Изобретение относится к тренажеростроению и может быть использовано в системе подвижности тренажера транспортного средства при воспроизведении на нем акселерационных эффектов путем перемещения подвижной платформы в пространстве по 3-м степеням свободы.
Целью изобретения является повышение точности воспроизведения подвижной платформой перемещений по трем cтепеням свободы и повышения качества передачи акселерационной информации.
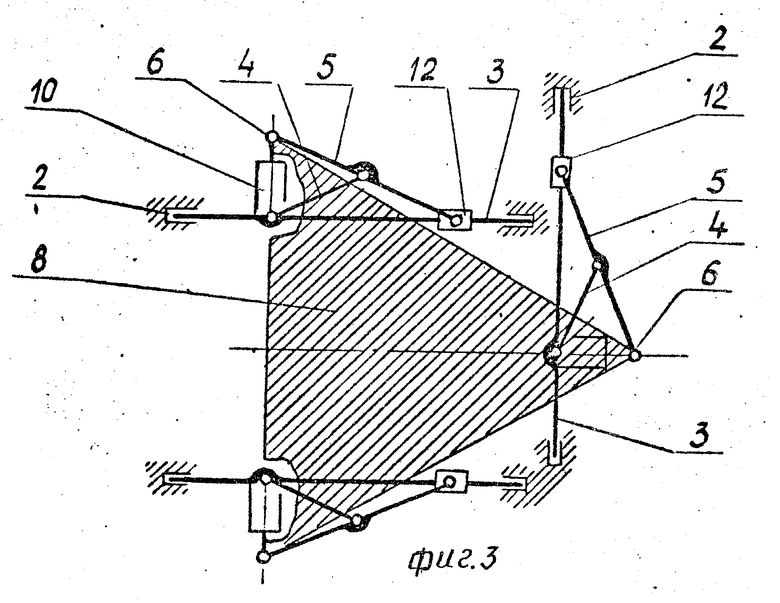
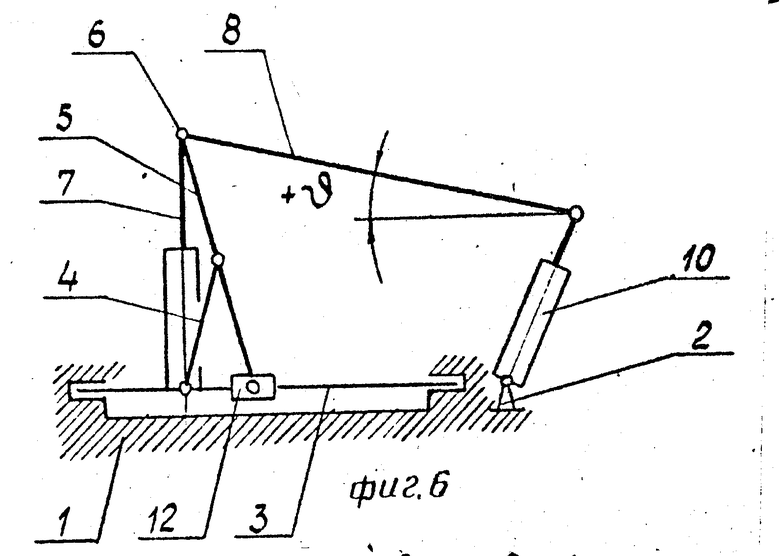
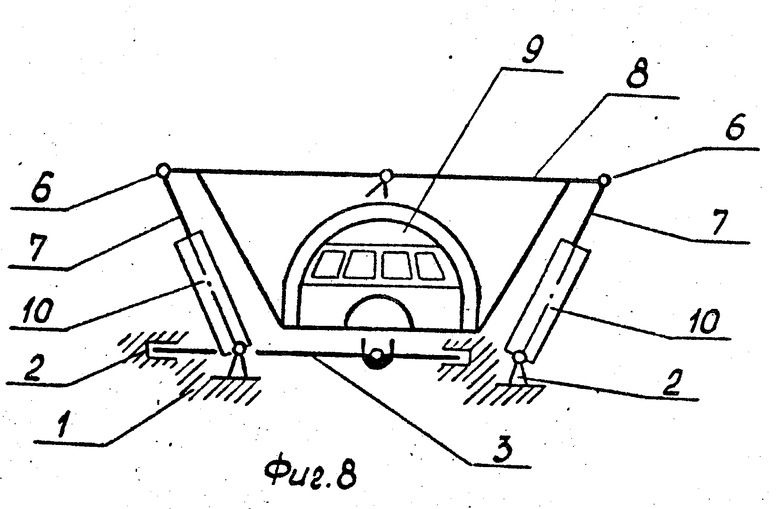
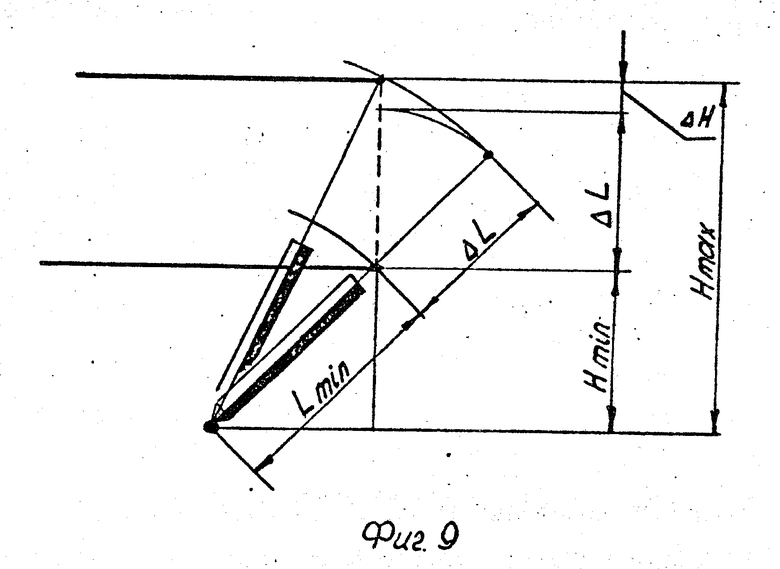
На фиг.1 представлен общий вид систем подвижности с 3-мя степенями свободы; на фиг.2 то же, вид сбоку; на фиг.3 то же, вид сверху; на фиг.4 - перемещение подвижной платформы по вертикали; на фиг.5 и 6 перемещение подвижной платформы по тангажу; на фиг.7 перемещение подвижной платформы по крену; на фиг.8 и 9 установка кабины транспортного средства в пространстве между механизмами.
Система подвижности тренажера транспортного средства содержит неподвижное основание 1, в опорах 2 расположены направляющие 3, на которых установлены входящие составной частью заявленного устройства кривошипно-ползунные механизмы, состоящие из кривошипа 4 и рычага 5, верхний конец 6 каждого рычага 5 шарнирно соединен со штоком 7 и подвижной платформой 8, на которую устанавливается кабина 9 транспортного средства, причем верхний конец 6 рычага 5 соединен с осью вращения кривошипа с помощью линейного двигателя, например, гидроцилиндра, корпус 10 которого установлен на направляющей 3 и расположен таким образом, что ось перемещения штока 7 проходит через ось вращения кривошипа 4. На направляющей 3 установлен соединенный с нижним концом 11 рычага 5 ползун 12, входящий в состав кривошипно-ползунного механизма. В исходном положении механизмы с рычагом 5, кривошипом 4, гидроцилиндром 10 имеют наклон к общему основанию 1, причем две направляющие 3 параллельны между собой, а третья перпендикулярна и равноудалена от них. Направляющие 3 выполнены с возможностью поворота вокруг своей продольной оси.
Верхняя подвижная платформа 8 выполнена в виде пространственной фермы, состоящей из каркаса 13, площадки 14 для установки кабины 9, соединенных между собой стержнями 15. К нижней плоскости каркаса 13 крепятся кронштейны 16, к которым присоединяются ушки 17 штока 7 гидроцилиндра 10.
Кривошип 4 представляет собой Н-образную раму, нижний конец которой охватывает одновременно корпус 10 гидроцилиндра и направляющую 3. Верхний конец рамы (кривошипа 4) охватывает рычаг 5 и соединен с ним осью 18.
Система подвижности тренажера транспортного средства работает следующим образом.
При подаче гидравлического давления от источника гидропитания (на рисунках не показан) в нижнюю полость гидроцилиндра 10 шток 7 вместе с верхним концом 6 рычага 5 перемещается, при этом кривошип 4 поворачивается, а нижний конец 11 рычага 5 перемещается вместе с ползуном 12 по направляющей 3 к корпусу 10 гидроцилиндра.
При одновременном выдвижении всех штоков 7, подвижная платформа 8 перемещается вертикально, механизмы с гидроцилиндрами и направляющей 3 при этом поворачиваются в опорах 2 изменяя угол наклона механизмов к основанию 1. Выдвигаясь и убираясь штоки 7, в зависимости от направления подачи гидравлической жидкости, осуществляют перемещение подвижной платформы 8 по вертикали по оси Y.
При перемещении по вертикали подвижная платформа движется без каких либо смещений в продольном или поперечном направлениях. Устойчивость подвижной платформе придают кривошипно-ползунные механизмы. Одновременно с выдвижением штока 7 происходит поворот исполнительного механизма, состоящего из гидроцилиндра 10, кривошипа 4, рычага 5 и поворотной направляющей 3. Величина перемещения подвижной платформы 8 по вертикали будет больше величины рабочего хода штока 7 за счет увеличения угла наклона всего механизма при выдвижении штока 7 гидроцилиндра 10.
При выдвижении штоков 7 двух параллельных механизмов и опущенном штоке 7 третьего механизма, перпендикулярного первым двум, а также при обратном чередовании выдвижения штоков 7, т.е. при убранных штоках двух параллельных механизмов и выдвинутом штоке третьего механизма, происходит движение подвижной платформы 8 по тангажу. При этом не происходит никакого дополнительного смещения платформы 8 ни продольного, ни поперечного, осуществляется только "чистое" движение по тангажу. При крене шток 7 гидроцилиндра одного из параллельных механизмов выдвигается, а шток 7 другого параллельного механизма убирается, шток 7 гидроцилиндра механизма, расположенного перпендикулярно к первым двум, находится в среднем положении. Смещения продольной оси подвижной платформы 8 не происходит ни в сторону, ни по вертикали.
Имеющийся в исходном состоянии наклон механизмов к основанию и расположение кабины 9 ниже плоскости верхних шарниров, когда кабина оказывается как бы подвешенной к верхним шарнирам, придает всей системе подвижности устойчивость.
Техническая реализация заявленного устройства может быть выполнена следующим образом. В качестве линейного двигателя могут быть использованы следящие гидроприводы 636.10.523, состоящие из гидроцилиндра ПГМ (ТУ 74999.274.00.000 ТУ) и потенциометра 672.40.870. или следящий гидропривод 722.90.554. состоящий из гидроцилиндра ТС.1500 (ТУ ТС.1500-ОТУ) и узла обратной связи 672.30.775. Опорами для вращающейся направляющей могут служить шарнирные подшипники ШН-55Ю (Технические условия ЕТУ 100), установленные в стальных (поковка из стали 45 ГОСТ 1050-74 или отливка из стали 45Л ГОСТ 977-75) корпусах, закрепленных неподвижно на фундаменте (бетонной плите). Вращающаяся направляющая может быть выполнена по образцу направляющей 821.90.598. (материал-сталь 25Х13Н2 ТУ 14-1-721-73), а ползуном на этой направляющей может быть использована подвижная каретка 821.30.511 все детали из состава стенда подвижного 415.40.516.
Рычаг может быть выполнен из стальной ( сталь 30ХГСА ГОСТ 4543-71) полосы прямоугольного сечения, кривошип из профиля коробчатого сечения, типа швеллера, из стали 30ХГСА ГОСТ 4543-71. Шарнирные сочленения рычагов и кривошипов могут быть выполнены на шарнирных подшипниках ШН-40Ю (ЕТУ 100), а в качестве опоры, устанавливаемой на подвижной платформе для присоединения рычага и штока гидроцилиндра, может быть использована опора верхняя 711.11.715. представляющая собой трехстепенной шарнир. Верхняя подвижная платформа может быть выполнена в виде пространственной фермы, сваренной из стального профильного проката (уголок, швеллер, двутавр).
Заявленное устройство позволяет воспроизводить движения подвижной платформы по трем степеням свободы с большой точностью.
Под точностью перемещения понимается воспроизведение задаваемых перемещений без искажения, без других, зависимых от основного перемещения, например, если подвижная платформа отрабатывает вертикальное перемещение, то не должно быть продольных (и других) перемещений: если тангаж не должно быть вертикальных (и других) перемещений: если крен не должно быть боковых (и других) перемещений и т.п. Повышение точности перемещения происходит за счет исключения посторонних, сопутствующих основному, заданному перемещению подвижной платформы. Одновременное перемещение подвижной платформы по двум или трем степеням свободы должно являться только результатом воздействия управляющих сигналов, задаваемых оператором.
Под качеством передачи акселерационной информации понимается, что создаваемые системой подвижности скорости и ускорения и воспринимаемые обучающимся экипажем приближаются к акселерационной информации, получаемой экипажем на реальном объекте. Качество передачи акселерационной информации является следствием точности перемещения подвижной платформы. Этот эффект обеспечивается таким расположением исполнительных механизмов, при котором два из них расположены на двух параллельных направляющих, а третий на направляющей, перпендикулярной первым двум, т. е. таком расположении направляющих, при котором при работе устройства не создается дополнительных, зависимых от основного перемещений.
Кроме того появляется возможность устанавливать кабину в пространстве между механизмами ниже уровня верхних шарниров гидроцилиндров, что придает большую устойчивость, уменьшает высоту всего устройства, создает условия для проведения монтажа и регламентных работ без вспомогательных механизмов. Нижнее расположение кабины позволяет использовать систему подвижности в качестве аттракционов из-за низко расположенного входа в нее, небольшой высоты устройства, размещающегося в помещении с низким расположением перекрытий (потолков). ЫЫЫ2 ЫЫЫ4 ЫЫЫ6 ЫЫЫ8
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 1995 |
|
RU2092772C1 |
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| Авиационный симулятор (авиасимулятор) самолета Boeing 737 | 2018 |
|
RU2688500C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР | 2009 |
|
RU2398284C1 |
| Тренажёр транспортного средства | 2023 |
|
RU2803921C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |




Изобретение относится к тренажеростроению и может быть использовано в системе подвижности тренажера транспортного средства при воспроизведении на нем акселерационных эффектов путем перемещения подвижной платформы в пространстве по 3-м степеням свободы. Целью изобретения является повышение точности воспроизведения подвижной платформой перемещений по 3-м степеням свободы и повышения качества передачи акселерационной информации обучающемуся экипажу. Это достигается тем, что в систему подвижности тренажера транспортного средства, содержащую неподвижное основание 1 с опорами 2, три гидроцилиндра, штоками шарнирно соединенных с подвижной платформой 8 с кабиной оператора, введены три направляющие 3, механически соединенные на концах с опорами, направляющие выполнены с возможностью поворота вокруг своей продольной оси и размещены на основании так, что две направляющие параллельны между собой, а третья перпендикулярна и равноудалена по отношению к первым двум, причем основания корпусов гидроцилиндров установлены на направляющих, три кривошипно-ползунных механизма, концы рычагов которых соответственно соединены шарнирно с ползунами и штоками 7 гидроцилиндров, концы кривошипов 4 соответственно соединены шарнирно с основанием корпусов гидроцилиндров и средней частью рычагов, причем ось перемещения штока проходит через ось вращения кривошипа, а длины кривошипов и плеч рычагов равны между собой. 9 ил.
Система подвижности тренажера транспортного средства, содержащая неподвижное основание с опорами, гидроцилиндры, штоками шарнирно соединенные с подвижной платформой и с установленной кабиной оператора, отличающаяся тем, что, с целью повышения точности воспроизведения подвижной платформой перемещений по трем степеням свободы и повышения качества передачи акселерационной информации, введены размещенные на основании три направляющие, механически соединенные на концах с опорами и выполненные с возможностью поворота вокруг своей продольной оси, и три кривошипно-ползунных механизма, концы рычагов которых соответственно соединены шарнирно с ползунами и штоками гидроцилиндров, концы кривошипов соответственно соединены шарнирно с основанием корпуса гидроцилиндров и средней частью рычагов, при этом две направляющие параллельны между собой, а третья перпендикулярна и равноудалена по отношению к первым двум, при этом основания корпусов гидроцилиндров установлены на направляющих, ось перемещения штока проходит через ось вращения кривошипа, а длины кривошипов и плеч рычагов равны между собой.
| Компенсационный индукционный датчик скорости | 1961 |
|
SU146100A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Патент США 4207687, кл | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
