Область техники
Изобретение относится к области радиолокации, конкретно к радиолокационным станциям (РЛС) обнаружения малоразмерных целей и может быть использовано для контроля воздушного пространства.
Уровень техники
Известны радиолокационные станции (РЛС) обнаружения малоразмерных целей /RU 134309, RU 2149421, RU 2150716, RU 2498337, RU 2522982, RU 2608338, RU 2615988, RU 2615988, RU 2669702, 2678822, RU 2711115/, основанные на основе эффекта отражения электромагнитных волн от обшивки летательного аппарата.
Недостатком известных РЛС является невидимость малоразмерных целей типа мини и микро БПЛА, выполненных из радиопрозрачных материалов, например, из пластмассы.
Желательно иметь РЛС для дополнительного обнаружения малоразмерных целей, выполненных из радиопрозрачных материалов.
Таких РЛС в известном уровне техники не выявлено.
Задачей изобретения является создание РЛС, способных обнаруживать как непрозрачные, так и прозрачные для радиоволн малоразмерные цели.
Техническим результатом, получаемым от решения данной задачи является увеличение надежности контроля воздушного пространства за счет расширения функциональных возможностей РЛС по обнаружению целей.
Сущность изобретения
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что радиолокационная станция (РЛС) обнаружения малоразмерных целей содержит зеркальную приемопередающую антенну кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости. Антенна соединена по сигналам зондирования через антенный переключатель и передатчик с формирователем последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности. По ответным сигналам она соединена через антенный переключатель, четырехканальный приемник сигналов горизонтальной и вертикальной поляризации, устройство поляризационной обработки сигналов, цифровой коррелятор, автоматизированное рабочее место (АРМ) с радиомодемом связи РЛС 1 с командным пунктом контроля воздушного пространства. При этом ЗС наносекундной и микросекундной длительности формирователя выполнены соответственно немодулированными и с внутриимпульсной модуляцией с паузой между ними доли мкс и разнесением их по частоте на 1-10 МГц.
Доказательство достижения заявленного технического результата
Такое выполнение РЛС 2 и использование в ней зондирующих сигналов различной длительности и модуляции, разнесение их по частоте, четырехканальный прием ответных сигналов горизонтальной и вертикальной поляризации, поляризационная и корреляционная обработка принятых сигналов позволяют обнаруживать не только малоразмерные летательные аппараты (ЛА) с малой радио отражающей поверхностью, но и радиопрозрачные ЛА типа мини и микро беспилотные летательные аппараты (БПЛА), выполненные из радиопрозрачного диэлектрического материала, например из пластмассы, за счет регистрации разности диэлектрической проницаемости таких БПЛА и окружающего их воздуха.
В целом указанные технические преимущества РЛС обеспечивают достижение заявленного технического результата, а именно расширяют функциональные возможности РЛС за счет возможности обнаружения радиопрозрачных летательных аппаратов и, как следствие, увеличивают надежность контроля воздушного пространства при массовом налете БПЛА.
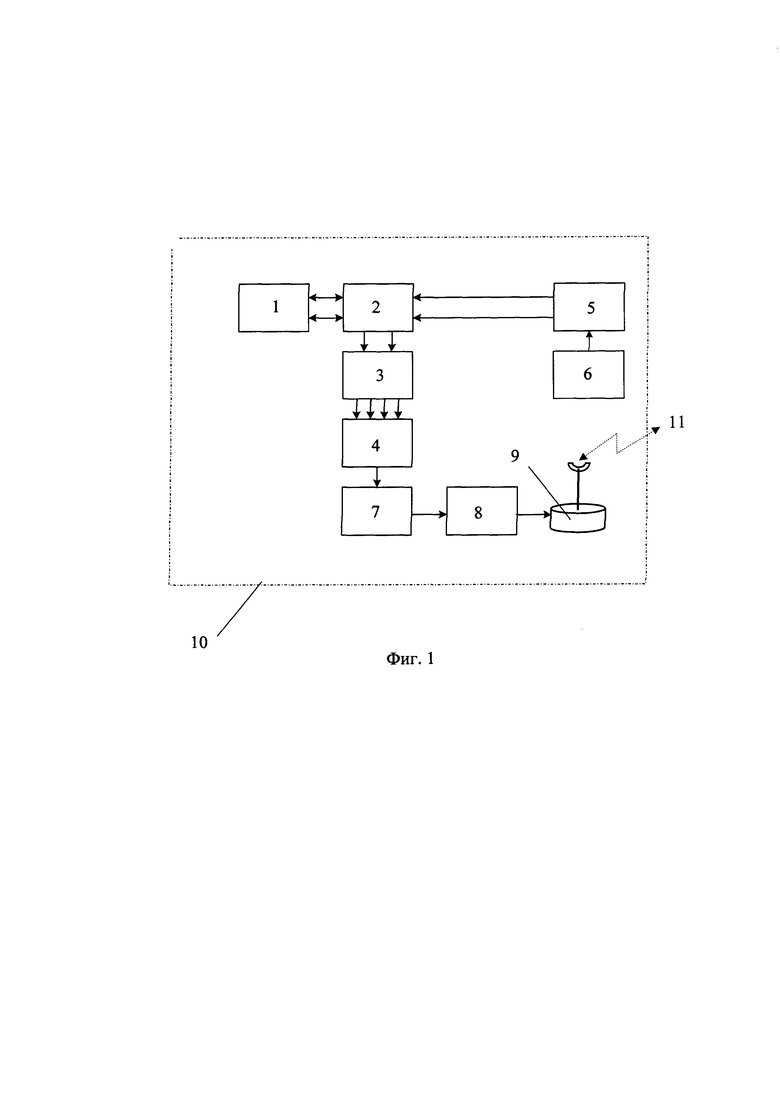
Сущность изобретения поясняется функциональной схемой РЛС, представленной на фиг. 1.
Позициями на фиг. 1 обозначены:
1 - радиолокационная станция (РЛС);
1.1 - антенна кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости;
1.2 - антенный переключатель;
1.3 - четырехканальный приемник сигналов горизонтальной и вертикальной поляризации;
1.4 - устройство поляризационной обработки сигналов;
1.5 – передатчик;
1.6 - формирователь последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности;
1.7 - цифровой коррелятор;
1.8 - автоматизированное рабочее место (АРМ) оператора РЛС 1;
1.9 - радиомодем связи;
2 - командный пункт контроля воздушного пространства.
Раскрытие конструкции предлагаемой РЛС
Радиолокационная станция (РЛС) 1 обнаружения малоразмерных целей содержит зеркальную приемопередающую антенну 1.1 кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости. Антенна 1.1 выполнена четырехканальной в виде рефлектора, установленного на опорно-поворотном устройстве и четырех контррефлекторов, установленных в фокусе рефлектора (на фигуре не показано). При этом два контррефлектора верхнего и нижнего лучей выполнены с вертикальной поляризации, а два других – с горизонтальной поляризации и соединены по сигналам зондирования через антенный переключатель 1.2 и передатчик 1.5 с формирователем 1.6 последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности. По ответным сигналам антенна 1.1 соединена через антенный переключатель 1.2, четырехканальный приемник 1.3 сигналов горизонтальной и вертикальной поляризации, устройство 1.4 поляризационной обработки сигналов, цифровой коррелятор 1.7, автоматизированное рабочее место (АРМ) 1.8 РЛС 1 с радиомодемом 1.9 связи РЛС 1 с командным пунктом 2 контроля воздушного пространства.
При этом ЗС наносекундной (n нс) и микросекундной (N мкс) длительности формирователя 1.6 выполнены широкополосными соответственно немодулированными и с внутриимпульсной модуляцией, с паузой между ними (N+n мкс) и разнесением их по частоте на 1-10 МГц. Выход формирователя 1.6 по ЗС – сигналам соединен с входом передатчика 1.5. Передатчик 1.5 выполнен в виде твердотельного сверхвысокочастотного (СВЧ) усилителя широкополосных ЗС и через - антенный переключатель 1.2 соединен с излучателями антенны 1.1. Антенна 1.1 по принятым эхо-сигналам (ЗС), отраженным от воздушных объектов, через антенный переключатель 1.2 соединена с входами четырехканального приемника 1.3 сигналов горизонтальной и вертикальной поляризации. Каналы приемника 1.3 выполнены с возможностью оптимального режектирования, усиления, преобразования и детектирования принятых эхо-сигналов. На входах приемных каналов установлены защитные устройства и ограничители для защиты малошумящих усилителей каналов от просачивающейся сверхвысокочастотной (СВЧ) энергии собственного передатчика 1.5 и сигналов внешних радиотехнических средств. Каждый канал приемника 1.3 выполнен по супергетеродинной схеме с однократным или двукратным преобразованием частоты (на фигуре не показано). При этом два канала приемника 1.3 являются каналами верхнего и нижнего лучей вертикальной поляризации, а два других левого и правого лучей – каналами горизонтальной поляризации. Выходы каналов по промежуточной частоте через аналого-цифровые преобразователи (АЦП) и цифровые фазовые детекторы – формирователи квадратурных составляющих эхо-сигналов соединены с сигнальными выходами приемника 1.3. Сигнальные выходы приемника 1.3 соединены с входом цифрового устройства 1.4 поляризационной обработки сигналов. Устройство 1.4 поляризационной обработки сигналов выполнено четырехканальным (по числу приемных каналов). Каждый канал цифровой обработки устройства 4 снабжен программными средствами фильтрации несинхронных импульсных помех, сжатия сложного сигнала с внутриимпульсной модуляцией и спектральной обработки принятых сигналов с привязкой к пространственным координатам (дальность, азимут) каждой цели. Сигнальные выходы устройства 1.4 соединены с входами цифрового коррелятора 1.7. Коррелятор 1.7 снабжен цифровыми программами корреляционной обработки сигналов и адаптивной селекции движущихся целей. Из принятых сигналов формируются координатные отметки целей и данные о скоростях и направлению их движения. По сигнальным выходам коррелятор 1.7 соединен с автоматизированным рабочим местом (АРМ) 1.8 оператора РЛС 1. АРМ 1.8 содержит соединенные интерфейсными линиями связи управляющую ЭВМ, стационарный и выносной пункты управления (на фигурах не показано). ЭВМ АРМ 1.8 снабжена блоком автоматизированных программ контроля и управления (АПКУ) функционированием РЛС 1 и ее боевой работой. Блок АПКУ АРМ 1.8 выполнен с возможностью траекторной обработки радиолокационной информации (РЛИ) в зоне ответственности РЛС 1, диагностирования её технического состояния и локализации неисправности (отказа) с точностью до конструктивно и функционально законченного элемента РЛС 1, а также с возможностью формирования команд управления режимами ее работы, а также включения и отключения аппаратуры РЛС 1 со стационарного и выносного пункта управления АРМ 1.8.
Выход АРМ 1.8 по результатам воздушной обстановки в зоне ответственности РЛС 1 через радиомодем 1.9 связи соединен с командным пунктом 2 контроля воздушного пространства.
Работа РЛС 1
РЛС 1 работает следующим образом.
Широкополосные зондирующие сигналы (ЗС) с внутриимпульсной модуляцией длительностью от единиц наносекунд до сотен микросекунд с заданным периодом зондирования генерируются формирователем 1.6 ЗС. Для перекрытия всех дальностей от минимальной до максимальной дальности применяется последовательность ЗС: короткого немодулированного (n нс) и длинных с внутриимпульсной модуляцией (N мкс) с паузой между ними N+n мкс и разнесением по частоте на 1-10 МГц. С формирователя 1.6 сформированная последовательность ЗС поступает на передатчик 1.5. Передатчик 1.5 переносит принятую последовательность ЗС на несущую частоту электромагнитного излучения (ЭМИ) сантиметрового диапазона электромагнитных волн (ЭМВ). Далее ЭМИ с передатчика 1.5 через антенный переключатель 1.2 передаются на антенну 1.1 излучаются в эфир. Отраженные от целей и фона эфира ЗС (эхосигналы) принимаются четырехканальной антенной 1.1 и далее через переключатель 1.2 поступают на четырехканальный приемник 1.3. В каждом канале приемника 1.3 производится одновременное оптимальное режектирование, усиление, преобразование, детектирование принятых эхо-сигналов соответствующей поляризации. Результаты первичной обработки сигналов каждого канала преобразуются в цифровую форму и передаются на цифровое устройство 1.4 поляризационной обработки сигналов 1.4. В устройстве 1.4 производится цифровая обработка сигналов каждой поляризации, включая фильтрацию несинхронных импульсных помех, сжатие сложных сигналов с внутриимпульсной модуляцией. спектральную их обработку и привязку к пространственным координатам (дальность, азимут и высота) каждой отметки от цели. Измерение высоты целей производится по измерению разности фаз и отношению амплитуд между каналами верхнего и нижнего лучей на каждой из двух применяемых поляризаций. Далее результаты цифровой обработки эхосигналов с вертикальной и горизонтальной поляризацией с устройства 1.4 передаются на цифровой коррелятор 1.7. В корреляторе 1.7 путем корреляционной обработки производится объединение канальной информации и привязка их к единым отметкам цели по дальности и азимуту. В результате корреляционной обработки сложные сигналы сжимаются до элемента разрешения n нс, обеспечивая высокую разрешающую способность по дальности. Далее в корреляторе 1.7 производится адаптивная селекция движущихся целей. Из принятых сигналов формируются координатные отметки целей и данные о скоростях и направлению их движения. Объединенные данные о целях с коррелятора 1.7 поступают в АРМ 1.8. В блоке АПКУ АРМ 1.8 производится автоматическая траекторная обработка данных о целях, а также - распознавание типа целей по их спектральным, поляризационным и траекторным признакам и формируется трассовая информация по распознанным целям. Оператор РЛС 1 со стационарного или выносного пункта управления АРМ 1.8 имеет возможность в ручном режиме корректировать работу РЛС 1 по обнаружению и распознаванию типа целей в зоне её видимости.
Результаты траекторной и поляризационной обработки эхосигналов в зоне наблюдения РЛС 1 через радиомодем 1.9 связи передаются на командный пункт 2 контроля воздушного пространства.
Промышленная применимость
Изобретение РЛС 1 для обнаружения малоразмерных целей выполнено на уровне опытного образца. Опытные испытания РЛС 1 показали возможность перехода на новые принципы наблюдения малоразмерных малоскоростных целей. Такая возможность и достижение заявленного технического результата связана со следующими отличительными особенностями РЛС 1.
Первой особенностью РЛС 1 является то, что в предложенной радиолокационной станции используется несколько типов широкополосных (или сверхширокополосных) сигналов с низкой импульсной мощностью: n нс для обеспечения ближней зоны обзора и сложные сигналы с внутриимпульсной модуляцией N мкс для обеспечения дальней зоны обзора до 10-100 км. Разнос частот по типам сигналов позволяет устранить взаимное влияние на обнаружение объектов. Широкая полоса сигналов (более 10 МГц) обеспечивает высокую разрешающую способность РЛС при обнаружении и сопровождении малоразмерных объектов, в том числе БПЛА, на фоне мощных отражений от более крупных объектов (местных предметов, метеообразований и т.д.).
Вторая особенность РЛС 1 заключается в том, что обзор пространства осуществляется с использованием изменения периодов повторения для работы адаптивной системы селекции движущихся целей (АСДЦ). Функционирование АСДЦ заключается в оценке спектральных свойств распределенных помех (отражений от местных предметов и метеообъектов) и выделении сигналов от целей (в том числе малоскоростных) при отличии их спектральных свойств от свойств помех. Такая система АСДЦ позволяет сопровождать не только движущиеся, но и зависающие БПЛА (с нулевой радиальной скоростью).
Третьей особенностью РЛС 1 является наличие программных модулей распознавания БПЛА (на фоне птиц и других малоскоростных объектов) путем спектральной, поляризационной и траекторной обработки принятых сигналов.
Четвертой особенностью РЛС 1 является применение фазового способа измерения высоты целей по измерению разности фаз и отношению амплитуд между каналами верхнего и нижнего лучей на каждой из двух применяемых поляризаций.
В целом указанные отличительные особенности позволяют расширить функциональных возможности РЛС 1 за счет возможности обнаружения радиопрозрачных и радионепрозрачных, движущихся и зависших воздушных целей. Расширение функциональных возможности РЛС 1 в свою очередь позволяет увеличить надежность контроля воздушного пространства в зоне ответственности РЛС при массовом налете БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| СПОСОБ И КОМПЛЕКС БАРЬЕРНОГО ЗЕНИТНОГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА БАЗЕ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2015 |
|
RU2615988C1 |
| Устройство разрешения составляющих плотного порядка групповой воздушной цели по дальности и азимуту | 2021 |
|
RU2778829C1 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
Изобретение относится к области радиолокации, конкретно к радиолокационным станциям (РЛС) обнаружения малоразмерных целей, и может быть использовано для контроля воздушного пространства. Техническим результатом является увеличение надежности контроля воздушного пространства за счет расширения функциональных возможностей РЛС по обнаружению целей. Заявленная РЛС 1 содержит зеркальную приемопередающую антенну 1.1 кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости. Антенна 1.1 соединена по сигналам зондирования через антенный переключатель 1.2 и передатчик 1.5 с формирователем 1.6 последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности. По ответным сигналам она соединена через антенный переключатель 1.2, четырехканальный приемник 1.3 сигналов горизонтальной и вертикальной поляризации, устройство 1.4 поляризационной обработки сигналов, цифровой коррелятор 1.7, автоматизированное рабочее место 1.8 с радиомодемом 1.9 связи РЛС 1 с командным пунктом 2 контроля воздушного пространства. При этом ЗС наносекундной и микросекундной длительности формирователя 1.6 выполнены соответственно немодулированными и с внутриимпульсной модуляцией, с паузой между ними доли мкс и разнесением их по частоте на 1-10 МГц. РЛС позволяет обнаруживать радиопрозрачные и радионепрозрачные, движущиеся и зависшие воздушные цели. 1 ил.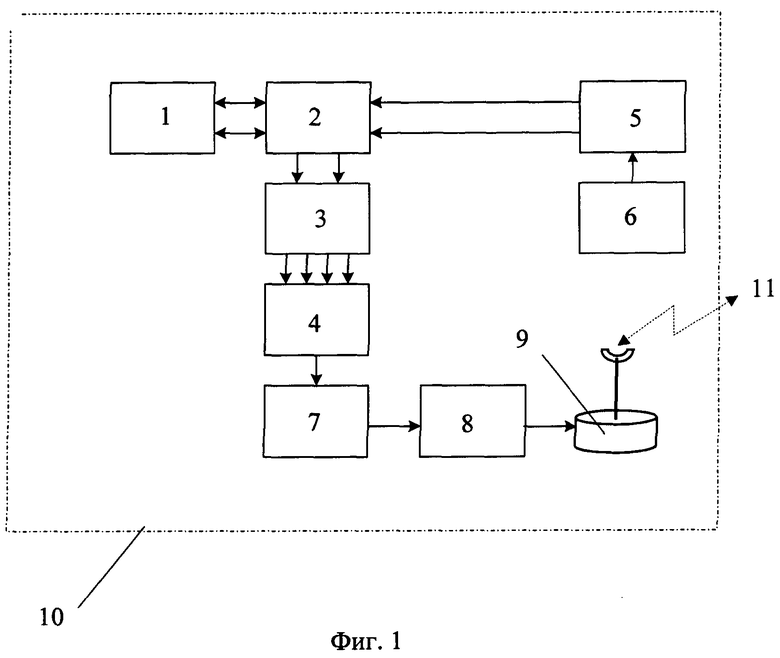
Радиолокационная станция (РЛС) обнаружения малоразмерных целей, характеризующаяся тем, что она содержит зеркальную приемопередающую антенну кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости, соединенную по сигналам зондирования через антенный переключатель и передатчик с формирователем последовательности зондирующих сигналов (ЗС) наносекундной и микросекундной длительности, а по ответным сигналам - через антенный переключатель, четырехканальный приемник сигналов горизонтальной и вертикальной поляризации, устройство поляризационной обработки сигналов, цифровой коррелятор, автоматизированное рабочее место (АРМ) РЛС и радиомодем связи с командным пунктом контроля воздушного пространства, причем ЗС наносекундной и микросекундной длительности выполнены соответственно немодулированными и с внутриимпульсной модуляцией с паузой между ними доли мкс и разнесением их по частоте на 1-10 МГц.
| Способ формирования диаграммы направленности цифровой антенной решеткой | 2016 |
|
RU2627958C1 |
| Устройство для измерения линейных размеров нагретых поковок | 1958 |
|
SU121942A1 |
| Способ измерения угла места (высоты) низколетящих целей под малыми углами места в радиолокаторах кругового обзора при наличии мешающих отражений от подстилающей поверхности | 2016 |
|
RU2630686C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ БИСЕРНОГО ПЕНОПОЛИСТИРОЛА | 0 |
|
SU178484A1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Дезинтегратор | 1929 |
|
SU15189A1 |
| CN 108333584 A, 27.07.2018 | |||
| JP 2004144725 A, 20.05.2004 | |||
| CN 109085539 A, 25.12.2018 | |||
| CN 110161474 A, 23.08.2019. | |||

