Изобретение относится к области оптико-электронной техники, предназначен для передачи азимута плоскости обратных отвесов (OO) в плоскость собственного зеркала и хранения эталонного направления.
Прототипом изобретения является «Автоматизированный прибор привязки к обратным отвесам», описанный в патенте 2730370 и содержащий: объектив, фокусирующий изображение на ПЗС-матрицу, в которой каждый фоточувствительный элемент имеет свои уникальные координаты, в котором дополнительно введены микроконтроллер, поворотный блок и зеркальная призма, при этом ПЗС-матрица предназначена для преобразования энергии фотонов в цифровой сигнал, приходящий на микроконтроллер и содержащий информацию о координатах затемненных пикселей, микроконтроллер предназначен для вычисления необходимого угла поворота прибора, в зависимости от пришедшего цифрового сигнала, и передачи соответствующего цифрового управляющего сигнала поворотному блоку, состоящему из шагового мотора с пьезоактуатором, а зеркальная призма, выполнена с двугранными углами под 45° при основании. Недостатками прототипа являются: устройство не может использоваться для хранения эталонного направления, так как в конструкция прототипа не используется арретир для фиксации положения прототипа в пространстве; большое время приема и обработки сигнала с ПЗС-матрицы, используемой в прототипе, что снижает точность передачи азимута.
Задача изобретения состоит в повышении точности передачи азимута плоскости обратных отвесов в плоскость зеркала устройства, хранения эталонного направления (азимута) и снижение времени выставки устройства.
Поставленная задача реализуется в устройстве привязки к обратным отвесам, содержащем поворотный блок, на выходном валу которого закреплены: зеркально-призменный блок с уровнем, объектив и светочувствительная матрица расположенные на оси вращения вала, процессор обработки сигнала матрицы и микроконтроллер, при этом, микроконтроллер связан с процессором и поворотным блоком, согласно изобретению, содержащее КМОП-матрицу в качестве светочувствительной матрицы и ротационный пьезодвигатель в качестве поворотного блока и арретира.
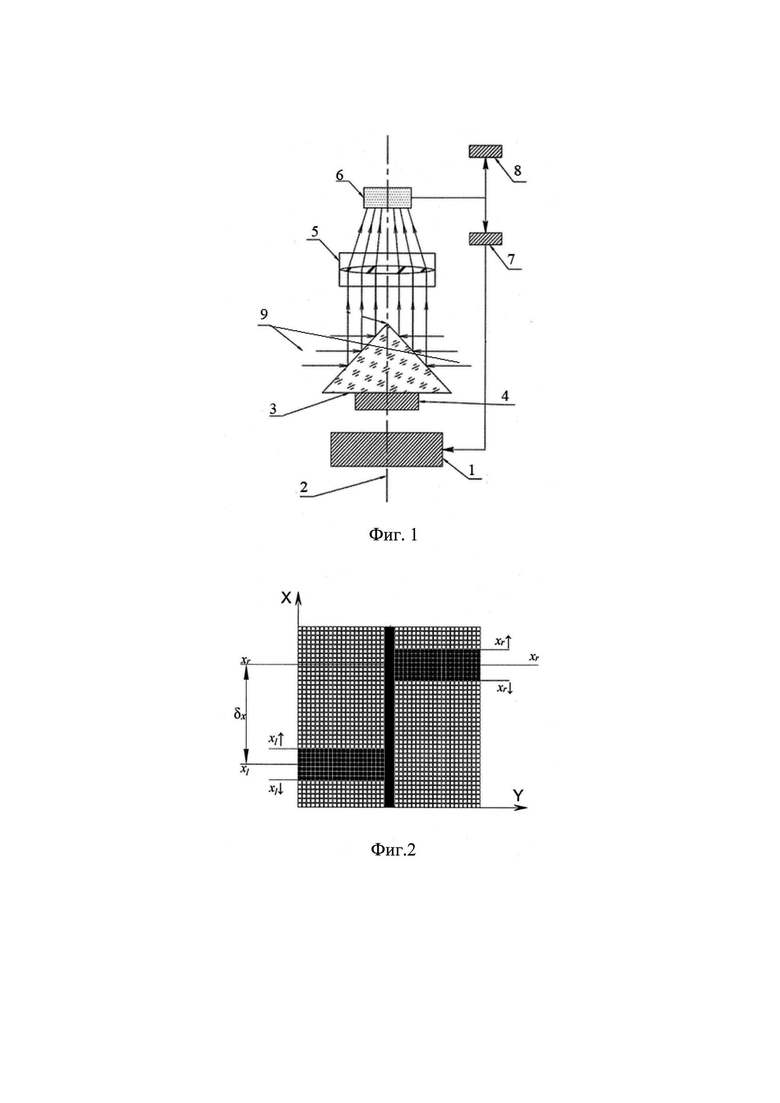
На фиг. 1 показана структурная схема устройства привязки к обратным отвесам (УПОО), включающая в себя следующие элементы: поворотный блок (1) с выходным валом (на фиг. не показан), образующим ось вращения (2), зеркально-призменный блок (ЗПБ) (3) с уровнем (4), объектив с автофокусом (5), координатно-чувствительный матричный фотоприемник (светочувствительная матрица) (6) и процессором обработки сигнала матрицы с микроконтроллером (7). При необходимости может содержать монитор (8) для визуального контроля. Световые лучи прошедшие через струны 00 (9) образуют изображения 00 на фотоприемнике.
УПОО устанавливается на специальном рабочем месте, расположенном на развязанном фундаменте, между двумя обратными отвесами так, что его вертикальная ось вращения находится в плоскости, образованной струнами обратных отвесов. Посредством уровня производят горизонтирование устройства.
УПОО представляет собой устройство, содержащее: ротационный пьезодвигатель, на выходном валу которого закреплены зеркально-призменный блок с уровнем, объектив и светочувствительная матрица расположенные на оси вращения выходного вала, процессор и микроконтроллер. Выходной видеосигнал процессора обрабатывается в микроконтроллере с последующим формированием цифрового управляющего сигнала, подаваемого на пьезодвигатель. Продольная ось выходного вала образует его ось вращения. Электронный уровень предназначен для горизонтирования ЗПБ. При необходимости визуального контроля работы, устройство может комплектоваться монитором (связан с контроллером). Светочувствительная матрица представляет собой КМОП-матрицу. ЗПБ представляет собой треугольную призму, у которой двугранные углы при основании равны 45°, что позволяет одновременно проецировать изображения двух струн обратных отвесов на КМОП-матрицу.
Процесс выставки УПОО в плоскость обратных отвесов разделен на следующие режимы: грубая выставка, точная выставка и удержание.
Грубая выставка заключается в приведении изображений OO в поле зрения объектива. Для этого оператор подает напряжение на пьезодвигатель и вращает призму вокруг вертикальной оси так, чтобы изображения 00 наблюдались на матрице.
Точная выставка производится автоматически. С помощью ЗПБ и объектива изображения струн ОО фокусируются на матрице и в процессоре формируется видеосигнал, содержащий эти изображения. Видеосигнал обрабатывается в микроконтроллере и вырабатываются сигналы управления пьезодвигателем.
Алгоритм функционирования микроконтроллера позволяет раздельно обрабатывать изображения струн 00 и управлять пьезодвигателем так, чтобы УПОО приводился в фиксированное положение, при котором изображения струн ОО устанавливались в одну линию.
На фиг. 2 показаны положения изображений струн ОО и ребра ЗПБ на матрице. Темными пикселями показаны изображения струн ОО.
В микроконтроллере выполняются следующие вычисления:
- Х-координаты средних линий левого и правого изображений, (пиксель):
где  - соответственно координаты нижней и верхней границ левого изображения;
- соответственно координаты нижней и верхней границ левого изображения;  ,
,  - соответственно координаты нижней и верхней границ правого изображения.
- соответственно координаты нижней и верхней границ правого изображения.
- расстояние между средними линиями изображений:
В зависимости от знака и величины δx на выходе микроконтроллера формируется сигнал управления пьезодвигателем, в результате чего УПОО устанавливается в упомянутое фиксированное положение.
Управляющий сигнал пьезодвигателя формируется по формуле:
где km - масштабный коэффициент в зависимости от точности поворота ротора пьезодвигателя в микрошаговом режиме.
После поворота прибора на заданный угол опрос матрицы повторяется и, если параметр δх превышает некоторое допустимое значение, формируется новый управляющий сигнал пьезодвигателю. Если параметр δx не превышает допустимого значения, то загорается специальный индикатор, сигнализирующий о том, что УПОО выставлен в плоскость ОО и прибор переходит в режим удержания.
Удержание УПОО в фиксированном положении (арретирование) осуществляется отключением питания пьезодвигателя. В этом же режиме опрос матрицы повторяется с некоторой периодичностью. И если параметр δx превышает допустимое значение, то загорается специальный индикатор, свидетельствующий о том, что УПОО не выставлен в плоскость ОО.
Таким образом, заявлено устройство привязки к обратным отвесам, содержащее поворотный блок, на выходном валу которого закреплены: зеркально-призменный блок с уровнем, объектив и светочувствительная матрица расположенные на оси вращения вала, процессор обработки сигнала матрицы и микроконтроллер, при этом, микроконтроллер связан с процессором и поворотным блоком. Отличительная особенность устройства заключается в том, что содержит КМОП-матрицу в качестве светочувствительной матрицы и ротационный пьезодвигатель в качестве поворотного блока и арретира.
Техническим результатом является возможность повышения точности передачи азимута плоскости обратных отвесов в плоскость зеркала устройства, хранения эталонного направления (азимута) и снижение времени выставки устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный прибор привязки к обратным отвесам | 2019 |
|
RU2730370C1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| ХРАНИТЕЛЬ НАПРАВЛЕНИЯ | 1988 |
|
RU1573985C |
| Способ коррекции углов визирования на точку | 2020 |
|
RU2758860C1 |
| СПОСОБ ПРИЕМА ИЗОБРАЖЕНИЙ | 2004 |
|
RU2279187C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ НОЧНОГО/ДНЕВНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2187138C2 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| Устройство компьютерной системы панорамного телевизионного наблюдения с повышенной разрешающей способностью | 2019 |
|
RU2721381C1 |
Использование: для передачи азимута плоскости обратных отвесов (OO) в плоскость собственного зеркала и хранения эталонного направления. Сущность изобретения заключается в том, что устройство привязки к обратным отвесам содержит поворотный блок, на выходном валу которого закреплены: зеркально-призменный блок с уровнем, объектив и светочувствительная матрица, расположенные на оси вращения вала, процессор обработки сигнала матрицы и микроконтроллер, при этом микроконтроллер связан с процессором и поворотным блоком, причем в качестве светочувствительной матрицы используется КМОП-матрица, а ротационный пьезодвигатель используется в качестве поворотного блока и арретира. Технический результат: обеспечение возможности повышения точности передачи азимута плоскости обратных отвесов в плоскость зеркала устройства, а также обеспечение возможности хранения эталонного направления (азимута) и снижения времени выставки устройства. 2 ил.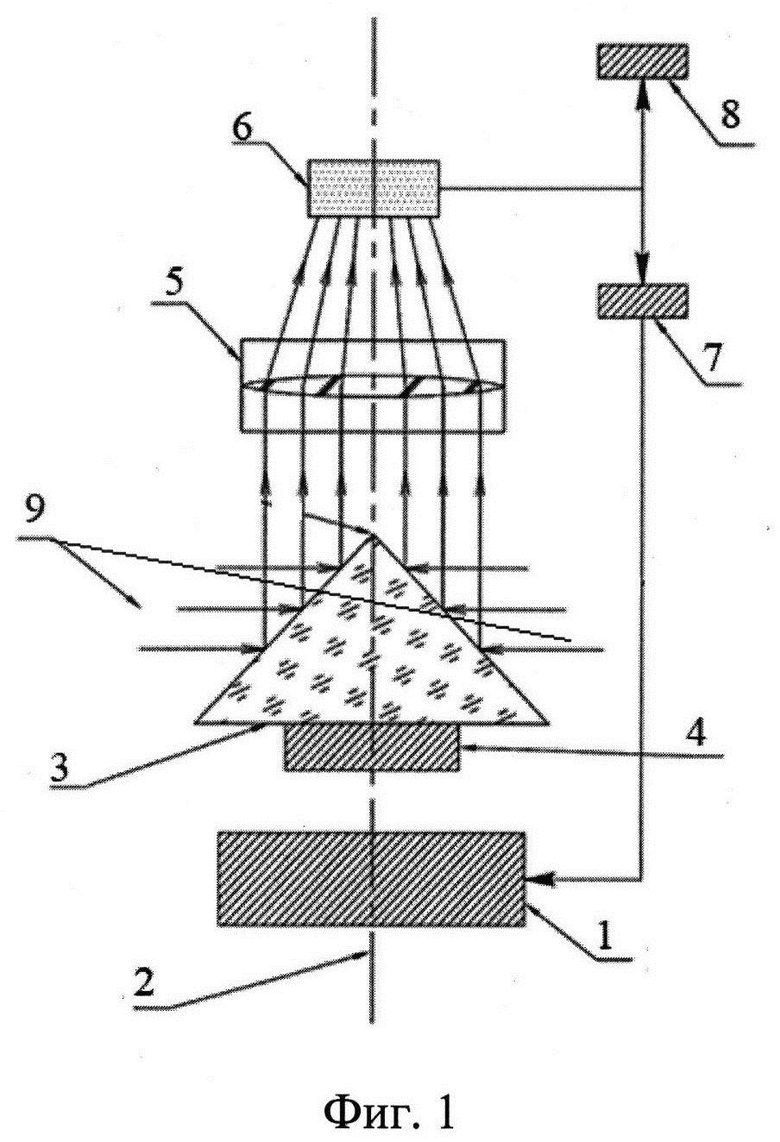
Устройство привязки к обратным отвесам, содержащее поворотный блок, на выходном валу которого закреплены: зеркально-призменный блок с уровнем, объектив и светочувствительная матрица, расположенные на оси вращения вала, процессор обработки сигнала матрицы и микроконтроллер, при этом микроконтроллер связан с процессором и поворотным блоком, отличающееся тем, что содержит КМОП-матрицу в качестве светочувствительной матрицы и ротационный пьезодвигатель в качестве поворотного блока и арретира.
| Автоматизированный прибор привязки к обратным отвесам | 2019 |
|
RU2730370C1 |
| СПОСОБ ПАССИВНОГО НЕСКАНИРУЮЩЕГО МУЛЬТИСПЕКТРАЛЬНОГО ВСЕАЗИМУТАЛЬНОГО ОПРЕДЕЛЕНИЯ ПЕЛЕНГОВ И/ИЛИ КООРДИНАТ И ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1999 |
|
RU2154284C1 |
| Устройство для азимутальной ориентации | 1984 |
|
SU1210081A1 |
| US 6453569 B1, 24.09.2002 | |||
| JPH 08278135 A, 22.10.1996. | |||

