Техническая область
Изобретение относится к области техники параллельных механизмов, в частности к полностью развязанному параллельному механизму составного привода с четырьмя степенями свободы.
Уровень техники
Структура параллельного механизма заключается в том, что несколько последовательных ответвлений соединяют динамические и статические платформы, что имеет преимущества высокой жесткости, высокой скорости и высокой точности; более того, в области обработки параллельный механизм имеет преимущества простой модульности и высокой универсальности, это один из прорывных моментов для продвижения обрабатывающей промышленности Китая к высокому уровню.
Параллельный механизм является предметом исследований в стране и за рубежом, однако из-за сильной связанности, обусловленной его структурными характеристиками, сложной структурой многошпиндельных станков, сложность разработки системы управления и проблема точности являются основными препятствиями, ограничивающими развитие параллельных механизмов в области обработки. Реализация полной развязки может решить вышеуказанные проблемы, но на данный момент существующие полностью развязанные параллельные механизмы имеют сложную конструкцию, большое количество кинематических пар в разветвленной цепи, меньшее количество степеней свободы, небольшую инженерную ценность, а большинство из них существуют только в теоретической стадии; кроме того, составной привод позволяет уменьшить количество ветвей и значительно снизить сложность механизма. Таким образом, полностью развязанный параллельный механизм составного привода, пригодный для механической обработки и производства, станет революционным достижением в обрабатывающей промышленности.
Сущность изобретения
Для того чтобы решить вышеуказанные проблемы, изобретение направлено на создание полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы.
Для достижения вышеуказанной цели, полностью развязанный параллельный механизм составного привода с четырьмя степенями свободы, предусмотренный настоящим изобретением, содержит основание, подвижную платформу, первую цепь ответвления, вторую цепь ответвления и третью цепь ответвления;
При этом основание содержит первую направляющую, вторую направляющую, третью направляющую, стойку и нижнюю пластину; первая направляющая и вторая направляющая закреплены на поверхности нижней пластины Т-образно; нижний конец стойки закреплен на поверхности нижней пластины и расположен по обе стороны от второй направляющей с первой направляющей; третья направляющая закреплена на верхней части стойки сбоку от первой направляющей и перпендикулярно нижней пластине;
Подвижная платформа содержит первую шарнирную опору, вторую шарнирную опору, третью шарнирную опору и плиту; первая шарнирная опора закреплена посередине нижней поверхности плиты; вторая шарнирная опора и третья шарнирная опора соответственно расположены посередине двух сторон плиты; ось вращения первой шарнирной опоры параллельна нижней поверхности плиты и параллельно оси вращения второй шарнирной опоры; ось вращения третьей шарнирной опоры перпендикулярна оси вращения первой шарнирной опоры и параллельна стороне плиты;
Первая цепь ответвления содержит первый ползун, первый соединительный стержень и второй соединительный стержень; первый ползун соединен с первой направляющей через первую подвижную пару; конструкция первого соединительного стержня такая же, как и у второго соединительного стержня, а оси вращения на обоих концах параллельны, один конец первого соединительного стержня соединен с верхней поверхностью первого ползуна через первую пару вращения, другой конец соединен с одним концом второго соединительного стержня через вторую пару вращения, другой конец второго соединительного стержня соединен со второй шарнирной опорой подвижной платформы через третью пару вращения; оси вращения первой пары вращения, второй пары вращения и третьей пары вращения параллельны первой направляющей;
Вторая цепь ответвления включает второй ползун, два третьих соединительных стержня, два четвертых соединительных стержня, пятый соединительный стержень и шестой соединительный стержень; второй ползун соединен со второй направляющей основания через вторую подвижную пару; один конец двух третьих соединительных стержней соответственно соединен с верхней поверхностью второго ползуна через четвертую пару вращения, а другой конец каждого третьего соединительного стержня соединен одновременно с одним концом пятого соединительного стержня и одним концом четвертого соединительного стержня через пятую пару вращения; другие концы двух четвертых соединительных стержней соответственно соединены с двумя концами шестого соединительного стержня через шестую пару вращения; кроме того, оси вращения четвертой пары вращения, пятой пары вращения и шестой пары вращения параллельны второй направляющей, а расстояние между каждой парой пар вращения одинаково, следовательно, вторая цепь ответвления в целом имеет двойную параллелограммную структуру;
третья цепь ответвления содержит третий ползун, соединительный элемент, седьмой соединительный стержень и восьмой соединительный стержень; третий ползун соединен с третьей направляющей через третью подвижную пару; один конец соединительного элемента соединен с верхней поверхностью третьего ползуна через седьмую пару вращения, другой конец соединен с одним концом седьмого соединительного стержня через восьмую пару вращения, а ось вращения седьмой пары вращения параллельно первой направляющей; оси вращения седьмой пары вращения и восьмой пары вращения перпендикулярны друг другу; один конец восьмого соединительного стержня соединен с другим концом седьмого соединительного стержня через девятую пару вращения, другой конец восьмого соединительного стержня соединен с третьей шарнирной опорой подвижной платформы через десятую пару вращения, при этом оси вращения восьмой пары вращения, девятой пары вращения и десятой пары вращения параллельны друг другу.
Основание представляет собой круглую пластинчатую конструкцию.
Подвижная платформа представляет собой квадратную пластинчатую конструкцию.
Первый соединительный стержень и второй соединительный стержень представляют собой стержнеобразные конструкции, оба конца которых находятся в состоянии изгиба, а направления изгиба на обоих концах являются противоположными.
Полностью развязанный параллельный механизм составного привода с четырьмя степенями свободы, предусмотренный настоящим изобретением, имеет следующие преимущества:
1. Каждая из четырех степеней свободы механизма полностью управляется одной кинематической парой, что реализует полную развязку и значительно упрощает теоретический анализ и разработку системы управления механизмом.
2. В цепи ответвления механизма на стойке есть две активные пары и используется составной привод, что уменьшает количество цепей ответвления, предотвращает взаимодействие между цепями ответвления, уменьшает количество деталей и дополнительно снижает стоимость производства.
3. В механизме используется двойная параллелограммная цепь ответвления, заменяющая обычную цепь ответвления с несколькими парами вращения, что повышает стабильность движения и улучшает жесткость механизма.
Описание чертежей
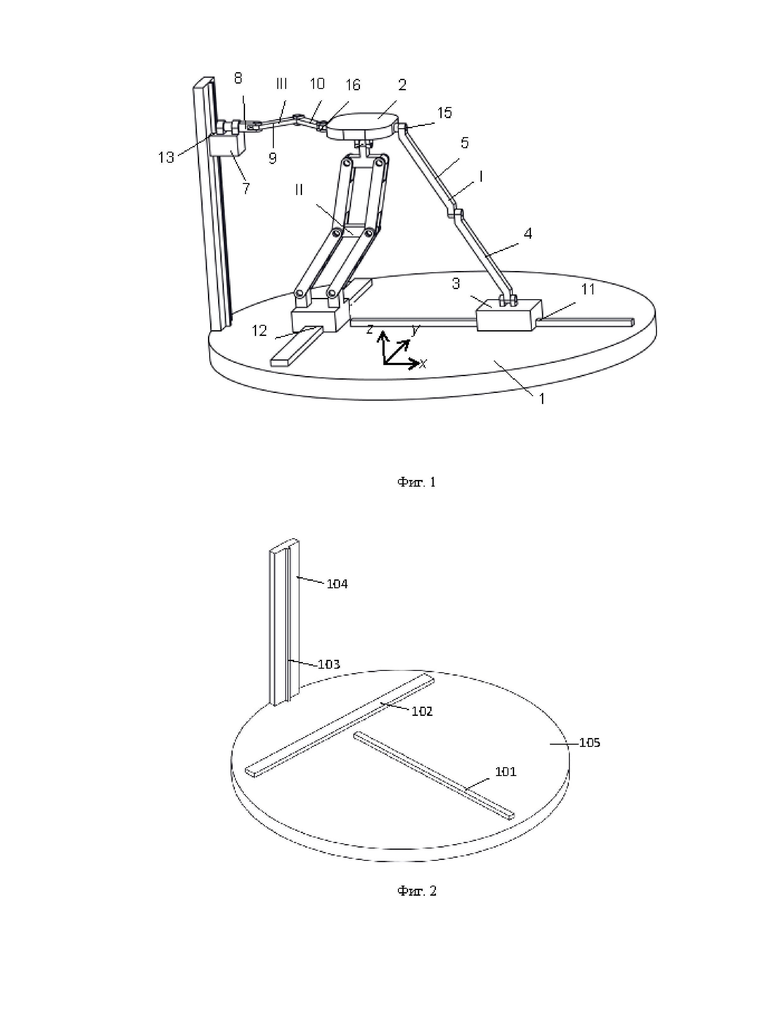
Фиг. 1 представляет собой общую структурную схему полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
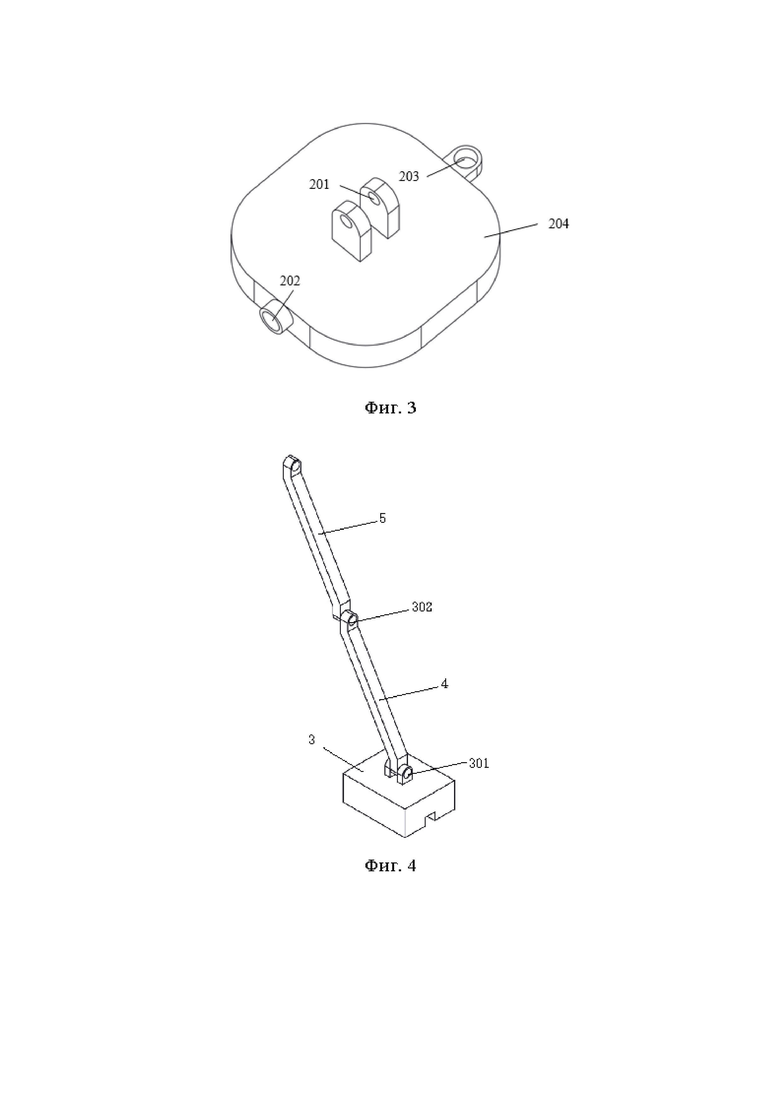
Фиг. 2 представляет собой схематическое изображение основания полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
Фиг. 3 представляет собой схематическое изображение подвижной платформы полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
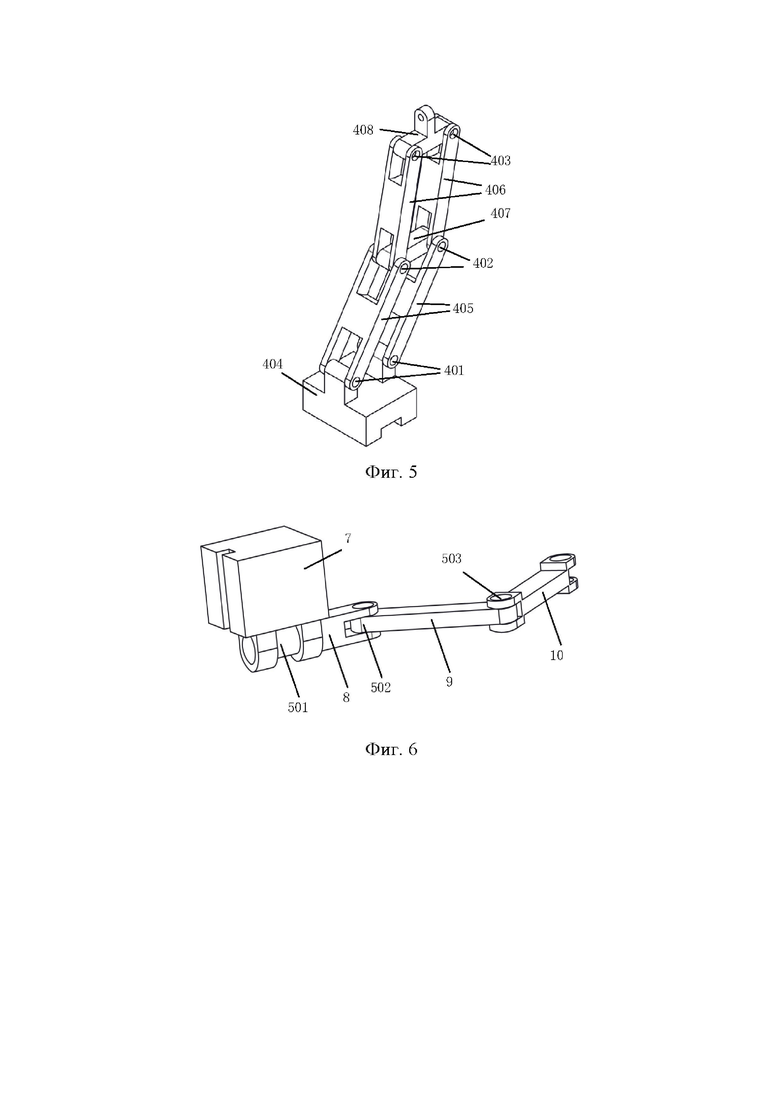
Фиг. 4 представляет собой схематическое изображение первой цепи ответвления полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
Фиг. 5 представляет собой схематическое изображение второй цепи ответвления полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
Фиг. 6 представляет собой схематическое изображение третьей цепи ответвления полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением.
Конкретные способы осуществления
Полностью развязанный параллельный механизм составного привода с четырьмя степенями свободы, предусмотренный настоящим изобретением, подробно описан ниже в сочетании с прилагаемыми чертежами.
Как показано на фиг. 1-6, полностью развязанный параллельный механизм составного привода с четырьмя степенями свободы, предусмотренный настоящим изобретением, включает в себя основание 1, подвижную платформу 2, первую цепь ответвления I, вторую цепь ответвления II и третью цепь ответвления III;
основание 1 включает в себя первую направляющую 101, вторую направляющую 102, третью направляющую 103, стойку 104 и нижнюю пластину 105; первая направляющая 101 и вторая направляющая 102 закреплены на поверхности нижней пластины 105 Т-образно; нижний конец стойки 104 закреплен на поверхности нижней пластины 105 и расположен по обе стороны от второй направляющей 102 с первой направляющей 101; третья направляющая 103 закреплена на раме 104 сбоку от первой направляющей 101 и перпендикулярно нижней пластине 105;
подвижная платформа 2 включает в себя первую шарнирную опору 201, вторую шарнирную опору 202, третью шарнирную опору 203 и плиту 204; первая шарнирная опора 201 закреплена посередине нижней поверхности плиты 204; вторая шарнирная опора 202 и третья шарнирная опора 203 соответственно расположены посередине обеих сторон плиты 204; ось вращения первой шарнирной опоры 201 параллельна нижней поверхности плиты 204 и параллельно оси вращения второй шарнирной опоры 202; ось вращения третьей шарнирной опоры 203 перпендикулярна оси вращения первой шарнирной опоры 201 и параллельна стороне плиты 204;
первая цепь ответвления I включает в себя первый ползун 3, первый соединительный стержень 4 и второй соединительный стержень 5; первый ползун 3 соединен с первой направляющей 101 через первую подвижную пару 11; конструкция первого соединительного стержня 4 такая же, как и у второго соединительного стержня 5, а оси вращения на обоих концах параллельны, при этом один конец первого соединительного стержня 4 соединен с верхней поверхностью первого ползуна 3 через первую пару вращения 301, другой конец соединен с одним концом второго соединительного стержня 5 через вторую пару вращения 302, а другой конец второго соединительного стержня 5 соединен со второй шарнирной опорой 202 подвижной платформы 2 через третью пару вращения 15; оси вращения первой пары вращения 301, второй пары вращения 302 и третьей пары вращения 15 параллельны первой направляющей 101;
вторая цепь ответвления II включает второй ползун 404, два третьих соединительных стержня 405, два четвертых соединительных стержня 406, пятый соединительный стержень 407 и шестой соединительный стержень 408; второй ползун 404 соединен со второй направляющей 102 основания 1 через вторую подвижную пару 12; один конец двух третьих соединительных стержней 405 соответственно соединен с верхней поверхностью второго ползуна 404 через четвертую пару вращения 401, а другой конец каждого третьего соединительного стержня 405 одновременно соединен с одним концом пятого соединительного стержня 407 и одним концом четвертого соединительного стержня 406 через пятую пару вращения 402; другие концы двух четвертых соединительных стержней 406 соответственно соединены с обоими концами шестого соединительного стержня 408 через шестую пару вращения 403; кроме того, оси вращения четвертой пары вращения 401, пятой пары вращения 402 и шестой пары вращения 403 параллельны второй направляющей 102, и расстояние между каждой парой пар вращения одинаково. Следовательно, вторая цепь ответвления II в целом имеет структуру двойного параллелограмма;
третья цепь ответвления III включает в себя третий ползун 7, соединительный элемент 8, седьмой соединительный стержень 9 и восьмой соединительный стержень 10; третий ползун 7 соединен с третьей направляющей 103 через третью подвижную пару 13; один конец соединительного элемента 8 соединен с верхней поверхностью третьего ползуна 7 через седьмую пару вращения 501, другой конец соединен с одним концом седьмого соединительного стержня 9 через восьмую пару вращения 502, а ось вращения седьмой пары вращения 501 параллельна первой направляющей 101; оси вращения седьмой пары вращения 501 и восьмой пары вращения 502 перпендикулярны друг другу; один конец восьмого соединительного стержня 10 соединен с другим концом седьмого соединительного стержня 9 через девятую пару вращения 503, другой конец восьмого соединительного стержня 10 соединен с третьей шарнирной опорой 203 подвижной платформы 2 через десятую пару вращения 16, а оси вращения восьмой пары вращения 502, девятой пары вращения 503 и десятой пары вращения 16 параллельны друг другу.
Основание 1 представляет собой круглую пластинчатую конструкцию.
Подвижная платформа 2 представляет собой квадратную пластинчатую конструкцию.
Первый соединительный стержень 4 и второй соединительный стержень 5 представляют собой стержнеобразные конструкции, оба конца которых находятся в состоянии изгиба, а направления изгиба на обоих концах являются противоположными.
Теперь, принимая направление первой направляющей 101 за направление оси х, направление второй направляющей 102 за направление оси у и направление третьей направляющей 103 за направление оси z, принцип работы полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренный настоящим изобретением поясняется следующим образом:
для полностью развязанного параллельного механизма составного привода с четырьмя степенями свободы, предусмотренного настоящим изобретением, выбрана первая подвижная пара 11, вторая подвижная пара 12, третья подвижная пара 13 и седьмая пара вращения 501 в качестве активных пар. Первый ползун 3 на первой цепи ответвления I перемещается по первой направляющей 101, которая может обеспечить свободу перемещения подвижной платформы 2 в направлении оси х; когда второй ползун 404 на второй цепи ответвления II перемещается по второй направляющей 102, он может обеспечить подвижной платформе 2 степень свободы в направлении оси у; когда третий ползун 7 на третьей цепи ответвления III перемещается по третьей направляющей 103, он может обеспечить подвижной платформе 2 степень свободы в направлении оси z. Когда соединительный элемент 8 на третьей цепи ответвления III вращается вместе с седьмой парой вращения 501, он может обеспечить поворот платформы 2 вокруг оси «х». Наконец, подвижная платформа 2 может реализовать в общей сложности четыре степени свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ ВЫСОКОИНТЕНСИВНОГО ФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2010 |
|
RU2549996C2 |
| СКЛАДЫВАЮЩЕЕ УСТРОЙСТВО И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2021 |
|
RU2809924C1 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| Рулевой механизм, система рулевого управления и транспортное средство | 2024 |
|
RU2834282C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| СИСТЕМА ПОДВИЖНОСТИ ТРЕНАЖЕРА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
SU1828295A1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| ЗЕНИТНАЯ УСТАНОВКА | 2005 |
|
RU2290587C1 |
| УСТРОЙСТВО НАТЯЖЕНИЯ ЦЕПИ СКРЕПЕРНОГО КОНВЕЙЕРА, ИМЕЮЩЕЕ ФУНКЦИЮ ОЧИСТКИ | 2015 |
|
RU2646212C2 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях манипуляционных систем. Параллельный механизм включает в себя основание с направляющими, подвижную платформу и три кинематические цепи, связывающие основание и подвижную платформу и шарнирно соединенные с ними. Каждая из кинематических цепей включает в себя шарнирно связанные соединительные стержни и ползуны, расположенные на направляющих основания. Соединительные стержни, направляющие и оси вращения шарниров соответствующим образом ориентированы друг относительно друга. При этом механизм имеет три поступательные и одну вращательную степени свободы, а каждая из четырех степеней свободы механизма полностью управляется одной кинематической парой, что реализует полную развязку. Использование изобретения позволяет упростить конструкцию механизма, а также повысить жесткость механизма и стабильность движения. 3 з.п. ф-лы, 6 ил.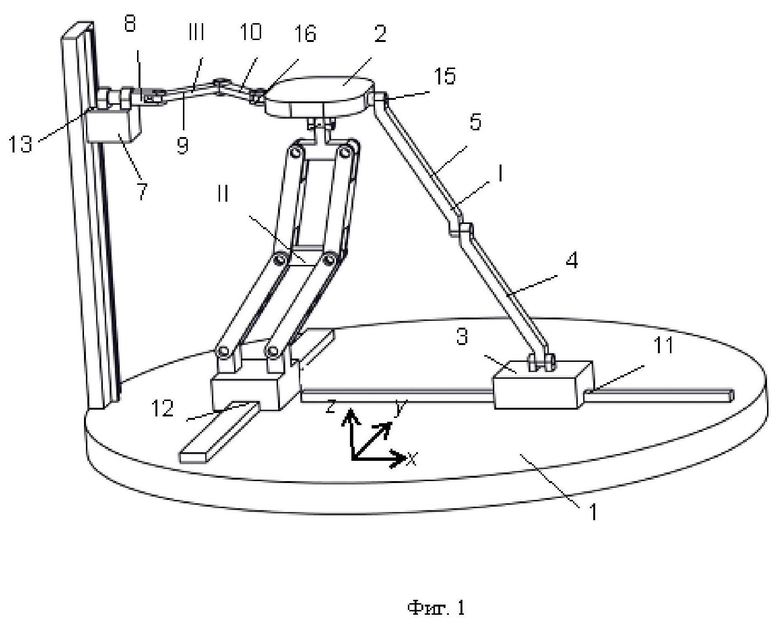
1. Параллельный механизм с четырьмя степенями свободы с полностью развязанным составным приводом, содержащий
основание (1) с расположенными на нем первой (101), второй (102) и третьей (103) направляющими,
подвижную платформу (2), которая выполнена в виде плиты (204) с расположенными на ней первой (201), второй (202) и третьей (203) шарнирными опорами, причем вторая шарнирная опора (202) и третья шарнирная опора (203) расположены посередине соответствующих сторон плиты (204), и
три кинематические цепи (I, II, III), посредством которых подвижная платформа (2) связана с основанием (1), при этом
первая (101) и вторая (102) направляющие расположены в плоскости основания (1), третья (103) направляющая расположена перпендикулярно плоскости основания (1), а каждая из упомянутых кинематических цепей (I, II, III) включает в себя шарнирно связанные соединительные стержни и соответственно первый (3), второй (404) и третий (7) ползуны, установленные соответственно на первой (101), второй (102) и третьей (103) направляющих с образованием соответственно первой (11), второй (12) и третьей (13) подвижной пары с возможностью перемещения по направляющим,
отличающийся тем, что
первая (101) направляющая и вторая (102) направляющая закреплены на поверхности основания (1) Т-образно между собой, а третья направляющая (103) закреплена на дополнительно введенной и установленной перпендикулярно основанию (1) стойке (104), нижний конец которой расположен на основании (1) с другой стороны от второй направляющей (102) по отношению к первой направляющей (101), причем третья направляющая (103) закреплена на стойке (104) со стороны, обращенной ко второй направляющей (102), при этом
первая шарнирная опора (201) плиты (204) закреплена посередине нижней поверхности плиты (204), ось вращения первой шарнирной опоры (201) расположена параллельно нижней поверхности плиты (204) и параллельно оси вращения второй шарнирной опоры (202), а ось вращения третьей шарнирной опоры (203) расположена перпендикулярно оси вращения первой шарнирной опоры (201) и параллельно соответствующей стороне плиты (204), причем
первая кинематическая цепь (I) включает в себя имеющие одинаковые конструкции первый соединительный стержень (4) и второй соединительный стержень (5), шарнирно соединенные своими концами с образованием второй вращательной пары (302), другой конец первого соединительного стержня (4) шарнирно связан с верхней поверхностью первого ползуна (3) с образованием первой вращательной пары (301), а другой конец второго соединительного стержня (5) шарнирно связан со второй шарнирной опорой (202) подвижной платформы (2) с образованием третьей вращательной пары (15), при этом оси вращения первой вращательной пары (301), второй вращательной пары (302) и третьей вращательной пары (15) расположены параллельно между собой и по отношению к первой направляющей (101), причем
вторая кинематическая цепь (II) выполнена со структурой двойного параллелограмма и включает в себя два параллельно расположенных третьих соединительных стержня (405), два параллельно расположенных четвертых соединительных стержня (406), пятый соединительный стержень (407) и шестой соединительный стержень (408), при этом одноименные концы двух третьих соединительных стержней (405) шарнирно связаны с верхней поверхностью второго ползуна (404) с образованием четвертых вращательных пар (401), а каждый из других концов третьих соединительных стержней (405) шарнирно связан с соответствующим одноименным концом двух четвертых соединительных стержней (406) с образованием пятых вращательных пар (402), причем пятый соединительный стержень (407) своими концами шарнирно связан с пятыми вращательными парами (402), а шестой соединительный стержень (408) своими концами шарнирно связан с другими концами двух четвертых соединительных стержней (406) с образованием шестых вращательных пар (403), при этом шестой соединительный стержень (408) шарнирно связан с первой шарнирной опорой (201) плиты (204) с образованием вращательной пары, оси вращения четвертой вращательной пары (401), пятой вращательной пары (402) и шестой вращательной пары (403) расположены параллельно второй направляющей (102), а расстояние между каждыми из вращательных пар одинаково, причем
третья кинематическая цепь (III) включает в себя последовательно расположенные соединительный элемент (8), седьмой соединительный стержень (9) и восьмой соединительный стержень (10), концы которых шарнирно связаны между собой с образованием соответственно восьмой вращательной пары (502) и девятой вращательной пары (503), при этом другой конец соединительного элемента (8) шарнирно связан с верхней поверхностью третьего ползуна (7) с образованием седьмой вращательной пары (501), а другой конец восьмого соединительного стержня (10) шарнирно связан с третьей шарнирной опорой (203) подвижной платформы (2) с образованием десятой вращательной пары (16), причем ось вращения седьмой вращательной пары (501) расположена параллельно первой направляющей (101), оси вращения седьмой вращательной пары (501) и восьмой вращательной пары (502) расположены перпендикулярно друг к другу, а оси вращения восьмой вращательной пары (502), девятой вращательной пары (503) и десятой вращательной пары (16) расположены параллельно между собой.
2. Параллельный механизм по п. 1, отличающийся тем, что основание (1) выполнено в виде круглой пластинчатой конструкции.
3. Параллельный механизм по п. 1, отличающийся тем, что подвижная платформа (2) выполнена в виде квадратной пластинчатой конструкции.
4. Параллельный механизм по п. 1, отличающийся тем, что первый соединительный стержень (4) и второй соединительный стержень (5) выполнены в виде стержнеобразных конструкций, оба конца которых изогнуты, причем направления изгиба на обоих концах являются противоположными.
| Способ получения неионогенных деэмульгаторов для разрушения эмульсий оксиэтилированием жирных кислот | 1959 |
|
SU132754A1 |
| ПНЕВМАТИЧЕСКОЕ СТОПОРНОЕ УСТРОЙСТВО | 0 |
|
SU174484A1 |
| СТЕНД ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ | 0 |
|
SU173465A1 |
| 0 |
|
SU191807A1 | |
| CN 102825595 A, 19.12.2012 | |||
| CN 209440144 U, 27.09.2019. | |||
