Техническое решение относится к области использования беспилотных летательных аппаратов (БПЛА), в частности к системам удаленного наблюдения и управления БПЛА.
В настоящее время широкое распространение получают различные системы и способы доставки товаров и грузов с помощью БПЛА.
Известна система навигации БПЛА, описанная в патенте США №8626361, опубликованном 25.11.2008. В известной системе первый БПЛА содержит данные, представляющие собой маршрут полета первого БПЛА и наземную станцию. Наземная станция принимает данные с БПЛА, представляющие собой, маршрут полета первого БПЛА, рассчитывает маршрут полета для второго БПЛА, таким образом, чтобы траектории полета первого БПЛА и второго БПЛА не пересекались, и передает рассчитанный маршрут полета на второй БПЛА.
Известна система учета положения БПЛА, описанная в патенте США №8386175, опубликованном 18.03.2010. Известная система включает в себя систему отчетности управления воздушным движением (УВД) в сочетании с наземной станции управления (НСУ), УВД включает в себя систему автоматической трансляции наблюдения за БПЛА и информации о трафике услуг вещания, приемопередатчик и один или более телекоммуникационных модемов. НСУ выполнена с возможностью приема данных о позиции БПЛА в воздушном пространстве и сообщает позицию БПЛА в воздушном пространстве оператору УВД или в коммуникационный центр через приемопередатчик. УВД также может быть выполнен с возможностью отображения положения БПЛА в воздушном пространстве, на одном или более экранах.
Известна система управления БЛА, описанная в патенте США №8521339, опубликованном 08.04.2010. В известной системе организована удаленная связь между БПЛА и базовой станцией. БПЛА передает на базовую станцию свои координаты с привязкой к карте, базовая станция определяет вектора скорости для БПЛА и направляет БПЛА в соответствии с определенным вектором скорости до тех пор, пока БПЛА не достигнет цели.
Известна система безопасности полетов БПЛА в гражданском воздушном пространстве, описанная в патенте США №8838289, опубликованном 07.02.2008. Известная система включает в себя: наземную станция оснащенную системой технического зрения; БПЛА; удаленный оператор, управляющий наземной станцией; канал связи между БПЛА и наземной станцией; систему на борту БПЛА для обнаружения присутствия и положение вблизи воздушных судов и передачи этой информации удаленному оператору.
Наиболее близкой по своей технической сущности является транспортная система доставки, использующая БПЛА, описанная в патенте США №9384668, опубликованном 30.01.2014. Система доставки, включает в себя БПЛА и сеть наземных станций для контроля и мониторинга доставки. Наземная станция включает в себя место для взаимодействия между БПЛА, средствами приема и упаковки объектов, перевозимых БПЛА и пользователями. В некоторых вариантах осуществления БПЛА могут автономно перемещаться от одной наземной станции на другую. В некоторых вариантах осуществления наземные станции оборудованы навигационными средствами, которые помогают БПЛА определить положение наземной станции с повышенной точностью.
Тем не менее, ни одна из известных систем не обеспечивает наблюдение и управление БПЛА в режиме реального времени, за счет базовых станций, оборудованных средствами видеонаблюдения, не зависимо от информации, полученной с БПЛА.
Задача, решаемая заявленным техническим решением, состоит в создании системы наблюдения и управления БПЛА, в которой управление осуществляется за счет визуальной информации о БПЛА, полученной при помощи сети станций организации и управления (СОУ).
Технический результат заявленного технического решения совпадает с указанной задачей.
В общем виде система удаленного наблюдения и управления БПЛА представляет собой набор видеокамер, расставленных на местности так, чтобы каждый БПЛА находился в зоне видимости хотя бы одной из видеокамер. Такая система позволяет осуществлять доставку грузов и другие полеты БПЛА, в режиме реального времени, получая информацию о маршруте полета и состоянии БПЛА, не зависимо от информации, полученной с БПЛА.
Заявленное техническое решение поясняется следующими чертежами.
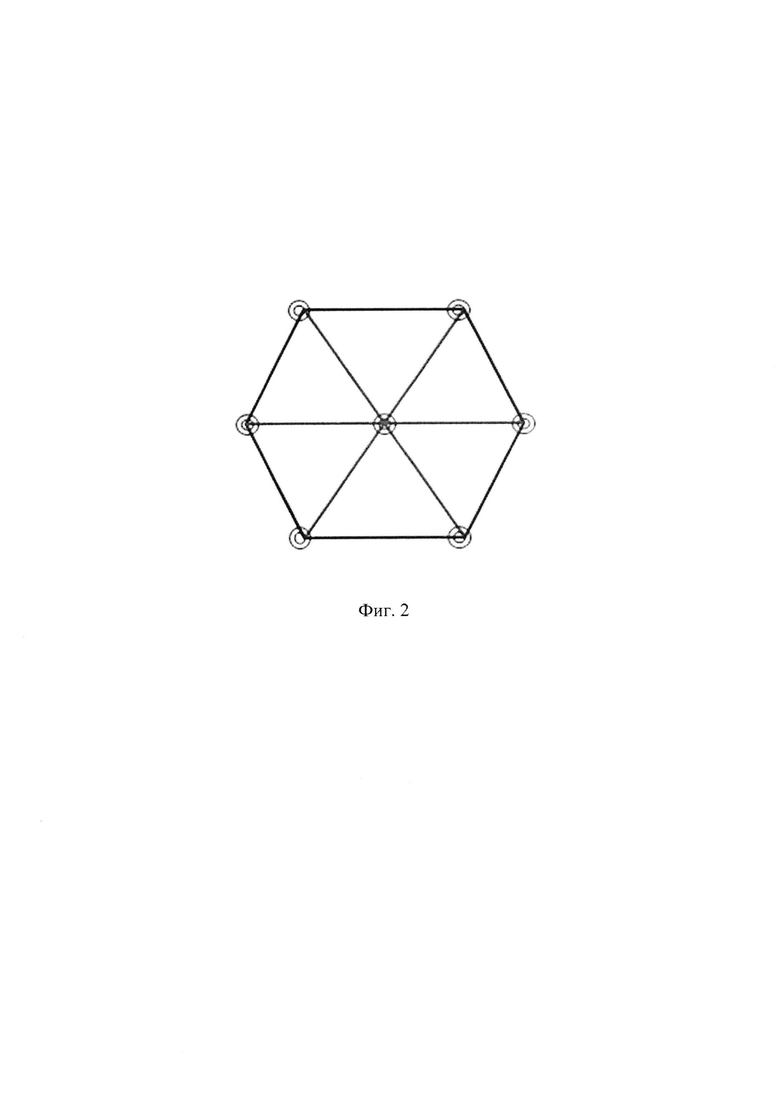
На фиг. 1 приведена обобщенная схема прохождения БПЛА через зоны ответственности СОУ.
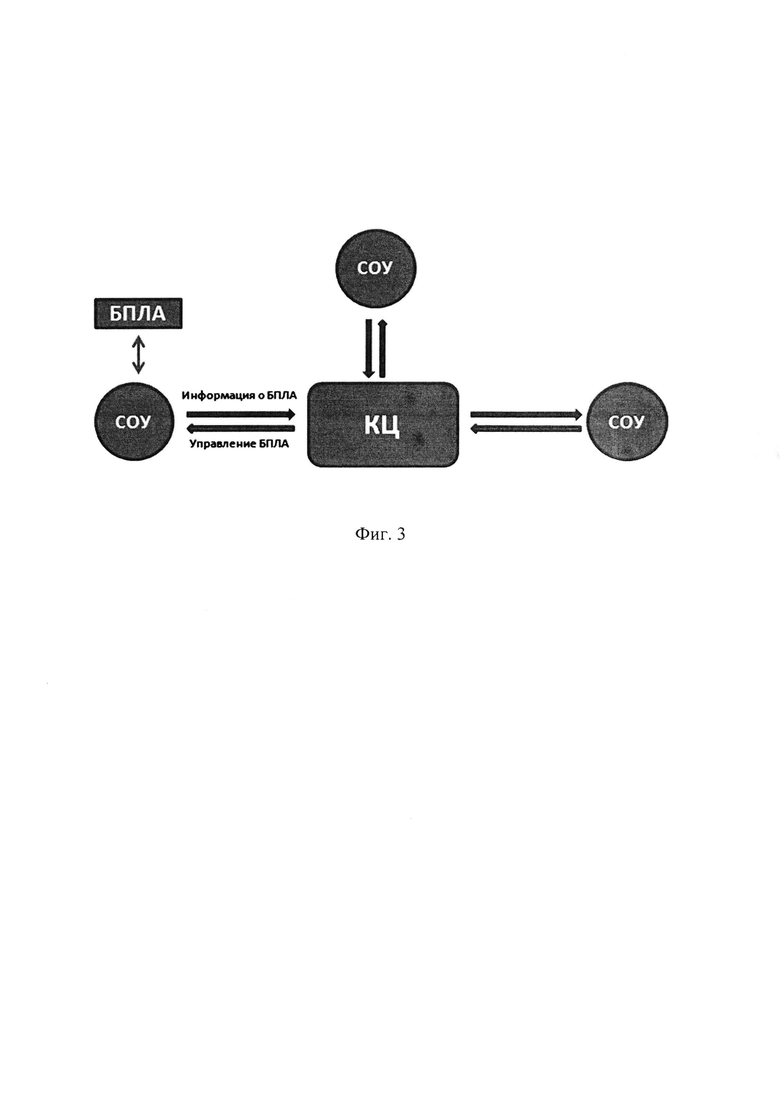
На фиг. 2 приведена схема размещения СОУ.
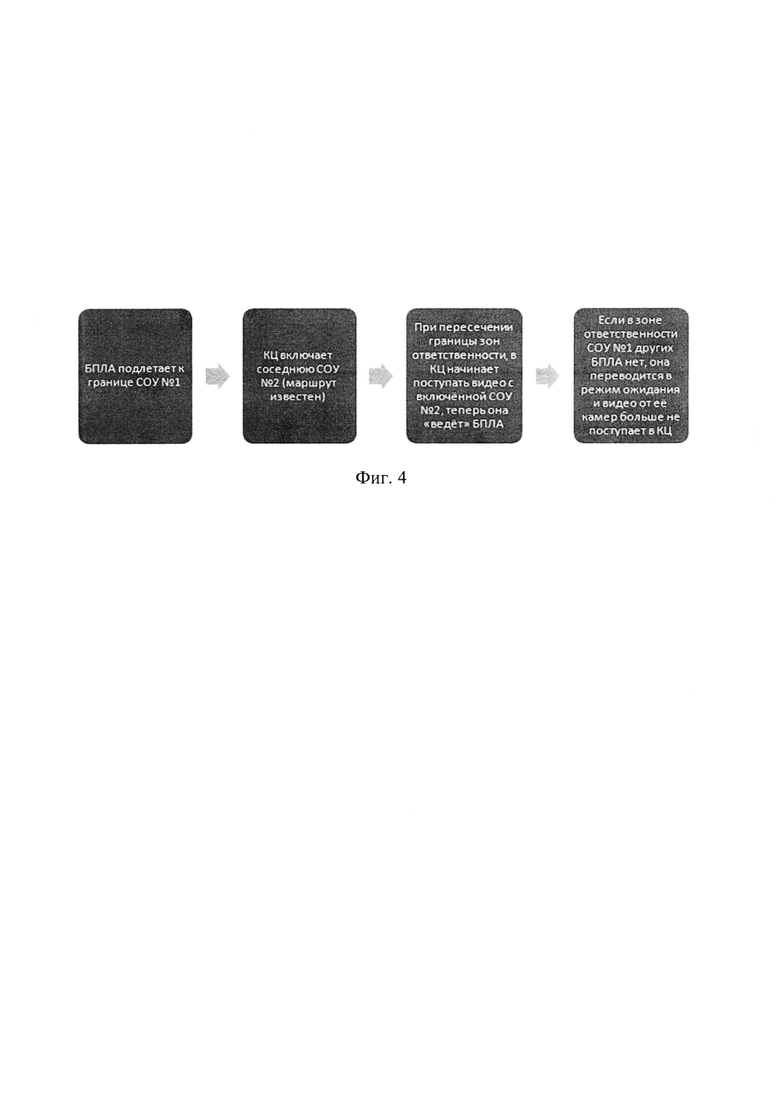
На фиг. 3 приведена обобщенная схема заявленной системы удаленного контроля и управления БПЛА.
На фиг. 4 приведен обобщенный алгоритм работы заявленной системы удаленного контроля и управления БПЛА.
Система удаленного контроля и управления БПЛА включает в себя сеть станций организации и управления (СОУ), причем каждая СОУ сети включает в себя по меньшей мере одну камеру кругового обзора, по меньшей мере один радиочастотный приемопередатчик, систему обработки и передачи информации, блок стационарного питания, предназначенный для подключения СОУ к сети электроснабжения, блок альтернативного питания; по меньшей мере один контрольный центр (КЦ), выполненный с возможностью сбора информации о БПЛА и выработки команд управления БПЛА, при этом КЦ включает в себя систему обработки видеосигнала, по меньшей мере один монитор, автоматизированное рабочее место оператора (АРМ), по меньшей мере один радиочастотный приемопередатчик, блок стационарного питания, предназначенный для подключения КЦ к сети электроснабжения.
Сеть СОУ размещена на местности по сотовому принципу, таким образом, чтобы любая точка пространства на высоте не более 200 метров от уровня поверхности находилась в зоне видимости по меньшей мере одной камеры кругового обзора СОУ.
Блок альтернативного питания может быть выполнен как источник бесперебойного питания (ИБП) или источник возобновляемой энергии (ИВЭ), например солнечная батарея, или аккумулятор, или ветрогенератор, или топливный генератор.
Система обработки видеосигнала выполнена с возможностью добавления отметки о наличии БПЛА в зоне видимости по меньшей мере одной СОУ в видеосигнал, поступающий от по меньшей мере одной СОУ.
Система обработки видеосигнала выполнена с возможностью наносить отметку с координатами БПЛА на карту района, отображающуюся на мониторе КЦ.
Система обработки видеосигнала выполнена с возможностью переключать мониторы КЦ для отображения видеосигнала при переходе БПЛА из зоны ответственности одной СОУ в зону ответственности другой СОУ.
Система обработки видеосигнала выполнена с возможностью переключать на мониторе КЦ вывод видеосигнала, поступающего от одной СОУ, на вывод видеосигнала, поступающего от другой СОУ, при переходе БПЛА из зоны ответственности одной СОУ в зону ответственности другой СОУ.
Система обработки видеосигнала выполнена с возможностью рассчитывать зону ответственности СОУ в соответствии с погодными условиями, качеством видеосигнала и сигнала связи.
КЦ включает в себя по меньшей мере одно хранилище данных, предназначенное для хранения данных, поступающих от СОУ, и программы, содержащей программные инструкции, по меньшей мере один процессор, предназначенный для выполнения программных инструкций, содержащихся в программе.
Хранилище данных может быть локальным устройством для хранения данных или облачным хранилищем данных.
Программные инструкции включают в себя инструкции для расчета маршрута каждого БПЛА в соответствии с данными о точке его назначения, наличии в зоне ответственности каждой СОУ других БПЛА, загруженностью каждого КЦ, качеством связи и погодными условиями.
Программные инструкции включают в себя инструкции для анализа загрузки и качества работы каждой СОУ, причем по результатам указанного анализа программа создает рекомендации по изменению количества СОУ, места расположения СОУ и аппаратуры, входящей в состав СОУ.
КЦ вырабатывает сигналы управления БПЛА при помощи выполнения указанных программных инструкций, при этом КЦ может послать запрос оператору на подтверждение автоматического управления БПЛА или осуществлять автоматическое управление БПЛА без подтверждения.
Для создания системы наблюдения и управления флотом БПЛА на местности размещается сеть станций организации и управления (СОУ). СОУ представляет собой одну или несколько камер кругового обзора, радиопередатчики и систему обработки и передачи информации. В частности, СОУ может размещаться на столбе освещения, на крыше, как дополнение к сотовой вышке и другим установленным конструкциям, не имеющим отношения к системе. Сеть размещается по сотовому принципу, таким образом, чтобы любая точка пространства на высоте не более 200 м от уровня поверхности находилась на расстоянии прямой видимости хотя бы от одной СОУ (т.е. в зоне ее видимости). В другой возможной реализации расстояние между СОУ выбирают таким образом, чтобы любая точка пространства на высоте не более 200 м от уровня поверхности находилась на расстоянии прямой видимости хотя бы от двух СОУ для повышения надежности наблюдения за флотом БПЛА. В качестве примера, размещение СОУ производится по схеме в виде вершин равносторонних треугольников со стороной, выбранной так, чтобы любая точка пространства на высоте не более 200 м от уровня поверхности находится на расстоянии прямой видимости хотя бы от одной СОУ (т.е. в зоне видимости) или двух СОУ.
Каждая СОУ подключена к сети электроснабжения и имеет источник бесперебойного питания (ИБП). Опционально, СОУ комплектуется солнечными батареями для независимого электропитания.
Оператор находится в контрольном центре (КЦ) и контролирует информацию поступающую с СОУ. КЦ может быть несколько. В КЦ из каждой СОУ стекается информация: видеосигнал от камер кругового обзора с отмеченным на нем одним или несколькими БПЛА; карта района с отмеченными на нем БПЛА. Связь оператор - БПЛА (двусторонняя) осуществляется по маршруту КЦ - ближайшая к данному БПЛА СОУ - БПЛА. При переходе БПЛА из зоны ответственности одной СОУ в зону ответственности соседней, в КЦ приходит сигнал и начинается трансляция от соседней СОУ. Трансляция со старой прекращается, если в ее зоны ответственности не осталось ни одного БПЛА.
Заказы на доставку грузов поступают в единый центр, который собирает заказ и запускает БПЛА, по заданным координатам маршрута - далее БПЛА управляется только сетью СОУ и КЦ.
Оператор КЦ в любой момент времени видит:
- Видео со всех СОУ, в чьей зоне ответственности есть хотя бы один БПЛА, с отметками позиции БПЛА на видео;
- Карту зоны ответственности с отметками ведомых БПЛА;
- Отчет о состоянии каждой СОУ и каждого БПЛА в зоне ответственности.
Таким образом, в любой момент времени БПЛА находится в зоне видимости оператора КЦ и он имеет возможность управлять БПЛА в режиме реального времени по каналу двухсторонней связи.
Управление БПЛА также может осуществляться КЦ в автоматическом режиме.
Алгоритм управления БПЛА осуществляется следующим образом:
БПЛА находится в начальной точке пространства. Опционально, на земле/аэродроме/базе. Оператор задает точку, в которую должен прилететь БПЛА. Опционально, оператор задает несколько точек, которые должен «посетить» БПЛА. Опционально, оператор задает несколько точек, где последняя точка совпадает с начальным положением БПЛА (возврат на аэродром/базу). Заданная точка или набор точек поступают в КЦ. КЦ автоматически прокладывает маршрут БПЛА. КЦ может послать запрос оператору на подтверждение маршрута. При прокладывании маршрута КЦ решает задачу оптимизации с учетом информации, поступающей от подчиненных СОУ, телеметрии БПЛА и состояния других БПЛА в зоне ответственности КЦ:
- количества других БПЛА в зоне ответственности различных СОУ - для снижения вероятности столкновения;
- погодных условий в зоне ответственности СОУ - для минимизации воздействия погоды на БПЛА;
- состояния БПЛА и других БПЛА - состояния узлов/агрегатов и количество топлива (заряда аккумулятора).
При решении задачи оптимизации маршрутов КЦ может разводить несколько БПЛА не только по маршруту (минимизация пересечения нескольких маршрутов в зоне ответственности одной СОУ), но и по высоте полета.
После решения задачи оптимизации маршрута БПЛА, КЦ подает сигнал БПЛА на взлет либо на старт, при этом КЦ может послать запрос оператору на подтверждение взлета. БПЛА начинает двигаться по маршруту. При прокладывании маршрута после решения задачи оптимизации маршрута БПЛА, КЦ может изменить маршрут других БПЛА. Для этого КЦ через СОУ подает сигнал другим БПЛА на изменение маршрута. КЦ может послать оператору запрос на подтверждение изменения маршрутов, либо изменить маршруты самостоятельно без подтверждения.
КЦ, в режиме реального времени, получает телеметрию от БПЛА. При возникновении неполадок или внешних условий, делающих продолжение полета опасным или невозможным, КЦ отдает сигнал на принудительную посадку БПЛА, при этом КЦ может послать запрос оператору на подтверждение принудительной посадки или осуществить ее самостоятельно без подтверждения.
Телеметрия может быть использована для расчета задач оптимизации маршрута БПЛА, появившихся в зоне ответственности КЦ позже (следующих в очереди на взлет/старт).
КЦ транслирует оператору визуальную информацию с каждой СОУ, в зоне ответственности которой есть хотя бы один БПЛА. Управление БПЛА может осуществляться оператором и/или КЦ в автоматическом режиме.
КЦ может отдавать автоматическое распоряжение БПЛА, находящимся в зоне ответственности, на увеличение или уменьшение скорости полета для решения задачи оптимизации маршрута, при этом КЦ может послать запрос оператору на подтверждение увеличения или уменьшения скорости полета или осуществить ее самостоятельно без подтверждения.
КЦ может отдавать автоматическое распоряжение БПЛА, находящимся в зоне ответственности, на увеличение/уменьшение скорости полета и изменение маршрута без появления нового БПЛА в зоне ответственности. Такая ситуация может возникнуть при изменении погодных условий в зоне ответственности (информация получаемая с СОУ), возникновении помех полету, помех связи, поломки СОУ и т.д.
При этом КЦ решает задачу оптимизации маршрута БПЛА, рассматривая БПЛА, которому нужно изменить маршрут/состояние полета, как новый БПЛА.
Заявленное техническое решение промышленно применимо, поскольку использует промышленно изготовленные и промышленно применимые ресурсы и компоненты.
Хотя заявленное техническое решение описано конкретным примером его реализации, это описание не является ограничивающим, но приведено лишь для иллюстрации и лучшего понимания существа технического решения, объем которого определяется прилагаемой формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2793713C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| БЕСПИЛОТНОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА ФУТБОЛЬНЫХ ФАНАТИКОВ С ФАЙЕРАМИ | 2022 |
|
RU2809665C2 |
| Способ обнаружения и распознавания малоразмерных объектов на изображениях при помощи алгоритма машинного обучения и устройство для его реализации | 2022 |
|
RU2799078C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |

Система удаленного контроля и управления беспилотными летательными аппаратами (БПЛА) содержит сеть станций организации и управления, контрольный центр. Станция организации и управления содержит камеру кругового обзора, радиочастотный передатчик, систему обработки и передачи информации, блок стационарного питания, блок альтернативного питания. Контрольный центр содержит систему обработки видеосигнала, монитор, автоматизированное рабочее место оператора, радиочастотный приемопередатчик, блок стационарного питания. Обеспечивается наблюдение за БПЛА и управление в режиме реального времени. 12 з.п. ф-лы, 4 ил.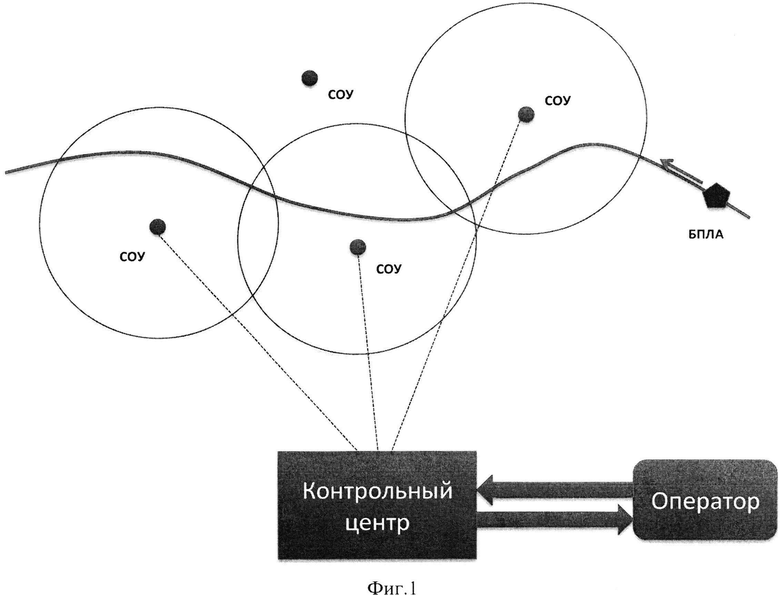
1. Система удаленного контроля и управления беспилотными летательными аппаратами (БПЛА) включает в себя сеть станций организации и управления (СОУ), причем каждая СОУ сети включает в себя по меньшей мере одну камеру кругового обзора, по меньшей мере один радиочастотный приемопередатчик, систему обработки и передачи информации, блок стационарного питания, предназначенный для подключения СОУ к сети электроснабжения, блок альтернативного питания; по меньшей мере один контрольный центр (КЦ), выполненный с возможностью сбора информации о БПЛА и выработки команд управления БПЛА, причем КЦ включает в себя систему обработки видеосигнала, по меньшей мере один монитор, автоматизированное рабочее место оператора (АРМ), по меньшей мере один радиочастотный приемопередатчик, блок стационарного питания, предназначенный для подключения КЦ к сети электроснабжения.
2. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что сеть СОУ размещена на местности по сотовому принципу таким образом, чтобы любая точка пространства на высоте не более 200 метров от уровня поверхности находилась в зоне видимости по меньшей мере одной камеры кругового обзора СОУ.
3. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что блок альтернативного питания включает в себя источник бесперебойного питания (ИБП) и/или источник возобновляемой энергии (ИВЭ).
4. Система удаленного контроля и управления БПЛА по п. 3, отличающаяся тем, что ИВЭ включает в себя солнечную батарею, и/или аккумулятор, и/или ветрогенератор, и/или топливный генератор.
5. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что система обработки видеосигнала выполнена с возможностью добавления отметки о наличии БПЛА в зоне видимости по меньшей мере одной СОУ в видеосигнал, поступающий от по меньшей мере одной СОУ.
6. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что система обработки видеосигнала выполнена с возможностью наносить отметку с координатами БПЛА на карту района, отображающуюся на мониторе КЦ.
7. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что система обработки видеосигнала выполнена с возможностью переключать мониторы для отображения видеосигнала при переходе БПЛА из зоны ответственности одной СОУ в зону ответственности другой СОУ.
8. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что система обработки видеосигнала выполнена с возможностью переключать на мониторе КЦ вывод видеосигнала, поступающего от одной СОУ, на вывод видеосигнала, поступающего от другой СОУ, при переходе БПЛА из зоны ответственности одной СОУ в зону ответственности другой СОУ.
9. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что система обработки видеосигнала выполнена с возможностью рассчитывать зону ответственности СОУ в соответствии с погодными условиями, качеством видеосигнала и сигнала связи.
10. Система удаленного контроля и управления БПЛА по п. 1, отличающаяся тем, что КЦ включает в себя по меньшей мере одно хранилище данных, предназначенное для хранения данных, поступающих от СОУ, и программы, содержащей программные инструкции, по меньшей мере один процессор, предназначенный для выполнения программных инструкций, содержащихся в программе.
11. Система удаленного контроля и управления БПЛА по п. 10, отличающаяся тем, что программные инструкции включают в себя инструкции для расчета маршрута каждого БПЛА в соответствии с данными о точке его назначения, наличии в зоне ответственности каждой СОУ других БПЛА, загруженностью каждого КЦ, качеством связи и погодными условиями.
12. Система удаленного контроля и управления БПЛА по п. 10, отличающаяся тем, что программные инструкции включают в себя инструкции для анализа загрузки и качества работы каждой СОУ, причем по результатам указанного анализа программа создает рекомендации по изменению количества СОУ, места расположения СОУ и аппаратуры, входящей в состав СОУ.
13. Система удаленного контроля и управления БПЛА по п. 10, отличающаяся тем, что хранилище данных включают в себя локальное устройство для хранения данных и/или облачное хранилище.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| US 9412278 B1, 09.08.2016 | |||
| US 9384668 B2, 05.07.2016. | |||

