Изобретение относится к области сейсмометрии в нефтяной и газовой промышленности и может быть использовано в системах регистрации сейсмических данных, например, при проведении поверхностного мониторинга операции гидравлического разрыва пласта (ГРП), поиске залежей углеводородов, определении системы естественной трещиноватости.
В настоящее время при решении данных задач необходимо применение автономных широкополосных высокоточных сейсмических приемников, которые располагаются компактной группой.
Как правило, в сетях пассивного сейсмологического мониторинга в качестве сейсмических приемников применяют сейсмометры, позволяющие работать в частотном диапазоне от 0,5 Гц до 60 Гц.
Организация работающей малоапертурной группы в этом случае является экономически нецелесообразной в виду высокой стоимости автономных широкополосных сейсмических приемников и отсутствия готовых решений на их основе для обеспечения мониторинга в режиме реального времени.
Высокая стоимость таких сейсмических приемников, трудоемкость их установки, последующего обслуживания и охраны делают такие работы чрезвычайно затратными.
Вместе с тем сейсмоприемники на базе геофонов, дополненные соответствующими модулями усиления и корректировки амплитудно-частотных характеристик и фильтрации, могут быть использованы в современных цифровых системах регистрации сейсмических данных.
Подобные сейсмические приемники позволяют зарегистрировать сейсмические сигналы, ассоциирующиеся с залежью углеводородов, развитием трещины ГРП.
Методы увеличения частотного диапазона позволяют создать сейсмический приемник, покрывающий необходимый рабочий диапазон частот в области низких частот, при этом верхняя граница частотного диапазона может достигать до 1 кГц, что позволяет комплексировать методы пассивного и активного сейсмического мониторинга.
Использование таких сейсмических приемников позволит увеличить густоту локальных сейсмологических сетей благодаря снижению затрат на их обустройство и обслуживание.
Известны регистраторы сейсмических сигналов, в которых использованы измерительные первичные преобразователи (сейсмические приемники):
ZET 048-С производства ZETLAB
[https://zetlab.com/product-category/izmeritelno oborudovanie/seysmostantsii/];
Байкал-8 производства ООО «Р-сенсорс»
[http://r-sensors.ru/1_products/Descriptions/BY-8-RU.pdf],;
ДЕЛЬТА-03М производства ООО «Логические системы» [http://logsys.ru/index.php?page= 15].
Недостатками аналогов являются:
- использование первичных преобразователей с малыми уровнями выходного сигнала, вследствие малых коэффициентов усиления;
- невозможность сохранения приемлемого отношения сигнал/шум в случае дополнения вышеупомянутых устройств каскадом усиления со значительным коэффициентом усиления для использования первичных преобразователей с малым уровнем выходного сигнала;
- недостаточно высокое соотношение сигнал/шум при измерениях микросейсмических сигналов на частотах долей и первых герц, в частности для задач поиска углеводородов и слабых сигналов трещиноватой среды при ГРП.
Прототипом является устройство для коррекции частотной характеристики геофона, состоящее из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0 (патент RU 111689 U1, МПК G01V 1/00, дата публикации 20.12.2011).
Основным недостатком устройства-прототипа является недостаточное соотношение сигнал/шум, при этом, так как полосовой интегратор имеет постоянный коэффициент усиления в области частот 0 - ω1, а соотношение сигнал/шум в данной области частот меньше единицы, усиление сигнала в данной области частот приводит к усилению низкочастотного шума, причем значение резистора в цепи обратной связи полосового интегратора может достигать больших величин, порядка мегаома, что является дополнительным источником тепловых шумов.
Недостатками устройства-прототипа также являются:
- низкая помехозащищенность, так как используется несимметричный выходной сигнал;
- низкая надежность и мобильность работы устройства при полевом использовании, если геофон - электродинамический сейсмоприемник со значительной инерционной массой, который имеет низкую устойчивость к ударным и вибрационным нагрузкам, что приводит к низкой надежности совокупной измерительной системы;
- увеличенные массогабаритные характеристики и потребляемая мощность, если геофон - электрохимический (молекулярно-электронный) преобразователь механических величин, который имеет существенную зависимость от температуры внешней среды, что приводит к неконтролируемому ухудшению соотношения сигнал/шум в процессе измерений в полевых условиях, и требует применения термостатирования.
Таким образом, известные из уровня техники сейсмические приемники обладают недостатками, и требуется расширение их арсенала для удовлетворения потребностей производителей и потребителей систем регистрации сейсмических данных.
Техническая задача состоит в расширении арсенала сейсмических приемников путем создания сейсмического приемника - мобильного широкополосного устройства на базе геофонов, представляющего собой трехкоординатный сейсмоприемник в едином корпусе, обеспечивающего возможность его использования в различных эксплуатационных условиях.
Основным техническим результатом является обеспечение возможности регистрации слабых сейсмических сигналов в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1.
Техническим результатом также является повышение точности и достоверности регистрируемых микросейсмических сигналов за счет применения группирования геофонов, повышение помехозащищенности выходного сигнала за счет использования симметричного выходного сигнала.
Технический результат достигается тем, что, сейсмический приемник, согласно настоящему изобретению, содержит корпус, в котором расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z, при этом каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей, подключены к сумматору, соединенному через обратный фильтр, состоящему из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот с драйвером аналого-цифрового преобразователя, подключенным к источнику опорного напряжения и к выходному разъему, расположенному на лицевой панели корпуса.
А также тем, что на каждом геофоне установлен коэффициент демпфирования, равный единице при помощи, подключенного параллельно геофону, шунтирующего резистора Rd, номинал сопротивления которого определяется из соотношения

где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
А также тем, что каждый геофон содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу.
А также тем, что каждый инструментальный усилитель представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ.
А также тем, что сумматор представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе сумматора определяется из соотношения:

где Vl, V2,… VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
А также тем, что передаточная характеристика в полосе частот ω0 - ω1 первого полосового интегратора определяется из соотношения:
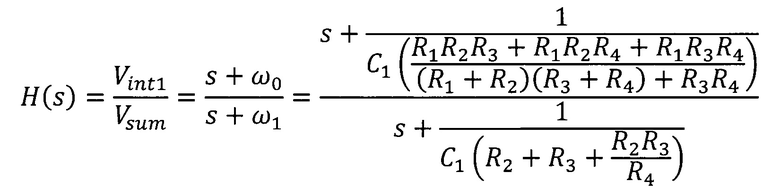
где Vint1 - выходной сигнал первого полосового интегратора; Vsum - выходной сигнал с сумматора, а передаточная характеристика в полосе частот ω0 - ω1 второго полосового интегратора определяется из соотношения:

где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
А также тем, что фильтр высоких частот представляет собой два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, при этом передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения

где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения:

где Vhpƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhvƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
А также тем, что драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный.
На фигурах 1, 2, 3 и 4 представлены, соответственно, укрупненная блок-схема предлагаемого сейсмического приемника, функциональные блок-схемы блоков ПМС, ортогонально ориентированных в направлениях X, Y, Z соответственно.
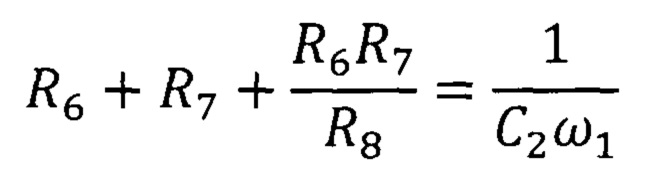
На фигуре 5 представлена электрическая схема каждого блока ПМС, включающая в себя N геофонов, которые через соответствующие N инструментальные усилители подключены к сумматору.
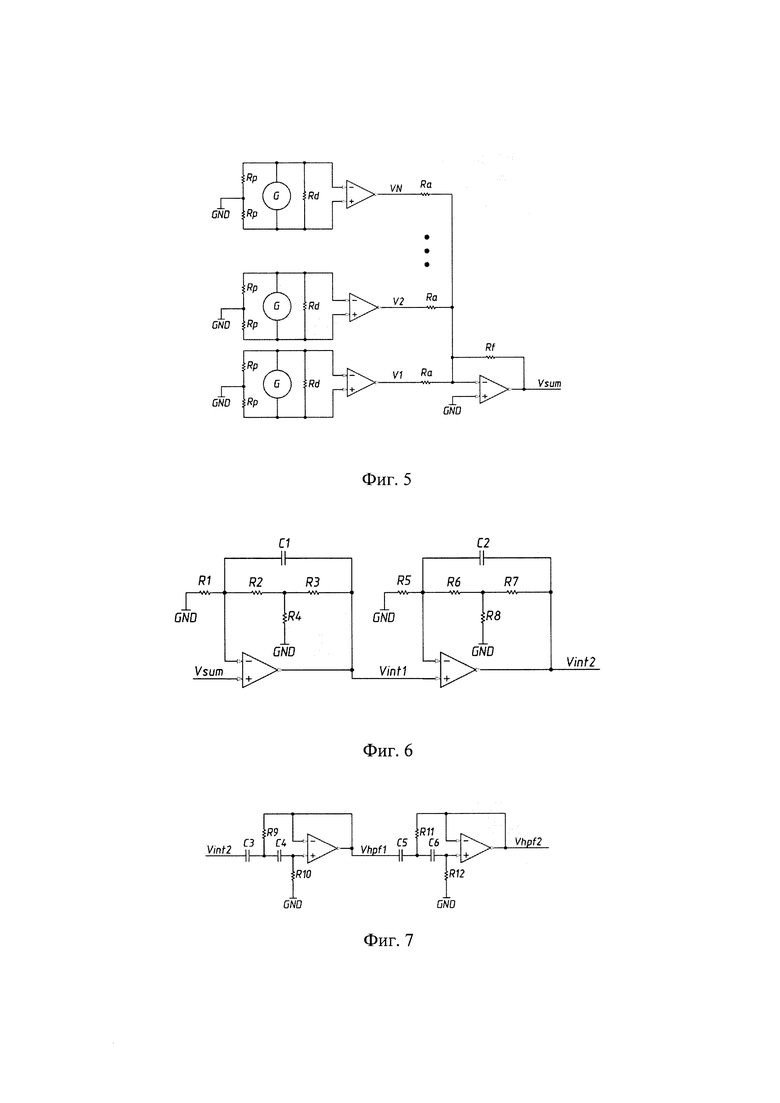
На фигуре 6 представлена электрическая схема обратного фильтра каждого блока ПМС.
На фигуре 7 представлена электрическая схема фильтра высоких частот каждого блока ПМС.
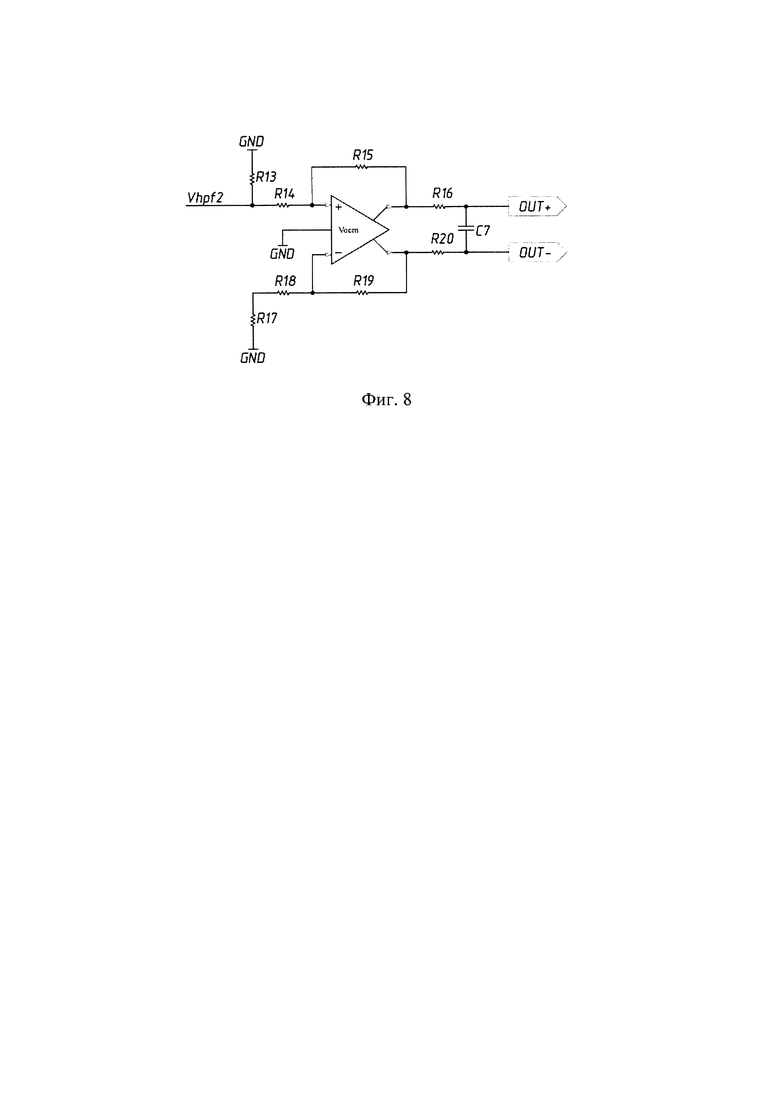
На фигуре 8 представлена электрическая схема драйвера аналого-цифрового преобразователя каждого блока ПМС.
Сейсмический приемник (фиг. 1) содержит корпус 1, в котором расположены три блока ПМС 2, 3 и 4, ортогонально ориентированных в направлениях X, Y, Z соответственно, выходные сигналы которых подключены к выходному разъему 5, расположенному на лицевой панели корпуса 1.
Блок 2 сейсмоприемника (Х-канал) включает в себя N геофонов 6 (61, 62…6N), которые через соответствующие инструментальные усилители 7 (71, 72…7N), сумматор 8, обратный фильтр 9, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 10 высоких частот соединены с драйвером 11 аналого-цифрового преобразователя, подключенному к источнику 12 опорного напряжения и к выходному разъему 5.
Блок 3 сейсмоприемника (Y -канал) включает в себя N геофонов 13 (131, 132…13N), которые через соответствующие инструментальные усилители 14 (141, 142…14N), сумматор 15, обратный фильтр 16, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 17 высоких частот соединены с драйвером 18 аналого-цифрового преобразователя, подключенному к источнику 19 опорного напряжения и к выходному разъему 5.
Блок 4 сейсмоприемника (Z -канал) включает в себя N геофонов 20 (201, 202…20N), которые через соответствующие инструментальные усилители 21 (211, 212…21N), сумматор 22, обратный фильтр 23, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 24 высоких частот соединены с драйвером 25 аналого-цифрового преобразователя, подключенному к источнику 26 опорного напряжения и к выходному разъему 5.
Таким образом, микросейсмические сигналы, регистрируемые геофонами (61, 62…6N,), (131, 132…13N,) и (201, 202…20N) с каждого ортогонального направления, X, Y, Z соответственно, преобразуются в аналоговые электрические сигналы.
Пример конкретного выполнения и работы сейсмического приемника.
Разработанный сейсмический приемник является мобильным широкополосным устройством на базе геофонов GS-ONE LF с собственной частотой 4,5 Гц (URL: https://geospace-ufa.ru/products/geofonybez-korpusov/gs-one-1f/:[сайт]) и представляет собой трехкоординатный сейсмоприемник в едином корпусе.
Сейсмический приемник содержит, в каждом блоке ПМС 2, 3, 4, платы из соответствующих инструментальных усилителей (71, 72…7N), (141, 142…14N), (211, 212…21N), соответствующих сумматоров 8, 15, 22 и соответствующие схемы корректировки амплитудно-частотной характеристики каждого геофона (61, 62…6N,), (131, 132…13N,), (201, 202…20N).
Поскольку чувствительность одного геофона GS-ONE LF (89,4 В/м/с) является недостаточной в системах регистрации сейсмических данных, на каждое ортогональное направление (X, Y, Z) установлено N геофонов: (61, 62…6N,), (131, 132…13N,), (201, 202…20N), сигналы с которых, проходя через соответствующие инструментальные усилители (71, 72…7N), (141, 142…14N), (211, 212…21N), суммируются с необходимым коэффициентом усиления при помощи соответствующих сумматоров 8, 15, 22, в результате чего общая чувствительность сейсмического приемника достигает величины порядка 2000 В/м/с, что сопоставимо с широкополосными цифровыми сейсмометрами, используемыми в сетях сейсмологического наблюдения.
На каждом геофоне (61, 62…6N,), (131, 132…13N,) и (201, 202…20N) установлен коэффициент демпфирования, равный единице, при помощи, подключенного параллельно геофону, шунтирующего резистора Rd, номинал сопротивления которого определяется из соотношения
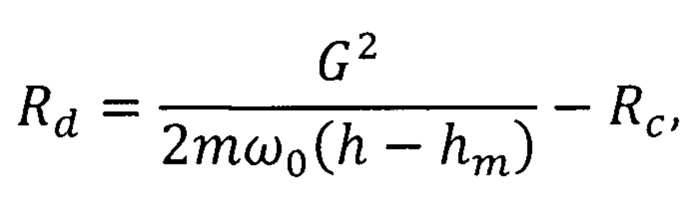
где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи (см. фиг. 5).
Каждый геофон (61, 62…6N,), (131, 132…13N,) и (201, 202…20N) содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу (см. фиг. 5).
Каждый инструментальный усилитель (71, 72…7N), (141, 142…14N), (211, 212…21N) представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ (см. фиг. 5).
Выходной дифференциальный сигнал каждого геофона (61, 62…6N,), (131, 132…13N,) и (201, 202…20N) поступает на соответствующий инструментальный усилитель (71, 72…7N), (141, 142…14N), (211, 212…21N), который преобразует симметричный сигнал в несимметричный.
Выходной сигнал каждого инструментального усилителя (71, 72…7N), (141, 142…14N), (211, 212…21N) поступает на соответствующий сумматор 8, 15, 22, который производит суммирование всех сигналов от N геофонов (71, 72…7N), (141, 142…14N), (211, 212…21N).
Данное суммирование приводит к уменьшению шума в выходном сигнале и увеличивает соотношение сигнал/шум в 
Каждый сумматор 8, 15, 22 представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе каждого сумматора 8, 15, 22 определяется из соотношения:

где V1, V2,…VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала (см. фиг. 5).
Основным ограничением аппаратной корректировки частотной характеристики геофона является наличие аппаратного шума, прежде всего шума операционных усилителей.
В качестве операционных усилителей, входящих в состав сумматоров 8, 15, 22, обратных фильтров 9, 16, 23 выбраны малошумящие прецизионные операционные усилители ОРА2211 от компании Texas Instruments со спектральной плотностью мощности шума 1,1 нВ/Гц.
Данные усилители имеют сверхнизкие значения температурного дрейфа и низкое электропотребление, что является преимуществом при применении в автономных системах сейсмологического мониторинга.
Для восстановления амплитудно-частотной характеристики каждого геофона (61, 62…6N,), (131, 132…13N,) и (201, 202…20N) в диапазоне частот от ω1 до ω0, где ω0 собственная частота геофона, а ω1 нижняя частота коррекции амплитудно-частотной характеристики геофона использована схема коррекции на основе обратного фильтра.
Выходной сигнал с каждого сумматора 8, 15, 22 поступает на соответствующий обратный фильтр 9, 16, 23, каждый из которых представляет собой два последовательно соединенных интегратора с крутизной частотной характеристики 12 дБ/октаву (крутизна частотной характеристики каждого интегратора 6 дБ/октаву) в полосе частот ω0 - ω1.
Реализация каждого обратного фильтра 9, 16, 23 на базе двух последовательно соединенных интеграторов представлена на фиг. 6.
Передаточная характеристика первого полосового интегратора определяется из соотношения:
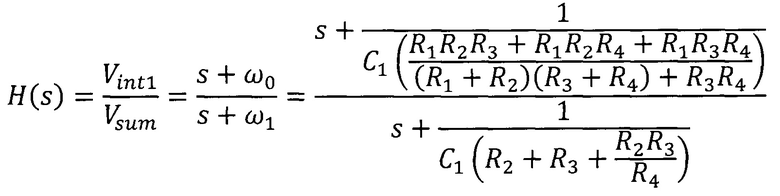
где Vint1 - выходной сигнал первого полосового интегратора; Vsum - выходной сигнал с сумматора.
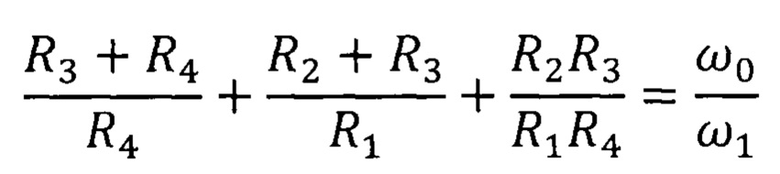
По заданным значениям С1,R2,R3 можно определить номиналы сопротивления R1 и R4 при помощи следующих уравнений:

Передаточная характеристика второго полосового интегратора определяется из соотношения:
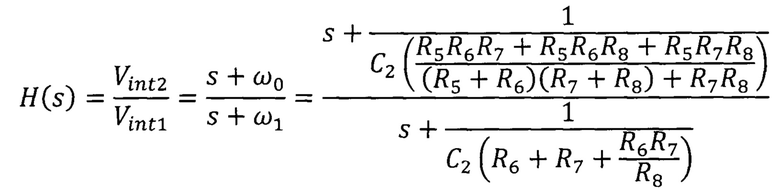
где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 -выходной сигнал с первого полосового интегратора.
По заданным значениям С2,R6,R7 можно определить номиналы сопротивления R5 и RQ при помощи следующих уравнений:

Соответственно два последовательно включенных интегратора формируют передаточную характеристику:

Для расширения частотного диапазона геофона GS-ONE LF в области 0,5-4,5 Гц, использована схема коррекции на основе обратного фильтра. Обратные фильтры 9, 16, 23 имеют усиление 12 дБ на октаву в полосе частот 0,5-4,5 Гц.
Для того, чтобы обеспечить устойчивый режим работы схемы коррекции и подавления низкочастотного шума, который усиливается при прохождении обратного фильтра в полосе частот ниже частоты корректировки ω1 (в области частот ниже 0,5 Гц) были применены, в качестве фильтров 10, 17, 24 высоких частот, два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, которые подавляют все частоты ниже 0,5 Гц.
Реализация каждого фильтра 10, 17, 24 высоких частот на базе двух последовательно соединенных фильтров высоких частот Баттерворта 2-го порядка представлена на фиг. 7.
Передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения:

где Vint2 - выходной сигнал со второго полосового интегратора; Vhрƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
Передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения:

где Vhрƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка; Vhрƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
Для передачи аналогового сигнала в тракт аналого-цифровых преобразователей выходной сигнал с каждого фильтра 10, 17, 24 высоких частот подключен к соответствующему драйверу 11, 18, 25 аналого-цифрового преобразователя, в качестве которых выбраны прецизионные драйверы LMP8350 со сверхнизкими искажениями, которые преобразовывают несимметричный сигнал в симметричный.
Реализация каждого драйвера 11, 18, 25 аналого-цифрового преобразователя представлена на фиг. 8.
Таким образом, содержащиеся, в каждом блоке ПМС 2, 3, 4, платы из соответствующих инструментальных усилителей (71, 72…7N), (141, 142…14N), (211, 212…21N), соответствующих сумматоров 8, 15, 22 и соответствующие схемы корректировки амплитудно-частотной характеристики каждого геофона GS-ONE LF (61, 62…6N,), (131, 132…13N,) и (201, 202…20N), позволяют расширить рабочий частотный диапазон геофонов GS-ONE LF в сторону низких частот с первоначальной 4,5 Гц до 0,5 Гц.
Точность измерения аналого-цифрового преобразователя, а также его температурная стабильность зависит в значительной степени от точности и стабильности источника опорного напряжения. Точность преобразования при проведении абсолютных измерений определяется точностью опорного сигнала. Однако в задачах сейсмологического мониторинга главным показателем является не абсолютная точность, а стабильность и повторяемость результатов измерения с малым уровнем вносимого аппаратного шума. Поэтому в качестве источников 12, 19, 26 опорного напряжения выбрана микросхема ADR02, которая имеет выходное напряжение 5 В, значение шума 10 мкВ в полосе частот 0,1-10 Гц и температурную стабильность 3 ррm/С.
Таким образом, выполнение сейсмического приемника в соответствии с предложенным техническим решением, позволяет регистрировать слабые сейсмические сигналы в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1, позволяет повысить точность и достоверность регистрируемых микросейсмических сигналов за счет применения группирования геофонов, повысить помехозащищенность выходного сигнала за счет использования симметричного выходного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СЕЙСМОМЕТР | 2022 |
|
RU2799344C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА РАЗРАБОТКИ НЕФТЯНЫХ И ГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2022 |
|
RU2799398C1 |
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2012 |
|
RU2531562C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ ПРИ РАЗНЕСЕННОМ ПРИЕМЕ | 1992 |
|
RU2031544C1 |
| СПОСОБ РАБОТЫ КОРИОЛИСОВА ГИРОСКОПА И ЭЛЕКТРОННЫЙ БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2328701C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ ПРИ РАЗНЕСЕННОМ ПРИЕМЕ | 1999 |
|
RU2168272C2 |


Изобретение может быть использовано в системах регистрации сейсмических данных. Сейсмический приемник содержит корпус, в котором расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z. Каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей подключены к сумматору, соединенному через обратный фильтр, состоящему из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот с драйвером аналого-цифрового преобразователя, подключенным к источнику опорного напряжения и к выходному разъему, расположенному на лицевой панели корпуса. На каждом геофоне установлен коэффициент демпфирования, равный единице, при помощи подключенного параллельно геофону, шунтирующего резистора Rd. Каждый геофон содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу. Каждый инструментальный усилитель представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ. Сумматор представляет собой аналоговый сумматор на операционном усилителе. Фильтр высоких частот представляет собой два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка. Драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный. Технический результат - обеспечение возможности регистрации слабых сейсмических сигналов в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1. 7 з.п. ф-лы, 8 ил.
1. Сейсмический приемник, характеризующийся тем, что содержит корпус, в котором расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z, при этом каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей подключены к сумматору, соединенному через обратный фильтр, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот с драйвером аналого-цифрового преобразователя, подключенным к источнику опорного напряжения и к выходному разъему, расположенному на лицевой панели корпуса.
2. Сейсмический приемник по п. 1, отличающийся тем, что на каждом геофоне установлен коэффициент демпфирования, равный единице, при помощи подключенного параллельно геофону шунтирующего резистора Rd, номинал сопротивления которого рассчитывается из соотношения  где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
3. Сейсмический приемник по п. 1, отличающийся тем, что каждый геофон содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу.
4. Сейсмический приемник по п. 1, отличающийся тем, что каждый инструментальный усилитель представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ.
5. Сейсмический приемник по п. 1, отличающийся тем, что сумматор представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе сумматора определяется из соотношения:  где V1,V2,…VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
где V1,V2,…VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
6. Сейсмический приемник по п. 1, отличающийся тем, что передаточная характеристика первого полосового интегратора определяется из соотношения
 где Vint1 - выходной сигнал первого полосового интегратора, Vsum - выходной сигнал с сумматора, а передаточная характеристика второго полосового интегратора определяется из соотношения
где Vint1 - выходной сигнал первого полосового интегратора, Vsum - выходной сигнал с сумматора, а передаточная характеристика второго полосового интегратора определяется из соотношения
 где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
7. Сейсмический приемник по п. 1, отличающийся тем, что фильтр высоких частот представляет собой два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, при этом передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
 где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
 где Vhpƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
где Vhpƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
8. Сейсмический приемник по п. 1, отличающийся тем, что драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный.
| 0 |
|
SU111689A1 | |
| Устройство для виброакустического контроля состояния породного массива | 1983 |
|
SU1133568A1 |
| US 6370083 B1 09.04.2002 | |||
| DE 2920420 A 20.11.1980 | |||
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ИЛЛЮЗИИ ПЕРЕОЦЕИКИ ВЕРТИКАЛИ | 0 |
|
SU171967A1 |
| Трехкомпонентный скважинный сейсмометр | 2019 |
|
RU2717166C1 |

