Предлагаемое техническое решение относится к средствам реализации методов неразрушающего контроля и исследования качества материалов и изделий, и может быть использовано для обнаружения в их внутренней структуре локальных дефектов.
Существует большое количество методов и средств обнаружения нарушений внутренней структуры материалов в процессе их неразрушающего контроля (дефектоскопия), основанные на различных физических принципах, связанные с анализом изменения результатов взаимодействия физических полей с контролируемым материалом. Методы и соответствующие устройства обнаружения дефектов в процессе неразрушающего контроля подробно раскрыты во многих информационных источниках, например, И.Н. ЕРМОЛОВ, Н.П. АЛЕШИН, А.И. ПОТАПОВ. Неразрушающий контроль. Акустические методы контроля. Кн. 2. - М.: Высшая школа, 1991, с. 92-95.
Методы дефектоскопии и устройства их реализации имеют свои особенности и области применения, но при этом включают одну общую операцию - выделение в контролируемом материале областей, имеющих характеристики, отличные от основного материала. Задача обнаружения подобных «дефектных» областей значительно усложняется в случаях сложной формы поверхности изделий и сложной внутренней конструкции, большими габаритными размерами изделий, случайным разбросом характеристик материала изделий по их поверхности и т.п.
Одним из наиболее эффективных методов неразрушающего контроля является ультразвуковая дефектоскопия, и одной ее разновидностей, позволяющей получить высокое разрешение на широком диапазоне глубины исследуемого материала, является лазерно-ультразвуковая дефектоскопия и соответствующие устройства, где применен оптико-акустический преобразователь, и в которых генератор лазерных импульсов используется в качестве инициатора акустических колебаний.
Известен лазерно-ультразвуковой дефектоскоп (Патент РФ №2232983), который содержит импульсный лазер, соединенный через оптическое волокно с оптико-акустическим преобразователем, а также пьезоприемник, соединенный через усилитель с аналого-цифровым преобразователем, подключенным к компьютеру. К недостаткам известного устройства следует отнести необходимость пропускания излучения лазера сквозь приемник ультразвука, что создает значительные трудности при практической реализации.
Известны лазерно-ультразвуковые дефектоскопы (см., например, патенты РФ №:2544257 и №2653123), содержащие импульсный лазер, соединенный посредством оптоволоконного кабеля с оптико-акустическим преобразователем, расположенным на поверхности исследуемого объекта, пьезоприемник в виде решетки из локальных пьезоэлементов, соединенный с аналого-цифровым преобразователем, и вычислительное устройство.
Известные устройства работают следующим образом.
Импульсный лазер генерирует световые импульсы определенной энергии с частотой в заданном диапазоне. После их передачи по системе доставки лучи проходят через оптически прозрачную решетку и попадают на оптико-акустический преобразователь. При поглощении лазерных импульсов за счет нестационарного теплового расширения возбуждаются акустические импульсы. Акустические импульсы, распространяются в глубь исследуемой среды от поверхности исследуемого материала и отражаются от искомых неоднородностей (дефектов), отраженные волны регистрируются решеткой, составленной из пьезоэлементов, преобразуются в электрические импульсы и передаются на аналого-цифровой преобразователь. Усиленные сигналы обрабатываются вычислительным устройством, с получением в итоге двумерного изображения исследуемого материала.
Недостатком известных устройств является невозможность исследования с их помощью протяженных трехмерных объектов.
Наиболее близким к предлагаемому техническому решению, представляющего блок лазерно-ультразвуковой дефектоскопа, является устройство, описанное в патенте РФ №2381496. Сам дефектоскоп содержит импульсный лазер, соединенный через оптоволокно с оптико-акустическим преобразователем, а также пьезоприемник, соединенный через усилитель с аналого-цифровым преобразователем, подключенным к компьютеру, при этом оптико-акустический преобразователь выполнен в виде единого блока, расположенного на исследуемом объекте, и содержит пластину оптико-акустического генератора, помещенную между исследуемым объектом и преобразователем.
Известный дефектоскоп работает следующим образом. Оптико-акустический генератор приводится в акустический контакт с исследуемым объектом. Лазерный импульс поступает с лазера через оптоволокно, оптическую систему, фаску и прозрачное тело цилиндра на пластину оптико-акустического генератора. Последний излучает акустический импульс в прозрачный цилиндр и исследуемый объект. Рассеянные в объекте акустические импульсы через оптико-акустический генератор и прозрачный цилиндр попадают на пьезоприемник, и его электрический сигнал, усиленный усилителем, поступает в аналого-цифровой преобразователь. Устройство позволяет исследовать объект непосредственно в месте его расположения.
К недостаткам устройства следует отнести необходимость пропускания излучения лазера сквозь пластину оптико-акустического генератора, что создает значительное тепловыделение, а также повышает временной интервал между измерениями, необходимый для охлаждения пластины во избежание ее плавления.
Также известен роботизированный лазерно-ультразвуковой структуроскоп, описанный в патенте РФ на полезную модель №205036, с принципом действия, аналогичному вышеописанному устройству, при этом отличие заключается в закреплении преобразователя на роботизированной подвижной платформе манипулятора.
К преимуществам данного устройства можно отнести высокую точность роботизированного позиционирования преобразователя на исследуемой поверхности с фиксацией координат по сравнению с ручным способом.
К недостаткам следует отнести то, что развертка и установка роботизированного механизма не может быть выполнена оперативно, устройство требует отдельной наладки и базирования в непосредственной близости от исследуемого объекта. Кроме того, устройству необходима трехмерная модель исследуемой поверхности для задания алгоритма перемещения, что вызывает трудности при наличии поврежденных и деформированных участков.
Технические задачи, на решение которых направлено заявляемое устройство, являются: 1) возможность анализа состояния исследуемых объектов протяженных размеров и различной кривизны непосредственно в местах их размещения без дополнительной настройки органов позиционирования;
2) повышение производительности сканирования поверхности исследуемого объекта.
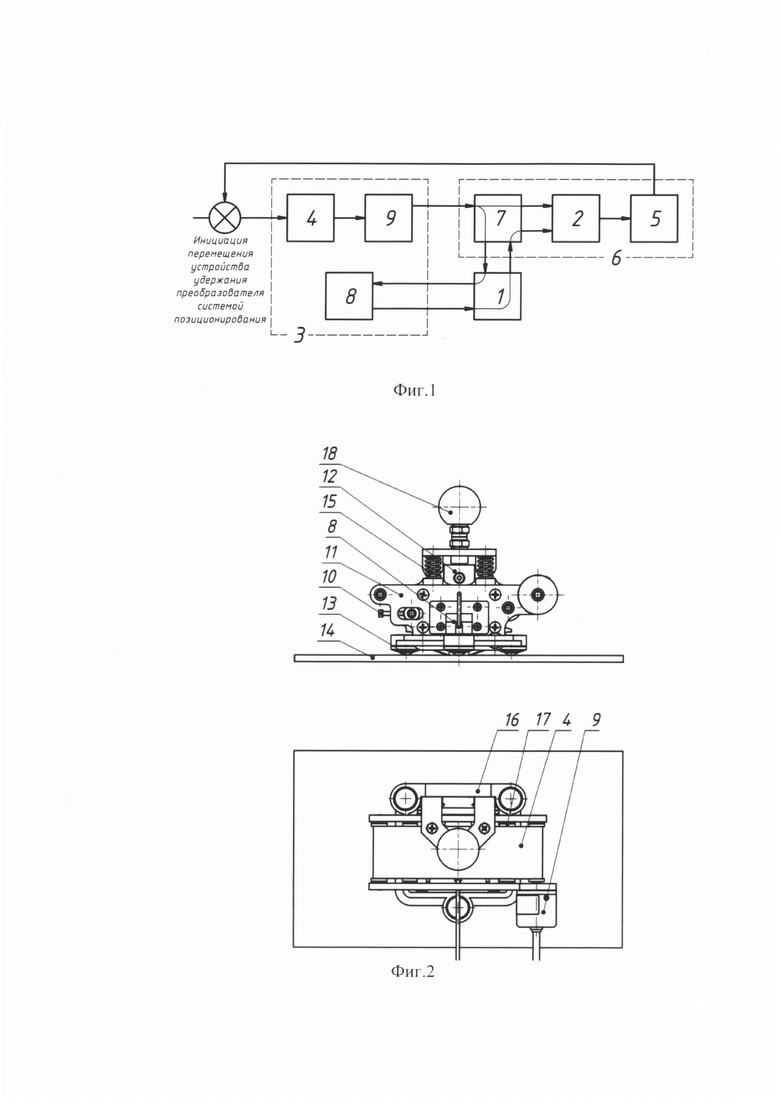
Рабочая блок-схема дефектоскопа представлена на фигуре 1. Система позиционирования инициирует перемещение удерживающего устройства 3 оптико-акустического преобразователя (ОАП) 8 по поверхности образца, что приводит к перемотке ленты 4, вращающей ролик с энкодером 9. Сигнал от энкодера поступает на компьютер (ПК) 6 в систему вычисления 7, которая анализирует пройденное преобразователем расстояние и посылает сигнал в оптико-электронный блок 1, генерирующий пучок лазерных импульсов для преобразователя 8, излучающего при этом зондирующий ультразвуковой сигнал. Отраженный ультразвуковой сигнал поступает обратно в оптико-акустический преобразователь, где трансформируется в электрический сигнал, который поступает в оптико-электронный блок и, преобразуясь в системе вычисления, помещается в буфер хранения 2 вместе с данными о пройденном расстоянии. В результате сканирования получается изображение исследованной области в окне визуализации 5. По полученным визуальным данным система позиционирования принимает решение о необходимости продолжения сканирования.
Рабочая схема заявляемого преобразователя представлена на фигуре 2.
Удерживающее устройство совмещенное с ОАП содержит в себе раму 16, которая базируется на поверхности образца 14 по трем точками при помощи шаровых опор 13. На раме имеется подвижная консоль 11, которая вертикально перемещается по направляющему рельсу 12, прижимая оптико-акустический преобразователь 8 перпендикулярно к поверхности образца с помощью пружин 15. Для обеспечения высокой производительности дефектоскопа через ОАП в конструкции консоли предусмотрена эластичная кольцевая лента 4, перематываемая по системе роликов 17 при движении дефектоскопа по образцу, натяжение ленты регулируется винтом 10. Движение устройства обеспечивается автоматизированной системой позиционирования или пользователем при помощи ручки 18, пройденное расстояние фиксируется энкодером 9.
Предлагаемое устройство отличается от известного тем, что оптико-акустический генератор, используемый в составе прототипа (патент РФ №2381496), выполненный в виде плоскопараллельной пластины и находящийся в непосредственном контакте с поверхностью образца, предлагается заменить на входящую в состав ОАП устройства удержания преобразователя подвижную кольцевую ленту из материала, обладающего аналогичными характеристиками теплового расширения и акустического импеданса. Наличие рамы 16 с тремя шаровыми опорами 13, позиционирующими устройство удержания преобразователя по трем точкам, а также подпружиненной консоли 11, непосредственно фиксирующей преобразователь, позволит компенсировать криволинейность исследуемой поверхности образца, сохраняя силу прижима преобразователя. Таким образом, с точки зрения качества отдельных измерений различия между устройствами будут минимальны, однако, при произведении многократных измерений по прямой линии поверхности образца, предлагаемое устройство будет превосходить прототип, который требует ручного позиционирования, за счет производительности. Конвективный отвод тепла от ленты при ее перемотке будет положительно сказываться на уменьшении интервалов измерений в отличии от статичной пластины в известном устройстве, для охлаждения которой понадобится больше времени и отвод преобразователя от образца. Поэтому измерения можно проводить, используя каждый участок ленты, равный по длине статичной пластине. Максимальная скорость измерений достигается при столь быстрой перемотке резиноподобной, в частности, полимерной ленты с перемещением дефектоскопа, когда следующий участок ленты успел охладиться до максимально допустимой температуры реализации измерения. Наличие энкодера позволяет расставить измерения (снимки) согласно установленном интервалу. Наличие ручки 18 позволяет прямолинейно перемещать дефектоскоп по поверхности образца. Принимая время допустимого охлаждения пластины оптико-акустического генератора равным времени охлаждения участка ленты, равного по ширине пластине, можно вычислить преимущество предлагаемого решения над существующим:
N=L/d, где
L - длина ленты,
d - ширина пластины,
N - максимальное количество измерений дефектоскопа с лентой за интервал времени для одного измерения дефектоскопа с пластиной.
При этом решаются задачи фиксации пройденного расстояния путем включения энкодера в систему роликов, перематывающих ленты, что позволяет составить точную расстановку кадров, полученных в результате сканирования, также снижается температурная нагрузка на преобразователь, что позволяет нарастить мощность излучателя для получения более четкой картины сканирования.
Анализ структуры исследуемого объекта с помощью заявляемого устройства реализуется следующим образом.
Дефектоскоп располагают в непосредственной близости от исследуемого объекта, преобразователь сопрягают с поверхностью исследуемого объекта и прижимают с помощью ручки 18 в точке, принимаемой за начало координат.
При этом оптико-акустический преобразователь 8 позиционируется перпендикулярно к исследуемой поверхности за счет трехточечной опоры устройства удержания. При этом оптико-акустический генератор, представляющий собой в данном случае гибкую кольцевую ленту, располагается таким образом, что продолжение пути его перемотки затрагивает интересующую для сканирования область.
В случаях, когда поверхность исследуемого объекта имеет кривизну, полное сопряжение поверхности оптико-акустического преобразователя с поверхностью объекта достигается за счет системы пружин, а также заполнения зазора контактной средой, добавляемой при помощи дозатора.
Начальное положение приемно-излучающего модуля на объекте определяется энкодером 9, его координаты через систему вычисления 7 поступают в устройство обработки информации, в качестве которого выступает компьютер с соответствующим программным обеспечением. Передача данных может осуществляться как проводным, так и беспроводным образом.
Непосредственно процесс исследования происходит следующим образом.
Лазерный импульс поступает из источника лазерного излучения (напрямую, или же через оптическую систему доставки, например, оптоволоконный кабель) в оптико-акустический преобразователь. Последний излучает акустический импульс внутрь исследуемого объекта. Отраженные в объекте акустические импульсы попадают обратно в преобразователь, а его электрический сигнал поступает в оптико-электронный блок и далее через буфер хранения в окно визуализации.
Для перемещения дефектоскопа по поверхности исследуемого объекта используется ручка 18, что приводит к перемотке ленты 4, вращающей ролик с энкодером 9. Сигнал от энкодера поступает на ПК 6 в систему вычисления 7, которая анализирует пройденное преобразователем расстояние и посылает сигнал в оптико-электронный блок 1, генерирующий пучок лазерных импульсов для оптико-акустического преобразователя 8, излучающего при этом зондирующий ультразвуковой сигнал. Отраженный ультразвуковой сигнал поступает обратно в оптико-акустический преобразователь, где трансформируется в электрический сигнал, который поступает в оптико-электронный блок и, преобразуясь в системе вычисления, помещается в буфер хранения 2 вместе с данными о пройденном расстоянии. В результате сканирования получается изображение исследованной области в окне визуализации 5.
На фигуре 3 представлено визуальное изображение участка поверхности материала объекта с дефектом (вид сверху, два сечения, распределение сигнала).
Таким образом, заявленный оптико-акустический преобразователь предоставляет возможность анализа состояния исследуемых объектов протяженных размеров и различной кривизны непосредственно в местах их размещения без дополнительной настройки органов позиционирования, при этом по сравнению с прототипом повышается производительность и тем самым эффективность лазерно-ультразвукового дефектоскопа при сканировании поверхности исследуемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсно-периодического лазерно-ультразвукового контроля твердых материалов и устройство для его осуществления | 2017 |
|
RU2653123C1 |
| ЛАЗЕРНЫЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 2010 |
|
RU2544257C2 |
| Устройство для лазерно-акустического контроля твердых и жидких сред | 2018 |
|
RU2732470C2 |
| ЛАЗЕРНО-УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 2008 |
|
RU2381496C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2214590C2 |
| Способ определения структурных характеристик изделий из полимерных композиционных материалов и устройство для его осуществления | 2023 |
|
RU2809932C1 |
| СПОСОБ ЛАЗЕРНО-АКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232983C2 |
| СПОСОБ ЛАЗЕРНОЙ ОПТИКО-АКУСТИЧЕСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2486501C2 |
| СПОСОБ ЛАЗЕРНО-УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА ПАЯНЫХ СОЕДИНЕНИЙ | 2013 |
|
RU2545348C2 |

Использование: для неразрушающего контроля материалов и изделий. Сущность изобретения заключается в том, что оптико-акустический преобразователь лазерно-ультразвукового дефектоскопа включает оптико-акустический генератор, при этом преобразователь совмещен с удерживающим устройством, а входящий в его состав оптико-акустический генератор представляет собой гибкую кольцевую ленту, которая внутренней поверхностью контактирует с выходной сканирующей поверхностью преобразователя и может скользить по ней, а внешней поверхностью контактирует с поверхностью объекта контроля, ведомо перематываясь по системе роликов в процессе перемещения преобразователя по поверхности исследуемого объекта, при этом пройденное преобразователем расстояние измеряется энкодером, установленным на одном из роликов, обеспечивающих перемотку ленты, при этом удерживающее оптико-акустический преобразователь устройство имеет в своем корпусе три точки опоры для его позиционирования на поверхности объекта контроля, а сам оптико-акустический преобразователь с системой роликов располагается на подпружиненной консоли, обеспечивающей прижатие преобразователя через ленту оптико-акустического генератора по нормали к поверхности объекта контроля. Технический результат: обеспечение возможности анализа состояния протяженных объектов различной кривизны непосредственно в местах их размещения без дополнительной настройки органов позиционирования, а также повышение производительности сканирования дефектоскопом поверхности исследуемого объекта. 3 ил.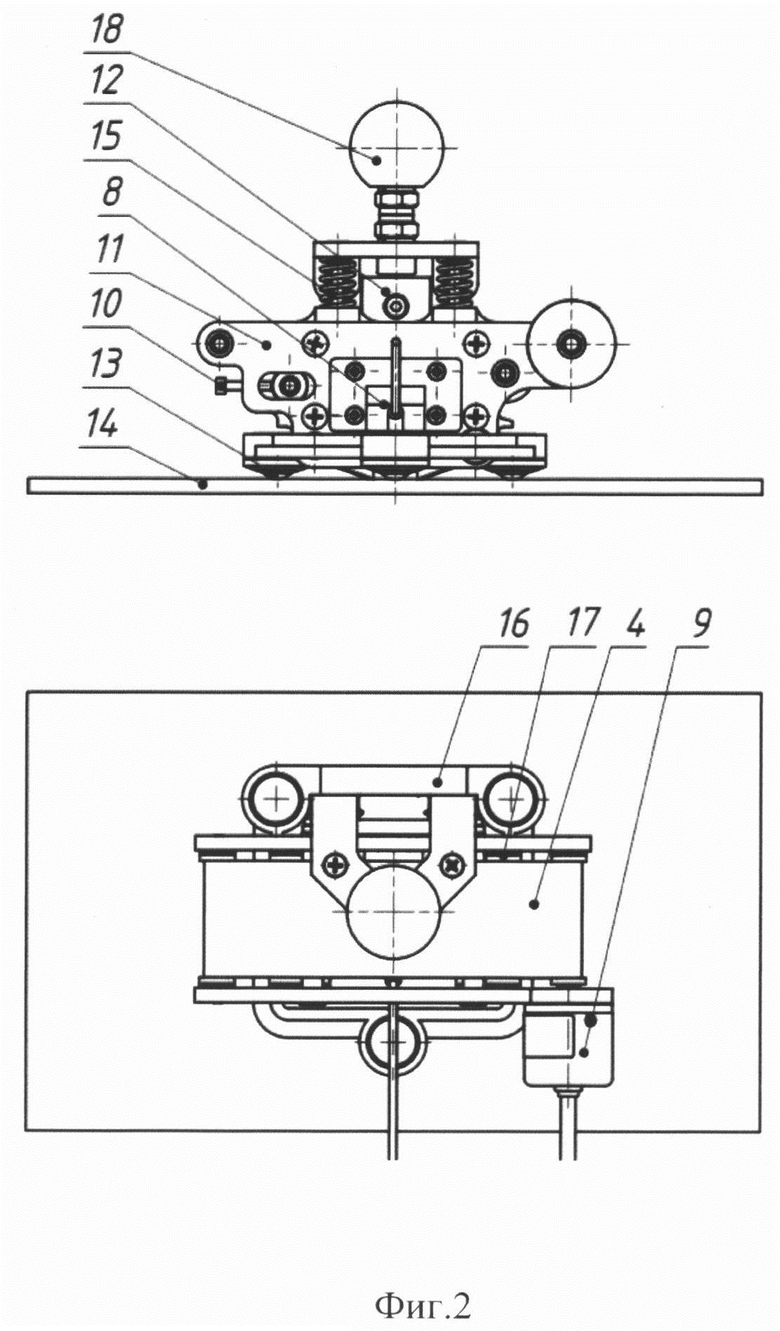
Оптико-акустический преобразователь лазерно-ультразвукового дефектоскопа, включающий оптико-акустический генератор, отличающийся тем, что преобразователь совмещен с удерживающим устройством, а входящий в его состав оптико-акустический генератор представляет собой гибкую кольцевую ленту, которая внутренней поверхностью контактирует с выходной сканирующей поверхностью преобразователя и может скользить по ней, а внешней поверхностью контактирует с поверхностью объекта контроля, ведомо перематываясь по системе роликов в процессе перемещения преобразователя по поверхности исследуемого объекта, при этом пройденное преобразователем расстояние измеряется энкодером, установленным на одном из роликов, обеспечивающих перемотку ленты, при этом удерживающее оптико-акустический преобразователь устройство имеет в своем корпусе три точки опоры для его позиционирования на поверхности объекта контроля, а сам оптико-акустический преобразователь с системой роликов располагается на подпружиненной консоли, обеспечивающей прижатие преобразователя через ленту оптико-акустического генератора по нормали к поверхности объекта контроля.
| ЛАЗЕРНО-УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 2008 |
|
RU2381496C1 |
| СПОСОБ ЛАЗЕРНО-АКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232983C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ СОЕДИНЕНИЯ ДЕТАЛЕЙ ИНТЕГРАЛЬНЫХ КОНСТРУКЦИЙ ИЗ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 2003 |
|
RU2262099C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2214590C2 |
| US 5457997 A, 17.10.1995 | |||
| US 5381695 A, 17.01.1995. | |||

