Изобретение относится к беспилотным летательным аппаратам с двумя и более винтами, а именно к летательным аппаратам с вертикальным взлетом и посадкой, характеризующихся специальным использованием [МПК B64C29/00, B64C39/00, B64C39/024, B64C39/02, B64C27/08].
Из уровня техники известен ГИБРИДНЫЙ МУЛЬТИКОПТЕР И ЛЕТАТЕЛЬНЫЙ АППАРАТ С НЕПОДВИЖНЫМ КРЫЛОМ [CN 108602559, опубл.: 28.09.2018], который состоит из корпуса и мультикоптера. Корпус имеет как минимум одно крыло. Мультикоптер вращательно крепится к корпусу вокруг оси мультикоптера. Мультикоптер включает в себя множество роторов, расположенных и управляемых для вращения вокруг оси мультикоптера.
Также из уровня техники известен МУЛЬТИКОПТЕР [KR20200134390, опубл.: 02.12.2020], который имеет форму пластины или диска с обтекаемой конструкцией, в которой верхняя и нижняя поверхности симметричны, имеющие приемное пространство, в которое могут загружаться товары, и сформированные в конструкцию, в которой верхняя и нижняя стороны приемного пространства могут быть открыты и закрыты; множество приводных частей, установленных по окружности фюзеляжа для создания тяги при вращении; часть управления, установленная внутри фюзеляжа для управления вращением движущих частей и часть блока питания, установленная внутри фюзеляжа для питания приводных частей.
Наиболее близким по технической сущности является БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЧЕТЫРЬМЯ ПОВОРОТНЫМИ ДВИГАТЕЛЯМИ [RU71960, опубл.: 27.03.2008], который представляет собой свободнонесущее крыло с четырьмя поворотными двигателями, систему управления, двигательную установку и полезную нагрузку. При этом двигательная установка состоит из четырех поворотных двигателей, расположенных симметрично относительно оси аппарата и вне его, жестко соединенных осями с планером и независимо управляемых от единой системы управления, а двигатели расположены таким образом, что центр масс аппарата расположен симметрично между осями двигателей, причем система управления и элементы питания двигательной установки равномерно занимают весь свободный объем свободнонесущего крыла, а полезная нагрузка размещается на поверхности крыла.
Основной технической проблемой аналогов и прототипа является отсутствие возможности интеграции дополнительного оборудования в корпус, а также низкое обеспечение курсовой устойчивости и маневренности в полёте.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является интеграция всего навесного дополнительного оборудования в корпус, за счет чего улучшаются аэродинамические качества в полете, а также обеспечение устойчивости и курсовой маневренности за счет двухуровневого расположения двигателей с пропеллерами, относительно вертикали корпуса.
Указанный технический результат достигается за счет того, что мультикоптер, состоящий из корпуса, на который соединены двигатели с пропеллерами, которые снабжены защитой для пропеллеров, отличающийся тем, что с торцевых сторон корпуса расположены слоты для контейнеров с дополнительным оборудованием, куда в свою очередь вставлены контейнеры c дополнительным оборудованием, а двигатели с пропеллерами расположены на двух уровнях относительно вертикали корпуса.
В частности, корпус мультикоптера выполнен в виде монокрыла.
В частности, защита для пропеллеров также обеспечивает функцию дополнительных стабилизаторов в полёте.
В частности, двигатели с пропеллерами удалены от центра тяжести мультикоптера вверх и вниз.
Краткое описание чертежей.
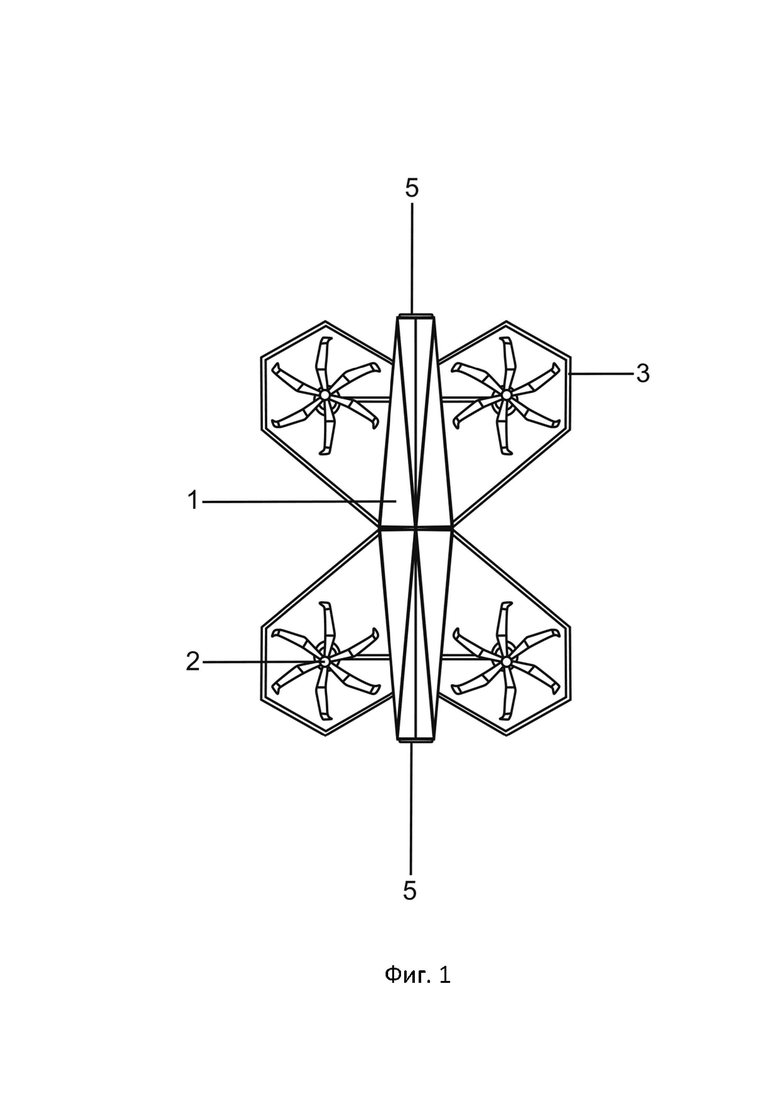
На фиг. 1 показан внешний вид сверху мультикоптера.
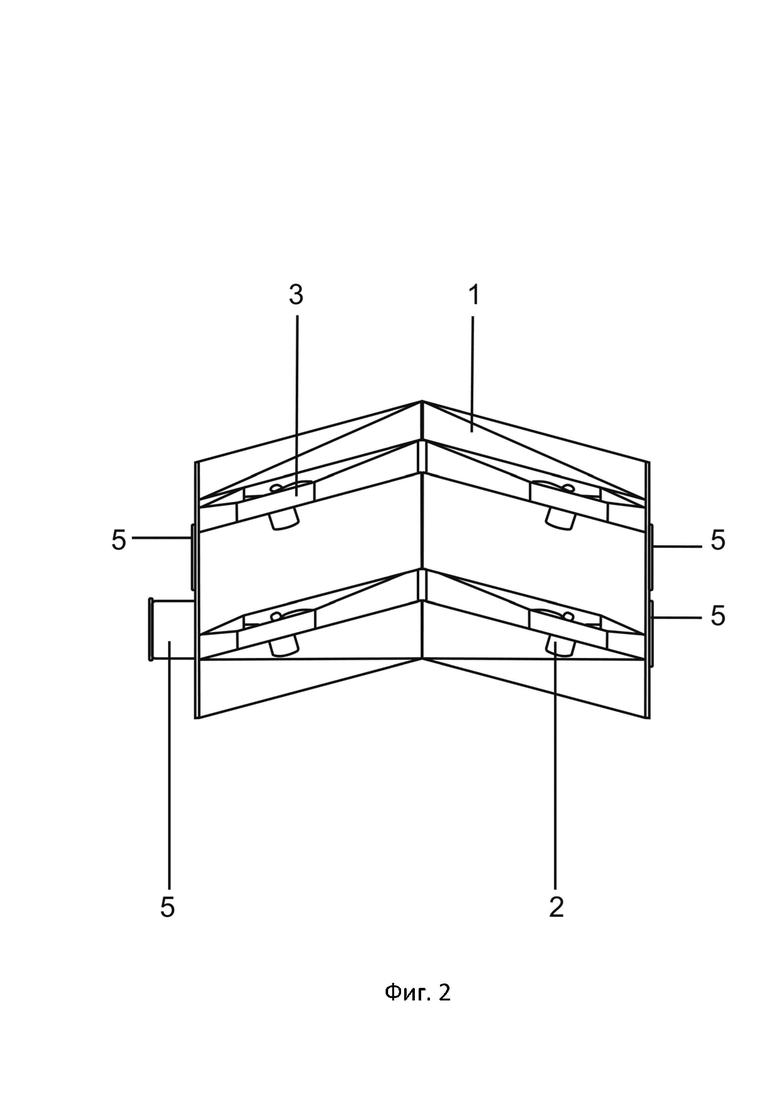
На фиг.2 показан внешний вид сбоку с вынутым контейнером для дополнительного оборудования мультикоптера.
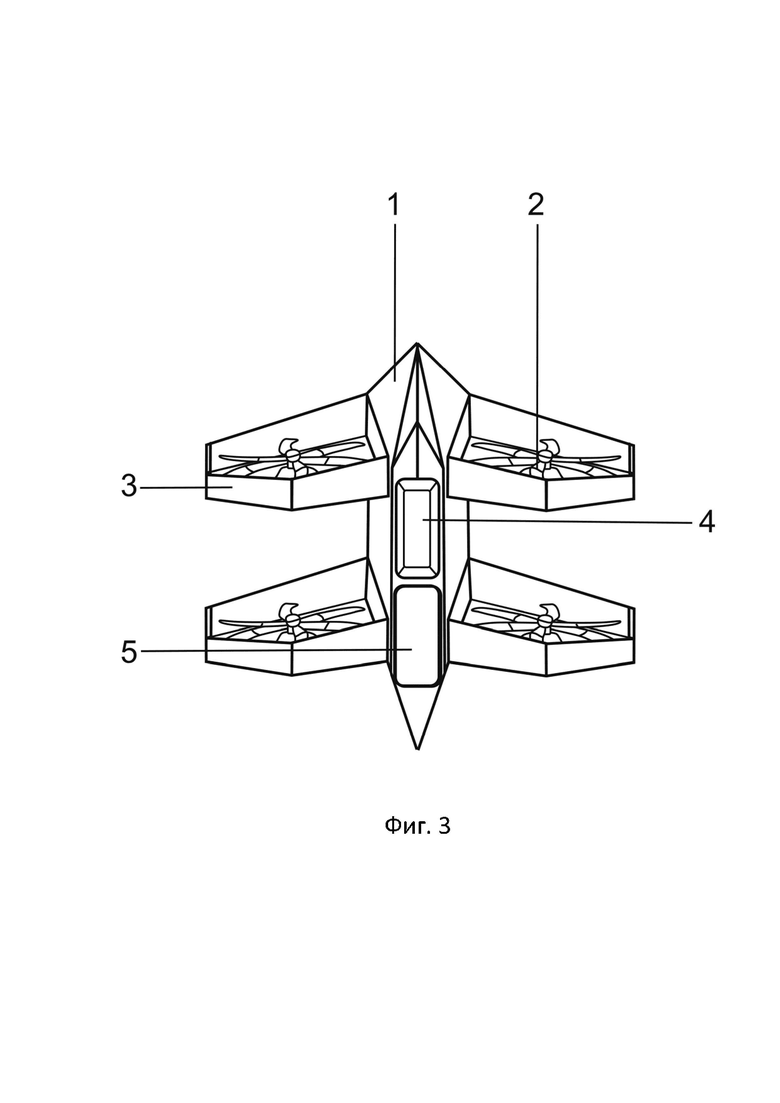
На фиг. 3 показан внешний вид спереди с одним пустым слотом для контейнера с дополнительным оборудованием мультикоптера.
На фигурах обозначено: 1 - корпус, 2 - двигатель с пропеллером, 3 - защита пропеллера, 4 - слот для контейнера с дополнительным оборудованием, 5 - контейнер с дополнительным оборудованием.
Осуществление изобретения
Мультикоптер, с возможностью вертикального взлета и посадки, управляемый дистанционно или с помощью заранее заложенной программы, состоит из корпуса 1, который выполнен в виде монокрыла, на который соединены двигатели с пропеллерами 2, которые расположены на двух уровнях относительно вертикали корпуса 1, в свою очередь снабжены защитой для пропеллеров 3 выполняющие также роль стабилизаторов во время полета, с торцевых сторон корпуса расположены слоты для контейнеров с дополнительным оборудованием 4, куда в свою очередь вставлены контейнеры c дополнительным оборудованием 5.
Запуск мультикоптера может проводиться с любой ровной поверхности. Кроме того, он может осуществляться как по командам оператора, так и с помощью заранее заложенной программы.
Запуск двигателей с пропеллерами 2 при старте осуществляется по команде оператора или автоматически. При запуске мультикоптера двигатели с пропеллерами 2 начинают свою работу. Как только суммарная тяга, создаваемая двигателями с пропеллерами 2, превысит стартовый вес мультикоптера, он отрывается от поверхности и начинает совершать подъем до набора нужной высоты. Так как оси валов двигателей с пропеллерами 2 проходят через центр масс мультикоптера, то в процессе его подъема аппарат является статически устойчивым.
При необходимости мультикоптер зависает в воздухе над заданной точкой. Для этого двигатели с пропеллерами 2 работают таким образом, чтобы мультикоптер расположился над заданной точкой поверхности. Затем по команде они переводятся в режим зависания.
По команде системы управления двигатели с пропеллерами 2 переводятся в режим горизонтального полета, во время которого корпус 1 используется как крыло. Режим горизонтального полета предназначен для перемещения на дальние расстояния. При этом защита пропеллеров 3 также обеспечивает функцию дополнительных стабилизаторов в полете.
Также мультикоптер имеет две полетные конфигурации.
В одной конфигурации основная тяга приходится на группу двигателей с пропеллерами 2 находящихся на верхнем уровне, выше центра тяжести. Предназначена для точного позиционирования мультикоптера в пространстве и обеспечивает устойчивость при выполнении некоторых задач, таких как прицеливание, фото и видео фиксация, использование устройств сброса и направленной стрельбы.
В другой конфигурации основная тяга приходится на группу двигателей с пропеллерами 2 находящихся на нижнем уровне, ниже центра тяжести. Предназначена для увеличения возможностей курсовой маневренности, облета препятствий, уклонения от движущихся тел создающих помехи полету.
Приземление мультикоптера осуществляется при переводе двигателей с пропеллерами 2 в режим взлета и посадки. При этом мульткоптер плавно приземляется.
Все функциональное дополнительное оборудование мультикоптера располагается внутри корпуса в специально предназначенных слотах 4 для контейнеров с дополнительным оборудованием 5, которые выполнены в виде стандартизированных по массе и габаритам контейнеров с универсальными разъемами для подключения электронной системы управления мультикоптером к дополнительному оборудованию, размещенному в контейнерах.
Таким образом заявляемый мультикоптер обладает улучшенными аэродинамическими свойствами при возможности использования дополнительного оборудования, а также устойчивостью и курсовой маневренностью в полете, за счет чего может найти широкое применение в различных сферах деятельности, где требуется применение коптеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2754277C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| Летательный аппарат на базе свободного подвеса биплана с мультироторной системой | 2024 |
|
RU2839620C1 |
| Беспилотное воздушное судно-перехватчик | 2024 |
|
RU2840166C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов вертикального взлета и посадки. Мультикоптер состоит из корпуса, который выполнен в виде монокрыла, на который соединены двигатели с пропеллерами. Двигатели с пропеллерами расположены на двух уровнях относительно вертикали корпуса и снабжены защитой пропеллеров, выполняющие также роль стабилизаторов во время полета. С торцевых сторон корпуса расположены слоты для контейнеров с дополнительным оборудованием, куда в свою очередь вставлены контейнеры c дополнительным оборудованием. Обеспечивается интеграция всего навесного дополнительного оборудования в корпус, за счет чего улучшаются аэродинамические качества в полете, а устойчивость и курсовая маневренность - за счет двухуровневого расположения двигателей с пропеллерами. 3 з.п. ф-лы, 3 ил.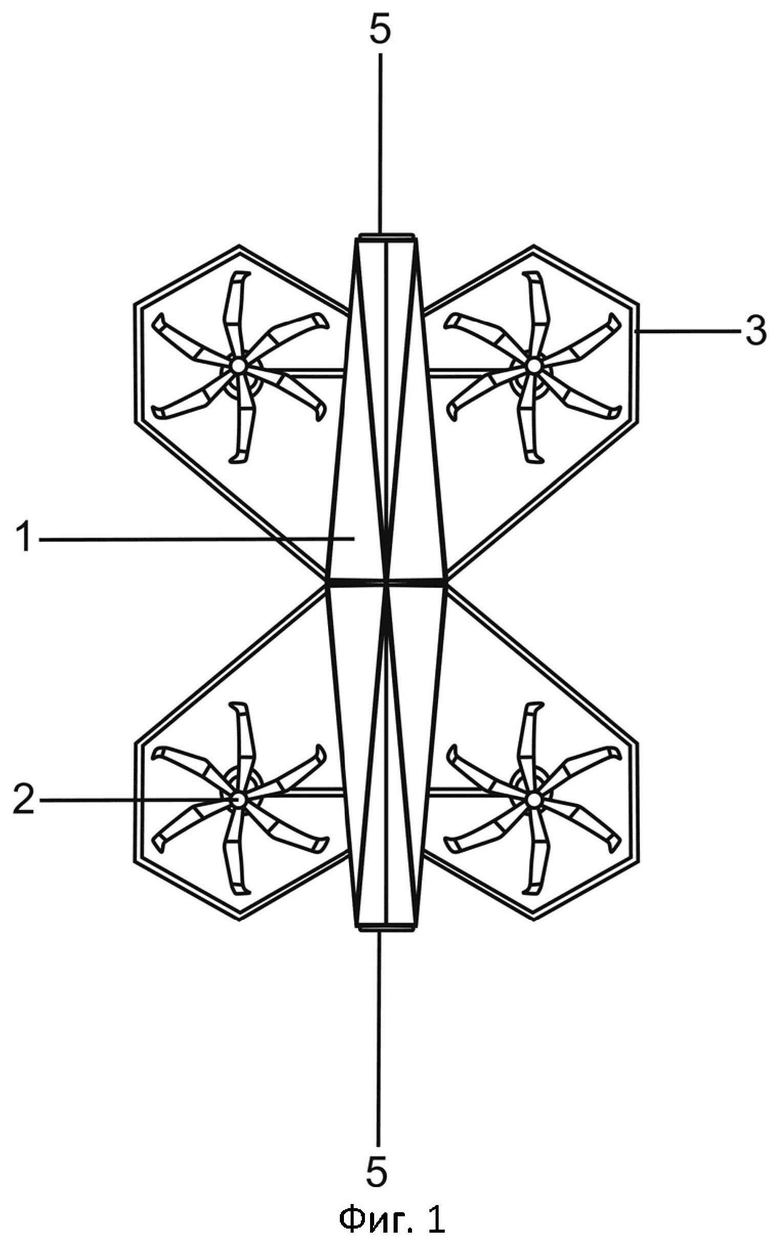
1. Мультикоптер, состоящий из корпуса, на который соединены двигатели с пропеллерами, которые снабжены защитой для пропеллеров, отличающийся тем, что с торцевых сторон корпуса расположены слоты для контейнеров с дополнительным оборудованием, куда в свою очередь вставлены контейнеры c дополнительным оборудованием, а двигатели с пропеллерами расположены на двух уровнях относительно вертикали корпуса.
2. Мультикоптер по п. 1, отличающийся тем, что корпус выполнен в виде монокрыла.
3. Мультикоптер по п. 1, отличающийся тем, что защита для пропеллеров также обеспечивает функцию дополнительных стабилизаторов в полёте.
4. Мультикоптер по п. 1, отличающийся тем, что двигатели с пропеллерами удалены от центра тяжести мультикоптера вверх и вниз.
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| КОМПАУНД ДЛЯ ГЕРМЕТИЗАЦИИ ТОНКИХ ЭЛЕМЕНТОВ ЭЛЕКТРОННОЙ ТЕХНИКИ | 0 |
|
SU209611A1 |
| ТЕМПЕРАТУРНЫЙ ПЕРМЕАМЕТР | 0 |
|
SU168376A1 |
| US 20200364456 A1, 19.11.2020 | |||
| EA 201691854 A1, 28.04.2017. | |||

