Изобретение относится к радиотехнике и может быть использовано, в частности, для обработки радиосигналов и определения пеленгационных параметров узкополосных радиосигналов.
Известен патент RU2562796C1 «Радиоприемное устройство с непрерывной автоматической регулировкой восприимчивости», опубликован 10.09.2015. Устройство может быть использовано для создания радиосредств с программируемой архитектурой с цифровой обработкой сигналов в условиях воздействия блокирующих сигналов с динамически изменяющимся уровнем и априорной неопределенностью параметров для обеспечения устойчивой радиосвязи в сложной помеховой обстановке. Недостатки известного устройства:
- устройство определяет частотные параметры в блоке быстрого преобразования Фурье (БПФ), но неспособно определить тип и величину девиации частоты для узкополосных частотно-модулированных и частотно-манипулированных сигналов, количество скачков и тип узкополосных фазо-кодо-манипулированных сигналов;
- устройство не позволяет определить значения фазовых сдвигов между сигналами для определения угловых координат источников излучения.
Известен патент RU2715057C1 «Корреляционно-фазовый пеленгатор», опубликован 25.02.2020, принятый за прототип. Пеленгатор содержит две антенны, два высокочастотных ВЧ-блока, два демодулятора, два спектроанализатора, блок сравнения спектров, два запоминающих устройства, пульт управления, блок формирования кодов, два согласованных фильтра, обеспечивающих на своих выходах формирование взаимно-корреляционных функций между входным фазоманипулированным сигналом и кодом, содержащимся в них, и измеритель задержки между максимумами взаимно-корреляционных функций.
Недостатки прототипа:
- с помощью известного пеленгатора можно определить только угловые координаты радиосигналов с известными законами кодирования, т.е. невозможно определить параметры сигналов и обрабатывать сигналы с априорно неизвестными законами кодирования;
- известный пеленгатор содержит в своем составе только два приемных канала, что не позволяет обеспечить реализацию многобазового фазового пеленгатора для устранения неоднозначности определения угловых координат в широкой полосе рабочих частот;
- известный пеленгатор предназначен для обработки сигналов только от источников фазоманипулированных сигналов, т.е. обработка частотно-модулированных и частотно-манипулированных сигналов им не предполагается.
Техническим результатом заявляемого изобретения является повышение точности определения пеленгационных параметров сигналов в условиях приема узкополосного полезного сигнала в условиях наличия помех при значительных отрицательных значениях уровня сигнал/шум, в частности при определении частоты несущей с точностью до единиц килогерц, определение значений фазовых сдвигов между сигналами в N приемных каналах для определения угловых координат.
Для достижения технического результата в устройстве определения пеленгационных параметров принимаемых узкополосных радиосигналов для передачи их пользователям, содержащем блок приема узкополосных сигналов, модуль определения параметров узкополосных сложных сигналов, модуль передачи пеленгационных параметров, дополнительно введен блок фазовой автоподстройки опорных частот, а блок приема узкополосных сигналов выполнен многоканальным, каждый канал которого состоит из последовательно соединенных аналого-цифрового преобразователя (АЦП), модуля обнаружения полезного узкополосного сложного сигнала, выполненного в виде блока быстрого преобразования Фурье (БПФ), модуля накопления данных спектрального анализа, модуля определения динамического порога, модуля хранения потока данных, цифрового квадратурного генератора, модуля определения разностей фаз между принимаемым узкополосным сигналом и квадратурными каналами цифрового генератора и модуля определения параметров узкополосных сложных сигналов, выходы которого соединены с модулем передачи информации, причем в каждом канале приемного блока вход дискретизации АЦП соединен с соответствующим выходом блока фазовой автоподстройки опорных частот, выход АЦП соединен с информационными входами модуля определения разностей фаз, выход блока БПФ соединен с входом модуля определения параметров сложных сигналов, а выход модуля определения разностей фаз между каналами соединен с модулем передачи информации.
Кроме того, устройство выполнено на сверхбольшой интегральной схеме (СБИС).
Кроме того, в устройстве модуль определения разностей фаз между каналами выполнен в виде двух перемножителей, выходы которых через соответствующие фильтры нижних частот соединены с арифметико-логическим устройством (АЛУ), выполненным с возможностью определения значения разности фаз между принимаемым сигналом в i-том канале и опорной частотой цифрового квадратурного генератора.
Изобретение поясняется чертежом.
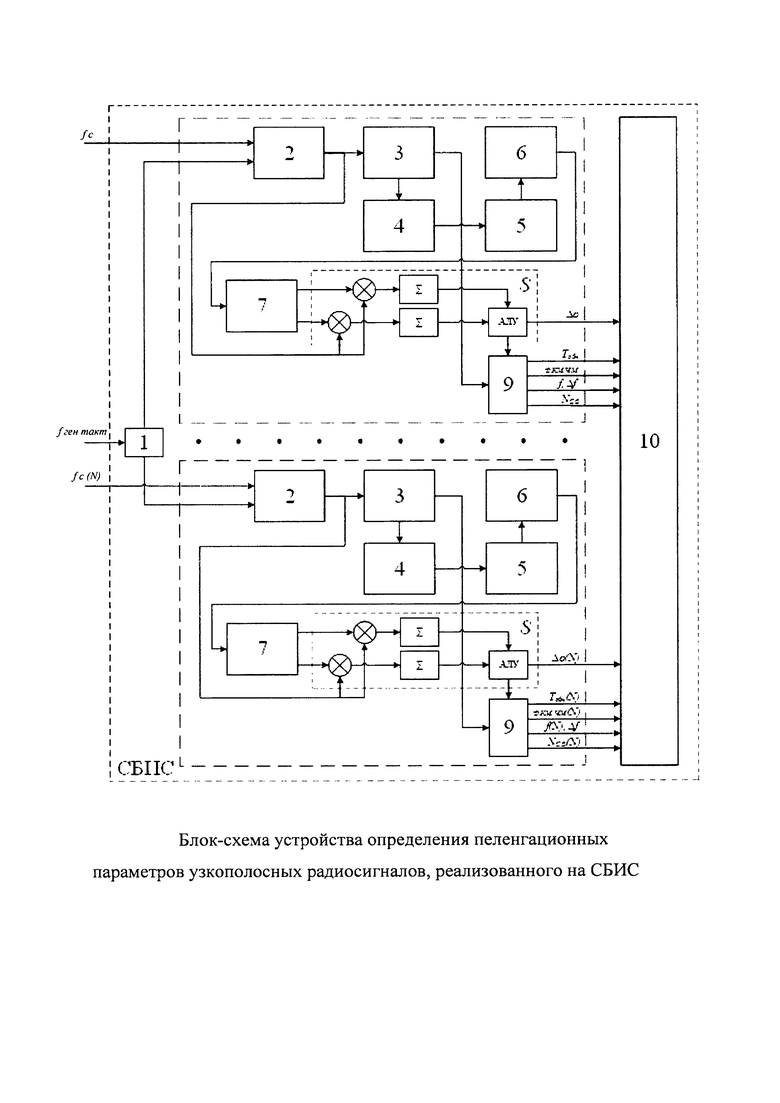
На фигуре изображена схема устройства определения пеленгационных параметров узкополосных радиосигналов и введены обозначения:
1. Блок фазовой автоподстройки опорной частоты (ФАПЧ) (частоты дискретизации).
2. Аналого-цифровой преобразователь (АЦП).
3. Модуль обнаружения полезного узкополосного сложного сигнала, реализующий быстрое преобразование Фурье (БПФ).
4. Модуль накопления данных спектрального анализа.
5. Модуль определения динамического порога.
6. Модуль хранения потока данных.
7. Цифровой квадратурный генератор.
8. Модуль определения разностей фаз между каналами и опорным сигналом генератора.
9. Модуль определения пеленгационных параметров сложных сигналов.
10. Модуль передачи информации.
Обработка узкополосных сигналов от источников на Земле производится в блоке обработки информации с применением СБИС, в которой реализованы модуль обнаружения, модуль накопления данных спектрального анализа для повышения уровня сигнал/шум, а также модуль определения частотных и фазовых параметров сложных сигналов.
В состав устройства входят: модуль настройки опорной частоты (частоты дискретизации) ФАПЧ (1), реализованный на СБИС, модуль АЦП (2), модуль обнаружения полезного узкополосного сигнала, реализующий БПФ (3), модуль накопления данных спектрального анализа для повышения уровня сигнал/шум в заданной полосе (4), модуль определения динамического порога (5), модуль хранения потока данных (6), цифровой квадратурный генератор с возможностью задания частоты генерируемого сигнала (7), модуль определения разностей фаз между каналами и опорным сигналом генератора (8), модуль определения параметров сложных сигналов (9), модуль передачи информации (10).
Устройство работает следующим образом.
При включении питания устройство загружается и запускается. Генератор тактовой частоты подает сигнал на ФАПЧ, реализованный на СБИС, с целью настройки тактовой частоты АЦП на заданные в конфигурации значения.
От внешнего устройства синхронизации выдается команда на начало наблюдения и передаются параметры для настройки внутренних модулей из состава устройства.
На опорной частоте (с частотой дискретизации, получаемой из опорного сигнала от блока ФАПЧ) производится аналого-цифровое преобразование входного сигнала, результаты которого в потоковом режиме с частотой дискретизации АЦП поступают на модуль обнаружения, который реализует БПФ заданного размера в конвейерном режиме.
Результаты БПФ поступают на вход модуля накопления данных (4), в котором данные спектра сигнала накапливаются в течение заданного количества циклов. В модуле накопления данных (4) производится суммирование накопленных значений спектра для каждой частоты, что позволяет повысить уровень сигнал/шум за счет усиления полезного сигнала и подавления шумовых значений спектра.
С выхода модуля накопления данных (4) результирующий спектр поступает на вход модуля определения динамического порога (5), в котором определяется пороговое значение спектра, превышение которого означает наличие полезного сигнала. Пороговое значение определяется как сумма двух третей части максимального значения сигнала в спектре и усредненного значения спектра в заданной полосе частот.
При обнаружении полезного сигнала в модуле определения динамического порога (5) сигнал поступает на модуль хранения потока данных. Модуль хранения потока данных может накапливать информацию (время обнаружения и частоту сигнала с точностью до единиц килогерц) об обнаруженных сигналах. Если в модуле хранения потока данных появилась информация об обнаруженном сигнале, то выдается значение частоты на цифровой квадратурный генератор (7) и команда на подачу сигнала с выходов генератора (7) на перемножитель в модуле (8) определения разностей фаз между каналами и опорным сигналом генератора.
В устройстве реализовано 2N каналов перемножения для реализации свертки сигналов от N входных каналов. Результаты перемножения поступают на фильтр нижних частот, реализованный с помощью сумматоров, в котором происходит накопление сигнала в заданное при настройке внутренних модулей время.
Накопленные значения поступают на вход арифметико-логического устройства (АЛУ), в котором определяется значение разности фаз между сигналом в i-том канале и общим для всех приемных каналов опорным сигналом. АЛУ реализует функцию arctg с дополнением до 2π, на основе итерационного метода сведения прямых вычислений сложных функций к выполнению простых операций сложения и сдвига для оптимизации затрачиваемых ресурсов СБИС.
С выхода модуля определения разностей фаз значения фазового сдвига в N каналах поступают в модуль передачи информации для дальнейшей обработки в блоке определения угловых координат источника радиоизлучения. Также в модуль передачи информации поступает время начала накопления, соответствующее времени обнаружения сигнала, и частота сигнала.
Одновременно с накоплением сигнала в модуле определения разностей фаз (8) результаты свертки в потоковом режиме поступают в модуль определения параметров сложных сигналов (9), в котором проводится статистический анализ характера свертки сигнала в заданном канале. Совместно с анализом результатов свертки сигнала обрабатываются данные о спектре сигнала, полученные ранее в модуле обнаружения.
Данные об обнаруженном виде модуляции, количестве и величине изменения параметров сигнала, а также времени их изменения поступают с выхода модуля определения параметров сложных сигналов в модуль передачи информации.
Использование в составе заявляемого устройства СБИС с указанными модулями обеспечивает в сравнении с прототипом заявляемого устройства обнаружение полезного узкополосного сигнала при значительных отрицательных значения уровня сигнал/шум, определение частоты несущей с точностью до единиц килогерц, определение значений фазовых сдвигов между сигналами в N приемных каналах для определения угловых координат источников излучения в широкой полосе рабочих частот системы в режиме реального времени вне зависимости от вида входного сигнала.
Заявляемое устройство также позволяет определять тип и величину девиации частоты для узкополосных частотно-модулированных и частотно-манипулированных сигналов, количество скачков и тип узкополосных фазо-кодо-манипулированных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДАННЫХ ДЕКАМЕТРОВОГО ДИАПАЗОНА РАДИОВОЛН | 2017 |
|
RU2658591C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| РАДИОПЕЛЕНГАТОР | 2012 |
|
RU2505831C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2011 |
|
RU2458355C1 |
Изобретение относится к радиотехнике и может быть использовано, в частности, для обработки радиосигналов и определения пеленгационных параметров узкополосных радиосигналов. Техническим результатом изобретения является повышение точности определения пеленгационных параметров сигналов в условиях приема узкополосного полезного сигнала в условиях наличия помех при значительных отрицательных значениях уровня сигнал/шум, в частности при определении частоты несущей с точностью до единиц килогерц, определение значений фазовых сдвигов между сигналами в N приемных каналах для определения угловых координат. Устройство определения пеленгационных параметров узкополосных радиосигналов для передачи их пользователям дополнительно содержит блок фазовой автоподстройки опорных частот. Блок приема узкополосных сигналов выполнен многоканальным. Каждый канал блока приема узкополосных сигналов состоит из последовательно соединенных аналого-цифрового преобразователя (АЦП), модуля обнаружения полезного узкополосного сложного сигнала, модуля накопления данных спектрального анализа, модуля определения динамического порога, модуля хранения потока данных, цифрового квадратурного генератора, модуля определения разностей фаз между принимаемым узкополосным сигналом и квадратурными каналами цифрового генератора и модуля определения параметров узкополосных сложных сигналов. 2 з.п. ф-лы, 1 ил.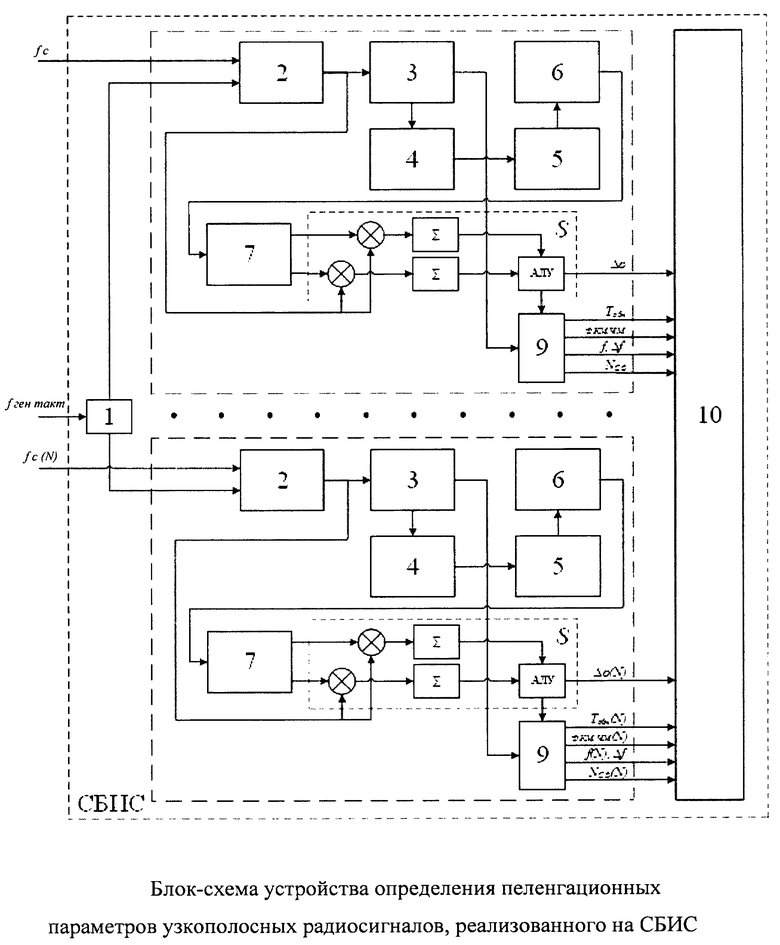
1. Устройство определения пеленгационных параметров узкополосных радиосигналов для передачи их пользователям, содержащее блок приема узкополосных сигналов, модуль определения параметров узкополосных сложных сигналов, модуль передачи параметров, отличающееся тем, что дополнительно введен блок фазовой автоподстройки опорных частот, а блок приема узкополосных сигналов выполнен многоканальным, каждый канал которого состоит из последовательно соединенных аналого-цифрового преобразователя (АЦП), модуля обнаружения полезного узкополосного сложного сигнала, выполненного в виде блока быстрого преобразования Фурье (БПФ), модуля накопления данных спектрального анализа, модуля определения динамического порога, модуля хранения потока данных, цифрового квадратурного генератора, модуля определения разностей фаз между принимаемым узкополосным сигналом и квадратурными каналами цифрового генератора и модуля определения параметров узкополосных сложных сигналов, выходы которого соединены с модулем передачи информации, причем в каждом канале приемного блока вход дискретизации АЦП соединен с соответствующим выходом блока фазовой автоподстройки опорных частот, выход АЦП соединен с информационными входами модуля определения разностей фаз, выход блока БПФ соединен с входом модуля определения параметров сложных сигналов, а выход модуля определения разностей фаз между каналами соединен с модулем передачи информации.
2. Устройство по п. 1, отличающееся тем, что выполнено на сверхбольшой интегральной схеме (СБИС).
3. Устройство по п. 1, отличающееся тем, что модуль определения разностей фаз между каналами выполнен в виде двух перемножителей, выходы которых через соответствующие фильтры нижних частот соединены с арифметико-логическим устройством (АЛУ), выполненным с возможностью определения значения разности фаз между принимаемым сигналом в i-м канале и опорной частотой цифрового квадратурного генератора.
| Корреляционно-фазовый пеленгатор | 2019 |
|
RU2715057C1 |
| УЗКОПОЛОСНОЕ УСТРОЙСТВО КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ | 2019 |
|
RU2704241C1 |
| WO 2015144707 A1, 01.10.2015 | |||
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| EP 2955856 A1, 16.12.2015 | |||
| JPS 6182180 A, 25.04.1986 | |||
| РАДИОПРИЕМНОЕ УСТРОЙСТВО С НЕПРЕРЫВНОЙ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКОЙ ВОСПРИИМЧИВОСТИ | 2014 |
|
RU2562796C1 |

