Изобретение относится к летательным аппаратам комбинированного типа, осуществляющим вертикальный взлет и посадку в мультироторном режиме и горизонтальный полет в режиме самолета с опорой на несущие поверхности крыльев.
Развитие малой авиации в настоящее время определяется успехами в области мультироторных систем, что определяется простыми и линейными алгоритмами управления вектором тяги, а также миниатюризацией датчиковой аппаратуры. Главными недостатками мультироторных систем в сравнении с самолетными являются более высокие удельные затраты энергии, относительно низкая скорость и меньшая дальность полета. Выигрыш по энергетическим затратам от использования крыльев при горизонтальном полете определяется аэродинамическим качеством аппарата.
Основными недостатками самолетов по сравнению с мультироторными системами являются потребность во взлетно-посадочной полосе и наличие критических углов, при превышении которых происходит потеря управляемости аппаратом. Также к недостаткам можно отнести зависимость эффективности маневрирования элеронами и рулями от скорости встречного потока воздуха, что повышает сложность управления как в пилотируемом, так и беспилотном режимах. Сильнее всего это проявляется на взлете и посадке при существенных ограничениях по допустимым отклонениям от параметров траектории. Возможность зависания в воздухе и осуществления вертикального взлета или посадки является несомненным преимуществом мультироторных систем.
Для объединения достоинств мультироторных и самолетных систем в одном устройстве активно используются гибридные схемы, когда аппараты оснащаются и движителями для вертикального полета, и движителями для горизонтального. До массового внедрения электрических мультироторных систем гибридная схема с независимыми вертикальными и горизонтальными винтовыми движителями была реализована в автожире, но она не обеспечивала вертикального взлета.
Из уровня техники известен многовинтовой летательный аппарат, приспособленный для вертикального взлета и посадки (патент EP 3702277 B1, опубл. 27.01.2021), содержащий фюзеляж и узел обеспечения тяги. Узел обеспечения тяги состоит из четырех пар винтовых двигателей и крыла с прямой стреловидностью, которое состоит из двух полукрыльев. Каждое из полукрыльев соединено в области своей законцовки с подкрылком, на котором установлены без возможности наклона два винтовых двигателя для создания подъемной тяги. Еще одна пара винтовых двигателей для создания подъемной тяги расположена в центральной области крыла вблизи его задней кромки и также без возможности наклона. Четвертая пара винтовых двигателей расположена на законцовке V-образного оперения и наклонена относительно продольной оси многовинтового летательного аппарата для создания тяги вперед.
Недостатками подобного решения являются низкая эффективность использования движителей из-за невозможности изменения их наклона и неоптимальная аэродинамика как при вертикальном движении из-за крыльев, так и при горизонтальном полете из-за движителей вертикального взлета. Кроме того, наклонное размещение четвертой пары винтовых двигателей неминуемо приводит к снижению эффективности тяги из-за нарушения параллельности векторов тяг одновременно работающих двигателей.
Известен мультикоптер с пассивно регулируемым наклонным крылом (патент US 10589838 B1, опубл. 17.03.2020), содержащий фюзеляж, фюзеляжный движитель, жестко соединенный с фюзеляжем, а также поворотное крыло и движитель, жестко соединенный c крылом. Поворотное крыло является пассивно регулируемым, угол наклона определяется скоростью горизонтального движения мультикоптера в направлении, перпендикулярном плоскости поворотного крыла. Наклон движителя, закрепленного на поворотном крыле, приводит к увеличению тяги в горизонтальном направлении и повышению скорости, а также эффективности энергозатрат.
Использование подобной схемы позволяет улучшить аэродинамику горизонтального полета, хотя малые габариты крыла не позволяют надеяться на существенное увеличение аэродинамического качества аппарата. Кроме этого, отказ от приводов для реконфигурации и переход к конвертоплану со свободным крылом, положение которого определяется горизонтальной скоростью воздушного потока в направлении, перпендикулярном плоскости поворотного крыла, упрощает конструкцию и повышает надежность аппарата Тем не менее, проблема снижения эффективности тяги из-за расхождения векторов тяги движителей в этом случае еще сильнее обостряется, вплоть до того, что приводит к снижению управляемости.
Наиболее близким к предложенному техническому решению является воздушное судно, обладающее устойчивостью при свободном полете в наклонных положениях (патент US 10633087 B2, опубл. 28.04.2020). Оно содержит планер, состоящий из двух крыльев, образующих биплан, c двумя их соединяющими пилонами, также соединенными между собой, при этом планер имеет продольную ось и поперечную ось в режиме свободного полета. Двумерно распределенная система тяги, жестко соединенная с планером, включает в себя множество двигательных установок, управляемых по скорости вращения и тяге независимо. Последнее позволяет системе управления воздушным судном сохранять устойчивость полета при любом наклоне крыльев планера относительно горизонта.
Недостатком предложенного авторами варианта является конструкция фюзеляжа, названного в патенте полезной нагрузкой и помещенного между пилонами так, что доступ к нему для обслуживания после посадки затруднен. Совмещение центра масс планера и фюзеляжа (полезной нагрузки) увеличивает маневренность аппарата, но предъявляет избыточно высокие требования к скорости компенсации возмущений из-за отсутствия элементов конструкции, обеспечивающих стабилизацию горизонтального полета, кроме крыльев. При этом любой сбой в работе системы управления или любого из движителей приводит к беспорядочному вращению аппарата и неминуемому падению.
Техническим результатом предложенного изобретения является повышение устойчивости полета в горизонтальном и наклонном положении летательного аппарата, снижение требований к системе компенсации угловых возмущений и обеспечение эксплуатационной безопасности воздушного судна.
Указанный технический результат достигается за счет того, что летательный аппарат содержит фюзеляж каплевидной формы с хвостовыми стабилизаторами, внутри которого расположены аккумуляторы, система управления аппаратом и полезная нагрузка, корпус свободного подвеса, который жестко закреплен на крыше фюзеляжа, полозья, расположенные в нижней части фюзеляжа и жестко закрепленные с ним, а также раму, состоящую из биплана из двух крыльев, мультироторной системы из четырех движителей, двух боковых и одного осевого пилона, который выполнен таким образом, что диапазон его поворота относительно фюзеляжа превышает 90°, и которая соединена с фюзеляжем посредством осевого пилона в области корпуса свободного подвеса.
Из расположения в фюзеляже аппарата аккумуляторов, системы управления аппаратом и полезной нагрузки следует, что центр тяжести конвертоплана находится существенно ниже оси подвеса рамы, что в сочетании с хвостовыми стабилизаторами позволяет сохранять горизонтальную ориентацию фюзеляжа без дополнительных энергозатрат на всех стадиях полета за счет действия гравитационных сил и встречного воздушного потока, что, в свою очередь, позволяет повысить устойчивость полета в горизонтальном и наклонном положении.
Разделение аппарата на раму и фюзеляж (вместо полезной нагрузки) с расположением центра тяжести фюзеляжа существенно ниже оси свободного вращения рамы относительно фюзеляжа позволяет минимизировать конструкцию летательного аппарата, что снижает требования к системе компенсации угловых возмущений.
Соединение более легкой рамы с утяжелённым фюзеляжем посредством осевого пилона в области корпуса свободного подвеса позволяет в случае аварийного выключения тяги автоматически под действием воздушных потоков развернуть раму в вертикальное положение крыльев, что повышает эксплуатационную безопасность аппарата.
Расположение полозьев в нижней части фюзеляжа и жесткое с ним соединение позволяет использовать режим вертолетной посадки, в том числе при возникновении нештатных ситуаций, что повышает эксплуатационную безопасность аппарата.
Ограничение диапазона поворота свободного подвеса относительно фюзеляжа позволяет обойтись без скользящих контактов для подачи электропитания из фюзеляжа на раму, что дополнительно повышает эксплуатационную безопасность аппарата.
Стоит также отметить, что аппарат не нуждается в элеронах и рулях, средствах управления векторами тяги отдельных движителей, приводах поворота осей и других исполнительных механизмах управления движением аппарата, что обеспечивает минимализм алгоритмов функционирования, независимость от скорости движения и параметров окружающей среды, что также повышает эксплуатационную безопасность аппарата.
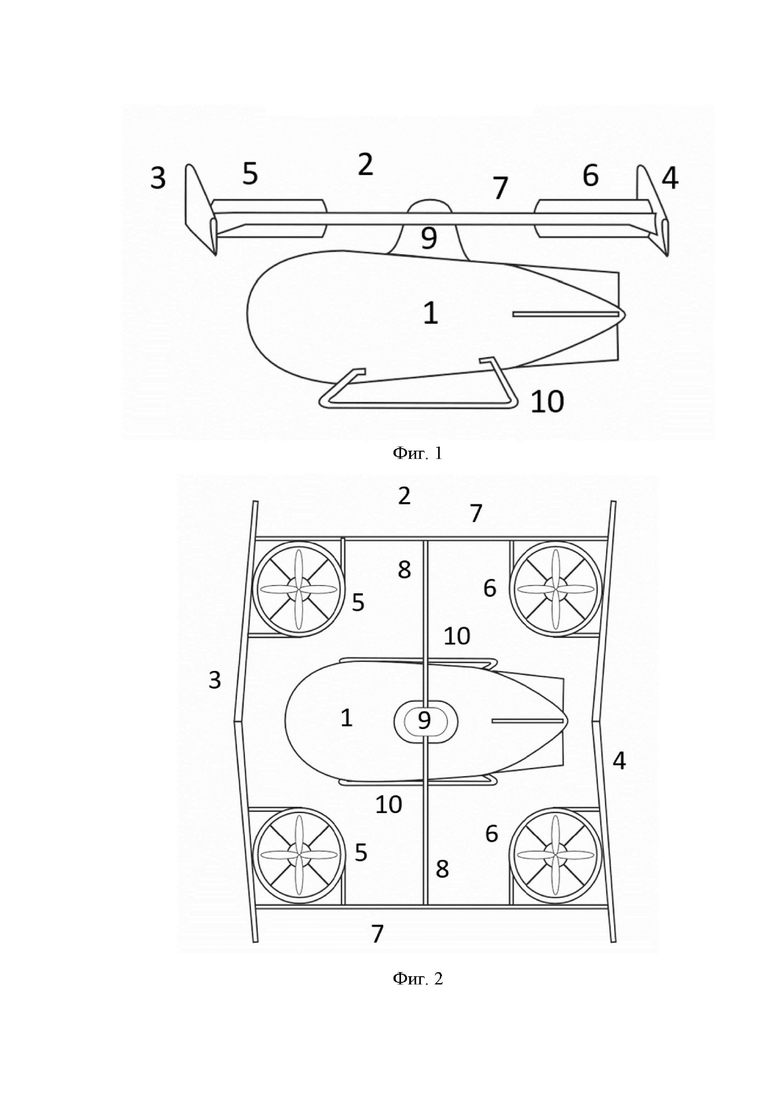
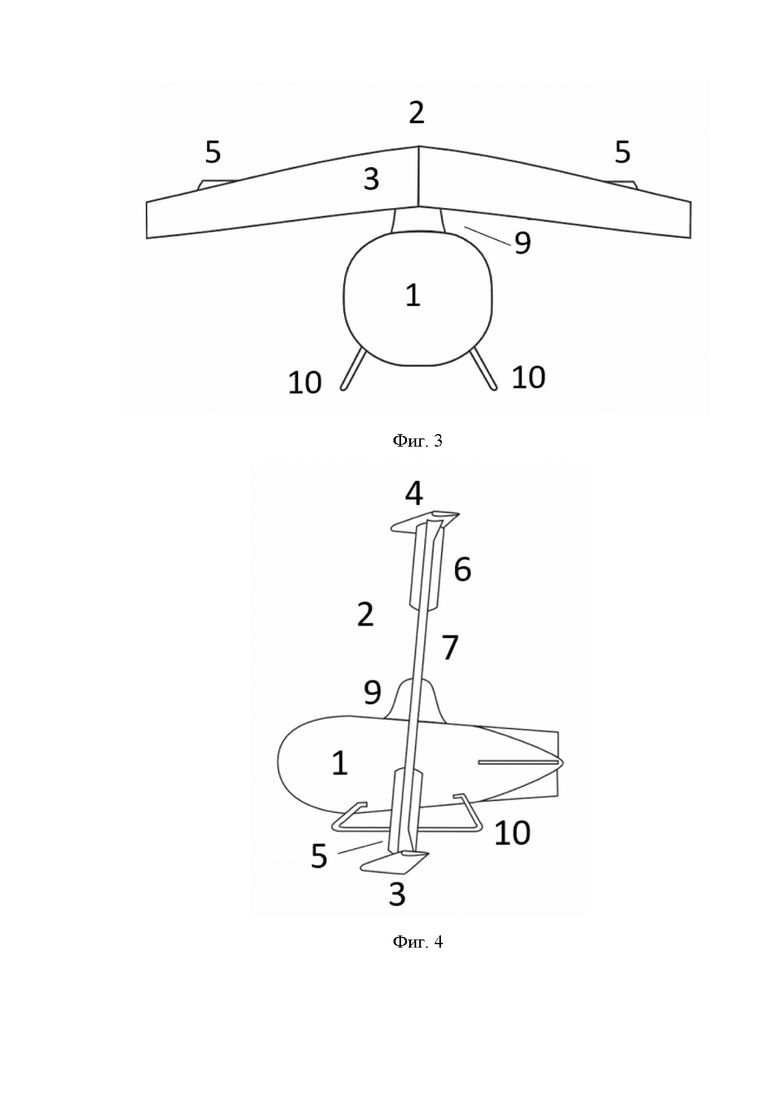
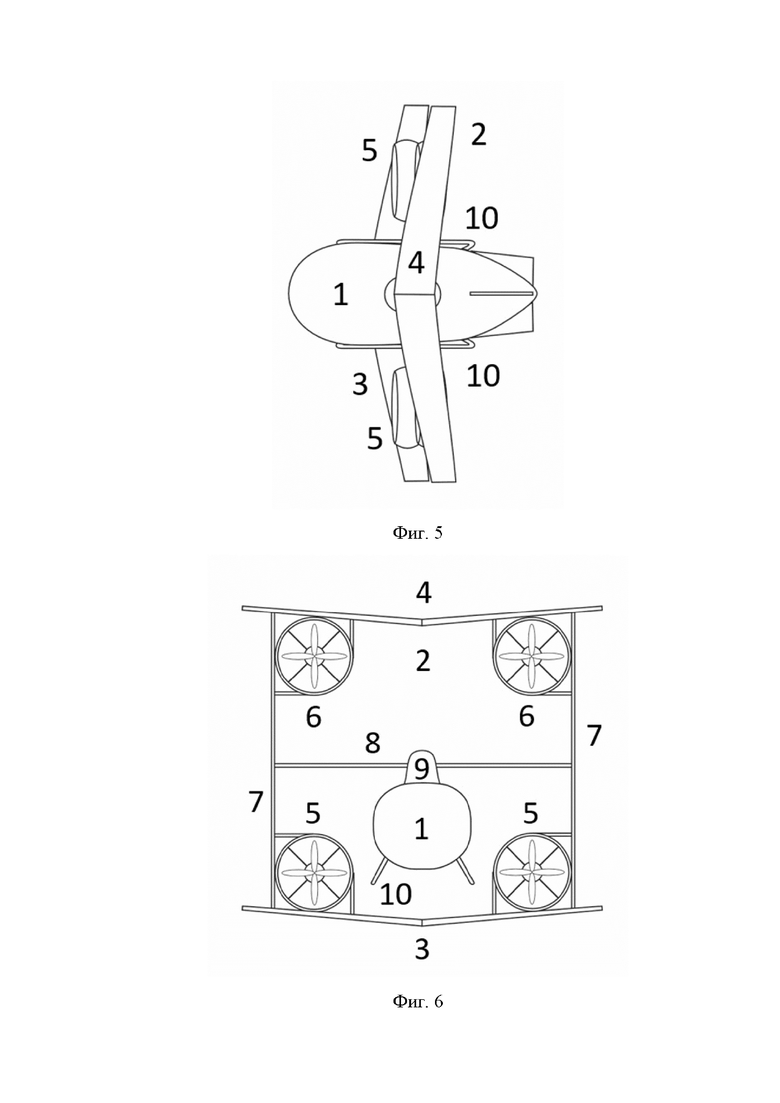
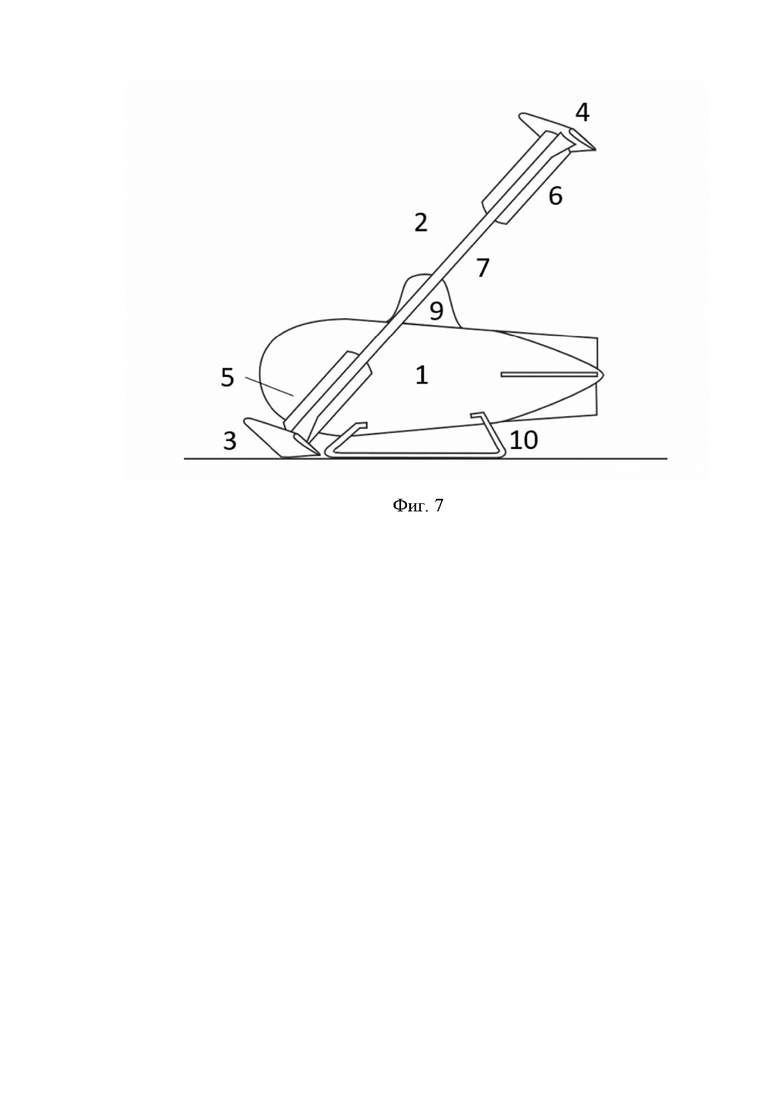
Сущность технического решения поясняется фигурами 1-7, при этом на фигурах 1-3 изображены три проекции аппарата в конфигурации вертикального взлета и посадки (на фиг. 1 - вид сбоку, на фиг. 2 - вид спереди, а на фиг. 3 - вид сверху). На фигурах 4-6 изображены три проекции аппарата в конфигурации горизонтального полета (на фиг. 4 - вид сбоку, на фиг. 5 - вид спереди, а на фиг. 6 - вид сверху). На фиг. 7 представлен аппарат в наземном состоянии.
Летательный аппарат состоит из фюзеляжа 1 каплевидной формы с хвостовыми стабилизаторами и рамы 2. Рама 2 состоит из биплана, образованного верхним задним крылом 3 и нижним передним крылом 4, соединенных боковыми пилонами 7, мультироторной системы, образованной двумя верхними задними движителями 5 и двумя нижними передними движителями 6, закрепленных на крыльях 3 и 4 и боковых пилонах 7, осевого пилона 8, соединяющего боковые пилоны 7. Осевой пилон 8 расположен в ложементе корпуса свободного подвеса 9, жестко закрепленного на крыше фюзеляжа 1 и выполненного таким образом, чтобы он обеспечивал возможность свободного вращения рамы 2 относительно фюзеляжа 1 по оси осевого пилона 8 в диапазоне углов, обеспечивающем трансформацию конфигурации аппарата из вертикальной в горизонтальную. В нижней части фюзеляжа 1 жестко закреплены полозья 10, выполненные с возможностью обеспечения устойчивого положения аппарата в наземном состоянии. Внутри фюзеляжа расположены аккумуляторы, система управления аппаратом и полезная нагрузка (на рисунках не указаны и при этом их конкретное местоположение не имеет значения).
Предложенный летательный аппарат работает следующим образом. В исходном, наземном, состоянии летательный аппарат опирается на посадочную площадку или иную поверхность (см. фиг. 7) парой полозьев 10 и передним крылом 4 или задним крылом 3 в зависимости от баланса рамы 2. После запуска движителей 5 и 6 осуществляется горизонтальное выравнивание рамы 2 на малых оборотах за счет управления разницей тяг передних 6 и задних 5 движителей. Оно производится по данным инклинометра бесплатформенной инерциальной навигационной системы (БИНС), размещенной в раме 2, отвечающего за измерение тангажа рамы 2. После горизонтального выравнивания рамы 2 равномерно увеличивается тяга движителей 5 и 6 для обеспечения отрыва от поверхности.
Вертикальный подъем на заданную высоту осуществляется в режиме квадрокоптера, когда рама 2 относительно фюзеляжа 1 находится в конфигурации вертикального взлета и посадки (см. фиг. 1-3). Компенсация угловых возмущений по тангажу и клину осуществляется изменением тяги одной пары соответствующих движителей относительно другой. Поскольку для сбалансированности моментов вращения все соседние движители вращаются в противоположные стороны, то компенсация возмущений азимутального угла производится созданием разницы тяг диагональных пар движителей.
После подъема на заданную высоту осуществляется трансформация аппарата в конфигурацию горизонтального полета (см. фиг. 4-6). Для этого в алгоритм компенсации угловых возмущений вводится корректировка на удержание не нулевой (горизонтальной) позиции инклинометра БИНС по тангажу, а заданной, с ограничением по скорости компенсации отклонений для плавности смены режима. Величина заданного угла тангажа рамы 2 вычисляется по балансу силы тяжести, действующей на аппарат, и подъемной силы крыльев 3 и 4 с учетом вертикальной проекции давления встречного воздушного потока, зависящей от угла тангажа рамы 2 и скорости полета.
После завершения трансформации аппарата в конфигурацию горизонтального полета и набора заданной скорости горизонтального движения происходит очередная корректировка алгоритма компенсации угловых возмущений. Из режима удержания заданного угла тангажа рамы 2 по показаниям инклинометра БИНС рамы 2 осуществляется переход в режим удержания заданной высоты полета при заданной скорости движения. В этом случае величина угла тангажа рамы 2 выбирается автоматически, что позволяет компенсировать возмущения плотности воздуха и изменение подъемной силы крыльев изменением тяги движителей 5 и 6.Угловые возмущения крена аппарата компенсируются созданием разности тяг диагональных пар движителей, а возмущения азимутального угла - созданием разности тяг левых и правых пар движителей.
После достижения точки назначения осуществляется трансформация аппарата в конфигурацию вертикального взлета и посадки. Для этого происходит очередная замена алгоритма компенсации угловых возмущений с отключением режима удержания высоты полета и плавным снижением заданного угла тангажа рамы до нулевого при постоянном контроле высоты и горизонтальной скорости.
В случае отказа любого из движителей аппарата, обрыва сети питания или других причин потери тяги в горизонтальном полете происходит автоматический разворот рамы 2 в режим вертикального взлета и посадки и начинается торможение спуска за счет авторотации винтов движителей. Отсутствие неупорядоченного вращательного движения аппарата позволяет за счет включения резервных батарей или движителей при их наличии не только произвести аварийную посадку, но и, восстановив управляемость, выбрать для нее подходящее место.
Таким образом, из рассмотренного следует, что заявляемое изобретение технически осуществимо и обеспечивает достижение технического результата, заключающегося в повышении устойчивости полета в горизонтальном и наклонном положении летательного аппарата, снижении требований к системе компенсации угловых возмущений и обеспечении эксплуатационной безопасности воздушного судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2017 |
|
RU2657706C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816404C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2093422C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И ЗАВИСАНИЯ САМОЛЕТА В ВОЗДУХЕ | 2016 |
|
RU2656934C2 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2507122C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
Изобретение относится к летательным аппаратам комбинированного типа, осуществляющим вертикальный взлет и посадку в мультироторном режиме и горизонтальный полет в режиме самолета с опорой на несущие поверхности крыльев биплана. Сущность изобретения заключается в том, что летательный аппарат содержит фюзеляж каплевидной формы с корпусом свободного подвеса на его крыше, полозьями для посадки и хвостовыми стабилизаторами. Внутри фюзеляжа расположены аккумуляторы, система управления аппаратом и полезная нагрузка. Свободный подвес используется для крепления к фюзеляжу рамы, состоящей из мультироторной системы, двух крыльев биплана и пилонов, выполненной таким образом, что диапазон ее поворота относительно фюзеляжа превышает 90° для обеспечения двух режимов полета и компенсации скорости воздушных потоков в мультироторном режиме. Техническим результатом является повышение устойчивости полета в горизонтальном и наклонном положении летательного аппарата, снижение требований к системе компенсации угловых возмущений и обеспечение эксплуатационной безопасности воздушного судна. 7 ил.
Летательный аппарат на базе свободного подвеса биплана с мультироторной системой, содержащий фюзеляж каплевидной формы с хвостовыми стабилизаторами, внутри которого расположены аккумуляторы, система управления аппаратом и полезная нагрузка, раму, состоящую из биплана в виде верхнего заднего крыла и нижнего переднего крыла, мультироторной системы в виде двух верхних задних движителей и двух нижних передних движителей, двух боковых пилонов, каждый из которых соединяет концы крыльев, и осевого пилона, соединяющего боковые пилоны и который выполнен с возможностью обеспечения вращения рамы относительно фюзеляжа, при этом два верхних задних движителя расположены в углах, образованных верхним задним крылом и боковыми пилонами, а два нижних передних движителя – в углах, образованных нижним передним крылом и боковыми пилонами, корпуса свободного подвеса, который расположен на крыше фюзеляжа и в ложементе которого расположен осевой пилон, и полозьев, расположенных в нижней частей фюзеляжа, при этом фюзеляж и рама выполнены таким образом, что центр тяжести фюзеляжа находится существенно ниже центра тяжести рамы.
| US 4913377 A, 03.04.1990 | |||
| US 2018002026 A1, 04.01.2018 | |||
| US 2018002011 A1, 04.01.2018 | |||
| US 2012261523 A1, 18.10.2012 | |||
| CA 3096609 A1, 23.04.2021. |

