Изобретение относится к области машиностроения, в частности к шарнирным платформенным манипуляторам параллельной структуры, и может найти применение в технологических обрабатывающих центрах для обработки сферических поверхностей, сборочных автоматических линиях, устройствах для ориентации антенн и для привода видеокамер беспилотных летательных аппаратов и разных автомобилей.
Известен пространственный платформенный манипулятор параллельной структуры в виде платформы Стюарта, содержащей опоры 6-ти приводных двигателей подвижной платформы, соединенной посредством 12-ти сложных сферических шарниров с основанием при их несоосной установке между собой (книга Вульфсон И.И. и др. «Механика машин»: Учеб. Пособие для ВУЗов. - М.: Высш. Шк. 1996, стр. 28, рис. 1.20) - аналог.
Недостатками известного платформенного манипулятора является:
1) Сложность конструкции и системы управления приводом.
2) Связанная (через 12 сферических шарниров) кинематика движений платформы требует одновременной работы всех 6-ти приводных двигателей.
3) Ограниченные возможности и рабочее пространство из-за возникающих особый положений, приводящих к отказам манипулятора при работающем двигателе.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является сферический платформенный манипулятор, содержащий основание и подвижную платформу, соединенные между собой тремя параллельными кинематическими цепями с приводными и неприводными кинематическими парами, оси вращения которых выполнены непересекающимися в одной общей точке, так как в этой конструкции:
а) оси установленных на основании неприводных кинематических пар расположены параллельно между собой;
б) оси приводных и других неприводных кинематических пар выполнены совпадающими, что усложняет конструкцию привода каждой из трех параллельных кинематических цепей.
Книга (Кун С, Госселин К. Структурный синтез параллельных механизмов/ Пер. с англ. - М.: ФИЗМАТЛИТ, 2012, с. 132, рис. 7.10, а) - прототип.
Недостатками указанного сферического платформенного манипулятора, выполненного с соосно расположенными приводными и неприводными кинематическими парами, является:
1) Сложная конструкция привода всех трех приводных кинематических пар относительно неподвижного основания манипулятора при их соосной установке относительно других 9-ти неприводных вращательных пар (показанных в схеме на рис. 7.10, а)).
2) Связанная (через избыточные связи) кинематика вращательных движений платформы ограничивает области возможного применения манипулятора в технике.
3) Сложная система управления сферическим манипулятором, требующая совместной согласованной работы всех трех приводных двигателей.
4) Наличие избыточных связей в структуре многоконтурного манипулятора повышает трение и износ в его кинематических парах и снижает срок его службы (анализ структуры на рис. 7.10(а) - «Живой глаз» дан в той же книге Кун С., внизу стр. 131).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции привода и системы управления, выполнении пространственной структуры манипулятора без избыточных связей и обеспечении раздельной кинематики вращательных движений подвижной платформы, а также расширении функциональных возможностей и рабочего пространства сферического манипулятора с тремя степенями свободы.
Получение технического результата достигается за счет того, что в сферическом платформенном манипулятора, содержащем основание и подвижную платформу, соединенные между собой через три поворотные составные опоры, образующие три параллельных кинематических цепи с приводными и неприводными кинематическими парами, которые установлены несоосно между собой и выполнены с пересечением их осей в общей точке, расположенной на вертикальной линии симметрии манипулятора-трипода.
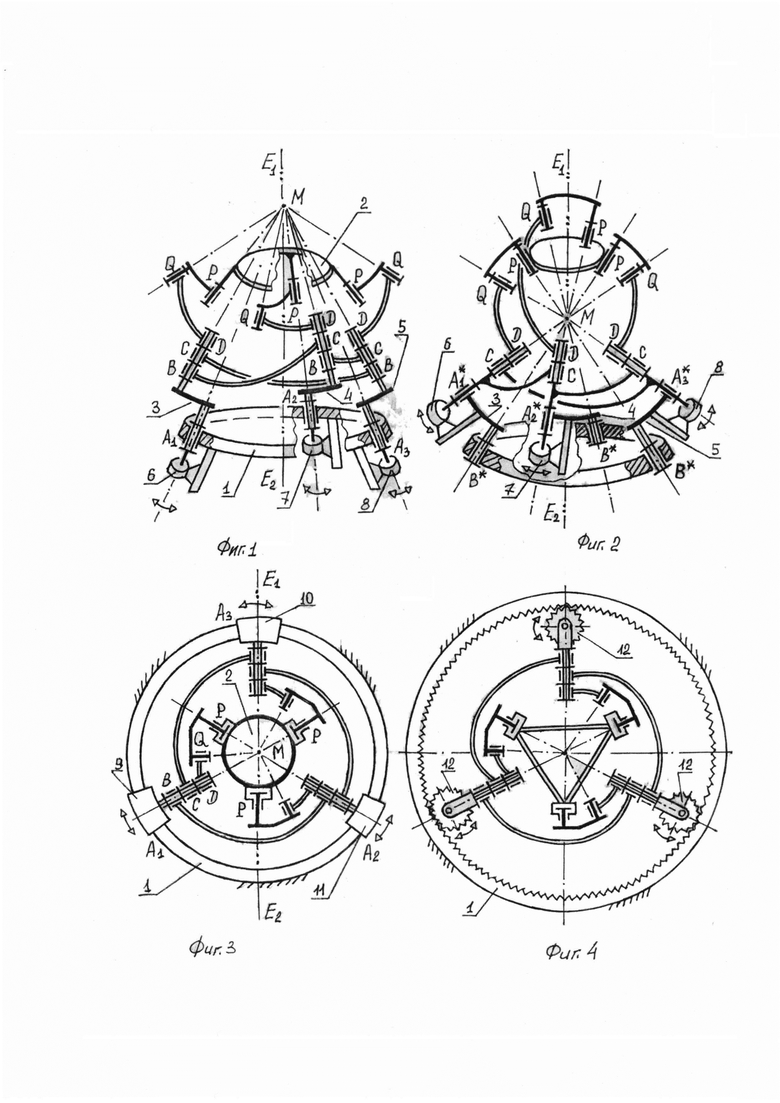
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2 и фиг. 3.
На фиг. 1 изображен общий вид сферического несоосного платформенного манипулятор-трипода, содержащего основание 1 и подвижную платформу 2, соединенные между собой через три поворотные составные опоры 3, 4 и 5 образующие три параллельных кинематических цепи с приводными вращательными кинематическими парами А1, А2, А3 и соответствующими им комплектами неприводных вращательных кинематических пар В, С, D, Q и Р. При этом приводные и неприводные кинематические пары установлены несоосно между собой и выполнены с пересечением их осей в одной общей точке М, расположенной на вертикальной линии симметрии манипулятора Е1 - Е2 и выше подвижной платформы 2.
При сборке звеньев манипулятора в замкнутые многоконтурные параллельные кинематические цепи - общая точка М пересечения всех приводных и неприводных кинематических пар располагается выше подвижной платформы 2, а три поворотные составные опоры 3, 4 и 5 выполнены в виде трех одинаковых изогнутых коленом круглых длинных осей, выполненных с возможностью установки на каждую из них трех попарно соединенных между собой не/приводных вращательных кинематических пар B, С и D. При этом подвижное соединение неприводных кинематических других пар между поворотными опорами 3, 4 и 5 и подвижной платформой 2 выполнено в виде расположенных по окружности этой платформы трех сдвоенных одноподвижных вращательных кинематических пар с пересекающимися осями вращения, точка пересечения которых совпадает с общей точкой М пересечения всех приводных (А1, А2, А3) и не/приводных (B, С, D, Q и Р) вращательных кинематических пар манипулятора.
Приводные кинематические пары выполнены в виде одноподвижных вращательных пар, установленных на основании 1 равномерно по окружности под одинаковым углом наклона к основанию и выполненных с пересечением их осей вращения в одной точке, которая совмещена с точкой М пересечения всех не/приводных кинематических пар В, С, D, Q и Р, расположенных как на трех поворотных составных опорах 3, 4 и 5, так и на подвижной платформе 2 по ее окружности.
Приводные вращательные кинематические пары А1,А2,А3 соединены с отдельными вращательными приводными двигателями 6, 7, 8, которые установлены стационарно на неподвижном основании 1 для образования сферического манипулятора с тремя управляемыми степенями свободы без избыточных связей подвижной платформы 2 при ее угловом повороте вокруг трех координатных осей.
На фиг. 2 представлен вариант выполнения сферического несоосного платформенного манипулятора-трипода, в котором отдельные вращательные приводные двигатели 6, 7 и 8 закреплены на подвижных поворотных составных опорах 3, 4 и 5 для привода одной из установленных на них вращательных кинематических пар, например, пары В. В этом случае все три пары В* на поворотных опорах 3, 4 и 5 становятся приводными, а все кинематические пары  - становятся неприводными. Общая точка М пересечения осей всех кинематических пар несоосного сферического манипулятора расположена между платформой и основанием.
- становятся неприводными. Общая точка М пересечения осей всех кинематических пар несоосного сферического манипулятора расположена между платформой и основанием.
На фиг. 3 представлен вариант выполнения сферического несоосного платформенного манипулятора-трипода, в котором основание 1 выполнено в виде круговой направляющей, расположенной соосно с вертикальной линией симметрии Е1 - Е2 манипулятора-трипода. При этом приводные кинематические пары А1, А2 и A3 выполнены в виде одноподвижных вращательных пар, образованных радиально-изогнутыми криволинейными приводными ползунами 9, 10 и 11 с круговой направляющей основания 1, а общая вертикальная ось указанных приводных кинематических пар совмещена с общей точкой М пересечения всех неприводных вращательных кинематических пар В, С, D, Q и Р.
Оси всех трех закрепленных на платформе 2 неприводных кинематических пар «Р» установлены в плоскости круглой платформы по ее радиусу для расположения общей точки М их пересечения в плоскости платформы 2.
Каждый из ползунов 9, 10 и 11 выполнен с отдельным приводом от гидро- или пневмоцилиндров, равномерно установленных по окружности круговой направляющей.
На фиг. 4 представлен вариант выполнения сферического манипулятора, в котором круговая направляющая основания 1 выполнена в виде неподвижного зубчатого колеса с внутренними или наружными зубьями, в зацеплении с которыми равномерно по окружности установлено три приводных сателлита 12, ось каждого из которых закреплена на отдельной поворотной составной опоре манипулятора.
Работа представленного сферического несоосного платформенного манипулятора-трипода заключается в следующем.
Раздельный привод каждого из трех вращательных двигателей, соединенных с отдельными поворотными составными опорами приводит к их угловому повороту, который через неприводные вращательные кинематические пары обеспечивает требуемый угловой поворот подвижной платформы с рабочим органом вокруг каждой из трех координатных осей х, у, z и движение рабочего органа по сферической поверхности.
Работоспособность и полное отсутствие вредных избыточных связей в предлагаемой структуре несоосного сферического манипулятора-трипода можно установить по известной классической формуле подвижности W (П.Л. Чебышева, представленной в книге: Вульфсона И.И. и др. «Механика машин. Учебное пособие для ВТУЗОВ.» - М.: Высш. Шк. 1996, стр. 17, формула (1.6)):

где n - общее число звеньев механизма манипулятора (включая неподвижное основание), р1 - число одноподвижных кинематических пар, W - число управляемых степеней свободы выходного звена.
Структурная схема предлагаемого сферического манипулятора содержит n=14 и р1=18 (так как его сборка состоит из 12-ти двухшарнирных звеньев, платформы и основания) после подстановки которых в формулу Чебышева получаем следующий результат:

доказывающий, что данный несоосный сферический манипулятор:
а) имеет 3 управляемых степени свободы платформы и является работоспособным;
б) во всех замкнутых контурах всех трех параллельных цепей отсутствуют вредные избыточные связи, снижающие срок службы манипулятора.
Достигаемый технический эффект заключается в следующем:
1) Упрощение конструкции и системы управления привода без вредных избыточных связей.
2) Обеспечение раздельной кинематики вращательных движений.
3) Расширение функциональных возможностей и рабочего пространства сферического манипулятора с тремя управляемыми степенями свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
Изобретение относится к области машиностроения, в частности к шарнирным платформенным манипуляторам параллельной структуры, и может найти применение в технологических обрабатывающих центрах для обработки сферических поверхностей, сборочных автоматических линиях, устройствах для ориентации антенн и для привода видеокамер беспилотных летательных аппаратов и автомобилей. Сферический платформенный манипулятор-трипод содержит основание и подвижную платформу, соединенные между собой через три поворотные составные опоры, образующие три параллельных кинематических цепи с приводными и неприводными вращательными кинематическими парами. При этом приводные и неприводные вращательные кинематические пары в кинематической цепи установлены несоосно между собой и выполнены с пересечением их осей в одной общей точке, расположенной на вертикальной линии симметрии манипулятора-трипода. Обеспечивается упрощение конструкции и системы управления привода без избыточных связей, обеспечение раздельной кинематики вращательных движений, а также расширение функциональных возможностей и рабочего пространства манипулятора. 9 з.п. ф-лы, 4 ил.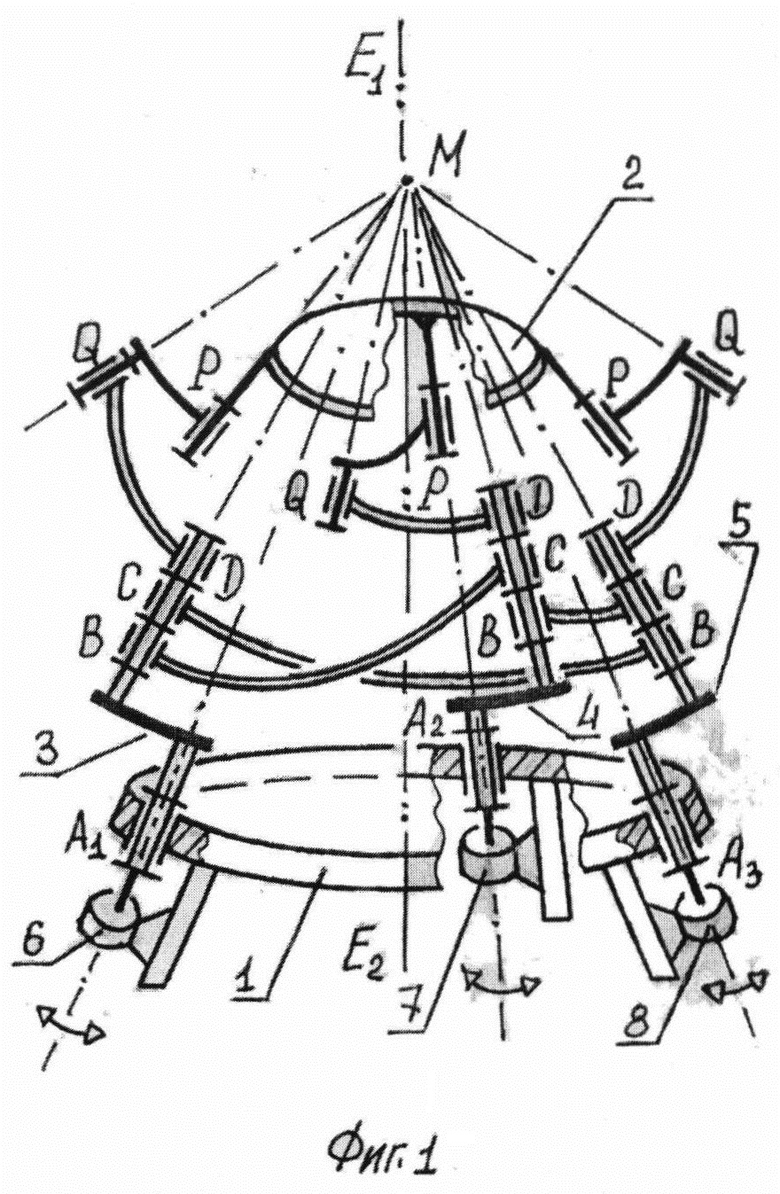
1. Сферический платформенный манипулятор-трипод, содержащий основание и подвижную платформу, соединенные между собой через три поворотные составные опоры, образующие три параллельных кинематических цепи с приводными и неприводными вращательными кинематическими парами, отличающийся тем, что приводные и неприводные вращательные кинематические пары в кинематической цепи установлены несоосно между собой и выполнены с пересечением их осей в одной общей точке, расположенной на вертикальной линии симметрии манипулятора-трипода.
2. Манипулятор-трипод по п. 1, отличающийся тем, что подвижная платформа и основание соединены между собой посредством трех поворотных составных опор в виде трех одинаковых изогнутых коленом осей, выполненных с возможностью установки на каждую из них трех попарно соединенных между собой неприводных вращательных кинематических пар.
3. Манипулятор-трипод по п. 1, отличающийся тем, что подвижное соединение неприводных кинематических пар между поворотными опорами и подвижной платформой выполнено в виде расположенных по окружности упомянутой платформы трех сдвоенных одноподвижных вращательных кинематических пар с пересекающимися осями вращения, точка пересечения которых совпадает с общей точкой пересечения осей вращения всех приводных и неприводных вращательных кинематических пар манипулятора.
4. Манипулятор-трипод по п. 1, отличающийся тем, что приводные кинематические пары выполнены в виде одноподвижных вращательных пар, установленных на основании равномерно по окружности под одинаковым углом наклона к основанию и выполненных с пересечением их осей вращения в одной точке, которая совмещена с точкой пересечения всех неприводных кинематических пар, расположенных на трех поворотных составных опорах и на подвижной платформе по ее окружности.
5. Манипулятор-трипод по п. 1, отличающийся тем, что основание выполнено в виде круговой направляющей, расположенной соосно с вертикальной линией симметрии манипулятора-трипода, приводные кинематические пары выполнены в виде одноподвижных вращательных пар, образованных радиально-изогнутыми криволинейными приводными ползунами с круговой направляющей основания, а общая вертикальная ось приводных кинематических пар совмещена с общей точкой пересечения всех неприводных вращательных кинематических пар, расположенных на подвижной платформе и на трех поворотных составных опорах.
6. Манипулятор-трипод по п. 5, отличающийся тем, что каждый из установленных на круговой направляющей основания радиально-изогнутых ползунов выполнен с отдельным приводом от гидро- или пневмоцилиндров, равномерно установленных по окружности круговой направляющей.
7. Манипулятор-трипод по п. 1, отличающийся тем, что приводные вращательные кинематические пары соединены с отдельными вращательными приводными двигателями для образования сферического манипулятора с тремя управляемыми степенями свободы без избыточных связей подвижной платформы при ее угловом повороте вокруг трех координатных осей.
8. Манипулятор-трипод по п. 1, отличающийся тем, что общая точка пересечения осей вращения всех приводных и неприводных кинематических пар расположена на вертикальной линии симметрии манипулятора и при его сборке располагается, например, выше подвижной платформы, или между подвижной платформой и основанием, или в плоскости подвижной платформы посредством установки осей неприводных кинематических пар на круглую платформу, расположенных по ее радиусу.
9. Манипулятор-трипод по п. 5, отличающийся тем, что круговая направляющая основания выполнена в виде неподвижного зубчатого колеса с внутренними или наружными зубьями, в зацеплении с которыми равномерно по окружности на поворотных составных опорах установлено три приводных сателлита.
10. Манипулятор-трипод по п. 7, отличающийся тем, что отдельные вращательные приводные двигатели установлены стационарно на неподвижном основании манипулятора или закреплены на подвижных поворотных составных опорах для привода одной из установленных на них вращательных кинематических пар.
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Замедляющая система в виде замкнутого в кольцо диафрагмированного волновода для синхротронов | 1960 |
|
SU146894A1 |
| US 4878393 A1, 07.11.1989 | |||
| Mianovski К | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

