счетам и роликам выгрузки контейнеров.
Следует отметить, что настоящее изобретение преимущественно предназначено для работы с твердыми коммунальными, промышленными и строительными отходами, в том числе и с крупногабаритными, но не ограничено ими, и может быть применено в случае любых иных отходов.
Краткое описание чертежей
Настоящее изобретение иллюстрируется приложенными чертежами.
На Фиг. 1 приведена структурная схема системы по первому объекту настоящего изобретения.
На Фиг. 2 представлен кадр видеозаписи с видеорегистратора мусоровоза с числовой подписью геодезических координат мусоровоза и даты и времени съемки.
На Фиг. 3 показана блок-схема алгоритма функционирования модуля обработки видеоданных.
Подробное описание осуществления
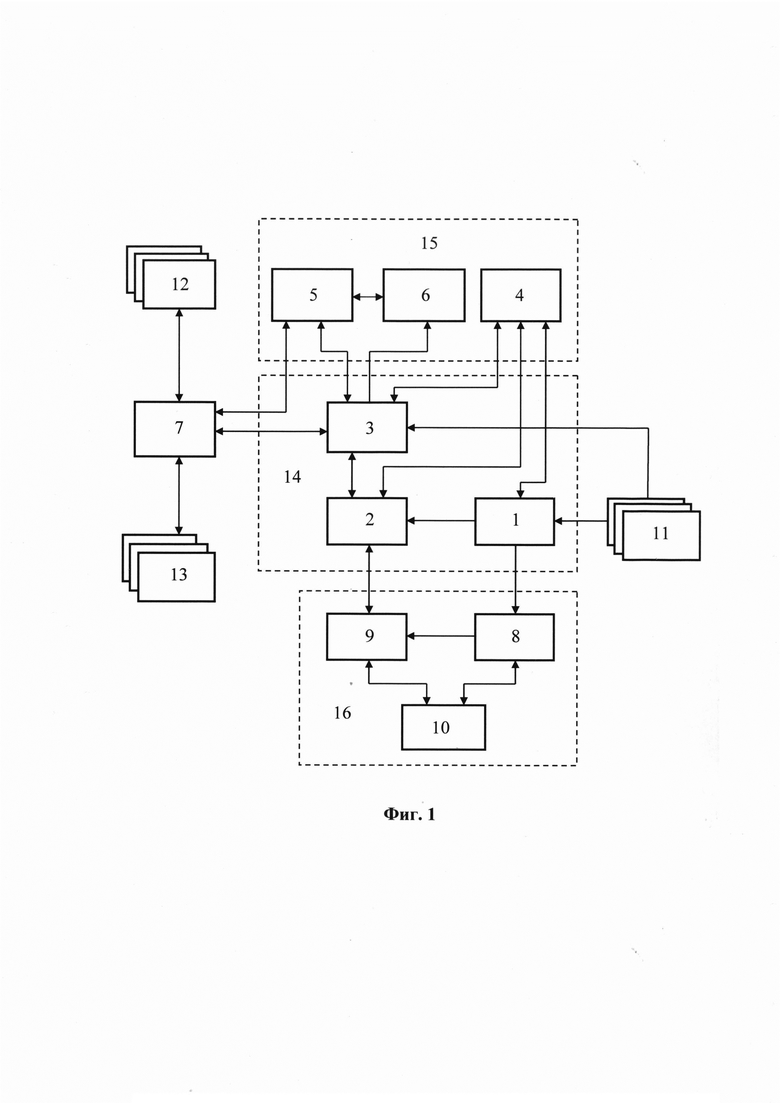
Как показано на Фиг. 1, система по первому объекту настоящего изобретения содержит в своем составе:
- модуль 1 загрузки видеоданных,
- модуль 2 обработки видеоданных,
- модуль 3 хранения данных,
- терминал 4 администратора,
- терминал 5 оператора,
- модуль 6 создания отчетов,
- модуль 7 внешнего доступа,
- модуль 8 подготовки обучающих данных,
- модуль 9 обучения,
- терминал 10 обучения,
- видеорегистраторы 11 мусоровозов, -терминалы 12 водителей, -терминалы 13 клиентов.
Вход модуля 1 загрузки видеоданных предназначен для приема по беспроводным каналам связи видеозаписей с видеорегистраторов 11 мусоровозов. Первый и второй выходы модуля 1 загрузки видеоданных соединены со входами, соответственно, модуля 2 обработки видеоданных и модуля 8 подготовки обучающих данных. Выход модуля 8 подготовки обучающих данных подключен ко входу модуля 9 обучения, первый вход-выход которого соединен с третьим входом-выходом модуля 2 обработки видеоданных. Первый и второй входы-выходы терминала 10 обучения соединены, соответственно, со вторым входами-выходами модуля 9 обучения и входом-выходом модуля 8 подготовки обучающих данных.
Первый вход-выход модуля 2 обработки видеоданных соединен с одноименным входом-выходом модуля 3 хранения данных, второй вход-выход которого подключен к первому входу-выходу терминала 4 администратора. Вторые и третьи входы-выходы терминала 4 администратора подключены, соответственно, ко второму входу-выходу модуля 2 обработки видеоданных и ко входу-выходу модуля 1 загрузки видеоданных.
Третий и четвертый входы-выходы модуля 3 хранения данных соединены с первыми входами-выходами, соответственно, терминала 5 оператора и модуля 7 внешнего доступа. Выход модуля 3 хранения данных подключен ко входу модуля 6 создания отчетов, вход-выход которого соединен со вторым входом-выходом терминала 5 оператора, третий вход-выход которого подключен ко второму входу выходу модуля 7 внешнего доступа. Третий и четвертый входы-выходы модуля 7 внешнего доступа предназначены для обмена данными, соответственно, с терминалами 12 водителей мусоровозов и с терминалами 13 клиентов.
На Фиг. 1 модуль 1 загрузки видеоданных, модуль 2 обработки видеоданных и модуль 3 хранения данных объединены в контур 14 обработки, который предназначен для:
- загрузки видеоданных с видеорегистраторов 11 мусоровозов;
- поиска и отслеживания отдельных контейнеров в видеопотоке, определения их типов и степени заполнения до и после выгрузки;
- сохранения отдельных видеороликов процесса выгрузки контейнеров и расчета объема выгруженных отходов;
-распознавания подписей геодезических координат мусоровоза в момент выгрузки и привязки контейнера к ближайшей площадке для тарификации клиентов.
Терминал 4 администратора, терминал 5 оператора и модуль 6 создания отчетов объединены на Фиг. 1 в контур 15 управления, предназначенный для:
- назначения и оперативного изменения маршрутных заданий водителей мусоровозов;
- мониторинга выполнения маршрутных заданий;
- мониторинга процесса загрузки и обработки видеоданных с видеорегистраторов мусоровозов, фиксации ошибок и нештатных ситуаций;
- разрешения спорных ситуаций с ручной загрузкой / разгрузкой контейнеров;
- управления учетными записями клиентов и водителей;
- тарификации клиентов, выставления счетов;
-оценки различных количественных показателей процесса сбора и транспортировки отходов, создания отчетов.
Модуль 8 подготовки обучающих данных, модуль 9 обучения и терминал 10 обучения включены на Фиг. 1 в контур 16 обучения, который применяется для настройки параметров нейросетевых алгоритмов, используемых контуром 14 обработки для выделения, отслеживания, определения типов и степени заполнения контейнеров отходов.
Модуль 7 внешнего доступа применяется для аутентификации и организации безопасного доступа:
- каждому водителю к его маршрутному заданию с возможностью обратной связи для информирования о невозможности дальнейшего выполнения этого задания;
-каждому клиенту к своему личному кабинету, включающему текущий баланс, выставленные счета и отдельные видеоролики выгрузки контейнеров отходов, а также рассчитанные значения объема отходов с возможностью обратной связи.
Контур 14 обработки и контур 16 обучения могут быть реализованы на основе рабочей станции или сервера, оснащенного процессором Intel Core i7/i9 или AMD Ryzen / Threadripper, 32Гб ОЗУ, не менее 4Т6 ПЗУ на основе твердотельных накопителей (SSD) и не менее, чем одним графическим ускорителем NVIDIA GeForce 20xx/30xx/Quadro RTX (не менее 8Гб ОЗУ), который используется для ускорения работы нейросетевых алгоритмов модуля 2 обработки данных и их настройки модулем 9 обучения.
Контур 15 управления может быть реализован на основе двух рабочих станций, оснащенных процессором Intel Core i3 или AMD Ryzen, 8Гб ОЗУ.
Способ комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления по второму объекту настоящего изобретения с использованием системы по первому объекту настоящего изобретения реализуется следующим образом.
Каждый мусоровоз оснащают приемником сигнала систем глобального позиционирования, сопряженным с видеорегистратором 11, который размещают так, чтобы поле зрения камеры видеорегистратора покрывало все пространство выгрузки контейнеров отходов, перевозимых данным мусоровозом. Кроме того, в каждом мусоровозе имеется терминал 12 водителя, который представляет собой мобильное устройство для осуществления беспроводной связи с модулем 7 внешнего доступа.
В начале рабочего дня оператор системы, используя терминал 5 оператора, загружает из модуля 3 хранения данных шаблоны маршрутных заданий сбора отходов, создает на их основе маршрутные задания, при необходимости редактируя их согласно текущей обстановке. Каждое созданное маршрутное задание предполагает посещение нескольких (до двух десятков) контрольных точек, соответствующих площадкам первичного накопления отходов. Каждое задание оператор назначает определенному водителю (и мусоровозу), сохраняет маршрутные задания в модуле 3 хранения данных и передает команду модулю 7 внешнего доступа на отправку маршрутных заданий на терминалы 12 водителей. Водители получают маршрутные задания в виде набора контрольных точек и отправляют сообщение о подтверждении приема к исполнению маршрутного задания, или о невозможности его исполнения. Сообщения водителей принимаются модулем 7 внешнего доступа, сохраняются в модуле 3 хранения данных и отображаются на терминале 5 оператора. Оператор, в случае невозможности исполнения маршрутных заданий одним или несколькими водителями, перераспределяет их контрольные точки между другими водителями и мусоровозами, повторно сохраняет маршрутные задания в модуле 3 хранения данных и передает команду модулю 7 внешнего доступа на отправку маршрутных заданий на терминалы 12 водителей, чьи маршрутные задания изменились. Корректировка маршрутных заданий продолжается до тех пор, пока все они не будут приняты водителями к исполнению.
После приема маршрутных заданий к исполнению водители включают бортовые системы видеорегистрации (видеорегистраторы 11) мусоровозов и выезжают на маршрут. Каждый кадр видеозаписи, полученной в процессе видеосъемки (видеорегистрации), дополняют числовыми подписями геодезических координат мусоровоза, даты и времени видеосъемки. Оператор системы отслеживает перемещение мусоровозов и посещение ими контрольных точек маршрутного задания за счет передачи текущих геодезических координат от бортовых приемников сигнала систем глобального позиционирования в реальном масштабе времени в модуль 3 хранения данных и отображения на терминале 5 оператора. При этом факт посещения контрольной точки определяется как остановка в непосредственной близости от нее (50-100 м) на время не менее 1 мин. В случае невозможности забора отходов в некоторой контрольной точке (подъезд к ней заблокирован или закрыт) водитель с помощью своего терминала 12 передает соответствующее сообщение через модуль 7 внешнего доступа в модуль 3 хранения данных и на терминал 5 оператора.
При получении сообщения оператор предпринимает необходимые организационные действия для обеспечения доступа конкретного мусоровоза к требуемой контрольной точке и в случае невозможности организации доступа переносит посещение контрольной точки на следующий рабочий день, добавляя соответствующую запись с помощью терминала 5 оператора в модуль 3 хранения данных. Затем, путем передачи сообщения от терминала 5 оператора через модуль 7 внешнего доступа на терминал 12 водителя этого мусоровоза, оператор информирует его о дальнейших действиях - ожидании доступа к текущей контрольной точке либо переходу к следующей. Если дальнейшее исполнение маршрутного задания становится невозможным (в силу возможной неисправности мусоровоза, дорожно-транспортного происшествия, ухудшения самочувствия водителя и т.п.) водитель с помощью своего терминала 12 также отправляет соответствующее сообщение через модуль 7 внешнего доступа в модуль 3 хранения данных и на терминал 5 оператора. Оператор, исходя из текущей загрузки других мусоровозов, перераспределяет оставшиеся контрольные точки между ними или переносит их посещение на следующий рабочий день. Дополненные маршрутные задания оператор помощью терминала 5 оператора сохраняет в модуле 3 хранения данных и отправляет команду модулю 7 внешнего доступа на передачу дополнительных контрольных точек на терминалы 12 водителей.
Видеопоток с видеорегистратора 11 каждого мусоровоза в масштабе времени, близком к реальному, по беспроводным каналам связи поступает в систему обработки данных. На каждой видеозаписи система находит и отслеживает отдельные контейнеры, определяет их типы и степень заполнения каждого из них до и после выгрузки. Далее система для каждого контейнера создает отдельный видеоролик процесса выгрузки и рассчитывает объем выгруженных отходов как разность степени заполнения до и после выгрузки, умноженную на его емкость, определяемую исходя из типа этого контейнера. Привязка рассчитанного объема отходов к клиентам для последующей их тарификации выполняется на основе определения владельца ближайшей площадки к положению мусоровоза во время выгрузки каждого из контейнеров. На Фиг. 2 для примера представлен кадр видеозаписи с видеорегистратора 11 мусоровоза с числовой подписью геодезических координат мусоровоза и даты и времени съемки.
Принятые модулем 7 внешнего доступа видеоданные с видеорегистратора 12 каждого мусоровоза анализируют для поиска и отслеживания отдельных контейнеров, определения их типов и степеней заполнения до и после выгрузки с последующим вычислением объема выгруженных отходов. При этом распознают числовые подписи даты, времени и геодезических координат на принятых видеоданных для определения неподвижности мусоровоза, ближайшей площадки первичного накопления и того клиента, которому эта площадка принадлежит. В процессе обработки видеопотока система обработки данных фиксирует события вмешательства в выгрузку контейнеров отходов, а именно, ручную загрузку или выгрузку отходов (пакетов, мешков, коробок) в контейнеры или минуя их непосредственно в зону погрузки мусоровоза. Каждое из таких событий сохраняется в отдельный видеоролик и передается оператору системы для принятия решения о корректировке объема отходов или административных мерах в отношении водителей, поскольку ручная загрузка не разрешена.
По завершении рабочего дня на основании полученной информации осуществляют тарификацию клиентов. По окончании обработки видеозаписей с видеорегистраторов 11 система рассчитывает собранный при выполнении маршрутного задания объем отходов как каждым мусоровозом в отдельности, так и суммарный объем за рабочий день, что позволяет точнее рассчитать себестоимость вывоза отходов в расчете на единицу объема и оценить степень загрузки мусоровозов. Для этого оператор с терминала 5 оператора передает команду модулю 6 создания отчетов на формирование отчета о выполнении маршрутных заданий. Модуль 6 создания отчетов извлекает из модуля 3 хранения данных информацию о назначенных маршрутных заданиях, посещении заданных контрольных точек, формирует в табличном виде отчет и передает его на терминал 5 оператора.
Тарификация (выставление счета) клиента выполняется путем суммирования привязанных к его площадке вывезенных объемов отходов за отчетный период (как правило, за месяц). Каждый клиент регистрируется администратором системы обработки данных с назначением имени пользователя и пароля, которые он впоследствии использует для доступа в личный кабинет с возможностью просмотра текущего баланса, выставленных счетов и отдельных роликов выгрузки контейнеров отходов и рассчитанных значений объема с возможностью настройки границ отчетного периода.
В процессе обработки видеопотоков с бортовых видеорегистраторов 11 мусоровозов в контуре 14 обработки все события и внештатные ситуации от модуля 1 загрузки видеоданных и модуля 2 обработки видеоданных передаются в контур 15 управления на терминал 4 администратора, который протоколирует их в модуле 3 хранения данных и дает возможность администратору системы вручную перезапускать процессы загрузки и обработки видеоданных.
Если в процессе обработки видеопотоков в контуре 14 обработки регистрируются события ручной загрузки или выгрузки отходов, оператор, получив соответствующее уведомление, с помощью 5 терминала оператора загружает сохраненные в модуле 3 хранения данных видеоролики зарегистрированных событий, последовательно просматривает их и, в каждом отдельном случае, выполняет одно из следующих действий:
- корректировку рассчитанного объема выгруженных отходов в сторону уменьшения, если имела место ручная выгрузка из контейнера строительных отходов, сброс которых в контейнеры общего назначения запрещен;
- корректировку рассчитанного объема выгруженных отходов в сторону увеличения и принятие административных мер для водителя, если была произведена ручная загрузка отходов непосредственно в мусоровоз (минуя контейнер).
По завершении работы модуль 2 обработки видеоданных сохраняет соответствующую запись в модуле 3 хранения данных, по наличию которой модуль 6 создания отчетов создает отчет об объемах собранных и вывезенных отходов с группировкой по отдельным мусоровозам и клиентам.
Ежемесячно или по запросу клиента модуль 6 создания отчетов, используя накопленную в модуле 3 хранения данных информацию об объемах собранных и вывезенных отходов с группировкой по клиентам, формирует счета на оплату и через модуль 7 внешнего доступа передает на терминал 13 соответствующего клиента.
По мере необходимости добавления в систему новых клиентов или водителей администратор с помощью терминала 4 администратора создает соответствующие учетные записи в модуле 3 хранения данных, которые впоследствии используются клиентами в процедуре их аутентификации.
Клиент имеет возможность в любое время с использованием web-браузера своего терминала 13 получить доступ к своему личному кабинету. Для этого ему необходимо пройти процедуру аутентификации путем передачи имени пользователя и пароля в модуль 7 внешнего доступа и поиска соответствующей записи в модуле 3 хранения данных. В случае успешной аутентификации на терминал 13 клиента из модуля 7 внешнего доступа передается персонализированная страница, содержащая следующую информацию:
- текущий баланс, выставленные счета;
- поиск и просмотр роликов выгрузки контейнеров отходов и рассчитанных значений объема с возможностью настройки границ отчетного периода;
- запросы относительно корректности определения объема и тарификации, ответы оператора, форма обратной связи для отправки новых запросов.
Контур 14 обработки функционирует следующим образом.
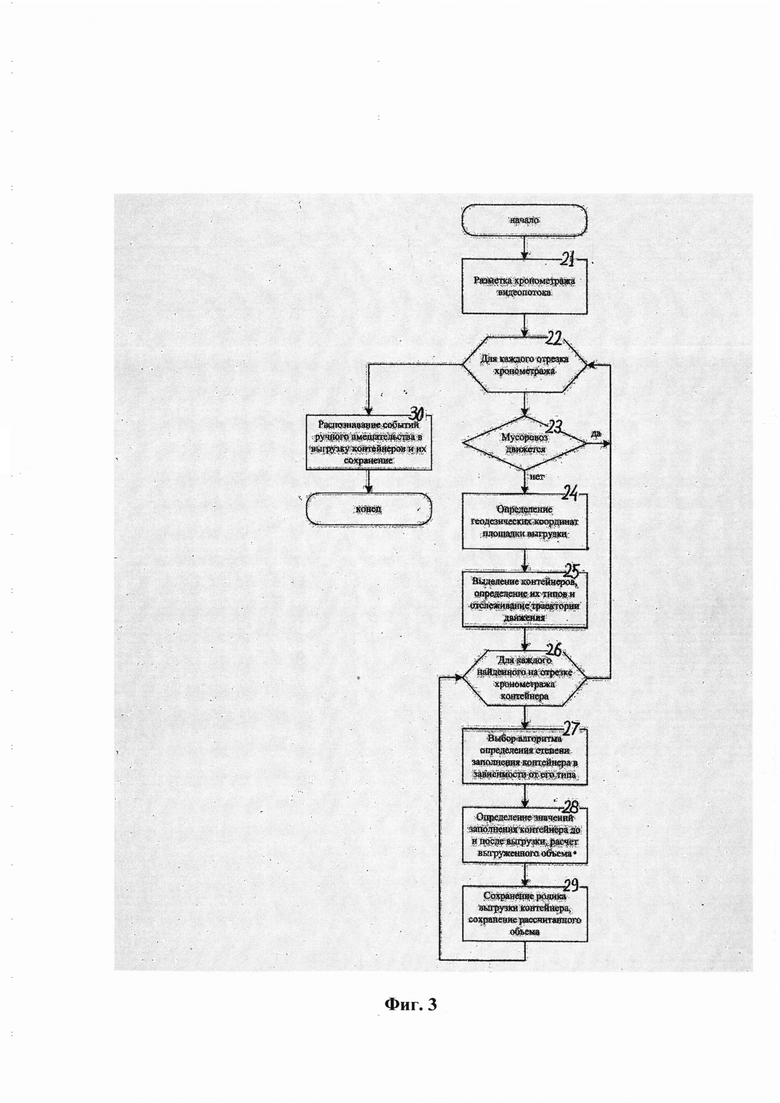
Модуль 1 загрузки видеоданных с использованием беспроводных каналов связи получает видеопоток от бортовых видеорегистраторов 11 всех мусоровозов, находящихся на выполнении маршрутных заданий, и передает их в модуль 2 обработки видеоданных, который функционирует согласно следующему алгоритму (блок-схема алгоритма представлена на Фиг. 3), операции которого пронумерованы соответствующими ссылочными позициями.
Разметка хронометража видеопотока (21) с выделением отрезков, содержащих контейнеры отходов любых известных программе обработки типов. Отрезок хронометража соответствует выгрузке одного или нескольких контейнеров на одной из площадок первичного накопления отходов.
Для каждого из отрезков хронометража (22) после определения того, движется ли мусоровоз (23), определяются геодезические координаты площадки выгрузки (24) путем распознавания соответствующей числовой подписи. Распознавание производится на всех кадрах отрезков хронометража, что позволяет:
- устранить возможные ошибки распознавания отдельных цифр, составляющих числовую подпись;
- минимизировать влияние собственной ошибки приемника системы глобального позиционирования;
- исключить участки хронометража, на которых мусоровоз находится в движении и контейнеры попали в поле зрения «случайно».
Затем, путем решения прямой геодезической задачи выполняется поиск ближайшей площадки вывоза отходов, зарегистрированной в модуле 3 хранения данных, определяется подмножество размещенных на ней типов контейнеров.
Выполняется детальный анализ отрезка хронометража с помощью нейросетевого алгоритма поиска, классификации и отслеживания контейнеров, что позволяет выделить отдельные контейнеры, определить их типы и отследить траекторию движения каждого из них (25) в поле зрения камеры видеорегистратора 11. Выделенное на этапе 21 подмножество типов контейнеров позволяет:
- снизить количество ошибок их классификации;
- определить случаи, когда контейнеры были заменены без согласования.
Исходя из типа каждого отдельно взятого контейнера, найденного на отрезке его хронометража (26), выбирается подходящий нейросетевой алгоритм определения степени заполнения контейнера (27), который выдает одно из следующих значений: 0, 25, 50, 75, 100, 120, 140, 160, 180, 200%. Раздельная настройка алгоритмов применяется для повышения точности, поскольку одно и то же в процентном отношении значение заполнения выглядит по-разному для различных типов контейнеров.
Значения заполнения контейнера определяются непосредственно до и после выгрузки (28), после чего разность данных значений умножается на объем, соответствующий типу контейнера. Рассчитанное таким образом значение объема выгруженного из контейнера отходов вместе с видеороликом процесса выгрузки привязывается к клиенту, являющемуся владельцем площадки размещения контейнеров, и сохраняется в модуле 3 хранения данных (29).
Для каждого отрезка хронометража (22) с помощью отдельного нейросетевого алгоритма распознаются события вмешательства в выгрузку контейнеров отходов, а именно, ручная загрузка или выгрузка отходов (пакетов, мешков, коробок) в контейнеры или минуя их непосредственно в мусоровоз. Каждое из таких событий сохраняется в отдельный ролик (30), помечается кодом типа события и сохраняется в модуле 3 хранения данных для последующего анализа оператором системы.
Контур 16 обучения используется в случае необходимости добавления новых типов баков, изменения градаций степени наполнения, обучения распознаванию новых типов событий или повышения точности работы одного из существующих алгоритмов. Контур 16 обучения функционирует следующим образом.
Для обучения нейросетевых алгоритмов используются видеозаписи, создаваемые модулем 1 загрузки видеоданных. Перечень видеозаписей составляется таким образом, чтобы они содержали требуемый объект или событие, распознаванию которых требуется обучить алгоритмы модуля 2 обработки видеоданных. Специалист по обучению последовательно открывает на терминале 10 обучения видеозаписи, находит требуемый объект, выделяет область его расположения в кадре, тип и степень заполнения (может быть неопределенной), после чего запускает процедуру автоматического слежения за данным объектом модуля 8 подготовки обучающих данных. В процессе слежения модуль 8 подготовки обучающих данных сохраняет кадры с сопровождаемым объектом, каждому из которых сопоставляется файл метаданных, содержащий границы объекта в кадре, его тип и степень заполнения. Сформированные таким образом обучающие данные добавляются в уже существующую обучающую выборку и передаются в модуль 9 обучения, который настраивает параметры нейросетевых алгоритмов модуля 2 обработки видеоданных.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПАССАЖИРСКИХ ПЕРЕВОЗОК | 2022 |
|
RU2784825C1 |
| Система контроля и мониторинга автотранспортных средств | 2020 |
|
RU2738664C1 |
| СЧЕТЧИК ПОДСЧЕТА ПАССАЖИРОВ НА БАЗЕ СТЕРЕОЗРЕНИЯ | 2022 |
|
RU2785198C1 |
| СЧЕТЧИК ПОДСЧЕТА ПАССАЖИРОВ | 2022 |
|
RU2789708C1 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| СТАНЦИЯ ЗАРЯДКИ И СИНХРОНИЗАЦИИ ДАННЫХ МОБИЛЬНЫХ УСТРОЙСТВ | 2020 |
|
RU2781396C2 |
| Информационно-технологический комплекс управления и контроля на маршрутизированном пассажирском транспорте | 2023 |
|
RU2819665C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АВТОМОБИЛЬНОЙ ПАРКОВКОЙ | 2014 |
|
RU2562412C1 |
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |

Группа изобретений относится к системе комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления и к способу, использующему данную систему. Система содержит модуль 1 загрузки видеоданных, модуль 2 обработки видеоданных, модуль 3 хранения данных, терминал 4 администратора, терминал 5 оператора, модуль 6 создания отчетов, модуль 7 внешнего доступа, модуль 8 подготовки обучающих данных, модуль 9 обучения и терминал 10 обучения. Модуль 1 загрузки видеоданных содержит вход, предназначенный для приема по беспроводным каналам связи видеозаписей с видеорегистраторов 11 мусоровозов. Модуль 2 обработки видеоданных содержит вход, подключенный к первому выходу модуля 1 загрузки видеоданных. Вход модуля 3 хранения данных предназначен для приема по беспроводным каналам связи текущих геодезических координат мусоровозов от их бортовых приемников сигнала систем глобального позиционирования, а первый вход-выход подключен к первому входу-выходу модуля 2 обработки видеоданных. Терминал 4 администратора содержит первый вход-выход, подключенный ко второму входу-выходу модуля 3 хранения данных, второй вход-выход, подключенный ко второму входу-выходу модуля 2 обработки видеоданных, и третий вход-выход, соединенный со входом-выходом модуля 1 загрузки видеоданных. Терминал 5 оператора содержит первый вход-выход, подключенный к третьему входу-выходу модуля 3 хранения данных. Модуль 6 создания отчетов содержит вход, соединенный с выходом модуля 3 хранения данных, а вход-выход подключен ко второму входу-выходу терминала 5 оператора. Модуль 7 внешнего доступа содержит первый вход-выход, соединенный с четвертым входом-выходом модуля 3 хранения данных, второй вход-выход, подключенный к третьему входу-выходу терминала 5 оператора, и третий и четвертый входы-выходы, предназначенные для обмена данными, соответственно, с терминалами 12 водителей мусоровозов и с терминалами 13 клиентов. Модуль 8 подготовки обучающих данных содержит вход, подключенный ко второму выходу модуля 1 загрузки видеоданных. Модуль 9 обучения содержит вход, соединенный с выходом модуля 8 подготовки обучающих данных, и первый вход-выход, подключенный к третьему входу-выходу модуля 2 обработки видеоданных. Терминал 10 обучения содержит первый и второй входы-выходы, соединенные, соответственно, со вторыми входами-выходами модуля 9 обучения и входом-выходом модуля 8 подготовки обучающих данных. Технический результат заключается в повышении точности учета объема вывозимых отходов, упрощении процесса установки бортовой системы мониторинга мусоровозов, расширении модельного ряда интегрируемых в систему мусоровозов, повышении точности тарификации клиентов - владельцев контейнеров и повышении степени их информированности о процессе и объеме вывозимых отходов. 2 н.п. ф-лы, 3 ил.
1. Система комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления, содержащая:
- модуль загрузки видеоданных, вход которого предназначен для приема по беспроводным каналам связи видеозаписей с видеорегистраторов мусоровозов;
- модуль обработки видеоданных, вход которого подключен к первому выходу модуля загрузки видеоданных;
- модуль хранения данных, вход которого предназначен для приема по беспроводным каналам связи текущих геодезических координат мусоровозов от их бортовых приемников сигнала систем глобального позиционирования, а первый вход-выход подключен к первому входу-выходу модуля обработки видеоданных;
- терминал администратора, первый вход-выход которого подключен ко второму входу-выходу модуля хранения данных, второй вход-выход подключен ко второму входу-выходу модуля обработки видеоданных, а третий вход-выход соединен со входом-выходом модуля загрузки видеоданных;
- терминал оператора, первый вход-выход которого подключен к третьему входу-выходу модуля хранения данных;
- модуль создания отчетов, вход которого соединен с выходом модуля хранения данных, а вход-выход подключен ко второму входу-выходу терминала оператора;
- модуль внешнего доступа, первый вход-выход которого соединен с четвертым входом-выходом модуля хранения данных, второй вход-выход подключен к третьему входу-выходу терминала оператора, а третий и четвертый входы-выходы предназначены для обмена данными, соответственно, с терминалами водителей мусоровозов и с терминалами клиентов;
- модуль подготовки обучающих данных, вход которого подключен ко второму выходу модуля загрузки видеоданных;
- модуль обучения, вход которого соединен с выходом модуля подготовки обучающих данных, а первый вход-выход подключен к третьему входу-выходу модуля обработки видеоданных;
- терминал обучения, первый и второй входы-выходы которого соединены, соответственно, со вторым входами-выходами модуля обучения и входом-выходом модуля подготовки обучающих данных.
2. Способ комплексной автоматизации процессов сбора, транспортировки и учета количества отходов с мест первичного накопления с использованием системы по п. 1, заключающийся в том, что:
- оснащают каждый мусоровоз видеорегистратором, сопряженным с приемником сигнала систем глобального позиционирования;
- размещают видеорегистратор каждого мусоровоза таким образом, чтобы поле зрения камеры видеорегистратора покрывало все пространство выгрузки контейнеров отходов;
- производят видеосъемку видеорегистратором непрерывно, начиная от момента выезда мусоровоза на маршрут и до момента его возвращения;
- дополняют каждый кадр видеозаписи, полученной в процессе видеосъемки, числовыми подписями геодезических координат мусоровоза, даты и времени видеосъемки;
- формируют в начале рабочего дня для каждого мусоровоза маршрутные задания, каждое из которых содержит до двух десятков площадок первичного накопления отходов;
- отправляют сформированные маршрутные задания водителям для выполнения;
- в процессе выполнения каждого маршрутного задания осуществляют передачу видеоданных с видеорегистратора конкретного мусоровоза по беспроводным каналам связи в систему обработки данных;
- анализируют видеоданные с видеорегистратора каждого мусоровоза для поиска и отслеживания отдельных контейнеров, определения их типов и степеней заполнения до и после выгрузки с последующим вычислением объема выгруженных отходов;
- распознают числовые подписи даты, времени и геодезических координат на видеоданных для определения неподвижности мусоровоза, ближайшей площадки первичного накопления и клиента, которому она принадлежит;
- осуществляют на основании полученной информации тарификацию клиентов;
- обеспечивают доступ клиентов через личные кабинеты к выставленным счетам и роликам выгрузки контейнеров.
| CN 102521665 A, 27.06.2012 | |||
| US 11315085 B2, 26.04.2022 | |||
| JP 6785513 B2, 18.11.2020 | |||
| US 10594991 B1, 17.03.2020 | |||
| Способ автоматизированного беспроводного мониторинга состояния мусорного контейнера | 2020 |
|
RU2739076C1 |
| СИСТЕМА УЧЁТА, НАВИГАЦИИ И МОНИТОРИНГА ОБЪЕКТОВ | 2017 |
|
RU2648967C1 |

