Изобретение относится к области сейсмометрии в нефтяной и газовой промышленности и может быть использовано в системах регистрации сейсмических данных, например, при проведении поверхностного мониторинга операции гидравлического разрыва пласта (ГРП), поиске залежей углеводородов, определении системы естественной трещиноватости.
В настоящее время при решении данных задач необходимо применение автономных широкополосных высокоточных цифровых сейсмометров, которые располагаются компактной группой.
Как правило, в сетях пассивного сейсмологического мониторинга в качестве сейсмических датчиков применяют сейсмометры, позволяющие работать в частотном диапазоне от 0.5 Гц до 60 Гц.
Организация работающей малоапертурной группы в этом случае является экономически нецелесообразной в виду высокой стоимости автономных широкополосных цифровых сейсмометров и отсутствия готовых решений на их основе для обеспечения мониторинга в режиме реального времени.
Высокая стоимость таких сейсмометров, трудоемкость их установки, последующего обслуживания и охраны делают такие работы чрезвычайно затратными.
Вместе с тем сейсмоприемники на базе геофонов, дополненные соответствующими модулями усиления и корректировки амплитудно-частотных характеристик и фильтрации, могут быть использованы в современных цифровых системах регистрации сейсмических данных.
Подобные цифровые сейсмометры позволяют зарегистрировать сейсмические сигналы, ассоциирующиеся с залежью углеводородов, развитием трещины ГРП.
Методы увеличения частотного диапазона позволяют создать сейсмический датчик, покрывающий необходимый рабочий диапазон частот в области низких частот, при этом верхняя граница частотного достигает до 1 кГц, что позволяет комплексировать методы пассивного и активного сейсмического мониторинга.
Использование таких датчиков позволит увеличить густоту локальных сейсмологических сетей благодаря снижению затрат на их обустройство и обслуживание.
Прототипом является малошумящий регистратор низкочастотного аналогового сигнала, который содержит, по меньшей мере, микроконтроллер основной, микроконтроллер вспомогательный, усилитель регистрируемого сигнала, схему согласования и фильтрации, аналогово-цифровой преобразователь, формирователь тактовых частот, GPS/ГЛОНАСС приемник, карту памяти, приемопередатчик RS485, модуль беспроводной связи и схему питания, причем схема питания выполнена с возможностью подключения к аккумуляторной батарее, а приемопередатчик выполнен с возможностью подключения к проводной линии связи, входы усилителя выполнены с возможностью подключения к источникам регистрируемого сигнала, выходы усилителя подключены к входам схемы согласования и фильтрации, выходы которого подключены к аналогово-цифровому преобразователю, входы/выходы которого подключены к выходам/входам микропроцессора основного, к входу которого подключен формирователь тактовых частот, выход/вход GPS/ГЛОНАСС приемника подключены к входу/выходу микропроцессора основного, также к входам/выходам микропроцессора основного подключены выходы/входы системы питания, приемопередатчика и карты памяти, выход микропроцессора основного подключен к входу микропроцессора вспомогательного, вход/выход приемопередатчика подсоединен к выходу/входу модуля беспроводной связи, при этом все энергопотребляющие блоки и узлы подключены к системе питания (патент RU 2685067, МПК G01V 1/48, дата публикации 16.04.2019).
В описании устройства-прототипа указаны известные цифровые сейсмометры - регистраторы сейсмических сигналов и их недостатки:
ZET 048-С производства ZETLAB
[https://zetlab.com/product-category/izmeritelno oborudovanie/seysmostantsii/];
Байкал-8 производства ООО «Р-сенсорс»
[http://r-sensors.ru/1_products/Descriptions/BY-8-RU.pdf],;
ДЕЛЬТА-03М производства ООО «Логические системы» [http://logsys.ru/index.php?page=15].
Недостатками аналогов являются:
- необходимость использования первичных преобразователей различных типов с достаточно большим уровнем выходного сигнала, которые в случае электродинамических сейсмоприемников со значительной инерционной массой имеют низкую стойкость к ударным и вибрационным нагрузкам, что обусловливает низкую надежность совокупной измерительной системы, а в случае электрохимических (молекулярно-электронных) преобразователей механических величин существенно зависимы от температуры внешней среды, что приводит к неконтролируемому ухудшению соотношения сигнал/шум в процессе измерений в полевых условиях, и требует применения термостатирования, что увеличивает массогабариты и потребляемую мощность;
- невозможность использования первичных преобразователей с малыми уровнями выходного сигнала, вследствие малых коэффициентов усиления;
- невозможность сохранения приемлемого отношения сигнал/шум в случае дополнения вышеупомянутых устройств каскадом усиления со значительным коэффициентом усиления для использования первичных преобразователей с малым уровнем выходного сигнала.
- недостаточно высокое соотношение сигнал/шум при измерениях микросейсмических сигналов на частотах долей и первых герц, в частности для задач поиска углеводородов и слабых сигналов трещиноватой среды при ГРП.
Недостатками устройства-прототипа являются:
- применение одного аналого-цифрового преобразователя для оцифровки сейсмических сигналов с N сейсмоприемников не позволяет корректно определять поляризацию регистрируемой сейсмической волны, что в свою очередь значительно ухудшает точность и достоверность определения направления прихода сейсмической волны и приводит к ошибкам определения координат гипоцентров сейсмических событий;
- блочная структура оборудования, когда сейсмоприемник и регистратор сейсмических сигналов представляют собой отдельные приборы, конструктивно выполненные в отдельных корпусах, приводит к ухудшению характеристик надежности и мобильности работы автономного устройства при полевом использовании и транспортировке.
Таким образом, известные из уровня техники цифровые сейсмометры обладают недостатками, и требуется расширение их арсенала для удовлетворения потребностей производителей и потребителей систем регистрации сейсмических данных.
Техническая задача состоит в расширении арсенала цифровых сейсмометров путем создания цифрового сейсмометра - мобильного автономного широкополосного устройства на базе геофонов, представляющего собой трехкоординатный сейсмоприемник и регистратор сейсмических сигналов в едином корпусе, обеспечивающего возможность его использования в различных эксплуатационных условиях.
Основным техническим результатом является повышение точности и достоверности определения направления прихода сейсмической волны и снижение ошибок определения координат гипоцентров сейсмических событий.
Техническим результатом также является повышение надежности и мобильности работы автономного устройства при полевом использовании и транспортировке, обеспечение возможности регистрации слабых сейсмических сигналов в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1, повышение точности и достоверности регистрируемых микросейсмических сигналов за счет применения группирования геофонов, повышение помехозащищенности выходного сигнала за счет использования симметричного выходного сигнала.
Технический результат достигается тем, что цифровой сейсмометр, согласно настоящему изобретению, включает в себя последовательно соединенные сейсмоприемник, блок управления и регистрации микросейсмических сигналов, блок процессорный, размещенные в едином корпусе, причем в сейсмоприемнике расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z, при этом каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей, подключены к сумматору, соединенному через обратный фильтр, состоящему из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот с драйвером аналого-цифрового преобразователя (АЦП), подключенным к источнику опорного напряжения, блок управления и регистрации микросейсмических сигналов содержит блок АЦП, подключенный к блоку опорного напряжения, причем блок АЦП содержит три микросхемы АЦП, каждая из которых принимает аналоговый сигнал от соответствующих геофонов и через цифровой изолятор шин данных (ЦИШД) и мультиплексор соединена с микроконтроллером управления, подключенным к ЦИШД, GPS/ГЛОНАСС приемнику, соединенному с активной антенной, и генератору тактовых сигналов, а блок процессорный представляет собой одноплатный компьютер, соединенный с микроконтроллером блока управления и регистрации микросейсмических сигналов управления, причем одноплатный компьютер имеет карту памяти, порты USB, модуль Bluetooth, модуль Wi-Fi и разъем RJ-45 сетевого приемопередатчика Gigabit Ethernet, при этом на лицевой панели корпуса размещены активная GPS/ГЛОНАСС антенна, порты USB, разъем RJ-45, разъем для подключения источника питания и пузырьковый уровень горизонта, а также светодиоды для индикации режима работы цифрового сейсмометра и кнопка Старт/Стоп, подключенные к микроконтроллеру управления, причем фильтр высоких частот представляет собой два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, при этом передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения

где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения%

где Vhpƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный.
А также тем, что на каждом геофоне установлен коэффициент демпфирования, равный единице при помощи, подключенного параллельно геофону, шунтирующего резистора Rd, номинал сопротивления которого определяется из соотношения
где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
А также тем, что каждый геофон содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу.
А также тем, что каждый инструментальный усилитель представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ.
А также тем, что сумматор представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе сумматора определяется из соотношения:

где V1, V2, … VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
А также тем, что передаточная характеристика первого полосового интегратора определяется из соотношения:
где Vint1 - выходной сигнал первого полосового интегратора; Vsum - выходной сигнал с сумматора, а передаточная характеристика второго полосового интегратора определяется из соотношения:
где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
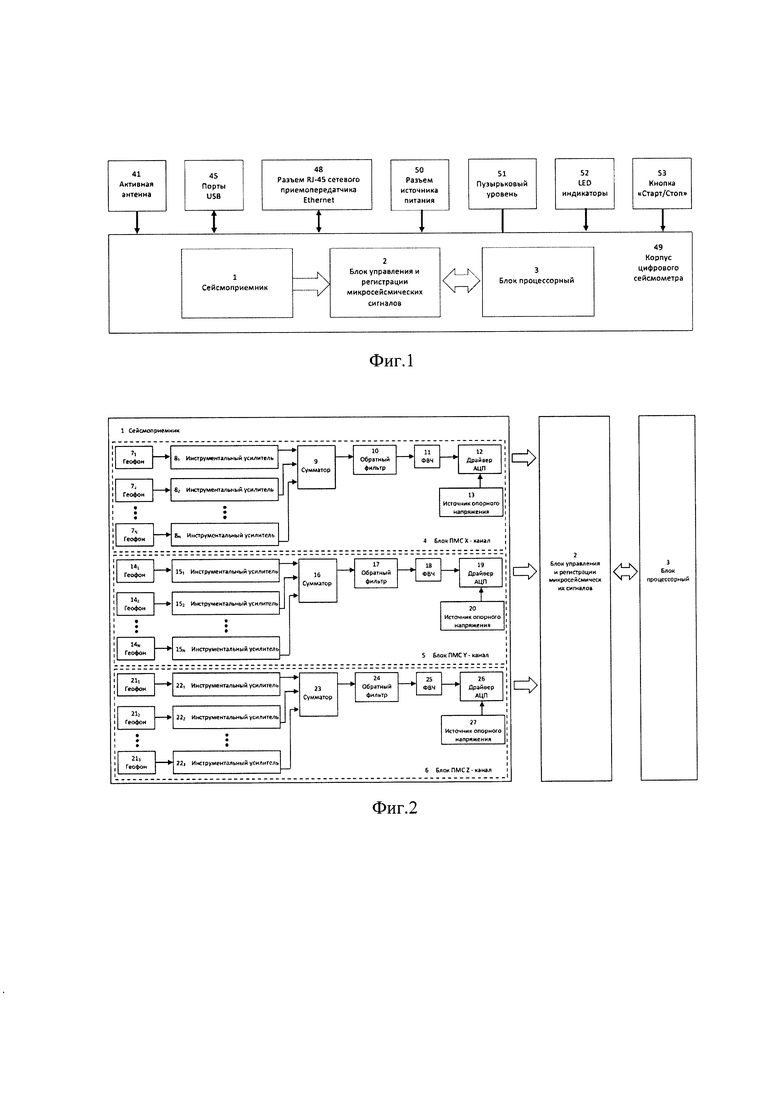
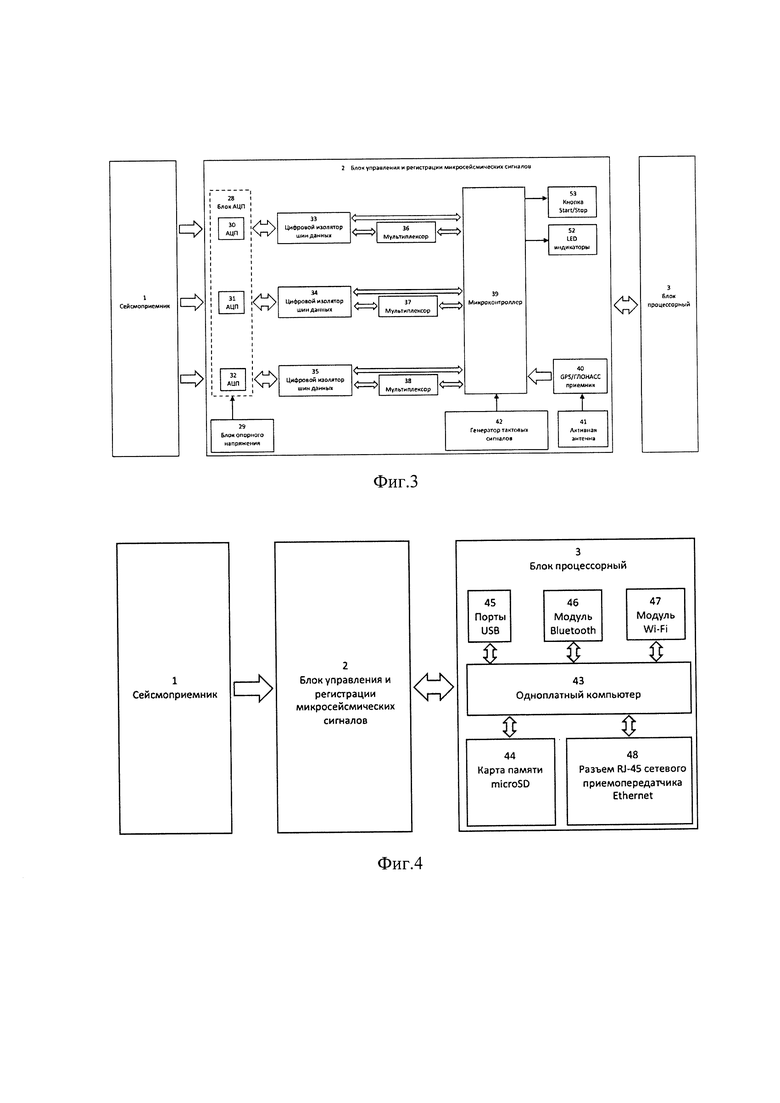
На фигурах 1, 2, 3 и 4 представлены, соответственно, функциональные схемы цифрового сейсмометра, сейсмоприемника с тремя расположенными в нем блоками ПМС, блока управления и регистрации микросейсмических сигналов, блока процессорного.
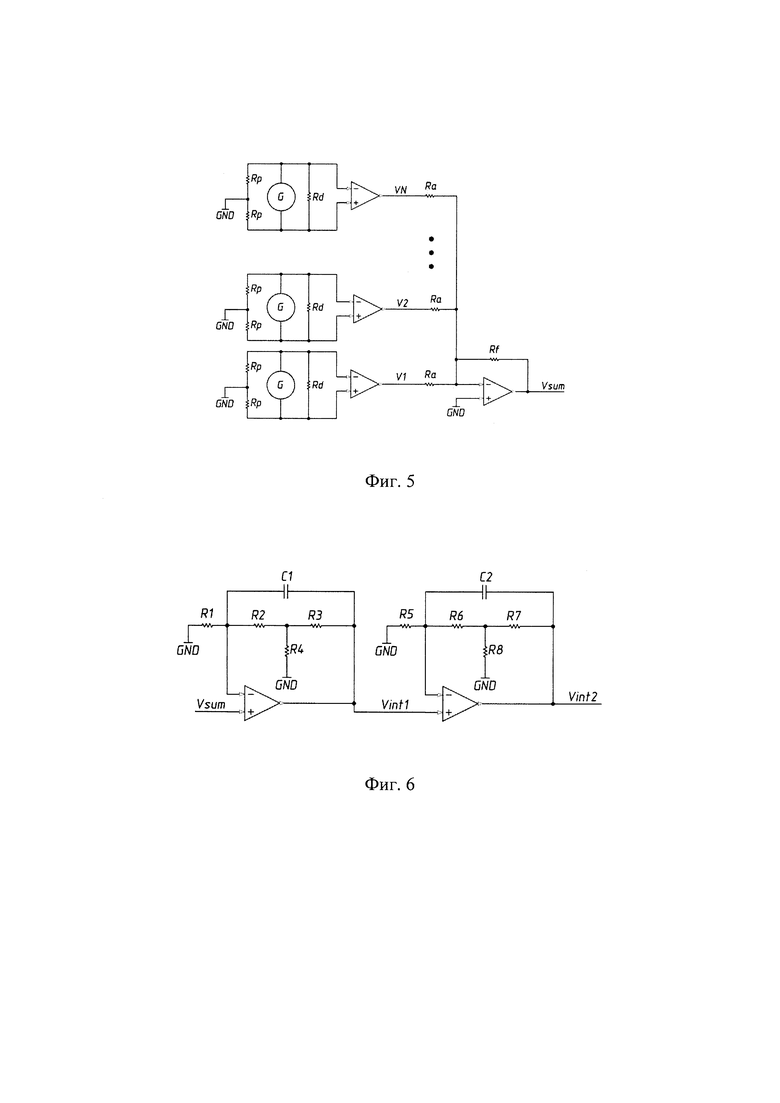
На фигуре 5 представлена электрическая схема каждого блока ПМС, включающая в себя N геофонов, которые через соответствующие N инструментальные усилители подключены к сумматору.
На фигуре 6 представлена электрическая схема обратного фильтра каждого блока ПМС.
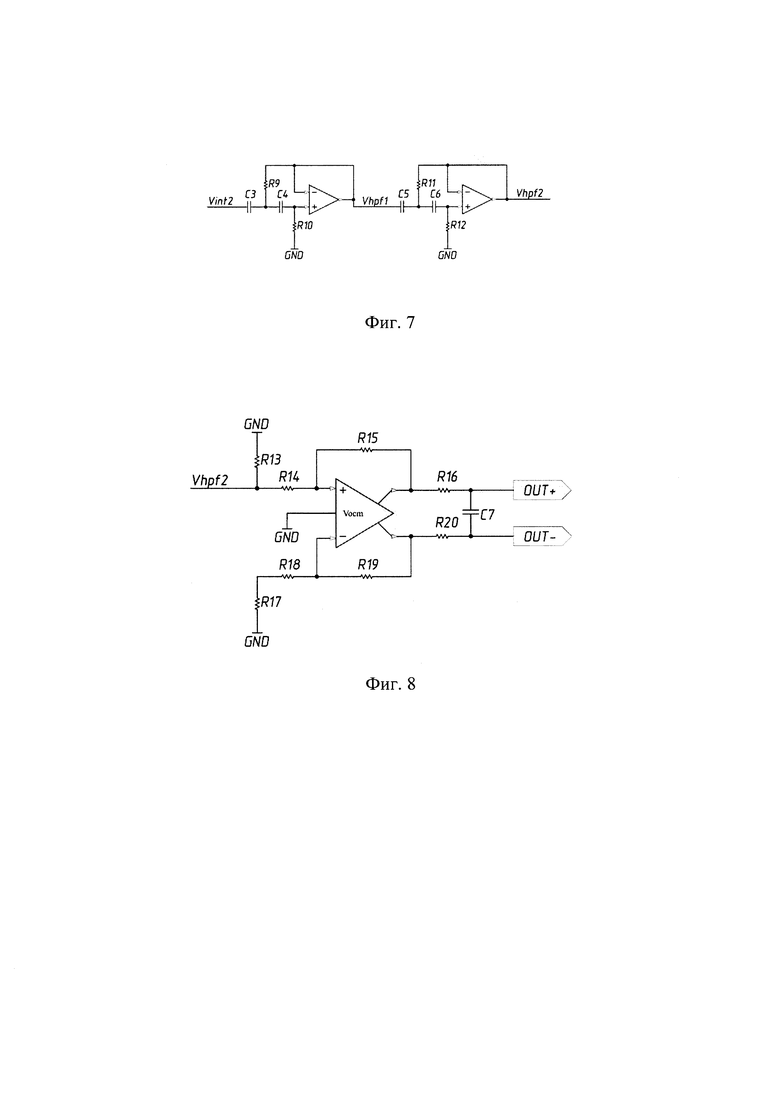
На фигуре 7 представлена электрическая схема фильтра высоких частот каждого блока ПМС.
На фигуре 8 представлена электрическая схема драйвера аналого-цифрового преобразователя каждого блока ПМС.
Цифровой сейсмометр (см. фиг. 1) включает в себя последовательно соединенные сейсмоприемник 1, блок 2 управления и регистрации микросейсмических сигналов и блок 3 процессорный, размещенные в едином корпусе 49.
Сейсмоприемник 1 содержит три расположенных в нем блока ПМС 4, 5 и 6, ортогонально ориентированных в направлениях, соответственно, X, Y и Z (см. фиг. 2).
Блок 4 сейсмоприемника 1 (Х-канал) включает в себя N геофонов 7 (71, 72…7N), которые через соответствующие инструментальные усилители 8 (81, 82…8N), сумматор 9, обратный фильтр 10, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 11 высоких частот соединены с драйвером 12 аналого-цифрового преобразователя, подключенному к источнику 13 опорного напряжения (см. фиг. 2).
Блок 5 сейсмоприемника 1 (Y -канал) включает в себя N геофонов 14 (141, 142…14N), которые через соответствующие инструментальные усилители 15 (151, 152…15N), сумматор 16, обратный фильтр 17, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 18 высоких частот соединены с драйвером 19 аналого-цифрового преобразователя, подключенному к источнику 20 опорного напряжения (см. фиг. 2).
Блок 6 сейсмоприемника 1 (Z -канал) включает в себя N геофонов 21 (211, 212…21N), которые через соответствующие инструментальные усилители 22 (221, 222…22N), сумматор 23, обратный фильтр 24, состоящий из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр 25 высоких частот соединены с драйвером 26 аналого-цифрового преобразователя, подключенному к источнику 27 опорного напряжения (см. фиг. 2).
Таким образом, микросейсмические сигналы, регистрируемые геофонами (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) с каждого ортогонального направления, соответственно, X, Y и Z, преобразуются в аналоговые электрические сигналы.
Блок 2 управления и регистрации микросейсмических сигналов (см. фиг. 3) содержит блок 28 аналого-цифрового преобразователя (АЦП), подключенный к блоку 29 опорного напряжения. Блок 28 АЦП содержит три микросхемы 30, 31, 32.
Микросхемы АЦП 30, 31, 32 принимают аналоговый сигнал, от соответствующих геофонов (71, 72…7N,), (141, 142…14N,) и (211, 212…21N), и через, соответственно, цифровые изоляторы 33, 34, 35 шин данных (ЦИШД) и мультиплексоры 36, 37, 38 соединены с микроконтроллером 39 управления, подключенным к ЦИШД 33, 34, 35, GPS/ГЛОНАСС приемнику 40, соединенному с активной GPS/ГЛОНАСС антенной 41, и генератору 42 тактовых сигналов.
Блок 3 процессорный (см. фиг. 4) представляет собой одноплатный компьютер 43, соединенный с микроконтроллером 39 блока 2 управления и регистрации микросейсмических сигналов управления.
Одноплатный компьютер 43 имеет карту 44 памяти, порты 45 USB, модуль 46 Bluetooth, модуль 47 Wi-Fi и разъем 48 RJ-45 сетевого приемопередатчика Gigabit Ethernet.
На лицевой панели корпуса 49 цифрового сейсмометра размещены активная GPS/ГЛОНАСС антенна 41, порты 45 USB, разъем 48 RJ-45, разъем 50 для подключения источника питания и пузырьковый уровень 51 горизонта, а также три светодиода 52 - LED-индикаторы - («Power», «GPS», «Mode») для индикации режима работы цифрового сейсмометра и кнопка 53 "Старт/Стоп". Светодиоды 52 и кнопка 53 подключены к микроконтроллеру 39 управления.
Пример конкретного выполнения и работы сейсмоприемника 1.
Сейсмоприемник 1 представляет собой трехкоординатный сейсмоприемник и является мобильным широкополосным устройством на базе геофонов GS-ONE LF с собственной частотой 4,5 Гц (URL: https://geospace-ufa.ru/products/geofonybez-korpusov/gs-one-lf/:[сайт]).
Сейсмоприемник 1 содержит, в каждом блоке ПМС 4, 5, 6, платы из соответствующих инструментальных усилителей (81, 82…8N), (151, 152…15N), (221, 222…22N), соответствующих сумматоров 9, 16, 23 и соответствующие схемы корректировки амплитудно-частотной характеристики каждого геофона (71, 72…7N,), (141, 142…14N,) и (211, 212…21N).
Поскольку чувствительность одного геофона GS-ONE LF (89,4 В/м/с) является недостаточной в системах регистрации микросейсмических данных, на каждое ортогональное направление (X, Y, Z) установлено N геофонов: (71, 72…7N,), (141, 142…14N,) и (211, 212…21N), сигналы с которых, проходя через соответствующие инструментальные усилители (81, 82…8N), (151, 152…15N), (221, 222…22N), суммируются с необходимым коэффициентом усиления при помощи соответствующих сумматоров 9, 16, 23, в результате чего общая чувствительность сейсмоприемника 1 достигает величины порядка 2000 В/м/с, что сопоставимо с широкополосными цифровыми сейсмометрами, используемыми в сетях сейсмологического наблюдения.
На каждом геофоне (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) установлен коэффициент демпфирования, равный единице, при помощи, подключенного параллельно геофону, шунтирующего резистора Rd, номинал сопротивления которого определяется из соотношения:
где hm - механическое демпфирование, Rc - сопротивление катушки геофона, т - масса подвижной части геофона, а)0 - собственная частота геофона, G - чувствительность геофона при открытой цепи (см. фиг. 6).
Каждый геофон (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу (см. фиг. 5).
Каждый инструментальный усилитель (81, 82…8N), (151, 152…15N), (221, 222…22N) представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ (см. фиг. 5).
Выходной дифференциальный сигнал каждого геофона (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) поступает на соответствующий инструментальный усилитель (81, 82…8N), (151, 152…15N), (221, 222…22N), который преобразует симметричный сигнал в несимметричный.
Выходной сигнал каждого инструментального усилителя (81, 82…8N), (151, 152…15N), (221, 222…22N) поступает на соответствующий сумматор 9, 16, 23, который производит суммирование всех сигналов от N геофонов (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) в соответствующем ортогональном направлении (X, Y, Z).
Данное суммирование приводит к уменьшению шума в выходном сигнале и увеличивает соотношение сигнал/шум в  раз.
раз.
Каждый сумматор 9, 16, 23 представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе каждого сумматора 9, 16, 23 определяется из соотношения:

где V1, V2,…VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала (см. фиг. 5).
Основным ограничением аппаратной корректировки частотной характеристики геофона является наличие аппаратного шума, прежде всего шума операционных усилителей.
В качестве операционных усилителей, входящих в состав сумматоров 9, 16, 23, обратных фильтров 10, 17, 24 выбраны малошумящие прецизионные операционные усилители ОРА2211 от компании Texas Instruments со спектральной плотностью мощности шума 1,1 нВ/Гц.
Данные усилители имеют сверхнизкие значения температурного дрейфа и низкое электропотребление, что является преимуществом при применении в автономных системах сейсмологического мониторинга.
Для восстановления амплитудно-частотной характеристики каждого геофона (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) в диапазоне частот от ω1 до ω0, где ω0 собственная частота геофона, а ω1 нижняя частота коррекции амплитудно-частотной характеристики геофона, использована схема коррекции на основе обратного фильтра.
Выходной сигнал с каждого сумматора 9, 16, 23 поступает на соответствующий обратный фильтр 10, 17, 24, каждый из которых представляет собой два последовательно соединенных интегратора с крутизной частотной характеристики 12 дБ/октаву (крутизна частотной характеристики каждого интегратора 6 дБ/октаву).
Реализация каждого обратного фильтра 10, 17, 24 на базе двух последовательно соединенных интеграторов представлена на фиг. 6.
Передаточная характеристика первого полосового интегратора определяется из соотношения:
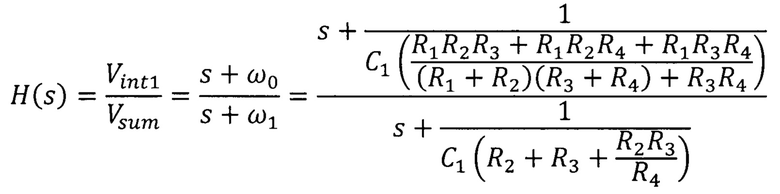
где Vint1 - выходной сигнал первого полосового интегратора; Vsum -выходной сигнал с сумматора.
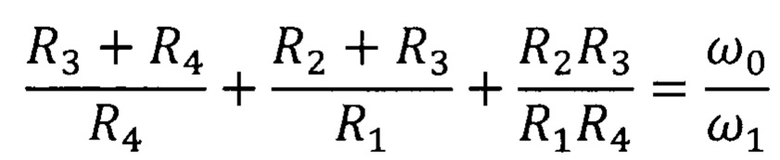
По заданным значениям C1,R2,R3 можно определить номиналы сопротивления R1 и R4 при помощи следующих уравнений:

Передаточная характеристика второго полосового интегратора определяется из соотношения:
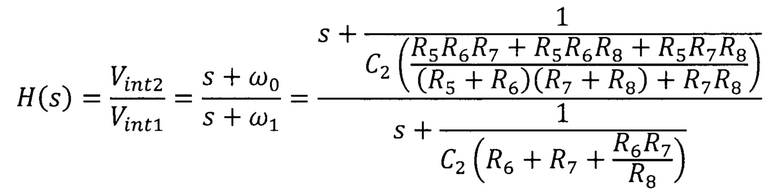
где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
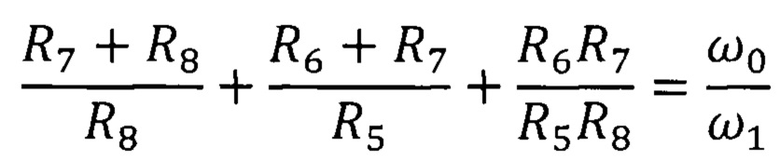
По заданным значениям C2, R6, R7 можно определить номиналы сопротивления R5 и R8 при помощи следующих уравнений:
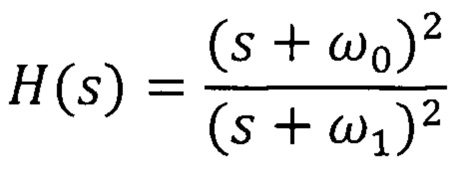
Соответственно два последовательно включенных интегратора формируют передаточную характеристику:
Для расширения частотного диапазона геофона GS-ONE LF в области 0,5-4,5 Гц, использована схема коррекции на основе обратного фильтра.
Обратные фильтры 10, 17, 24 имеют усиление 12 дБ на октаву в полосе частот 0,5-4,5 Гц.
Для того, чтобы обеспечить устойчивый режим работы схемы коррекции и подавления низкочастотного шума, который усиливается при прохождении обратного фильтра в полосе частот ниже частоты корректировки ω1 (в области частот ниже 0,5 Гц) были применены, в качестве фильтров 11, 18, 25 высоких частот, два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, которые подавляют все частоты ниже 0,5 Гц.
Реализация каждого фильтра 11, 18, 25 высоких частот на базе двух последовательно соединенных фильтров высоких частот Баттерворта 2-го порядка представлена на фиг. 7.
Передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения:

где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
Передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения:

где Vhpƒ2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка.
Для передачи аналогового сигнала в тракт аналого-цифровых преобразователей выходной сигнал с каждого фильтра 11, 18, 25 высоких частот подключен к соответствующему драйверу 12, 19, 26 аналого-цифрового преобразователя, в качестве которых выбраны прецизионные драйверы LMP8350 со сверхнизкими искажениями, которые преобразовывают несимметричный сигнал в симметричный. Реализация каждого драйвера 12, 19, 26 аналого-цифрового преобразователя представлена на фиг. 8.
Содержащиеся, в каждом блоке ПМС 4, 5, 6, платы из соответствующих инструментальных усилителей (81, 82…8N), (151, 152…15N), (221, 222…22N), соответствующих сумматоров 9, 16, 23 и соответствующие схемы корректировки амплитудно-частотной характеристики каждого геофона GS-ONE LF (71, 72…7N,), (141, 142…14N,) и (211, 212…21N), позволяют расширить рабочий частотный диапазон геофонов GS-ONE LF в сторону низких частот с первоначальной 4,5 Гц до 0,5 Гц.
Точность измерения аналого-цифрового преобразователя, а также его температурная стабильность зависит в значительной степени от точности и стабильности источника опорного напряжения.
Точность преобразования при проведении абсолютных измерений определяется точностью опорного сигнала. Однако в задачах сейсмологического мониторинга главным показателем является не абсолютная точность, а стабильность и повторяемость результатов измерения с малым уровнем вносимого аппаратного шума. Поэтому в качестве источников 12, 19, 26 опорного напряжения выбрана микросхема ADR02, которая имеет выходное напряжение 5 В, значение шума 10 мкВ в полосе частот 0,1-10 Гц и температурную стабильность 3 ppm/С.
Таким образом, выполнение сейсмоприемника 1 в соответствии с предложенным техническим решением, позволяет регистрировать слабые сейсмические сигналы в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1, повысить помехозащищенность выходного сигнала за счет использования симметричного выходного сигнала, повысить точность и достоверность регистрируемых сейсмических сигналов за счет применения группирования геофонов, повысить надежность и мобильность работы устройства при полевом использовании за счет применения геофонов в качестве первичного преобразователя.
Пример конкретного выполнения и работы блока 2 управления и регистрации микросейсмических сигналов.
Блок 2 управления и регистрации микросейсмических сигналов предназначен для сбора аналогового сигнала, поступающего с блока 1 сейсмоприемника, и управления режимами работы цифрового сейсмометра.
Блок 2 содержит плату фильтрации и оцифровки аналоговых сигналов, полученных с сейсмоприемника 1, микроконтроллер 39 управления и модуль синхронизации.
Плата фильтрации и оцифровки аналоговых сигналов позволяет одновременно выполнять оцифровку сигналов по трем каналам цифрового сейсмометра.
Микроконтроллер 39 управления представляет собой микроконтроллер STM32F030C, работающий на частоте 48 МГц.
Программное обеспечение микроконтроллера 39 блока 2 управления и регистрации предназначено для выполнения логики работы основных узлов цифрового сейсмометра.
Блок 2 управления и регистрации обеспечивает следующие функции:
- синхронизация цифрового сейсмометра с астрономическим временем и определение его географических координат;
- установка расписания времени начала и остановки регистрации данных ММ;
- запуск и остановка режима регистрации данных от кнопки 53 «Старт/Стоп», размещенной на лицевой панели корпуса 49;
- индикация статуса и режимов работ цифрового сейсмометра при помощи светодиодов 52, размещенных на лицевой панели корпуса 49;
- оцифровка сигналов, поступающих с сейсмоприемника 1;
- формирование и передача массива данных на одноплатный компьютер 43 по интерфейсу SPI;
- прием и обработка управляющих команд с одноплатного компьютера 43 по интерфейсу SPI.
Модуль синхронизации включает в себя GPS/ГЛОНАСС приемник 40 и генератор 42 тактовых сигналов, соединенный с микроконтроллером 39. Модуль синхронизации измерительного комплекса по GPS/ГЛОНАСС позволяет осуществлять синхронную запись с сейсмоприемника 1 с заданной точностью. GPS/ГЛОНАСС приемник 40 соединен с активной антенной 41 и обеспечивает привязку измеряемых микросейсмических сигналов к мировому времени и текущим географическим координатам.
На качество записанной информации при регистрации микросейсмического сигнала существенное влияние оказывает правильно подобранный аналого-цифровой преобразователь.
Частота дискретизации аналого-цифрового преобразователя определяет, с какой частотой будет выполняться выборка аналогового сигнала и преобразовываться в цифровой сигнал.
Чем выше частота дискретизации, тем ближе результат преобразования к исходному сигналу. С учетом того, что верхняя граничная частота геофонов (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) ограничена величиной порядка 1 кГц, частота дискретизации аналого-цифрового преобразователя выбрана в области 4 кГц.
Важным параметром, определяющим качество преобразования, является разрядность аналого-цифрового преобразователя. Разрядность определяет количество уровней квантования входного аналогового сигнала и характеризует порог чувствительности и динамический диапазон аналого-цифрового преобразователя.
С учетом требования повышенной точности измерений за счет более высокого уровня разрядности оцифровки, в качестве АЦП 30, 31, 32 выбран 32 битный сигма-дельта аналого-цифровой преобразователь ADS1281IPW от компании Texas Instruments.
В составе микросхем АЦП 30, 31, 32 имеется встроенный цифровой фильтр с бесконечной импульсной характеристикой первого порядка, что позволяет подавлять низкочастотный тренд, который может присутствовать в сигнале от соответствующих геофонов (71, 72…7N,), (141, 142…14N,) и (211, 212…21N), вне рабочем диапазоне частот.
За счет применения в блоке 2 управления и регистрации трех аналого-цифровых преобразователей (микросхемы АЦП 30, 31, 32), оцифровка сигнала от соответствующих геофонов (71, 72…7N,), (141, 142…14N,) и (211, 212…21N) выполняется одновременно, в отличие от последовательной оцифровки сигнала в известных устройствах.
Это позволяет более точно определять поляризацию микросейсмического сигнала, которая необходима в задачах определения направления прихода сейсмической волны, а также для локализации гипоцентра сейсмического источника методами поляризационного анализа. Частота оцифровки АЦП 30, 31, 32 задается программно и устанавливается от 250 Гц до 4 кГц.
В качестве блока 29 опорного напряжения выбрана микросхема ADR02 от компании Analog Devices, которая имеет выходное напряжение 5 В, значение шума 10 мкВ в полосе частот 0,1-10 Гц и температурную стабильность 3 ppm/С.
Реальный потенциал высокоточного аналого-цифрового преобразователя может быть достигнут только при хорошем разделении аналоговых и цифровых цепей. Цифровые компоненты, работающие с высокочастотными логическими сигналами, могут создавать значительные радиочастотные помехи, которые в свою очередь через возвратные токи могут инжектироваться в контур аналогового сигнала. Поэтому в системах со смешанными сигналами крайне желательно физически отделить чувствительные аналоговые компоненты от шумных цифровых компонент, предотвращая тем самым наложение цифровых шумов на аналоговые цепи сигналов преобразователя и, как результат, улучшить соотношение сигнал-шум, помехозащищенность и электромагнитную совместимость.
По этой причине аналоговая часть схемы, содержащая АЦП 30, 31, 32, гальванически изолирована от шумных цифровых компонент при помощи, соответственно, ЦИШД 33, 34, 35, в качестве которых выбран цифровой изолятор шин данных ADuM 140х от компании Analog Devices.
Сбор данных, задание режимов работы и синхронизация всех трех АЦП 30, 31, 32 осуществляется программно, через синхронно-последовательный интерфейс SPI, при помощи микроконтроллера 39 управления, в качестве которого выбран микроконтроллер STM32F030C от компании STMicroelectronics.
Однако интерфейс SPI АЦП 30, 31, 32 не имеет порта Chip Select, позволяющего подключать к одному ведущему устройству несколько ведомых устройств. Для того чтобы решить данную проблему, использованы мультиплексоры 36, 37, 38, в качестве которых выбран мультиплексор TS5A3357 от компании Texas Instruments, что позволило как взаимодействовать каждым аналого-цифровым преобразователем в отдельности, так и отправлять широковещательные команды одновременно всем трем АЦП 30, 31, 32.
За счет применения модуля синхронизации, достигается привязка измеряемых микросейсмических сигналов к мировому времени и к текущим географическим координатам. В качестве GPS/ГЛОНАСС приемника 40 выбран энергоэффективный GPS/ГЛОНАСС приемник SIM68ML от компании Simcom, построенный на базе чипсета MediaTek, обладающий малым током потребления и большой чувствительностью в совмещенном режиме GPS/ГЛОНАСС. Чувствительность приемника SIM68ML составляет порядка -160 дБм и обладает функцией фильтрации помех и оповещения об их наличии, работает в комплексе с активной антенной 41, которая имеет встроенный LNA усилитель/фильтр на 28 дБи и крепится на лицевой панели корпуса 49 цифрового сейсмометра. Приемник SIM68ML подключен к микроконтроллеру 39 посредством последовательного интерфейса UART, работающего на скорости 115200 бод/сек. Помимо этого, приемник SIM68ML также выдает сигнал PPS (Pulse Per Second).
Момент передачи сообщения GPS/ГЛОНАСС приемника 40 никак не связан с передним фронтом сигнала PPS. В случае привязки GPS/ГЛОНАСС приемника 40 к спутникам, данная микросхема начинает генерировать сигнал PPS и между сигналами PPS выдает через интерфейс UART точное время по Гринвичу и координаты устройства.
Сигнал PPS подключен на один из портов общего назначения микроконтроллера 39.
При поступлении сигнала PPS, в микроконтроллере 39 срабатывает внешнее прерывание, в обработчике данного прерывания микроконтроллер 39 считывает сообщение с GPS/ГЛОНАСС приемника 40.
Далее происходит валидация данного сообщения и в случае успешной валидации, выполняется парсинг данных и считывается текущее время, которое соответствует последнему сигналу PPS.
Следующим шагом микроконтроллер 39 программирует внутренние часы реального времени, записывает полученные временные данные для следующей секунды времени и ждет прихода очередного сигнала PPS. При поступлении очередного сигнала PPS, в микроконтроллере 39 также срабатывает внешнее прерывание, в обработчике прерывания микроконтроллер 39 запускает часы реального времени уже с записанными временными данными. Далее работа часов тактируется от внешнего высокостабильного генератора 42 тактовых сигналов в качестве которого выбран высокоточный термокомпенсированный кварцевый генератор с частотой 12,8 МГц и стабильностью частоты 0.28 ppm.
Пример конкретного выполнения и работы процессорного блока 3.
Блок 3 представляет собой одноплатный компьютер 43, построенный на базе процессора Broadcom ВСМ2711, Cortex-А72 @ 1.5GHz, который через последовательный интерфейс SPI, сопряжен с блоком 2 управления и регистрации.
В данной конфигурации блок 2 является ведомым устройством и управление блоком 2 полностью осуществляется через одноплатный компьютер 43.
Программное обеспечения для процессорного блока 3 реализовано в виде скрипта, которое запускается во время загрузки операционной системы и обеспечивает следующие функции:
- считывание с карты памяти 44 информации, определяющей текущую настройку режима работы цифрового сейсмометра и ее передачу на микроконтроллер 39 блока 2 управления и регистрации по интерфейсу SPI;
- прием массива данных, отправленных микроконтроллером 39 блока 2 управления и регистрации, последующая запись на карту памяти 44 microSD и/или потоковую передачу через разъем 48 RJ-45 сетевого приемопередатчика Gigabit Ethernet на внешнее устройство.
- прием команд управления с внешнего устройства.
- отправка команд на блок 2 управления и регистрации.
Текущие настройки режима работы цифрового сейсмометра хранятся на карте памяти 44 microSD процессорного блока 3. Процессорный блок 3 работает на операционной системе GNU Linux и для сопряжения с внешними устройствами имеет на борту несколько портов 45 USB, модуль 46 Bluetooth Bluetooth 5.0 Low Energy, модуль 47 Wi-Fi 2.4GHz/5GHz IEEE 802.11 b/g/n/ac и разъем 48 RJ-45 сетевого приемопередатчика Gigabit Ethernet.
Цифровой сейсмометр работает следующим образом.
Перед началом работы, цифровой сейсмометр устанавливается на горизонтальную поверхность, уровень горизонта которого определяется через пузырьковый уровень горизонта 51 расположенной на лицевой панели устройства. При включении питания цифрового сейсмометра, на процессорном блоке 3 происходит загрузка операционной системы, после чего запускается программа управления устройством и происходит считывание с карты 44 памяти информации, определяющей настройку режима работы цифрового сейсмометра.
Информация о режиме работы цифрового сейсмометра определяет: частоту оцифровки сейсмического сигнала, активные каналы регистрации данных, режим работы устройства (режим ожидания или режим регистрации сейсмических сигналов), расписание времени начала и остановки регистрации данных, направление потока оцифрованных данных или запись на карту 44 памяти или потоковую передачу через разъем 48 сетевого приемопередатчика Gigabit Ethernet.
Все настройки работы цифрового сейсмометра для полной инициализации устройства отправляются на микроконтроллер 39 блока 2 управления посредством синхронно-последовательного интерфейса SPI. После чего микроконтроллер 39 в зависимости от текущих настроек переходит или в режим ожидания, или в режим регистрации сейсмических сигналов.
В режиме ожидания микроконтроллер 39 поддерживает следующие функциональные команды: старт режима регистрации данных, задание расписания времени начала и остановки регистрации данных, задание настройки режима работы цифрового сейсмометра.
В режиме регистрации сейсмических сигналов, данные с каждой координаты блока ПМС 4, 5, 6 преобразований в виде дифференциального сигнала поступает на вход соответствующего АЦП 30, 31, 32.
По команде, поступающей с микроконтроллера 39 по синхронно-последовательной шине данных SPI, начинается синхронное преобразование на каждом АЦП 30, 31, 32. По завершению преобразования каждый АЦП 30, 31, 32 выставляет прерывание готовности цифровых данных микроконтроллеру 39.
В обработчике прерывания микроконтроллер 39 производит считывание данных из каждого АЦП 30, 31, 32 по интерфейсу SPI и формирует пакет данных, выделяя на каждый канал по 4 байта памяти. Далее данный пакет данных буферизуется и при достижении определенного размера буфера, данные отправляются через интерфейс SPI на процессорный блок 3, где в зависимости от текущих настроек происходит или запись полученных данных на карту 44 памяти или передача через разъем 48 сетевого приемопередатчика Gigabit Ethernet.
Запись данных на карту 44 памяти производиться в бинарном формате. В начале каждого файла записывается служебная информация, содержащая следующие данные: идентификационный номер цифрового сейсмометра, количество каналов записи, частота оцифровки, количество бит АЦП, время начала и время остановки записи, координаты цифрового сейсмометра.
В режиме регистрации на микроконтроллер 39 блока 2 управления и регистрации можно отправить команду остановки регистрации данных, после чего цифровой сейсмометр переходит в режим ожидания.
При подключении через разъем 50 источника питания к цифровому сейсмометру, загорается светодиод "Power" и выполняется инициализация устройства. После чего GPS/ГЛОНАСС приемник 40 устройства переходит в режим поиска сигнала от спутников GPS и ГЛОНАСС.
В случае обнаружения сигнала от спутников, выполняется синхронизация устройства с астрономическим временем, и устройство переходит в режиме ожидания, при этом загорается светодиод "GPS", а светодиод "Mode" находится в выключенном состоянии. При установке начало времени регистрации, светодиод "Mode" начинает мигать, и в процессе регистрации светодиод "Mode" светится непрерывно. Запуск цифрового сейсмометра в режим регистрации можно осуществить также путем нажатия кнопки 53 "Старт/Стоп".
Все операции управления и настройки цифрового сейсмометра выполняются через персональный компьютер или любое мобильное устройство (на фиг. 1 не показаны) через разъем 48 RJ-45 сетевого приемопередатчика Gigabit Ethernet или модуль 47 Wi-Fi.
Таким образом, выполнение цифрового сейсмометра в соответствии с предложенным техническим решением, позволяет повысить точность и достоверность определения направления прихода сейсмической волны и снизить ошибки определения координат гипоцентров сейсмических событий, а также повысить надежность и мобильность работы автономного устройства при полевом использовании и транспортировке, обеспечить возможность регистрации слабых сейсмических сигналов в большом динамическом диапазоне за счет улучшения соотношения сигнал/шум и ослабления низкочастотного шума в области частот ниже нижней граничной частоты ω1, повысить точность и достоверность регистрируемых микросейсмических сигналов за счет применения группирования геофонов, повысить помехозащищенность выходного сигнала за счет использования симметричного выходного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА РАЗРАБОТКИ НЕФТЯНЫХ И ГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2022 |
|
RU2799398C1 |
| СЕЙСМИЧЕСКИЙ ПРИЕМНИК | 2022 |
|
RU2795783C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| Регистратор малошумящий низкочастотного аналогового сигнала | 2018 |
|
RU2685067C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
Изобретение может быть использовано в системах регистрации сейсмических данных. Цифровой сейсмометр включает в себя последовательно соединенные сейсмоприемник, блок управления и регистрации микросейсмических сигналов (БУРМС), блок процессорный (БП), размещенные в едином корпусе. В сейсмоприемнике расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z. Каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей подключены к сумматору, соединенному через обратный фильтр, состоящему из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот (ФВЧ) с драйвером аналого-цифрового преобразователя (АЦП), подключенным к источнику опорного напряжения. БУРМС содержит блок АЦП, подключенный к блоку опорного напряжения. Блок АЦП содержит три микросхемы АЦП, каждая из которых принимает аналоговый сигнал от соответствующих геофонов и через цифровой изолятор шин данных (ЦИШД) и мультиплексор соединена с микроконтроллером управления, подключенным к ЦИШД, GPS/ГЛОНАСС приемнику, соединенному с активной антенной, и генератору тактовых сигналов. БП представляет собой одноплатный компьютер, соединенный с микроконтроллером БУРМС. Одноплатный компьютер имеет карту памяти, порты USB, модуль Bluetooth, модуль Wi-Fi и разъем RJ-45 сетевого приемопередатчика Gigabit Ethernet. На лицевой панели корпуса размещены активная GPS/ГЛОНАСС антенна, порты USB, разъем RJ-45, разъем для подключения источника питания и пузырьковый уровень горизонта, светодиоды для индикации режима работы цифрового сейсмометра и кнопка Старт/Стоп, подключенные к микроконтроллеру управления. ФВЧ представляет собой два последовательно соединенных ФВЧ Баттерворта 2-го порядка. Драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный. Технический результат: повышение точности и достоверности определения направления прихода сейсмической волны и снижение ошибок определения координат гипоцентров сейсмических событий. 5 з.п. ф-лы, 8 ил.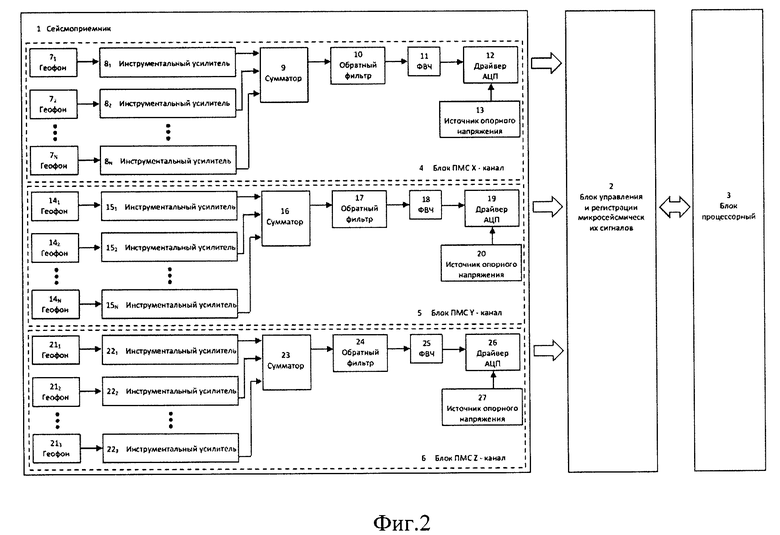
1. Цифровой сейсмометр, характеризующийся тем, что включает в себя последовательно соединенные сейсмоприемник, блок управления и регистрации микросейсмических сигналов, блок процессорный, размещенные в едином корпусе, причем в сейсмоприемнике расположены три блока приемников микросейсмических сигналов (ПМС), ортогонально ориентированных в направлениях X, Y, Z, при этом каждый блок ПМС включает в себя N геофонов, которые через соответствующие N инструментальных усилителей подключены к сумматору, соединенному через обратный фильтр, состоящему из двух последовательно соединенных полосовых интеграторов, выполненных с возможностью функционирования в полосе частот от нижней граничной частоты ω1 до собственной частоты геофона ω0, и фильтр высоких частот с драйвером аналого-цифрового преобразователя (АЦП), подключенным к источнику опорного напряжения, блок управления и регистрации микросейсмических сигналов содержит блок АЦП, подключенный к блоку опорного напряжения, причем блок АЦП содержит три микросхемы АЦП, каждая из которых принимает аналоговый сигнал от соответствующих геофонов и через цифровой изолятор шин данных (ЦИШД) и мультиплексор соединена с микроконтроллером управления, подключенным к ЦИШД, GPS/ГЛОНАСС приемнику, соединенному с активной антенной, и генератору тактовых сигналов, а блок процессорный представляет собой одноплатный компьютер, соединенный с микроконтроллером блока управления и регистрации микросейсмических сигналов управления, причем одноплатный компьютер имеет карту памяти, порты USB, модуль Bluetooth, модуль Wi-Fi и разъем RJ-45 сетевого приемопередатчика Gigabit Ethernet, при этом на лицевой панели корпуса размещены активная GPS/ГЛОНАСС антенна, порты USB, разъем RJ-45, разъем для подключения источника питания и пузырьковый уровень горизонта, а также светодиоды для индикации режима работы цифрового сейсмометра и кнопка Старт/Стоп, подключенные к микроконтроллеру управления, причем фильтр высоких частот представляет собой два последовательно соединенных фильтра высоких частот Баттерворта 2-го порядка, при этом передаточная характеристика первого фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
 где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
где Vint2 - выходной сигнал со второго полосового интегратора; Vhpƒ1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а передаточная характеристика второго фильтра высоких частот Баттерворта 2-го порядка определяется из соотношения
 где Vhpf2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhpf1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный.
где Vhpf2 - выходной сигнал второго фильтра высоких частот Баттерворта 2-го порядка, Vhpf1 - выходной сигнал первого фильтра высоких частот Баттерворта 2-го порядка, а драйвер аналого-цифрового преобразователя представляет собой прецизионный драйвер со сверхнизкими искажениями, который преобразовывает несимметричный сигнал в симметричный.
2. Цифровой сейсмометр по п. 1, отличающийся тем, что на каждом геофоне установлен коэффициент демпфирования, равный единице, при помощи подключенного параллельно геофону шунтирующего резистора Rd, номинал сопротивления которого рассчитывается из соотношения 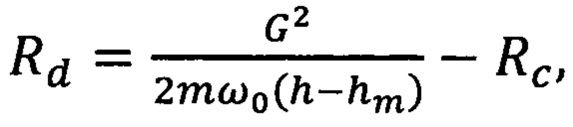 где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
где hm - механическое демпфирование, Rc - сопротивление катушки геофона, m - масса подвижной части геофона, ω0 - собственная частота геофона, G - чувствительность геофона при открытой цепи.
3. Цифровой сейсмометр по п. 1, отличающийся тем, что каждый геофон содержит два подтягивающих резистора Rp, имеющих номинал сопротивления, равный 100 кОм, посредством которых выходные сигналы каждого геофона подтянуты к земляному потенциалу.
4. Цифровой сейсмометр по п. 1, отличающийся тем, что каждый инструментальный усилитель представляет собой дифференциальный усилитель со сверхнизкими шумами с коэффициентом усиления 0 дБ.
5. Цифровой сейсмометр по п. 1, отличающийся тем, что сумматор представляет собой аналоговый сумматор на операционном усилителе, причем выходной сигнал Vsum на выходе сумматора определяется из соотношения  где V1, V2, … VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
где V1, V2, … VN - выходные напряжения с каждого геофона, а соотношение номиналов резисторов Rƒ и Ra задает необходимый коэффициент усиления суммарного сигнала.
6. Цифровой сейсмометр по п. 1, отличающийся тем, что передаточная характеристика в полосе частот ω0 - ω1 первого полосового интегратора определяется из соотношения  где Vint1 - выходной сигнал первого полосового интегратора, Vsum - выходной сигнал с сумматора, а передаточная характеристика в полосе частот ω0 - ω1 второго полосового интегратора определяется из соотношения
где Vint1 - выходной сигнал первого полосового интегратора, Vsum - выходной сигнал с сумматора, а передаточная характеристика в полосе частот ω0 - ω1 второго полосового интегратора определяется из соотношения 
 где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
где Vint2 - выходной сигнал со второго полосового интегратора, Vint1 - выходной сигнал с первого полосового интегратора.
| Регистратор малошумящий низкочастотного аналогового сигнала | 2018 |
|
RU2685067C1 |
| 0 |
|
SU111689A1 | |
| Устройство для виброакустического контроля состояния породного массива | 1983 |
|
SU1133568A1 |
| US 6370083 B1, 09.04.2002 | |||
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ИЛЛЮЗИИ ПЕРЕОЦЕИКИ ВЕРТИКАЛИ | 0 |
|
SU171967A1 |
| Трехкомпонентный скважинный сейсмометр | 2019 |
|
RU2717166C1 |
