Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматической подачи фунгицидов на массив культурных растений.
Известен способ и устройство подачи гербицидов в зависимости от количества сорняков, регулируемых оптически с обработкой результатов при помощи ЭВМ. Способ реализуется устройством, содержащим опрыскиватель с емкостью для гербицидов, приспособления для их подачи, распылители, цветную видеокамеру, компьютер с базой данных, податель импульсов для включения и выключения распылителей в зависимости от количества сорняков, расположенных на просматриваемом участке поля (DE 4132637 А 01М 7/00 1996.10.15). Однако в известном устройстве расход гербицидов зависит от суммарного количество сорняков, попавших в поле зрения оптического датчика. При этом не учитывается индивидуальное местонахождение сорняков на опрыскиваемой площади и она опрыскивается вся. Что ведет к перерасходу гербицидов.
Наиболее близким по своей технической сущности является устройство для управляемой борьбы с сорняками, содержащее опрыскиватель с емкостью для фунгицидов, приспособление для их подачи, распылители, цветную видеокамеру закрепленную на транспортном средстве, податель команды на их расход (RU 2129785, 10.05.1999).
Недостатком данного технического решения является то, что цветная видеокамера при сканировании цветности поверхности поля вынуждена реагировать на вибрацию и колебания транспортного средства, особенно на вертикальные, в результате чего передаваемая ей картина получается нечеткой, что приводит к выдаче ложных команд и соответственно к перерасходу фунгицидов.
Задачей, решаемой настоящим изобретением является снижение не целевого расхода фунгицида за счет исключения выдачи ложных команд на его подачу.
Техническая сущность предлагаемого изобретения заключается в повышении качества картинки выдаваемой цветовой видеокамерой за счет уменьшения частоты и амплитуды ее колебаний вызванной колебанием транспортного средства агрегата от неровностей поля.
Настоящая задача решается тем, что в агрегате для управляемой борьбы с болезнями сельскохозяйственных культур, содержащем мобильное энергетическое средство, опрыскиватель, включающий емкость для фунгицидов, приспособление для их подачи и штангу с управляемыми распылителями, закрепленную на агрегате цветную видеокамеру, командный блок на расход фунгицидов, отличающийся тем, что цветная видеокамера закреплена на валу, установленном в подшипниковых опорах, центр тяжести которого смещен относительно его оси поворота, при этом величина смещения определяется исходя из неравенства:
где: Μ - масса вала
Η - расстояние от оси симметрии вала до оси его вращения
m - масса видеокамеры
h - расстояние от центра тяжести видеокамеры до оси вращения вала.
На фиг. 1 показана общая схема колесного агрегат для обработки сельскохозяйственных культур от болезней.
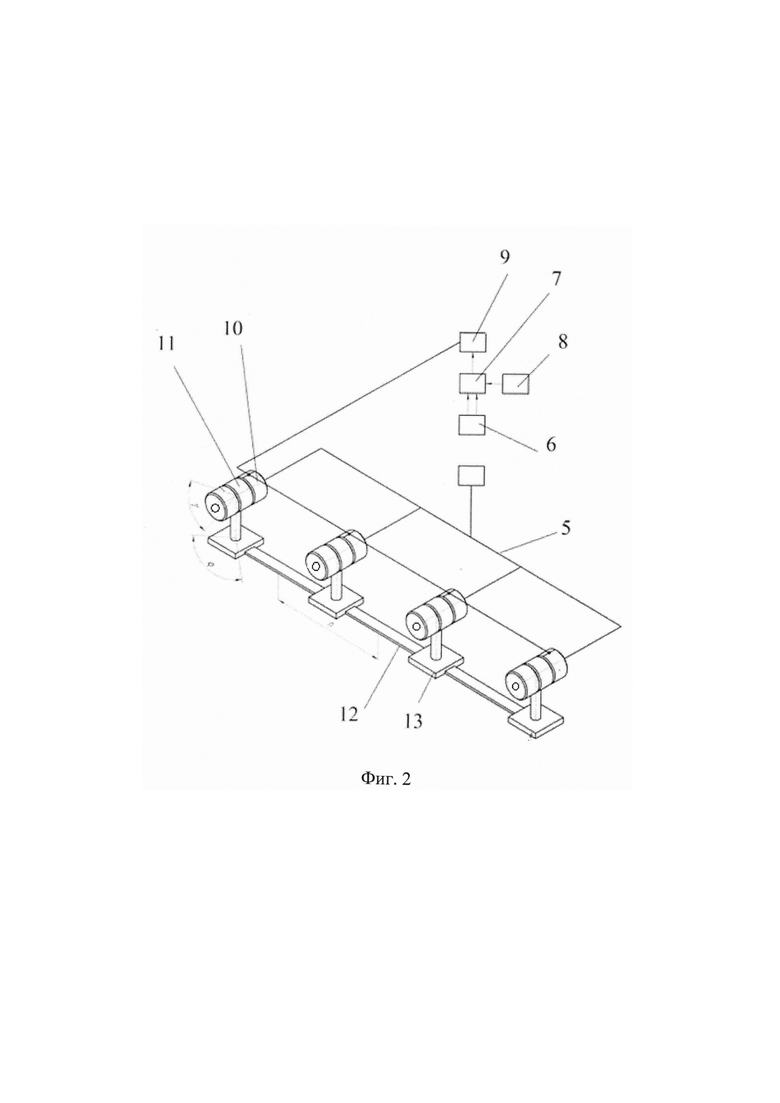
На фиг. 2 принципиальная схема работы агрегата.
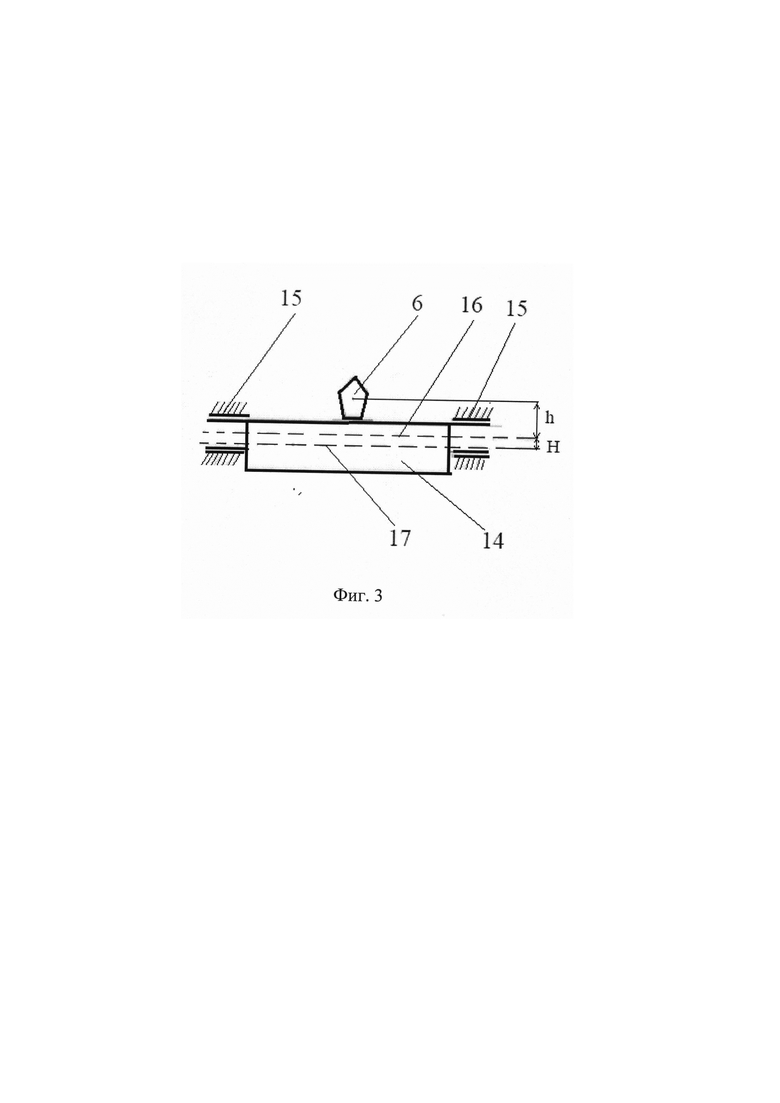
На фиг. 3 схема установки видеокамеры на валу в подшипниковых опорах.
Агрегат состоит из опрыскивателя, смонтированного на мобильном колесном энергетическом средстве 1 включающего емкость 2 для фунгицидов, штангу 3 с управляемыми распылителями 4. Емкость 2 опрыскивателя с помощью гидромагистрали 5 через насос и регулятор давления (на фиг. не показаны) соединена со штангой 3 и управляемыми распылителями 4. На мобильном энергетическом средстве 1 установлена цветная видеокамера 6, соединенная с анализатором изображения 7, задатчиком цвета 8. По сигналу задатчика цвета 8 анализатор изображения определяет наличие зараженной болезнью растительности, а командный блок 9, дает команду электроклапану 10 на подачу жидкости и регулятору 11 угла γ распыления распылителя 4, на поворот на угол ϕ в вертикальной плоскости и/или смещает распылители 4 в поперечно-горизонтальной плоскости на величину η по направляющим 12 исполнительным механизмом 13. Видеокамера 6 закреплена на валу 14 установленном в подшипниковых опорах 15. Для удержания вала 14 постоянно в одном положении ось вращения 16 вала 14 смещена относительно его оси симметрии 17 на величину Н, при этом нужно учитывать не только массу вала, но и массу видеокамеры и расстояние от ее центра тяжести до оси вращения вала 14.
В данном случае должно всегда соблюдаться неравенство при котором ось вращения видеокамеры будет устойчива и будут сглаживаться ее вертикальные колебания: вибрацию и угол поворота ее на валу при условии соблюдения неравенства: 
Тогда легко определяется один из неизвестных параметров, например, 
где: Μ - масса вала
Η - расстояние от оси симметрии вала до оси его вращения
m - масса видеокамеры
h - расстояние от центра тяжести видеокамеры до оси вращения вала.
Устройство работает следующим образом. При движении устройства в поле зрения цветовой видеокамеры находятся все управляемые распылители 4 и обрабатываются больные растения, под воздействием болезни, стеблестой которых изменил их цветность. В задатчике 8 цвета заболевших растений устанавливают, например, код желтого цвета. Когда на одном или нескольких участках обрабатываемого поля в цветную камеру поступает сигнал желтого цвета, анализатор изображений 7 выдает команду на включение соответствующего распылителя 4 через командный блок 9 и электроклапан 10. Если зараженный участок занимает неполную ширину η обрабатываемого участка, то анализатор 7 выдает команды на поворот распылителей 4 исполнительному механизму 11 угла поворота.
При вертикальный колебаниях, возникающих из за наезда транспортного средства на глубокую борозду или на ком земли агрегат получает вертикальное колебание, в то время как вал 14 со смещенным центром тяжести, независимо от места его расположения на агрегате и установлен в подшипниковых опорах, будет стремиться удержаться от колебаний, так как центр тяжести вала 14 смещенный от оси 17 его симметрии будет стремиться удержать его в положении направлении вектора тяжести к центру Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесный агрегат для обработки сельскохозяйственных культур от болезней | 2022 |
|
RU2790981C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |
| Автономный роботизированный комплекс для точечной борьбы с сорной растительностью | 2021 |
|
RU2767537C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| СПОСОБ ОБРАБОТКИ ХИМИКАТАМИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 1997 |
|
RU2128435C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Штанга опрыскивателя | 2023 |
|
RU2810004C1 |
| Устройство для обработки пестицидами и удобрениями пропашных овощных культур | 2021 |
|
RU2775491C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматической подачи фунгицидов на массив культурных растений. Агрегат для управляемой борьбы c болезнями сельскохозяйственных культур содержит мобильное энергетическое средство, опрыскиватель, включающий емкость для фунгицидов, приспособление для их подачи и штангу с управляемыми распылителями, закрепленную на агрегате цветную видеокамеру, командный блок на расход фунгицидов. Цветная видеокамера закреплена на валу, установленном в подшипниковых опорах, центр тяжести которого смещен относительно его оси поворота, при этом величина смещения определяется исходя из неравенства: М⋅Н>m⋅h, где: М - масса вала, Н - расстояние от оси симметрии вала до оси его вращения, m - масса фотокамеры, h - расстояние от центра тяжести видеокамеры до оси вращения вала. Техническим результатом является повышение качества картинки выдаваемой цветовой видеокамерой за счет уменьшения частоты и амплитуды ее колебаний, вызванной колебанием транспортного средства агрегата от неровностей поля, и за счет этого снижение нецелевого расхода фунгицида за счет исключения выдачи ложных команд на его подачу. 3 ил.
Агрегат для управляемой борьбы c болезнями сельскохозяйственных культур, содержащий мобильное энергетическое средство, опрыскиватель, включающий емкость для фунгицидов, приспособление для их подачи и штангу с управляемыми распылителями, закрепленную на агрегате цветную видеокамеру, командный блок на расход фунгицидов, отличающийся тем, что цветная видеокамера закреплена на валу, установленном в подшипниковых опорах, центр тяжести которого смещен относительно его оси поворота, при этом величина смещения определяется исходя из неравенства:
где: Μ - масса вала,
H - расстояние от оси симметрии вала до оси его вращения,
m - масса видеокамеры,
h - расстояние от центра тяжести видеокамеры до оси вращения вала.
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |
| Опрыскиватель с устройством для магнитно-импульсной обработки растений в плодовом питомнике | 2017 |
|
RU2654252C1 |
| СПОСОБ ОБРАБОТКИ РАСТЕНИЙ И ШТАНГОВЫЙ ОПРЫСКИВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256322C2 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| DE 102018203758 A1, 19.09.2019. | |||

