Изобретение относится к радиотехнике, точнее к радиолокации, и может быть использовано для обнаружения беспилотных летательных аппаратов (БПЛА), оборудованных радиоканалом связи и/или радиорелейным каналом с наземной станцией управления и наведения.
Общей проблемой обнаружения БПЛА (для последующего уничтожения) является следующее:
- в основном, их малые размеры, следовательно, малая радиолокационная заметность, к тому же их корпус делается из композиционных материалов, пластика и пр.;
- обнаружение по радиоканалу явно недостаточно, т.к. по нему невозможно определить параметры полета: высота, углы азимута и места, а также дальность до него, к тому же радиоканал работает в импульсном режиме, т.е. быстрая передача в микросекундах и длительная пауза между передачами, а также изменение частот приема /передачи три примера.
В сентябре 2019 г. на территории Саудовской Арабии 10 ударных дронов-камикадзе йеменских партизан (кстати, кустарного производства) уничтожили самый большой нефтеперегонный завод, на охране которого стоял ЗРК «Пэтриот» (США), который на только не произвел ни одного пуска, но даже не обнаружил их.
На российскую базу ВВС в Сирии регулярно нападают дроны-камикадзе ЭГИЛ, как одиночные, так и в составе «волчьей стаи», которые успешно сбивают ЗРК «Панцирь-М», обнаруживая их РЛС в миллиметровом диапазоне, но эти дроны имеют достаточную радиолокационную заметность.
Эффективность действия таких РЛС против очень небольших дронов, размеров с ладонь человека, несущих небольшой заряд тротила весом до 100-200 г далеко не единичная. Но даже в таких малогабаритных дронах и сделанных полностью композитов, пластика и пр. есть электронные узлы, содержащие р-n (n-р) переходы в ИМС или других частях схем управления и/или наведения, которые и можно использовать для обнаружения дрона, даже если эти переходы находятся как в активном, так и в пассивном состоянии.
Так в армяно-азербайджанском конфликте (Нагорный Карабах) осень 2020 г. азербайджанской стороной широко применялись БПЛА различного назначения: разведывательные, барражирующие и ударные поставляемые Израилем и Турцией. Эти БПЛА безнаказанно хозяйничало в небе и разбомбили всю тяжелую технику, т.к. с армянской стороны не было никаких средств обнаружения, не считая самого архаичного - зрительного.
Обычные разведочные и боевые БПЛА большой массы и габаритов легко обнаруживаются современными РЛС, входящих в состав зенитно-ракетных комплексов. Другое дело обнаружить малогабаритные дроны с минимальным весом и габаритом и сделанные из композитных и разнопрозрачных материалов, к тому же летящие почти на уровне земли. Обнаружение их - архисложная техническая задача.
В настоящее время существуют системы и способы обнаружения винтокрылых БПЛА, основанные на радиочастотных и акустических датчиках. Существующие системы и способы обнаружения винтокрылых БПЛА с использованием радиочастотных датчиков обнаруживают источники радиоизлучения, которыми в винтокрылых БПЛА являются системы управления или передачи телеинформации, определяют их координаты при помощи гониометрических методов и других высокоточных методов определена координат.
Существующие акустические системы и способы обнаружения летательных аппаратов включают набор акустических датчиков или акустических антенн, предназначенных для приема акустических сигналов, блоков обработки, классификации и определения координат источников акустических сигналов.
Известна система и способ обнаружения винтокрылых беспилотных летательных аппаратов, описанные в патенте US 7957225 В2, в которых принимают акустический сигнал с БПЛА по его акустической модуляции по амплитуде и/или частоте помощью набора акустических датчиков, классифицируют источник акустического сигнала на основе спектрального анализа акустического сигнала, определяют горизонтальные координаты и высоту источника акустического сигнала на основе анализа, по меньшей мере четырех акустических сигналов, полученных от четырех акустических датчиков. Данные система и способ выбраны в качестве прототипа заявленного изобретения.
Недостатком системы и способа прототипа является недостаточная точность определения типа и параметров винтокрылого БПЛА и информативность данных о винтокрылом БПЛА вследствие отсутствия возможности автоматического видеонаблюдения за винтокрылым БПЛА в дополнение к методам обнаружения БПЛА с помощью спектрального и временного анализа акустического сигнала, а также очень большая сложность и стоимость.
Известна система и способ обнаружения винтокрылых беспилотных летательных аппаратов, см. патент РФ №2593439.
Изобретение относится к области систем безопасности, предназначенных для предотвращения несанкционированного доступа БПЛА в контролируемую зону и отслеживания перемещения винтокрылых БПЛА в контролируемой зоне с одновременной их аутентификацией. Техническим результатом изобретения является создание системы и способов обнаружения винтокрылых беспилотных летательных аппаратов с увеличенной точностью определения типа и параметров винтокрылого БПЛА и увеличенной информативностью данных о винтокрылом БПЛА за счет автоматического видеонаблюдения за винтокрылым БПЛА в дополнение к методам обнаружения БПЛА с помощью спектрального и временного анализа акустического сигнала акустическими датчиками. Акустические сигналы, издаваемые БПЛА это, в основном, шум работы двигателя и шум пропеллера(ров).
Недостатки те же, что и в предыдущем патенте. Кроме того, система не работоспособна в условиях сильных шумов и в плохих метеоусловиях: сильный ветер, снегопад, гроза. К тому же очень сложное техническое решение и система стационарна.
Также известен способ обнаружения БПЛА с помощью пассивных РЛС, так называемой теплорадиолокации, но он не эффективен против малоразмерных БПЛА.
Известен способ обнаружения БПЛА, выполненных из композитных или их других радиопрозрачных материалов, летящих на малых высотах и имеющих небольшие размеры. Способ основан на применении РЛС миллиметрового диапазона, эти зондирующие сигналы отражаются не от корпуса БПЛА, а от составных частей системы управления и радиосвязи, таких как провода, печатные платы, ИМС и др.
Недостатки: требуется очень высокая чувствительность приемника РЛС и сложная цифровая алгоритмическая обработка отраженных сигналов при низком соотношении сигнал/шум и как следствие большие погрешности определения координат БПЛА.
Проблема защищенности от БПЛА имеет фундаментальный характер и может быть решена путем совершенствования существующей техники прицельных помех. Использование заградительных помех с земли неэффективно из-за энергетических проблем. Оценки показывают, что потребная мощность наземного передатчика заградительных помех сопоставима с мощностью ДнепроГЭСа! Допустим, что ДнепроГЭС находится в нашем распоряжении постоянно. Тогда заградительная помеха лишит собственные войска возможности пользоваться радиосвязью.
В настоящее время единственным эффективным способом борьбы с БПЛА при их обнаружении является защитный стрелковый огонь из автоматического оружия, применение же ракетного оружия слишком дорого и даже очень и все равно не дает 100% результата.
Таким образом обнаружение БПЛА является очень сложной задачей и в настоящее время не существует достаточного приемлемого способа ее решения, там более определения его координат.
Известны РЛС обнаружения малоскоростных и малоразмерных целей зарубежного и отечественного производства, см. книгу А.А. Лавров и П.К. Антонов «Многолучевые радиолокаторы борьбы с дронами» - Прототип ISBN 978-5-93108-209-7.
Приведенные типы РЛС основаны на классическом принципе радиолокации: зондирующий электромагнитный сигнал - отраженный принятый ответ и его алгоритмическая обработка по СПО.
Недостаток приведенных в книге примеров следующий:
- эффективная площадь рассеивания цели ≥0,5 м2;
- очень сложная алгоритмическая обработка;
- большие погрешности измерения дальности и углов азимута и места;
- недостаточная помехоустойчивость;
- сложность определения дронов в «Волчьей стае» (количество ≈ до 100 шт.).
Технической задачей изобретения является безусловное обнаружение малоскоростных и малоразмерных и низколетящих воздушных целей, таких как беспилотные летательные аппарата, также вычисление их параметров полета: дальность, высота и угловые координаты.
Технический результат достигается за счет применения нелинейной РЛС с наличием переотражающей поверхности на борту БПЛА в виде любого нелинейного активного элемента типа р-n (n-р) перехода, выполняющего(-щих) роль нелинейного рассеивателя (HP), так называемой «метки», при этом имеем:
- две зондирующие импульсные двухчастотные последовательности;
- переотраженные ответные последовательности и их цифровая обработка.
Для решения поставленной задачи предлагается радиолокационная система обнаружения малоскоростных и малоразмерных БПЛА, характеризующаяся тем, что в качестве РЛС обнаружения применена нелинейная РЛС - НРЛС, а в качестве отражающих элементов в БПЛА использованы нелинейные перемножающие рассеиватели - HP в виде р-n и/или n-р переходов электронных блоков, причем нелинейная РЛС содержит следующие узлы и блоки: задающий генератор - ЗГ, первый - четвертый умножители частоты, первый и второй передатчики, вычислитель, первый и второй фазовые детекторы, первый и второй приемники, первая и вторая передающие антенны, первая и вторая приемные антенны со следующими соединениями: выход ЗГ частотой f0 соединен с входами первого, второго третьего и четвертого умножителей частоты, выход первого умножителя частоты соединен с первым передатчиком, выход второго умножителя частоты соединен со втором передатчиком, выходы которых через первую и вторую передающие антенны соединены с квазиприемно-передающей антенной, выход которой соединен с антеннами первого и второго приемника соответственно, выходы этих приемников соединены с сигнальными входами фазовых детекторов, с опорными входами которых соединены выходы третьего и четвертого умножителей, выходы первого и второго фазового детектора соединены с первым и вторым информационными входами вычислителя соответственно; выход вычислителя является выходом системы.
Любой БПЛА, оборудованный радиоканалом для связи с оператором пункта наведения, или имеющий на борту автономную инерциальную систему наведения на цель (без связи с оператором) имеет в их составе активные элементы типа хотя бы р-n (n-р) перехода.
Эти переходы выполняют при их облучении зондирующими электромагнитными СВЧ-волнами fзонд роль нелинейного рассеиваетеля (HP), т.е. они переизлучают зондирующие сигналы с частотами 2fзонд - 3Гзонд- 4fзонд и т.д. Эти переизлучатели частоты принимаются НРЛС, обрабатываются и по ним определяется местонахождение БПЛА: высота, дальность до НРЛС, углы азимута и места, которые вводятся в пункт управления огневой установки типа «Шилка», «Тунгуска» и др. для уничтожения БПЛА. Все это в реальном масштабе времени.
На фиг. 1 показана модель канала взаимодействия НРЛС - HP.
На ней изображено, кроме обозначенных в прямоугольниках:
fЗС - частота зондирующего сигнала (ЗС);
R1 - расстояние от антенны ЗС до приемной антенны HP;
fРС - частота отраженного сигнала от HP;
nfС - гармоники зондирующего сигнала;
R2 - расстояние от переизлучений HP до приемной антенны НРЛС.
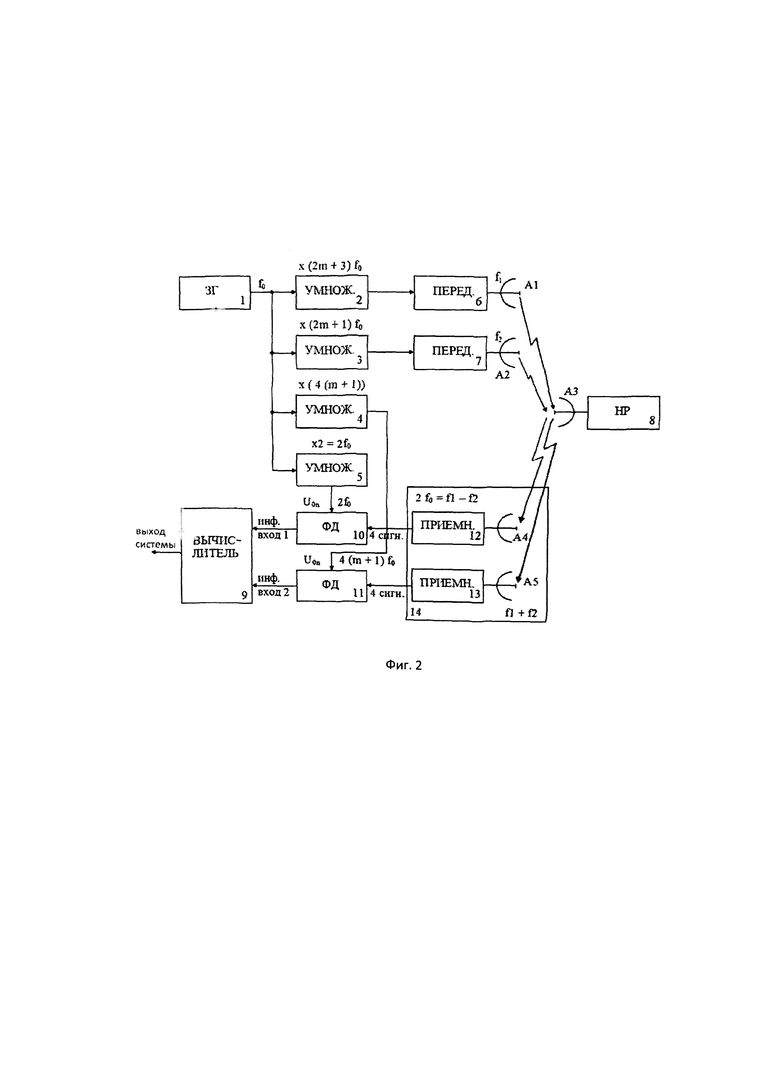
На фиг. 2 представлена структурная электрическая схема нелинейной РЛС.
1 - задающий генератор (ЗГ);
2, 3, 4 и 5 - умножители частоты;
6 - первый передатчик;
7 - второй передатчик;
8 - нелинейный рассеиватель - активные элементы БПЛА;
9 - вычислитель;
10, 11 - первый и второй фазовые детекторы (ФД) соответственно;
12, 13 - первый и второй приемники соответственно;
А1 и А2 - первая и вторая передающие антенны соответственно;
A3 - приемопередающие элементы HP; (квазиантенны)
А4 и А5 - первая и вторая приемные антенны соответственно.
Схема на фиг. 2 имеет следующие соединения.
Выход ЗГ 1 частотой  соединен с входами первого, второго, третьего и четвертого умножителей частоты (блоки 2, 3, 4 и 5 соответственно), выход первого умножителя частоты соединен с первым передатчиком 6, выход второго умножителя частоты соединен со вторым передатчиком 7, выходы которых через первую и вторую передающие антенны соединены с приемо-передающими активными элементами HP 8, выходы которых соединены с антеннами А4 и А5 первого и второго приемника 12 и 13 соответственно, выходы, этих приемников соединены с сигнальными входами ФД 10 и ФД 11 также соответственно, с опорными входами которых соединены выходы третьего и четвертого умножителей 4 и 5 также соответственно, выходы первого и второго ФД соединены с первым и вторым информационными выходами вычислителя 9; выход вычислителя 9 соединен с центральным процессором оператора системы. Схема на фиг. 2 работает следующим образом.
соединен с входами первого, второго, третьего и четвертого умножителей частоты (блоки 2, 3, 4 и 5 соответственно), выход первого умножителя частоты соединен с первым передатчиком 6, выход второго умножителя частоты соединен со вторым передатчиком 7, выходы которых через первую и вторую передающие антенны соединены с приемо-передающими активными элементами HP 8, выходы которых соединены с антеннами А4 и А5 первого и второго приемника 12 и 13 соответственно, выходы, этих приемников соединены с сигнальными входами ФД 10 и ФД 11 также соответственно, с опорными входами которых соединены выходы третьего и четвертого умножителей 4 и 5 также соответственно, выходы первого и второго ФД соединены с первым и вторым информационными выходами вычислителя 9; выход вычислителя 9 соединен с центральным процессором оператора системы. Схема на фиг. 2 работает следующим образом.
В качестве нелинейного локатора для данной задачи выбран фазовый НЛРС с комбинационным преобразованием частоты на HP.
HP состоит из антенной системы, согласующего устройства и нелинейного преобразователя частоты зондирующего сигнала (р-n переход). Относительный уровень вторичных сигналов зависит от конструкции, геометрических размеров, электрических свойств HP, ее положения и расстояния относительно локатора. Преобразование частоты в HP осуществляется на любом активном элементе БПЛА.
Для получения двушкального отсчета дальности в НРЛ используются колебания двух зондирующих частот  Прием сигналов от НРЦ ведется дпухкапальным приемником на k-x гармониках кодирующих частот:
Прием сигналов от НРЦ ведется дпухкапальным приемником на k-x гармониках кодирующих частот:  Число k на практике следует выбирать равным двум или трем (при больших k ухудшается энергетика радиолинии, а при малых будет большой уровень СПП из-за внеполосного излучения передатчиков).
Число k на практике следует выбирать равным двум или трем (при больших k ухудшается энергетика радиолинии, а при малых будет большой уровень СПП из-за внеполосного излучения передатчиков).
Для обеспечения когерентности сигналов в колебания всех частот формируются путем умножения частоты задающего генератора (ЗГ)  в целое число раз. Таким же способом получаются и опорные колебания для фазовых дискриминаторов (ФД).
в целое число раз. Таким же способом получаются и опорные колебания для фазовых дискриминаторов (ФД).
На выходах ФД1 и ФД2 действуют напряжения, пропорциональные разностям фаз принятых и опорных колебаний, которые с учетом использованных на рис. 2 обозначений равны
Как следует из фиг. 2, при проектировании фазового НРЛ-мера необходимо выбрать три параметра:  m и k, исходя из предъявляемых требований: максимальной дальности измерения Rmax и требуемой точности δR.
m и k, исходя из предъявляемых требований: максимальной дальности измерения Rmax и требуемой точности δR.
Полагая, что максимальная разность фаз, однозначно измеряемая ФД, равна  из уравнений (7) и (8) получим:
из уравнений (7) и (8) получим:

где  - точность измерения разности фаз Фд2. Из (7) находим номинальную частоту ЗГ:
- точность измерения разности фаз Фд2. Из (7) находим номинальную частоту ЗГ:

Полагая  рад и подставляя в выражение (8) из
рад и подставляя в выражение (8) из  (9), получим оценку точности:
(9), получим оценку точности:

откуда находим

где  - символ целой части числа, стоящего в скобках.
- символ целой части числа, стоящего в скобках.
С точки зрения энергетики радиоканала коэффициент к следует выбирать равным двум или трем. Формулы (9) и (11) позволяют определить основные неэнергетические параметры НРЛС с фазовым измерением дальности, построенного по схеме рис. 2. При этом гарантируется согласование шкал грубого и точного отсчетов.
Алгоритм работы вычислителя для схемы фиг. 2 следующий. В соответствии с формулами (5) и (6) определяются оценки дальности по шкале грубого отсчета  и по шкале точного отсчета
и по шкале точного отсчета 


где N - число полных периодов колебаний частоты  (число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
(число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
Для определения величины N учтем, что фазовому запаздыванию  на частоте
на частоте  соответствует временная задержка
соответствует временная задержка

где  - период колебаний частоты
- период колебаний частоты
На этом интервале времени укладывается N полных периодов колебаний частоты  равных
равных  Разделив (16) на
Разделив (16) на  получим
получим 
Фазовый НРЛС с комбинационным преобразованием частоты На фиг. 2 изображена функциональная схема фазового НРЛС с комбинационным преобразованием частоты на HP, обеспечивающего точный и однозначный отсчет дальности. В локаторе применяются сигналы двух зондирующих частот  а прием осуществляется на комбинационных частотах
а прием осуществляется на комбинационных частотах  В таком варианте построения схемы разностная частота
В таком варианте построения схемы разностная частота  обеспечивает грубый, но однозначный отсчет дальности, а суммарная частота
обеспечивает грубый, но однозначный отсчет дальности, а суммарная частота  - точный, но неоднозначный отсчет.
- точный, но неоднозначный отсчет.
В схеме НРЛС, изображенной на фиг. 2 номинальные значения частот зондирующих и принимаемых сигналов следующие:

Двухчастотный прием позволяет реализовать высокоточное однозначное измерение дальности при условии согласования шкал грубого и точного отсчетов. Если же при двухчастотном приеме (двушкальном отсчете) согласовать требования по дальности и точности измерений не удается, то число шкал, определяемое числом принимаемых частот (числом каналов приема), может быть увеличено.
На выходах ФД1 и ФД2 действуют напряжения, пропорциональные разностям фаз принятых и опорных колебаний, которые с учетом использованных обозначений равны


Измеренные разности фаз подаются на вычислитель, вычисляющий оценку дальности  до HP.
до HP.
НРЛС имеет следующие особенности:
- измеритель имеет двушкальный отсчет дальности;
- используются компоненты суммарной и разностной частот преобразованных на нелинейном элементе HP сигналов;
- для обеспечения когерентности использованных колебаний (принимаемых и опорных) формирование сигналов осуществляется умножением частоты ЗТ  на целые числа: 2m+3; 2m+1; 4(m+1); 2m, что обеспечивает также согласование шкал грубого и точного отсчетов. Рассмотрим методику выбора неэнергетических параметром локатора при заданных максимальной дальности
на целые числа: 2m+3; 2m+1; 4(m+1); 2m, что обеспечивает также согласование шкал грубого и точного отсчетов. Рассмотрим методику выбора неэнергетических параметром локатора при заданных максимальной дальности  и точности измерения дальности
и точности измерения дальности  Примем, что погрешность измерения сдвига фаз может быть доведена до значения
Примем, что погрешность измерения сдвига фаз может быть доведена до значения 

Отсюда находим номинальную частоту ЗГ:

Для нахождения параметра m разрешим выражение (3) относительно R и запишем полученное соотношение в вариациях 

Принимая  рад и подставив
рад и подставив  из (5), получим
из (5), получим

откуда находим

Таким образом, по формулам (5) и (10) можно определить два основных неэнергетических параметра НРЛС с фазовым методом измерения дальности: частоту ЗГ  и параметр m, через который выражаются коэффициенты умножения частоты в НРЛС-комб по схеме фиг. 1 [см. (1)] Алгоритм работы вычислителя следующий.
и параметр m, через который выражаются коэффициенты умножения частоты в НРЛС-комб по схеме фиг. 1 [см. (1)] Алгоритм работы вычислителя следующий.
Согласно формулам (2) и (3) с учетом (1) определяются оценки дальности по шкале грубого отсчета  и по шкале точного отсчета
и по шкале точного отсчета 


где N - число полных периодов колебаний частоты 
 (число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
(число полных длин волн на удвоенном расстоянии от НРЛС до HP), которое с помощью ФД2 не фиксируется.
Для определения величины N учтем, что фазовому запаздыванию  на частоте
на частоте  соответствует временная задержка
соответствует временная задержка

где  - период колебаний разностной частоты
- период колебаний разностной частоты  равный
равный 
На этом интервале времени укладывается N полных периодов колебаний частоты,  равных
равных  Разделив (28) на
Разделив (28) на  получим
получим

Таким образом, вычислитель фазового НРЛС с комбинационным преобразованием частоты a HP в соответствии с (14) вычисляет число N по измеренному отсчету  а затем по формуле (12) дает оценку расстояния от НРЛС до HP.
а затем по формуле (12) дает оценку расстояния от НРЛС до HP.
Кроме фазового метода измерения дальности, в НРЛС могут применяться импульсный и частотный методы. Однако они, обладая пространственным разрешением по дальности, для обеспечения тех же точностных характеристик, что и фазовый метод, требуют значительного усложнения аппаратуры, поскольку в импульсном методе для зондирования необходимы наносекундные импульсы, а m частотном методе - ЛЧМ-сигналы с девиацией частоты в несколько сотен мегагерц.
Таким образом, фазовый метод измерения дальности до БПЛА HP и его скорости имеет существенные преимущества по точности и простоте аппаратурной реализации по сравнению с импульсным и частотным методами.
НРЛС, построенная по этому принципу, априори обладает высокой помехоустойчивостью.
Зная дальность обнаружения БПЛА и его скорость, а также угловое положение антенн (азимут и угол места) вычислитель определяет высоту полета БПЛА и его географические координаты, которые передаются на пульт наведения зенитно-ракетной установки, например, «Шилка» ил «Тунгустка» для принятия решения об открытии огня.
Станция обнаружения БПЛА может работать в секторном решении обзора или в круговом с определением координат БПЛА и дальности до него с передачей их на защитную установку типа «Шилка» или зенитно-ракетную типа «Панцирь» или на любую другую. Также такая станция может иметь собственную энергетическую установку с импульсным генератором большой мощности до нескольких мегаватт, которая по лучу станции обнаружения передает на обнаруженный БПЛА и выведет из строя всю его электронную начинку. Как и РЛС с фазированными решетками данная система также эффективна и в обнаружения БПЛА в режиме «волчьей стаи», т.е. одновременной атаки в большом количестве порядка 50 - 100 и более штук, как было в Сирии при атаке нашей авиабазы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| НЕЛИНЕЙНАЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2008 |
|
RU2397509C2 |
| СНАЙПЕРСКАЯ ВИНТОВКА | 2022 |
|
RU2810061C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038613C1 |

Изобретение относится к радиолокации и может быть использовано для обнаружения беспилотных летательных аппаратов (БПЛА), оборудованных радиоканалом связи и/или радиорелейным каналом с наземной станцией управления и наведения. Технический результат состоит в повышении точности обнаружения малоскоростных и малоразмерных и низколетящих воздушных целей. Для этого используют нелинейную РЛС с наличием переотражающей поверхности на борту БПЛА в виде любого нелинейного активного элемента, при этом используют две зондирующие импульсные двухчастотные последовательности и осуществляют цифровую обработку переотраженных ответных последовательностей. 2 ил.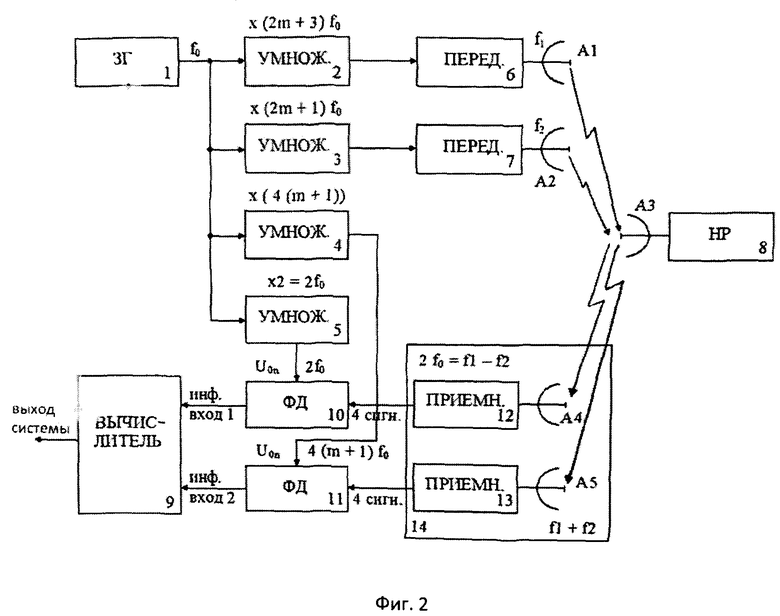
Нелинейная радиолокационная система обнаружения малоскоростных и малоразмерных беспилотных летательных аппаратов (БПЛА), оборудованных радиоканалом для связи с оператором пункта наведения или имеющий на борту автономную инерциальную систему наведения, содержащая задающий генератор (ЗГ), передатчик зондирующих электромагнитных СВЧ волн, соединенный с антенной, приемник отраженных СВЧ волн и вычислитель, отличающаяся тем, что дополнительно введены второй передатчик зондирующих электромагнитных СВЧ волн и второй приемник отраженных СВЧ волн, соединенные с соответствующими антеннами, а также четыре умножителя, входы которых соединены с задающим генератором и два фазовых детектора, выходы которых соединены с вычислителем, при этом выходы первого и второго умножителя соединены с входами соответствующих передатчиков, а выходы третьего и четвертого умножителя соединены с опорными входами соответствующих фазовых детекторов, входы первого и второго фазовых детекторов соединены с выходами соответствующих приемников, осуществляющими прием на k гармониках кодирующих частот, где k равно двум или трем, коэффициент умножения умножителя есть целое число, при этом вычислитель выполнен с возможностью определения дальности до БПЛА посредством фазового метода, двухчастотного и импульсного метода измерения.
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ВИНТОКРЫЛЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593439C1 |
| US 7957225 В2, 07.06.2011 | |||
| Беспилотная система активного противодействия БПЛА | 2017 |
|
RU2669881C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| US 9715009 B1, 25.07.2017 | |||
| ОБЪЕМНЫЙ РАСХОДОМЕР ЖИДКОСТИ ИЛИ ГАЗА | 0 |
|
SU164139A1 |

