Изобретение относится к средствам для оборудования временных мостовых переходов, а более конкретно - к механизированным мостам и штурмовым мостам (мостоукладчикам).
Известны механизированные мосты и мостоукладчики (см. Руководство по материальной части и эксплуатации танкового мостоукладчика МТУ. Воениздат, 1963, с. 21; Руководство по материальной части и эксплуатации танкового мостоукладчика МТУ-20, 1969, с. 37), известны также аналогичные изобретения (см. RU 2212489 С2 от 20.09.2003 г., RU 2201486 С1 от 27.03.2003 г., RU 2210656 С2 от 20.08.2003 г., GB 1218435 А от 06.01.1971 г., DE 3837122 А от 03.05.1990 г., RU 2044820 С1 от 27.09.1995 г., RU 2324786 С2 от 20.05.2008 г). Также известен способ укладки военного моста US 7784134 В2 от 31.08.2010 г.
Недостатком известных механизированных мостов, особенно штурмовых мостов, является высокая вероятность поражения экипажа в результате огневого воздействия противника, особенно при установке мостового перехода в первых эшелонах наступающих войск. Недостатком способа установки военного моста (US 7784134 В2 от 31.08.2010 г.) является достаточно сложные конструкция, система управления и способ осуществления установки мостового перехода, снижающая его надежность.
Целью настоящего изобретения является исключение возможности поражения экипажа штурмового моста путем применения способа установки мостового перехода с применением дистанционно управляемого модуля с расстояния 6…7 км.
Решение указанной задачи достигается тем, что штурмовой мост размещают и транспортируют по автомобильным дорогам до рубежа перевода на дистанционное управление на полуприцепе, снабженном модулем для дистанционной транспортировки и установки мостового блока, и дополнительной опорной колесной парой в задней части полуприцепа. На рубеже перевода штурмового моста на дистанционное управление, который находится на расстоянии не ближе 6 км от переднего края позиций противника, модуль для дистанционной транспортировки и установки мостового блока перемещают из задней части полуприцепа в его переднюю часть, затем транспортируют мостовой блок к преодолеваемой преграде посредством модуля для дистанционной транспортировки и установки мостового блока на преграду, дистанционно управляемого из кабины тягача, с последующей установкой мостового блока на преграду по телескопической наводочной балке, смонтированной на полуприцепе.
Заявляемое изобретение направлено на решение задачи улучшения показателей безопасности штурмовых мостов путем дистанционной установки их мостовых блоков на преграду. Использование заявляемого устройства значительно снижает вероятность огневого поражения экипажа штурмового моста противником за счет дистанционного управления установкой мостовых переходов.
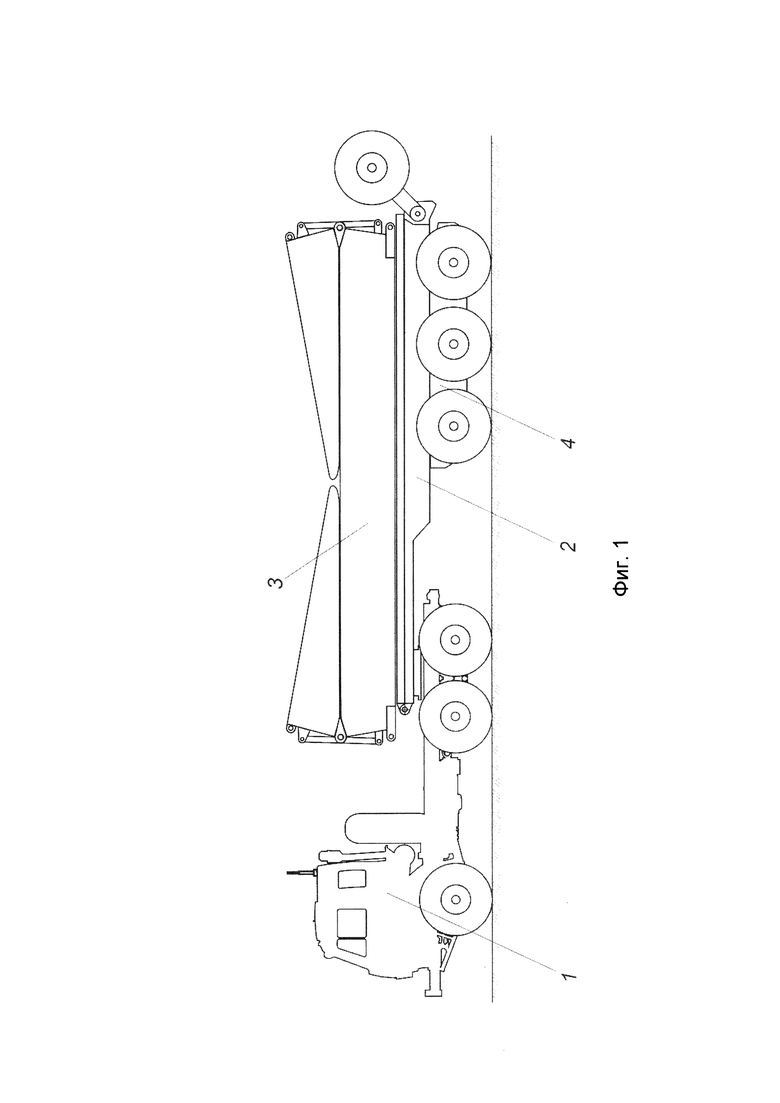
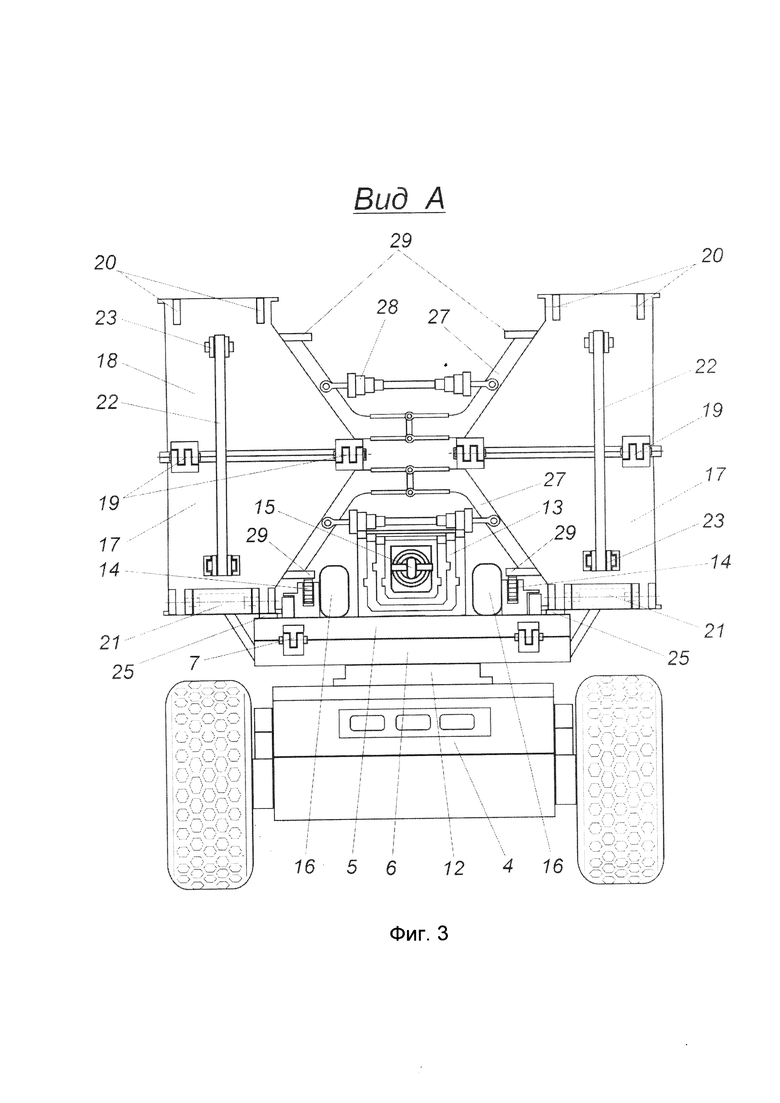
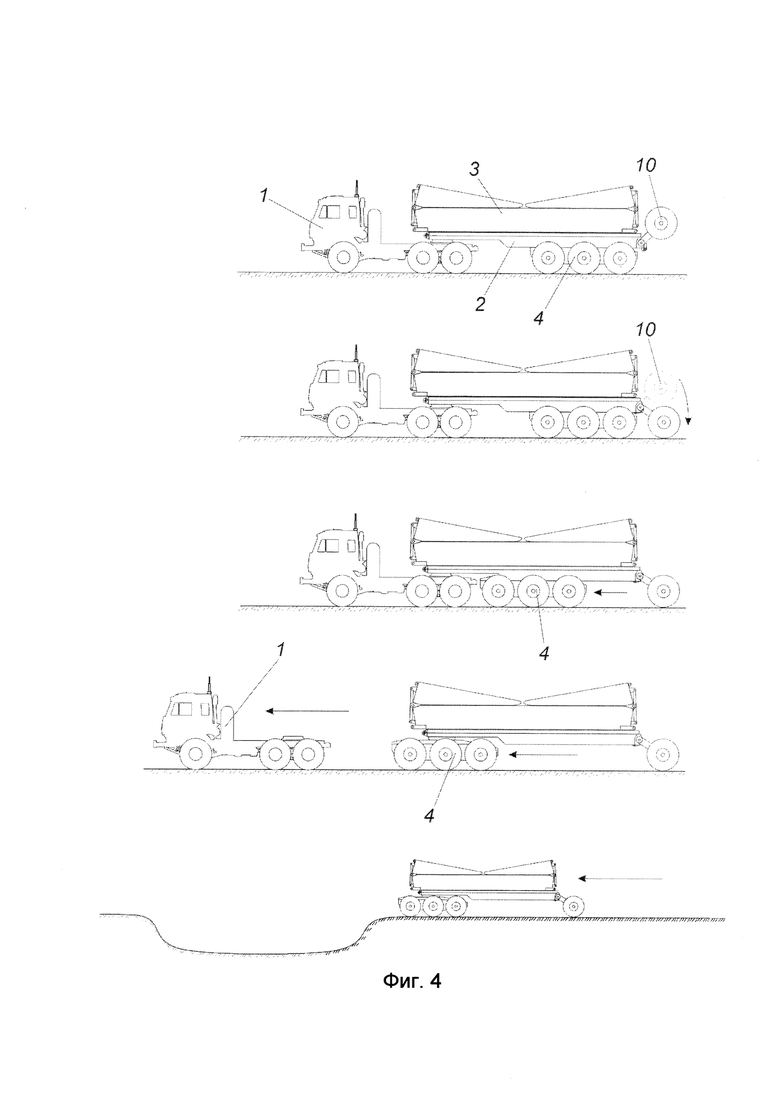
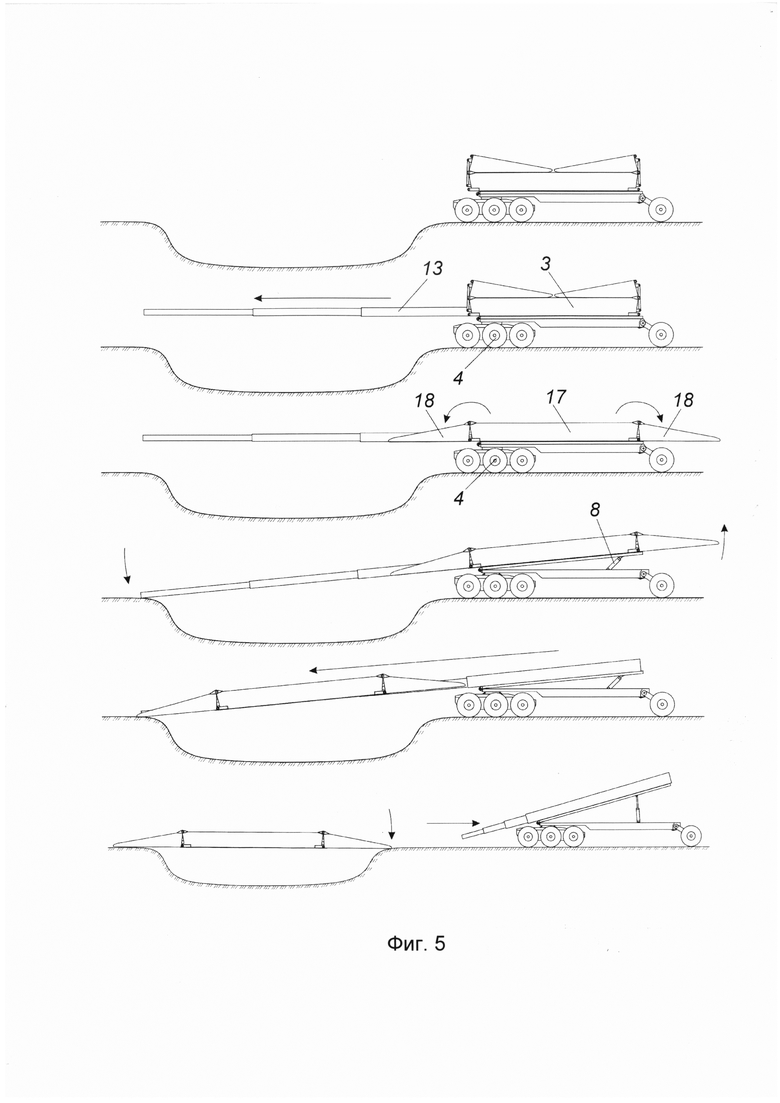
Сущность заявляемого способа установки мостового перехода поясняется чертежами, на которых изображено: на фиг. 1 - штурмовой мост в транспортном положении, вид сбоку; на фиг. 2 - штурмовой мост, переведенный в дистанционное управление, вид сбоку; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - последовательность перевода штурмового моста на дистанционное управление; на фиг. 5 - последовательность установки штурмового моста на препятствие.
Штурмовой мост с дистанционной установкой на препятствие включает автомобильный тягач 1 с аппаратурой дистанционного управления, установленной в кабине автомобиля, полуприцеп 2, мостовой блок 3, модуль для дистанционной транспортировки и установки 4 мостового блока 3, механизмы и системы установки мостового блока на преодолеваемую преграду.
Полуприцеп 2 состоит из верхней рамы 5 и нижней рамы 6, соединенных между собой в передней части шарнирными соединениями 7, а в задней части установлен гидроцилиндр 8, осуществляющий поворот верхней рамы 5 относительно нижней рамы 6. Полуприцеп 2 в передней части снабжен сцепным устройством 9 для соединения с автомобилем-тягачем, а в задней части полуприцепа нижняя рама 6 опирается на модуль для дистанционной транспортировки и установки 4 мостового блока 3, который в транспортном положении, до перевода штурмового моста на дистанционное управление, выполняет функцию колесной тележки полуприцепа 2. В транспортном положении модуль для дистанционной транспортировки и установки 4 мостового блока 3 жестко фиксируется относительно нижней рамы 6 с исключением возможности поворота относительно продольной оси полуприцепа 2 в горизонтальной плоскости. Нижняя рама 6 в задней части по ходу движения имеет также опорную колесную пару 10, перемещаемую в рабочее положение гидроцилиндром 11.
Дистанционно управляемый модуль 4, для транспортировки и установки мостового блока 3 имеет приемную аппаратуру для дистанционного радиоуправления с возможностью видеонаблюдения за процессом транспортировки и установки мостового блока 3 из кабины автомобиля-тягача 1, гидравлическую систему для привода, модуль 4 соединен с нижней рамой 6 с помощью соединительного устройства 12, на котором, в рабочем положении, при транспортировке мостового блока к месту установки, снимается фиксация, что позволяет модулю 4 поворачиваться в горизонтальной плоскости относительно полуприцепа 2. Соединительное устройство 12 модуля 4 также имеет соединительные узлы гидравлической системы для привода гидроцилиндров и других механизмов перевода мостового блока 3 в рабочее положение и установки его на преграду.
На верхней раме 5 полуприцепа 2 смонтирован механизм установки, состоящий из телескопической наводочной балки 13 и зубчатых колес 14, приводящихся в действие с помощью телескопического гидроцилиндра 15 и гидромоторов 16.
Мостовой блок 3 штурмового моста состоит из двух колей, расположенных симметрично относительно продольной оси, каждая из которой, состоит из одной средней секции 17 и двух крайних секций 18, соединенных между собой в транспортном положении посредством штырей и проушин 19, а в рабочем положении - дополнительными проушинами 20 и гидроштырями 21. Поворот крайних секций 18 относительно средней секции 17 осуществляется с помощью рычагов 22, которые одними концами посредством штырей и проушин 23, соединены с крайними секциями, а другими концами - со штоками гидроцилиндров 24, размещенных в средних секциях, привод гидроцилиндров 24 осуществляется от гидросистемы механизма установки. Для передвижения мостового блока 3 по верхней раме 5 в момент надвижки на преграду средние секции 17 опираются на накаточные ролики 25, размещенные, а в транспортном положении фиксируются с помощью стопорного устройства 26. Межколейные связи мостового блока 3 выполнены в виде трапецеидальных рам 27, жестко соединяющих колеи мостового блока между собой путем крепления к боковым стенкам средних 17 и крайних 18 секций колей мостового блока 3. Перемещение мостового блока 3 осуществляется посредством зубчатых реек 23, прикрепленных с двух сторон к нижней части трапецеидальных рам 22 и находящихся в зацеплении с зубчатыми колесами 14, установленных на верхней раме 5. Зубчатые колеса 14 приводится во вращение гидромоторами 16 от гидравлической системы модуля для дистанционной транспортировки и установки мостового блока 4. В развале каждой трапецеидальной рамы 27 жестко закреплены ролики 28, имеющие различный диаметр по длине, соответствующей изменяющейся ширине секций телескопической наводочной балки 13.
Установка мостового блока штурмового моста на преграду осуществляется следующим способом. Для возведения мостового перехода штурмовой мост перемещается на рубеж - не ближе 6 км от преграды, дополнительная опорная колесная пара 10 переводится в рабочее положение гидроцилиндром 11, модуль для дистанционной транспортировки и установки 4 мостового блока 3 максимально возможно переводят в переднее положение, ближе к автомобильному тягачу 1, затем отцепляют автомобильный тягач 1 и окончательно перемещают модуль 4 в переднее рабочее положение, снимают фиксацию поворота модуля 4 относительно горизонтальной плоскости полуприцепа 2 с помощью механизма 12. Дальнейшее управление штурмовым мостом осуществляют с помощью с помощью системы дистанционного управления, установленной в кабине автомобильного тягача 1. Штурмовой мост, переведенный в дистанционное управление, транспортируется к преграде с помощью модуля 4, останавливается на берегу преграды, затем телескопическая наводочная балка 13 с помощью телескопического гидроцилиндра 15 выдвигается в сторону противоположного берега преграды. После выдвижения наводочной балки 13, с помощью гидроцилиндров 24 и рычагов 22 поворачивают крайние секции колей 18 мостового блока на 180°, замыкают проушины 20 гидроштырями 21 и освобождают мостовой блок от фиксации средних секций 17 в транспортном положении механизмами стопорения 26. После перевода крайних секций 18 мостового блока 3 в рабочее положение, поворачивают верхнюю раму 5 с мостовым блоком относительно нижней рамы 6 с помощью гидроцилиндра 8 до опускания дальнего края телескопической наводочной балки 13 на противоположный берег. Затем посредством зубчатых колес 14, взаимодействующих с зубчатыми рейками 29, мостовой блок 3, опирающийся на накаточные ролики 25, установленные на верхней раме 5 и ролики 28, закрепленные на трапецеидальных рамах 27, надвигается по телескопической наводочной балке 13 до опирания передних концов крайних секций 18 мостового блока 3 на противоположный берег. После этого постепенно сдвигают телескопическую наводочную балку 13 обратно и опускают с ее помощью ближние крайние секции 18 мостового блока 3 на исходный берег. Демонтаж мостового блока 3 с преграды, укладку его на полуприцеп 2 и перевод штурмового моста в целом в транспортное положение выполняют в обратном порядке, демонтаж мостового блока 3 возможен с исходного и противоположного берега, т.е. с любого края мостового блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ МОСТОВОЙ КОМПЛЕКС | 2001 |
|
RU2212489C2 |
| УНИФИЦИРОВАННЫЙ МОСТОВОЙ КОМПЛЕКС | 2001 |
|
RU2212488C2 |
| МАШИНА ДЛЯ СБОРКИ И УСТАНОВКИ НАВОДОЧНОЙ БАЛКИ И БЛОКОВ МОСТА | 1994 |
|
RU2070248C1 |
| МОСТОВАЯ КОНСТРУКЦИЯ И МОСТОСБОРОЧНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ, СБОРКИ И УКЛАДКИ НА ПРЕГРАДУ МОСТОВОЙ КОНСТРУКЦИИ | 2001 |
|
RU2210656C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА КОЛЕСНОМ ШАССИ ДЛЯ ПЕРЕВОЗКИ МОСТОВОЙ КОНСТРУКЦИИ | 2002 |
|
RU2238859C2 |
| ФРОНТАЛЬНЫЙ ЭКРАН МОСТОУКЛАДЧИКА | 2016 |
|
RU2648651C1 |
| Мостоукладчик | 2021 |
|
RU2815802C2 |
| МОСТОУКЛАДЧИК НА ШАССИ БАЗОВОГО ТАНКА | 2003 |
|
RU2250284C1 |
| МОСТОУКЛАДЧИК НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2009 |
|
RU2392369C1 |
| КОНЦЕВАЯ СЕКЦИЯ НАВОДОЧНОЙ БАЛКИ С БЕРЕГОВОЙ ОПОРОЙ | 2019 |
|
RU2723423C1 |

Изобретение относится к средствам для оборудования временных мостовых переходов. Технический результат - исключение возможности поражения экипажа штурмового моста путем применения способа установки мостового перехода с применением дистанционно управляемого модуля с расстояния 6…7 км. Штурмовой мост размещают и транспортируют по автомобильным дорогам до рубежа перевода на дистанционное управление на полуприцепе, снабженном модулем для дистанционной транспортировки и установки мостового блока, и дополнительной опорной колесной парой в задней части полуприцепа. На рубеже перевода штурмового моста на дистанционное управление, который находится на расстоянии не ближе 6 км от переднего края позиций противника, модуль для дистанционной транспортировки и установки мостового блока перемещают из задней части полуприцепа в его переднюю часть. Затем транспортируют мостовой блок к преодолеваемой преграде посредством модуля для дистанционной транспортировки и установки мостового блока на преграду, дистанционно управляемого из кабины тягача, с последующей установкой мостового блока на преграду по телескопической наводочной балке, смонтированной на полуприцепе.5 ил.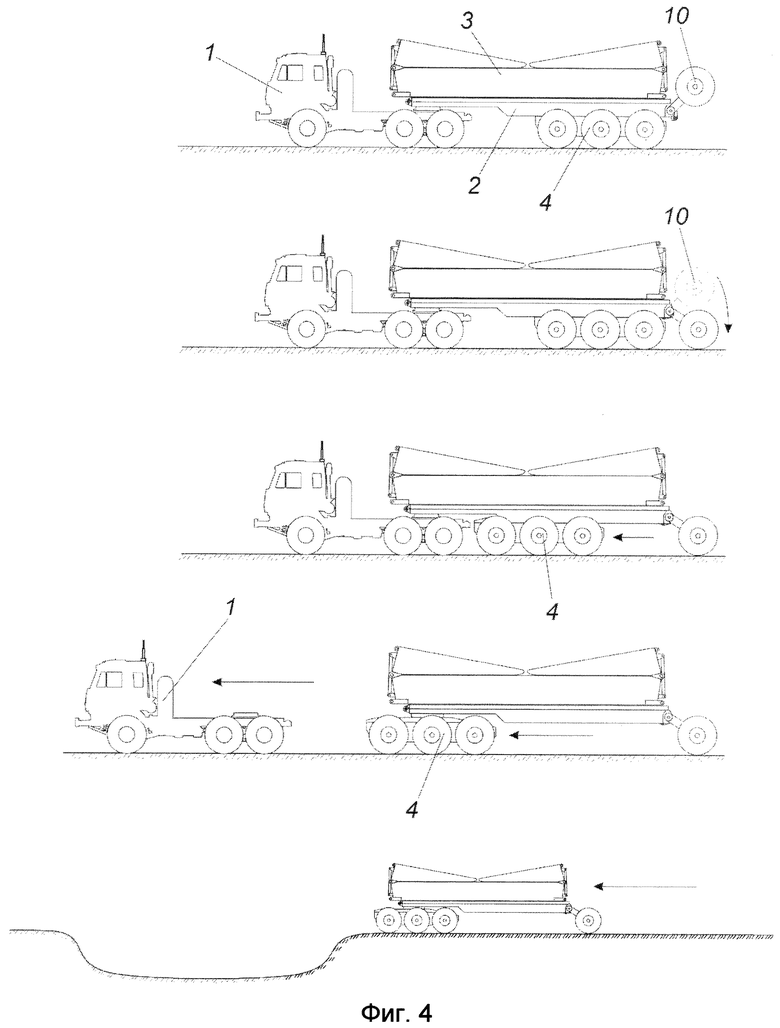
Способ установки мостового перехода на преодолеваемую преграду, заключающийся в том, что на полуприцепе, снабженном модулем для дистанционной транспортировки и установки мостового блока, и дополнительной опорной колесной парой в задней части полуприцепа, размещают мостовой блок, транспортируют полуприцеп с мостовым блоком автомобильным тягачом до рубежа перевода на дистанционное управление на расстояние не ближе 6 км от переднего края позиций противника, после чего модуль для дистанционной транспортировки и установки мостового блока перемещают из задней части полуприцепа в его переднюю часть, затем транспортируют мостовой блок к преодолеваемой преграде посредством модуля для дистанционной транспортировки и установки мостового блока, дистанционно управляемого из кабины тягача, с последующей установкой мостового блока на преграду по телескопической наводочной балке, смонтированной на полуприцепе.
| US 7784134 B2, 31.08.2010 | |||
| Устройство для автоматического включения резервного питания потребителей | 1988 |
|
SU1585863A1 |
| US 4972539 A1, 27.11.1990 | |||
| US 4602399 A1, 29.07.1986 | |||
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН | 2004 |
|
RU2281461C2 |
| DE 102004016974 A1, 03.11.2005 | |||
| СПОСОБ ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ СПИДА У ВИЧ-НОСИТЕЛЕЙ | 2015 |
|
RU2597805C1 |
| US 5167295 A1, 01.12.1992 | |||
| МОСТОУКЛАДЧИК (ВАРИАНТЫ) | 2015 |
|
RU2586657C1 |

