Область техники, к которой относится изобретение
Настоящее изобретение относится к области оптического измерения относительного положения между первым объектом и вторым объектом.
В частности, изобретение относится к трехкоординатному измерению положения первого объекта относительно второго объекта. Измерения такого типа используют во многих областях применительно к линейным и угловым измерениям, включая, в частности, но не исключительно, область станочной обработки, в частности, посредством обрабатывающего инструмента или иную станочную обработку путем удаления материала.
В области станочной обработки существует необходимость точного знания положения держателя инструмента относительного держателя заготовки, чтобы обеспечить диапазон обработки, соответствующий плану механической обработки, разработанному во время настройки станка.
Изготовление деталей посредством станочных модулей (обрабатывающего инструмента), в частности, токарных автоматов, автоматических токарных станков, токарно-фрезерных многоцелевых станков, фрезерных станков, обрабатывающих центров и станочных линий обычно содержит три отдельных этапа.
На первом этапе настройки (или преднастройки) оператор (например, оператор токарного автомата) определяет и проверяет на станочном модуле план механической обработки, то есть последовательность операций и смещений осей, которые необходимы для изготовления требуемой детали на станке. Оператор действует внимательно, чтобы получить наиболее эффективный план станочной обработки, т.е план, который дает возможность обработать данную заготовку посредством минимума операций, и при этом избежать соударений между инструментами или с изделием. Оператор выбирает инструмент, который должен быть использован, и проверяет качество получаемого изделия, например, качество поверхностей, соответствие допускам и т.п.
На втором этапе изготовления на предварительно настроенном станочном модуле изготовляют серию деталей с параметрами, которые были определены во время настройки. Данный этап является единственным этапом изготовления; его часто выполняют в течение 24 часов в сутки; при этом станочный модуль питают необработанным материалом посредством подающего устройства с магазином или посредством загрузчика заготовок.
Может быть так, что изготовление серии деталей прерывается, например, для замены изношенного инструмента, для изготовления деталей другого типа на том же самом станочном модуле, для технического обслуживания станка и т.п., а затем изготовление возобновляется. В этом случае необходим этап подготовки, чтобы применить параметры, которые были определены ранее во время настройки. Этот этап подготовки проходит быстрее, чем настройка.
Во время данной подготовки часто бывает необходимо произвести замену установленного на станке инструмента другим набором инструмента, который пригоден для предстоящей обработки. Точность позиционирования этого инструмента определяет качество обработки, но это позиционирование трудно воспроизводить на очередных этапах подготовки.
Кроме того, на этапе изготовления, в ходе обработки новых деталей, особенно на длительных промежутках времени вполне возможен уход положения держателя инструмента относительно держателя заготовки, в частности, вызванный тепловым расширением в станках.
Уровень техники
Поэтому в станках существующего уровня техники предлагались и предлагаются различные технические решения с целью гарантировать правильное положение держателя инструмента относительно держателя заготовки на этапе изготовления и на этапе подготовки, то есть правильное взаимное положение, которое соответствует взаимному положению держателя инструмента и держателя заготовки, которое было на этапе настройки.
Множество методов измерений in situ, применяемых в станках, предназначены для измерения взаимного положения заготовки или держателя заготовки и самого инструмента. Однако, в данном случае на измерение положения заготовки или держателя заготовки относительно инструмента оказывает влияние износ инструмента и тепловой дрейф в станке во время этой операции.
Кроме того, данный тип измерения взаимного положения, как правило, осуществляется по двум координатам, т.е. в двух направлениях, как в документе DE 202016004237U.
Поскольку такая регистрация взаимного положения заготовки или держателя заготовки и инструмента ограничена двумя координатами (например, Y и X -соответственно, для бокового и вертикального направлений), она не обладает достаточной полнотой, чтобы гарантировать правильное взаимное положение, так что приходится использовать другие средства для измерения третьей координаты (например, Z - в направлении подачи/уборки держателя заготовки, также называемом «направлением материала»). В данной ситуации увеличивается не только стоимость измерительного оборудования, но также затраты времени на реализацию, что также добавляет ошибку за счет использования двух серий измерения одновременно.
В документе US 2014362387 АА раскрыто оптическое измерительное устройство, помещенное на держатель инструмента, которое дает возможность проверять, что целевой объект не мешает держателю инструмента. В данном оптическом измерительном устройстве используется измерительный элемент с несколькими наклонными частями для определения геометрических параметров лазерного измерительного устройства, в частности, координаты между датчиком отраженного пучка и излучателем падающего пучка. Данный измерительный элемент не вовлечен в измерение положения держателя инструмента относительно целевого объекта, которым может служить заготовка, подлежащая станочной обработке.
В документе US 2010111630 АА раскрыта система изменения положения инструмента для металлорежущего станка, содержащая мишени неправильной формы, расположенные на инструменте, которая позволяет выполнять прецизионное оптическое измерение положения инструмента посредством оптических измерительных элементов, положение которых не задано.
В документе US 2007253002 АА раскрыта система для оптического измерения расстояния между двумя телами, оси которых не совпадают, содержащая соответственно излучающий элемент и приемный элемент, расположенные на торцах обоих тел.
В документе US5831734 описано техническое решение, в котором оптический датчик закреплен на держателе инструмента, и осуществляет регистрацию положения данного держателя инструмента относительно заготовки, которая подлежит станочной обработке и оснащена отличимой меткой (канавкой).
В документе US2014343890 предложено ручное (переносное) устройство, используемое в качестве вспомогательного средства при измерении положения объекта посредством лазерной системы. Данное переносное устройство содержит трехкоординатную мишень, которая содержит базовый конический торец с одной рабочей торцовой поверхностью, содержащей видимые реперные метки, и световозвращающий отражатель в центре.
В документе US2004202364 представлен калибровочный объект в форме призмы, каждая грань которой содержит видимые реперные метки, и возможно контрольную метку для идентификации рассматриваемой грани.
Однако, указанные технические решения не позволяют определять взаимное положение подлежащей обработке заготовки и инструмента за одну экспозицию (один акт съемки), чтобы одна такая экспозиция давала информацию, которая дает возможность определить данное взаимное положение по трем пространственным координатам.
Также указанные технические решения не позволяют обеспечить независимость параметров, которые изменяются в реальном времени во время станочной обработки, в частности, износ инструмента и температура инструмента и/или рабочее пространство станка, которое принимает заготовку, подлежащую обработке.
Раскрытие изобретения
Одна задача настоящего изобретения заключается в том, чтобы предложить технологию, которая дает возможность выполнять измерение положения держателя инструмента относительно держателя заготовки, а в более общем случае - измерение взаимного расположения первого объекта и второго объекта, технологию, которая свободна от ограничений известной методики измерений.
Другая задача настоящего изобретения заключается в том, чтобы предложить технологию, которая дает возможность выполнять измерение положения держателя инструмента относительно держателя заготовки, а в более общем случае - измерение взаимного расположения первого объекта и второго объекта, технологию, которая за одну экспозицию обеспечивает определение взаимного расположения первого объекта и второго объекта по трем координатам.
Согласно изобретению, указанная задача решается, в частности, посредством трехкоординатной мишени, которая может служить в качестве средства для отсчета положений, содержащего на своей рабочей грани:
• первую структуру, образующую плоскую базовую поверхность, поделенную по меньшей мере на:
- первый участок, поверхность которого обладает свойствами диффузного отражения, и
-второй участок, поверхность которого обладает свойствами зеркального отражения, которые отличаются от первых параметров отражения, причем второй участок разбит на ряд локальных зон, расположенных на первом участке, и
• вторую структуру, содержащую поверхность, которая наклонена относительно указанной плоской базовой поверхности. Такое устройство дает возможность регистрировать положение мишени по трем направлениям X, Y и Z, соответствующим Декартовой системе координат, причем у мишени имеется первая структура или базовая поверхность параллельная плоскости X, Y, и вторая структура или наклонная поверхность, которая в определенной степени проходит вдоль главного направления Z.
Согласно другому варианту осуществления изобретения, указанная плоская базовая поверхность разделена по меньшей мере на:
- первый участок, поверхность которого обладает отражающими свойствами в соответствии с первыми параметрами отражения, и
-второй участок, поверхность которого обладает отражающими свойствами в соответствии со вторыми параметрами отражения, которые отличаются от первых параметров отражения.
Согласно одному варианту осуществления изобретения, наклонная поверхность содержит равномерно распределенные по ней элементы рельефа. Согласно другому варианту, наклонная поверхность содержит равномерно распределенные по ней зеркальные элементы. В обоих случаях идея в том, чтобы иметь возможность регистрировать положение наклонной поверхности, которая в грубом приближении является плоской, в направлении Z ортогональном базовой поверхности. Чтобы выполнить это, в одном случае элементы рельефа образуют неоднородности поверхности или небольшие шероховатости; при этом наклонная поверхность, будучи шероховатой, обеспечивает диффузное отражение, которое позволяет оптической системе, которая смотрит на мишень, четко видеть часть наклонной поверхности: в частности, указанные элементы рельефа имеют размер более 700 нм, в частности более 1 мкм, а именно, имеют размер, который больше длины волны падающего света, в данном случае, видимого света. В ином случае, зеркальные элементы наклонной плоскости, расположенные согласно геометрической схеме, например, взаимно параллельные линии, находящиеся в направлении Z в разных положениях, являются визуально отличимыми от остальной наклонной поверхности (которая предпочтительно демонстрирует диффузное отражение). Следовательно, оптическая система, которая смотрит на мишень, имеет возможность четко видеть участок наклонной поверхности с одним или более зеркальными элементами.
Данная трехкоординатная мишень содержит на своей рабочей грани двойную структуру, соответственно образующую первую плоскую базовую (отсчетную) поверхность и вторую отсчетную поверхность - плоскость, которая наклонена относительно первой базовой поверхности. Такая пространственная (трехкоординатная) геометрия мишени, наряду с особыми и отличающимися оптическими характеристиками поверхностей, которые соответственно образуют первую отсчетную поверхность и вторую отсчетную поверхность, позволяет осуществлять оптическую регистрацию положения данной мишени относительно используемой оптической системы в пространстве трех измерений X, Y и Z. Согласно одному варианту осуществления, используемая оптическая система дает возможность осуществлять оптическую регистрацию положения, которая фактически завершается измерением взаимного расположения посредством одного единственного этапа съемки (экспозиции) как первой плоской базовой поверхности, так и второй наклонной отсчетной поверхности: таким образом, измерение заключается в одновременной съемке изображения первой плоской базовой поверхности и второй наклонной отсчетной поверхности. Такая одновременная съемка может быть произведена за две, три или более итераций, даже за п экспозиций (где п - целое число большее единицы, например, число в интервале от двух до пятнадцати). Таким образом, можно располагать несколькими изображениями (серией изображений), как первой плоской базовой поверхности, так и второй наклонной отсчетной поверхности, что дает возможность выполнять обработку посредством вычислительных алгоритмов не одного изображения первой плоской базовой поверхности и второй наклонной отсчетной поверхности, а серии таких изображений, и таким образом, уменьшать погрешность измерения.
В частности, в соответствии с одним возможным вариантом осуществления, такое формирование изображения (-й) первой плоской базовой поверхности и второй наклонной отсчетной поверхности выполняется посредством оптической системы, которая используется без необходимости ее регулировки, что будет объяснено ниже. В данном случае отсутствует какая-либо особая настройка, которую необходимо выполнять в оптической системе, что обеспечивает значительную экономию времени при выполнении измерения относительного положения трехкоординатной мишени. Данное техническое решение дает заметное преимущество по сравнению с существующими техническими решениями, состоящее в том, что не требуется ни выполнение нескольких измерительных операций (этапов), ни изменения настройки, в частности, фокусного расстояния оптической системы, которая смотрит на мишень
Также, когда данная мишень используется для измерения положения держателя инструмента относительно держателя детали, становится возможным обеспечить независимость от износа инструмента и изменений температуры инструмента и/или рабочего пространства станка, в котором размещают заготовку (деталь), подлежащую обработке, путем установки мишени на держателе инструмента.
Настоящее изобретение относится также к трехкоординатному оптическому измерительному устройству для измерения расположения первого объекта относительно второго объекта, содержащему рассмотренную выше трехкоординатную мишень, предназначенную для установки на первый объект, и оптическую систему, содержащую первую съемочную систему и вторую съемочную систему, и предназначенную для установки на второй объект, причем разность между фокусным расстоянием второй съемочной системы и фокусным расстоянием первой съемочной системы лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность от наклонной поверхности.
Таким образом, оптическая система может одновременно определять свое положение относительно, с одной стороны, базовой поверхности (или первой отсчетной поверхности) посредством изображения, сформированного первой съемочной системой, и с другой стороны относительно по меньшей мере одной зоны наклонной поверхности (или второй отсчетной поверхности), которое определяется посредством изображения, сформированного второй съемочной системой, чье положение на мишени относительно базовой поверхности известно.
Такая оптическая система может быть помещена на один из двух рассматриваемых объектов (второй объект), и дает возможность посредством двух съемочных систем выполнять съемку двух резких изображений в двух близко расположенных местах на другом из указанных двух объектов (первом объекте), при этом указанные два места на первом объекте расположены на слегка разных расстояниях от второго объекта. Такая оптическая система дает возможность, о чем подробнее будет сказано ниже, посредством двух изображений осуществлять регистрацию (по трем координатам) положения первого объекта относительно второго объекта, который несет на себе оптическую систему.
В соответствии с одним возможным вариантом осуществления, оптическая система устроена так, что оптический тракт от объекта (первого объекта) проходит по меньшей мере через часть одной из съемочных систем -первой или второй съемочной системы - прежде чем достигает другой из указанных съемочных систем. Таким образом, можно иметь участок оптического тракта в качестве входа/выхода оптической системы, который является общим или очень близким к первой и второй съемочным системам. Таким образом можно не только сочетать первую и вторую съемочные системы в одной и той же оптической системе, но также иметь возможность осуществлять регистрацию изображений двух близкорасположенных мест на первом объекте, которые находятся друг от друга на расстоянии нескольких десятых долей миллиметра, даже нескольких миллиметров, или на расстоянии меньше одного миллиметра.
Настоящее изобретение также относится к системе для трехкоординатного оптического измерения расположения первого объекта относительно второго объекта, содержащей:
- агрегат, содержащий первый объект и второй объект, и
- рассмотренную выше оптическое измерительное устройство.
В соответствии с первым возможным вариантом, оптическое измерительное устройство построено так, что:
-первая съемочная система выполнена так, что ее задняя фокальная плоскость может совпадать с базовой поверхностью первой структуры, а
- вторая съемочная система выполнена так, что ее задняя фокальная плоскость может пересекать наклонную поверхность трехкоординатной мишени.
В соответствии со вторым возможным вариантом, совместимым с первым возможным вариантом, или взятым отдельно, оптическое измерительное устройство построено так, что:
- фокусное расстояние первой съемочной системы позволяет размещать фокус изображения на первой структуре,
- фокусное расстояние второй съемочной системы позволяет размещать фокус изображения на второй структуре
Упомянутым агрегатом является, например, часть оборудования, станок, модуль, в частности, научный или технический модуль, содержащий первый объект и второй объект, которые можно перемещать друг относительно друга, и для которых необходимо выполнять операцию регистрации взаимного расположения в пространстве трех измерений. К примеру, указанным агрегатом является металлорежущий станок или станочный модуль, в котором первым объектом является держатель инструмента или один из держателей инструмента, а вторым модулем является держатель детали, который несет на себе подлежащую обработке заготовку (пруток, болванку и т.п.). В соответствии с другим примером, агрегатом является блок для монтажа электронных компонентов на печатной плате, при этом первым объектом является держатель печатной платы, а вторым объектом - зажим или иной инструмент для установки электронного компонента. В соответствии с еще одним примером, агрегатом является модуль для культивирования клеток для засеивания ряда лунок на микропланшетах, при этом первым объектом является держатель микропланшета, а вторым объектом - держатель устройства для инжекции клеток, подлежащих культивированию.
Настоящее изобретение относится также к способу для трехкоординатного оптического измерения в соответствии с тремя ортогональными направлениями X, Y и Z положения первого объекта относительно второго объекта, которые находятся на одной линии и удалены друг от друга в главном направлении Z, содержащему этапы, на которых:
- - предусматривают трехкоординатную мишень, образующую базу для отсчета положений и содержащую на рабочей грани:
• первую структуру, образующую плоскую базовую поверхность, поделенную по меньшей мере на:
- первый участок, поверхность которого обладает свойствами диффузного отражения, и
- второй участок, поверхность которого обладает свойствами зеркального отражения, причем второй участок разбит на ряд локальных зон, расположенных на первом участке, и
• вторую структуру, содержащую поверхность, которая наклонена относительно указанной плоской базовой поверхности,
- предусматривают оптическую систему, содержащую первую съемочную систему и вторую съемочную систему,
- указанную трехкоординатную мишень размещают на первом объекте,
- указанную оптическую систему размещают на втором объекте так, что с одной стороны, фокусное расстояние первой съемочной системы позволяет разместить фокус изображения первой съемочной системы на первой структуре мишени, а, с другой стороны, фокусное расстояние второй съемочной системы позволяет разместить фокус изображения второй съемочной системы на второй структуре мишени,
- производят по меньшей мере одну экспозицию одновременно посредством первой съемочной системы, принадлежащей оптической системе, и посредством второй съемочной системы, принадлежащей оптической системе, и тем самым при каждой экспозиции, выполняемой посредством оптической системы, с одной стороны, первая съемочная система формирует первое изображение мишени, которое дает возможность определить положение второго участка относительно первого участка (в частности положение локальных зон) на базовой поверхности, что дает, во-первых, первую часть информации о положении мишени относительно первой съемочной системы в направлении X, а, во-вторых, вторую часть информации о положении мишени относительно первой съемочной системы в направлении Y, а, с другой стороны, вторая съемочная система формирует второе изображение мишени, содержащее резко изображаемый участок, соответствующий местоположению наклонной поверхности второй структуры, что дает третью часть информации о расстоянии между мишенью и второй съемочной системой в направлении Z. В соответствии с одним возможным вариантом осуществления, указанную оптическую систему выполняют так, что разность между фокусным расстоянием второй съемочной системы и фокусным расстоянием первой съемочной системы лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность от наклонной поверхности. В соответствии с другим возможным вариантом осуществления, указанную оптическую систему выполняют так, что оптический тракт первой съемочной системы и оптический тракт второй съемочной системы имеют общий участок, включающий в себя заднюю фокальную плоскость первой съемочной системы и заднюю фокальную плоскость второй съемочной системы. В соответствии с еще одним возможным вариантом осуществления, взятым отдельно или в сочетании с одним или обоими предшествующими возможными вариантами, глубина (DOF1) резко изображаемого пространства первой съемочной системы по меньшей мере в десять раз больше, чем глубина (DOF1) резко изображаемого пространства второй съемочной системы.
Посредством данного способа можно получать пространственную геометрическую информацию, связанную с (первой) базовой поверхностью и с наклонной поверхностью (или второй отсчетной поверхностью) трехкоординатной мишени, что дает возможность на основе указанной информации сделать вывод о положении в трех пространственных направлениях X, Y и Z первого объекта относительно второго объекта. Во-первых, будет выполнена трехкоординатная привязка положения мишени по отношению к первому объекту, и трехкоординатная привязка положения оптической системы по отношению ко второму объекту.
Важно отметить, что, согласно одному варианту осуществления, экспозиция или формирование изображения каждой съемочной системой оптической системы выполняется без фокусировки соответствующей съемочной системы. Действительно, именно положение (по трем координатам) съемочной системы относительно объекта, на который съемочная система смотрит (а, следовательно, как положение первой съемочной системы относительно базовой поверхности, так и положение второй съемочной поверхности относительно наклонной поверхности мишени) и оптические свойства, а, в частности, сильно различающаяся глубина резко изображаемого пространства съемочных систем, принадлежащих оптической системе, делает возможным одновременное формирование двух изображений: соответственно, базовой поверхности и наклонной поверхности. Анализ этих двух изображений (даже двух серий изображений) дает возможность получить информацию о положении мишени относительно оптической системы по координате X (данное направление X соответствует, например, высоте), по координате Y (данное направление Y соответствует, например, горизонтальному боковому смещению) и по координате Z (данное направление Z соответствует, например, главному горизонтальному расстоянию), а следовательно информацию по трем координатам о взаимном расположении первого объекта, который несет на себе трехкоординатную мишень, и второго объекта, который несет на себе оптическую систему.
Согласно одному варианту осуществления, после размещения трехкоординатной мишени на первом объекте и размещения оптической системы на втором объекте выполняют дополнительный этап определения пространственного положения мишени в координатах X, Y и Z относительно первого объекта посредством оптической системы.
Согласно одному возможному варианту осуществления, второй участок плоской базовой поверхности разбит на ряд локальных зон, размещенных на первом участке, при этом первое изображение, формируемое первой съемочной системой, дает возможность определять положение локальных зон второго участка на базовой поверхности, что дает информацию об относительном расположении указанных локальных зон и первой съемочной системы, давая возможность выполнять относительное измерение в направлении Y и направлении X.
Согласно одному варианту осуществления, соответствующий изобретению способ представляет собой способ измерения в трехкоординатном пространстве станка положения держателя инструмента относительно держателя детали, при котором первым объектом является указанный держатель инструмента, а вторым объектом является указанный держатель детали, причем перед указанным этапом одновременной съемки посредством оптической системы выполняют дополнительный этап, на котором:
- держатель инструмента и держатель детали располагают на одной линии в главном направлении Z так, чтобы рабочая грань трехкоординатной мишени была расположена в оптическом тракте оптической системы.
Согласно другому возможному варианту осуществления, оптическое устройство также содержит третью съемочную систему, расположенную на держателе инструмента и выполненную с возможностью регистрации ориентации рабочей грани мишени и/или углового положения держателя инструмента.
Краткое описание чертежей
Примеры реализации изобретения указаны в его описании, иллюстрированном прилагаемыми чертежами, на которых:
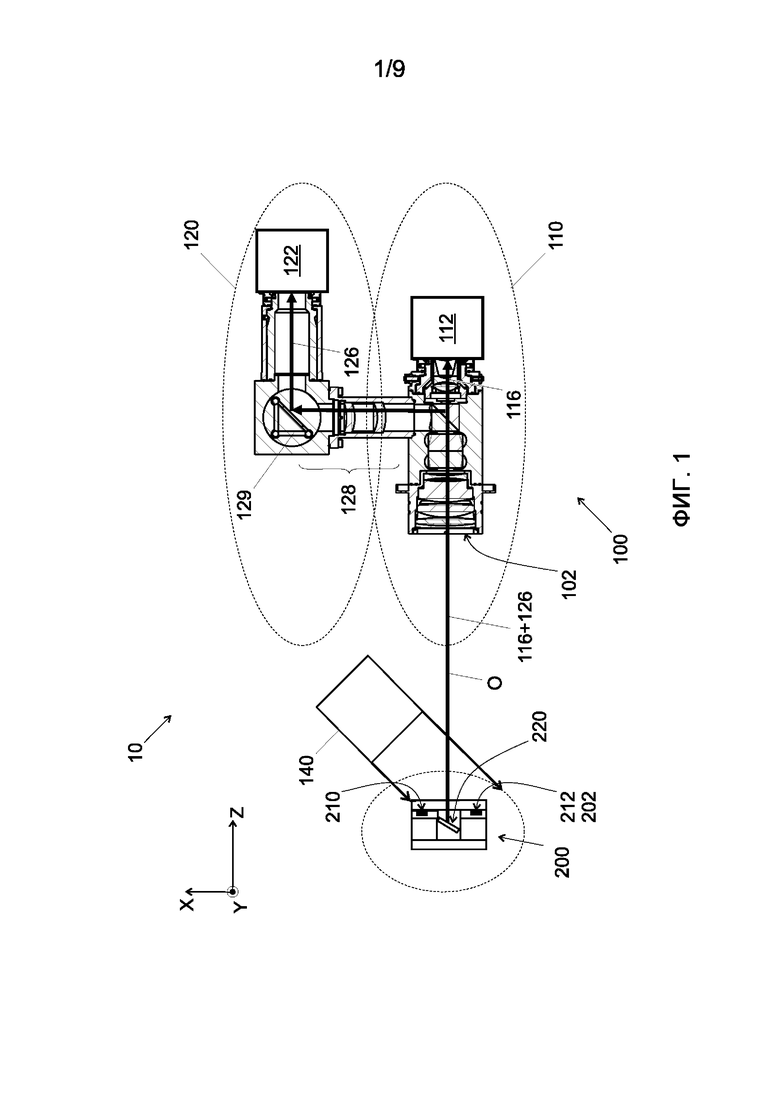
фиг. 1 изображает трехкоординатное измерительное устройство, которое содержит соответствующую изобретению трехкоординатную мишень и оптическую систему;
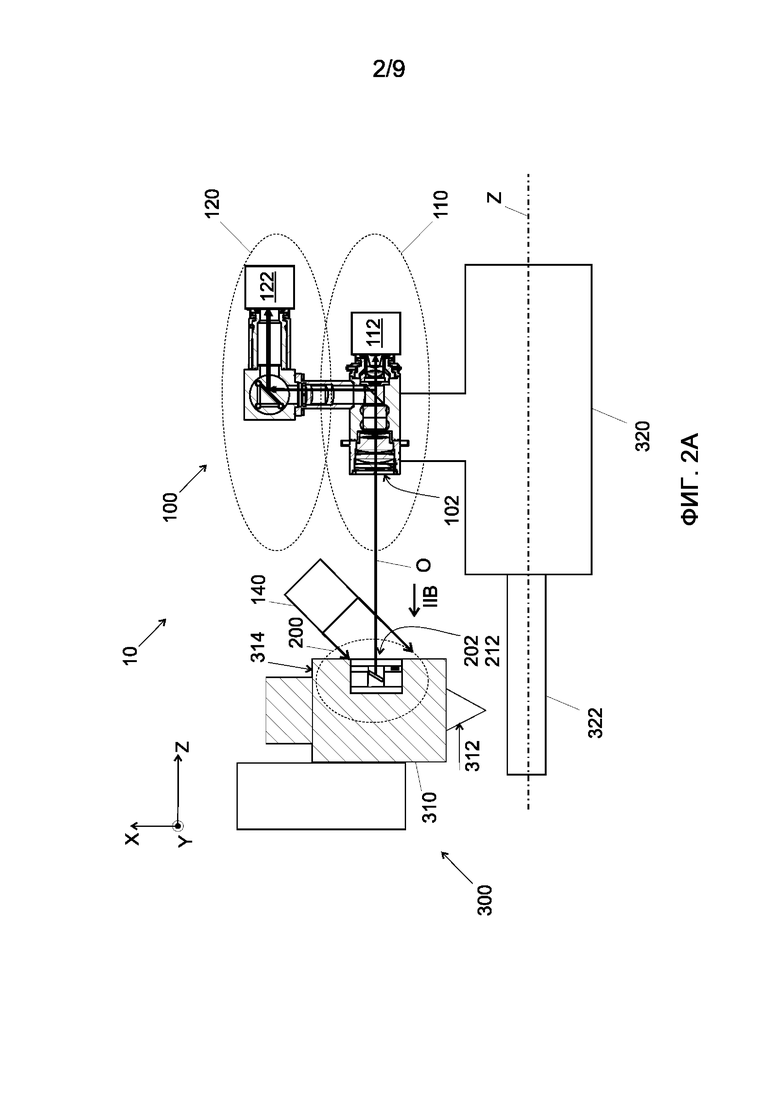
фиг. 2А иллюстрирует применение трехкоординатного измерительного устройства фиг.1 в станке для измерения в пространстве положения держателя инструмента относительно держателя детали (который также называют шпинделем для материала);
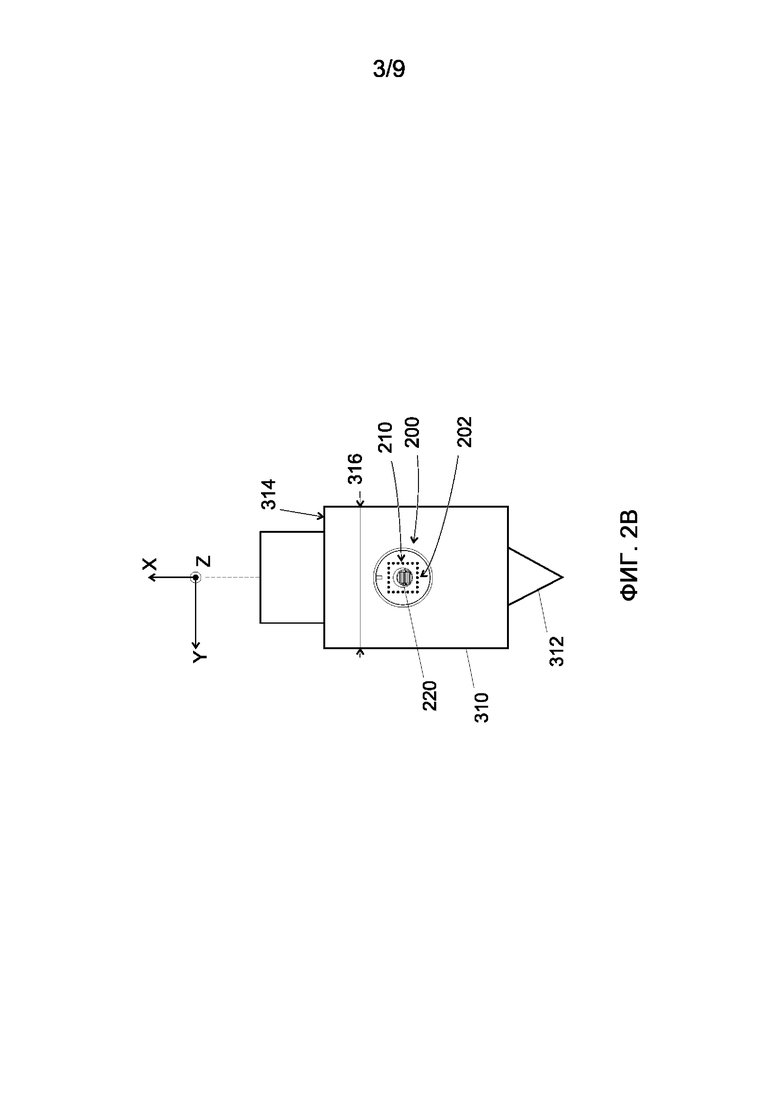
фиг. 2 В изображает часть фиг. 2А, соответствующую держателю инструмента с трехкоординатной мишенью, если смотреть в направлении IIB фиг. 2А,т.е. в направлении Z так, как это «видит» оптическая система, когда мишень направлена в сторону оптической системы;
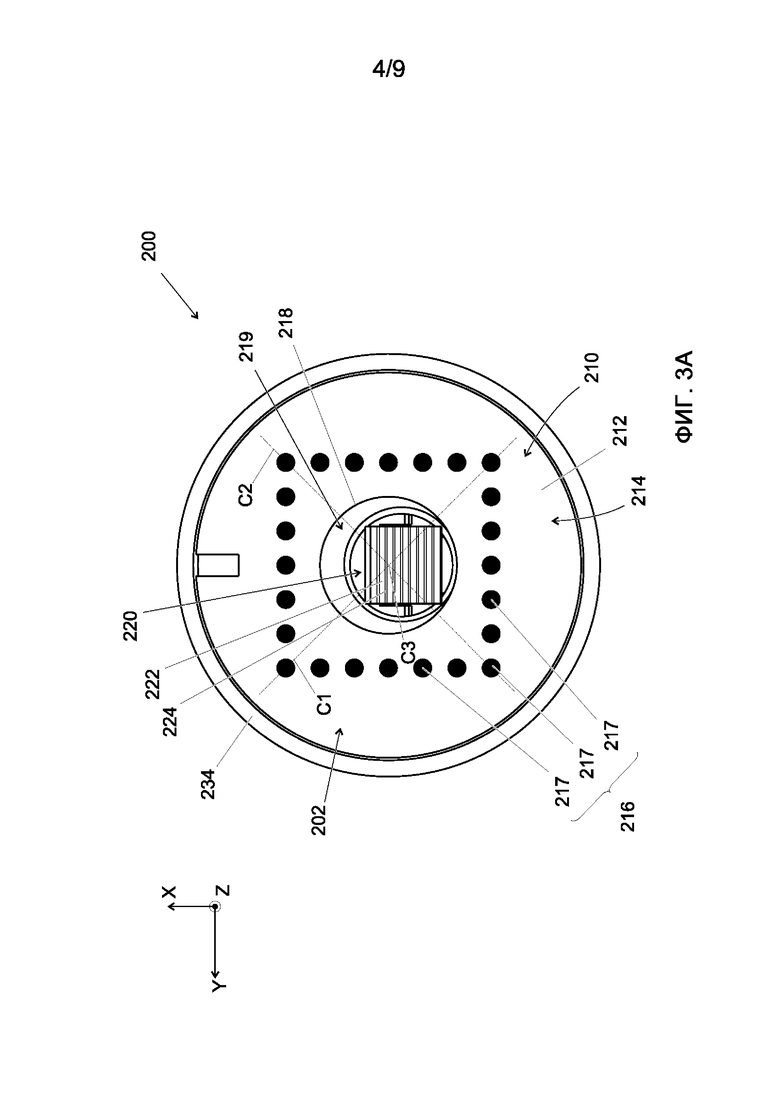
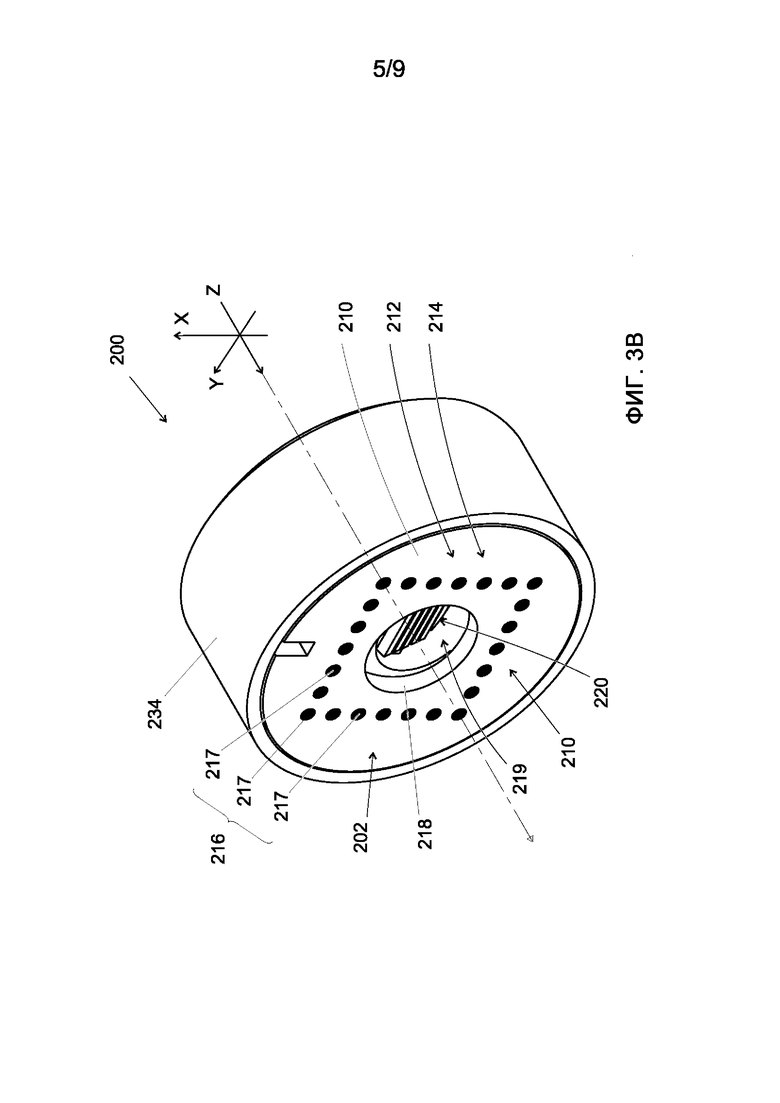
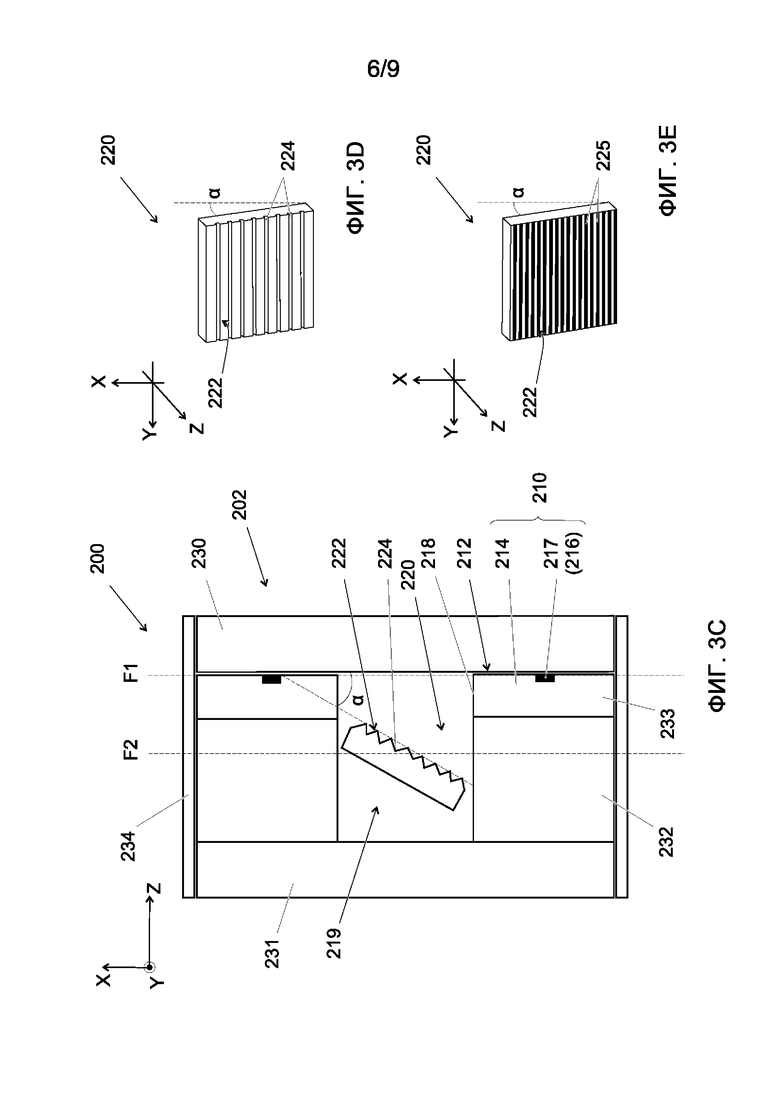
фиг. 3А, 3 В и 3С представляют три проекции, иллюстрирующие конструкцию трехкоординатной мишени, соответствующей изобретению, соответственно, фронтальную проекцию, аксонометрическую проекцию и вид в разрезе; а фиг. 3D и 3Е в аксонометрии изображают вторую структуру мишени, соответствующей фиг. 3А, 3 В и 3С согласно варианту осуществления;
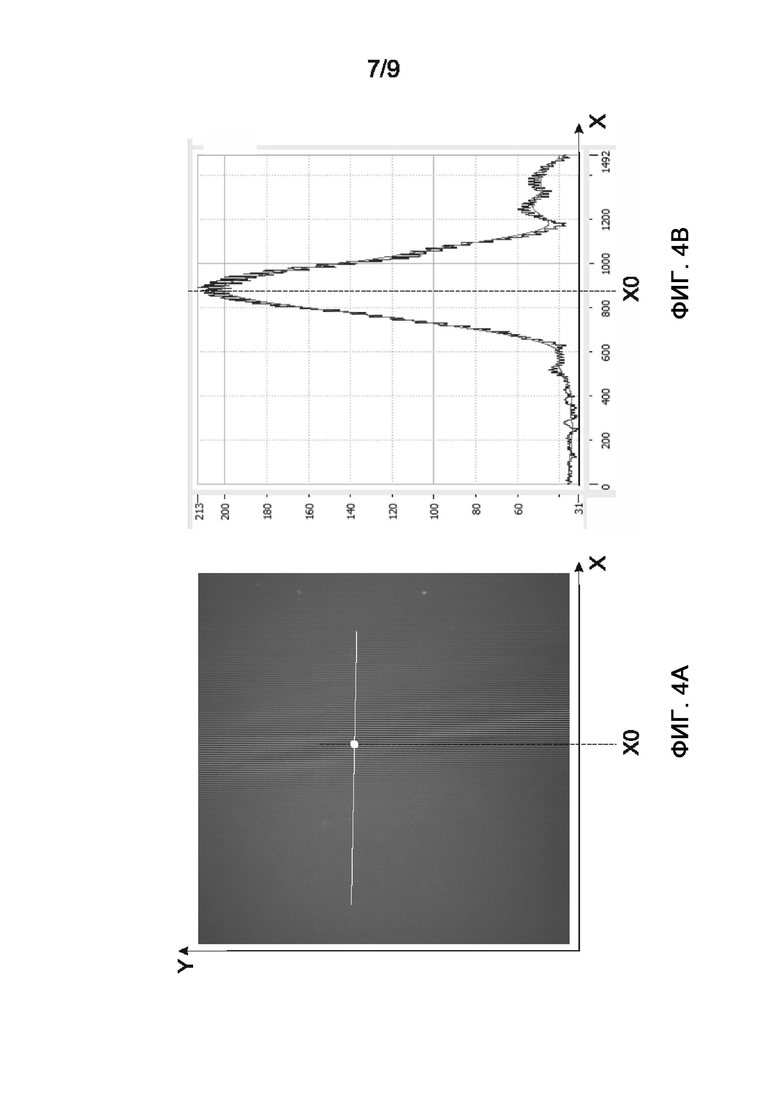
фиг. 4А и 4В иллюстрируют обработку изображения, сформированного второй съемочной системой оптической системы;
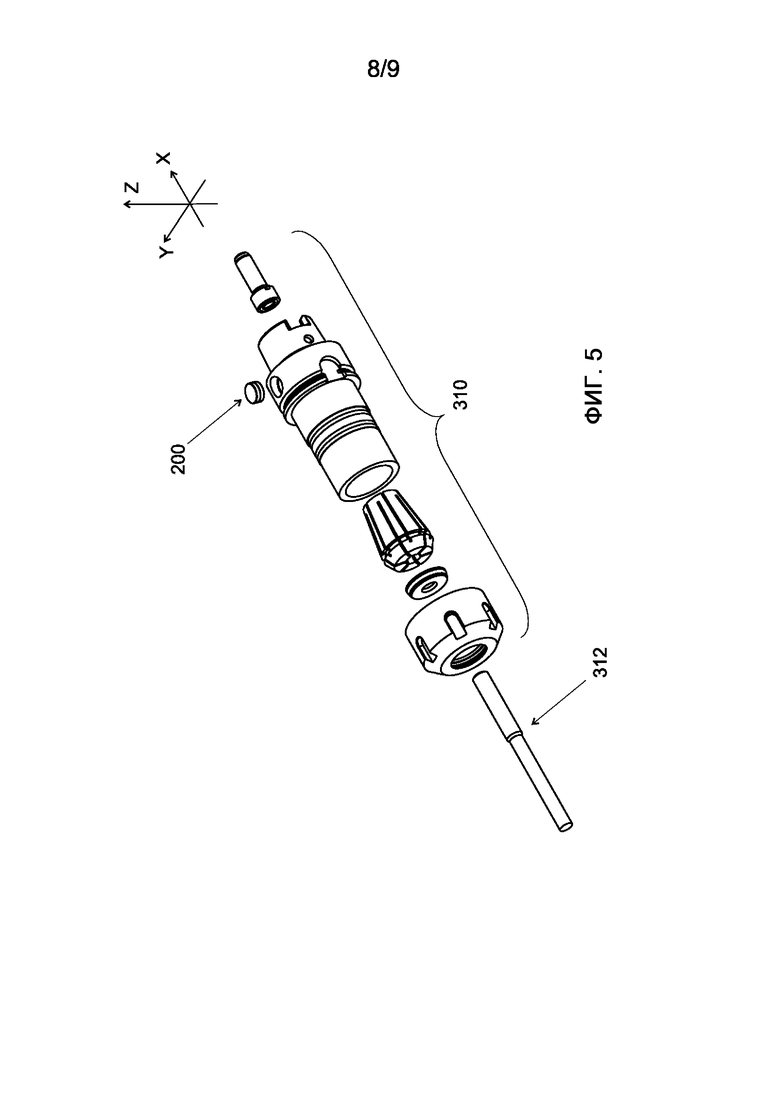
фиг. 5 в аксонометрии и с пространственным разделением деталей изображает держатель инструмента, оснащенный трехкоординатной мишенью, соответствующей изобретению;
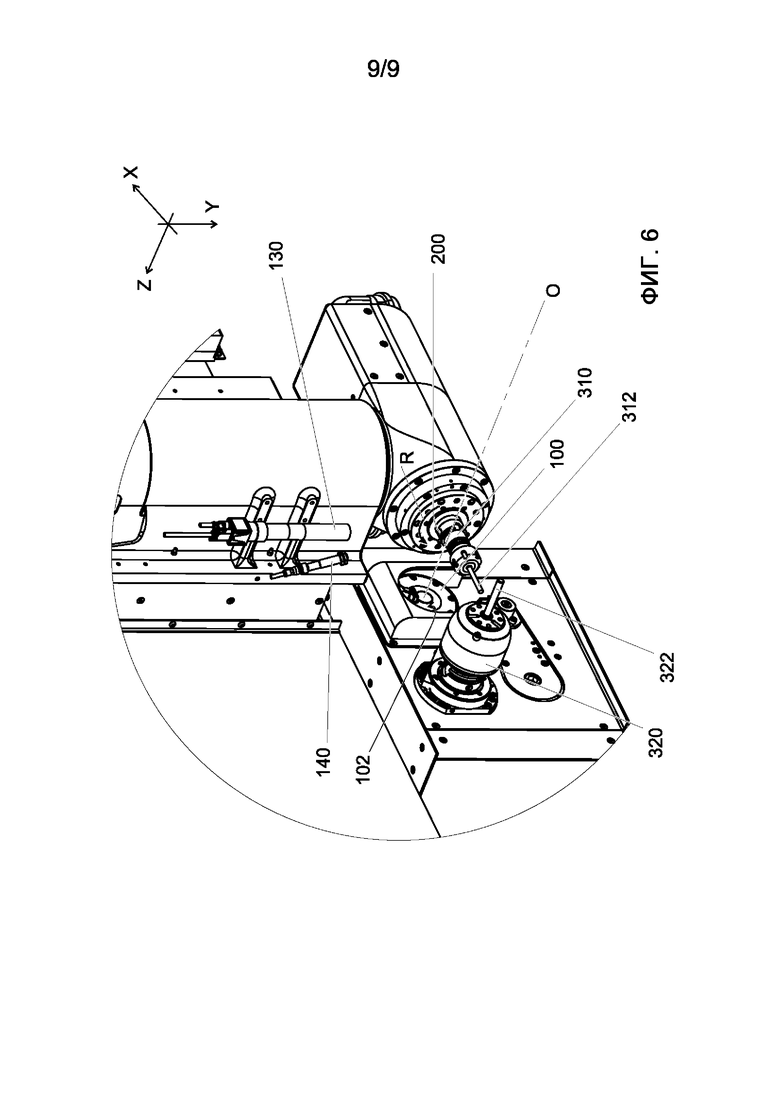
фиг. 6 иллюстрирует установку трехкоординатного оптического измерительного устройства на держателе инструмента.
Осуществление изобретения
На фиг. 1 изображено оптическое устройство 10, содержащее оптическую систему 100 и трехкоординатную (объемную) мишень 200, которые могут взаимодействовать друг с другом в целях выполнения измерения взаимного положения мишени 200 и оптической системы 100 по трем координатам. Фактически, в данном положении измерения мишень 200 ориентирована в направлении оптической системы 100 параллельно основной оси, образующей главное горизонтальное направление Z. С этой целью на выходе оптической системы 100 тракт О оптического луча ортогонален рабочей грани 202 мишени 200.
Мишень 200 будет далее описана согласно фиг. 1, 3А, 3 В и 3С. Мишень 200 имеет вид таблетки цилиндрической формы с круглым поперечным сечением (мишень может иметь квадратное или иное сечение), у которой одна сторона образует рабочую грань 202 для выполнения измерений. Следовательно, для осуществления измерений данную рабочую грань 202 поворачивают в направлении оптической системы 100, в частности, в направлении входной стороны 102 оптической системы 100, при этом ось Z, соответствующая главному направлению (на фигурах горизонтальному направлению), отделяет рабочую грань 202 от входной стороны 102 оптической системы 100.
Поверхность рабочей грани 202 мишени 200 поделена между первой структурой 210 и второй структурой 220. Первая структура 210 содержит плоскую базовую поверхность 212, которая является гладкой и поделена между первым участком 214, который является диффузно отражающим, и вторым участком 216, который является зеркально отражающим. Согласно одному варианту осуществления, первый участок 214 покрыт диффузно отражающим слоем, например, сульфатом бария BaSO4, а второй участок 216 сформирован зеркально отражающим слоем, например, слоем хрома. Согласно изображенному варианту осуществления, второй участок 216 выполнен в виде нескольких локальных зон 217 в форме кругов, образующих «островки», расположенные внутри первого участка 214, который является сплошным. Указанные локальные зоны 217 могут быть другого вида, например, могут иметь вид сегментов или «островков» другой формы нежели круговой. Указанные локальные зоны 217 вместе образуют геометрическую фигуру - одну из следующего перечня: четырехугольник, параллелограмм, прямоугольник, квадрат, ромб, правильный многоугольник и окружность. Данная геометрическая фигура может быть фигурой с центральной симметрией. На фиг. 3А и 3 В двадцать четыре круглые локальные зоны 217 расположены в виде квадрата. Назначение первой структуры 210 заключается в точном распознавании центра С3 с использованием стандартных видео средств. В случае фигуры типа «квадрат» две диагонали С1 и С2 указанного квадрата пересекаются в его центре. Следует отметить, что при измерении положения, как представлено на фиг. 1-3 и 5, базовая поверхность 212 расположена параллельно направлениям X и Y, соответственно формируя вертикальное направление (ось) и поперечное горизонтальное направление (ось) в случае такого расположения, какое показано.
Вторая структура 220 содержит поверхность 222, которая наклонена относительно базовой поверхности 212; при этом данная наклонная поверхность 222 является практически плоской, причем срединная плоскость данной наклонной поверхности образует относительно базовой поверхности 212 острый угол а, лежащий в диапазоне 10° - 80°, например, угол 20° - 30°, а предпочтительно угол порядка 25° (см. фиг. 3С).
Согласно одному варианту осуществления, данная наклонная поверхность 222 не является гладкой, а содержит элементы 224 рельефа, которые создают неровности поверхности, которые являются либо случайными, либо обладают заданной геометрией, например, вместе образуют решетку или сетку линий, таким образом составляют структурированную решетку (не показана) или структурированную сетку линий (см. фиг. 3D).
Такие элементы 224 рельефа могут быть в виде выступов или в виде углублений, т.е. могут быть отнесены назад относительно срединной плоскости наклонной поверхности 222, в частности, в форме небольшой шероховатости или любой другой неоднородности поверхности. Такие элементы 224 рельефа могут присутствовать на всей наклонной поверхности 222. Такие элементы рельефа могут быть равномерно распределены по всей наклонной поверхности 222. Например, указанные элементы 224 рельефа могут образовывать линию, которая ограничивает рисунок решетки или сетки, или, в более общем случае, структурированную поверхность или шероховатую поверхность, которая делает возможным получение достаточного рассеяния света, отраженного от наклонной поверхности 222. Наклонная поверхность 222 второй структуры 220, к примеру, покрыта одним из следующих элементов: травленой сеткой или структурированной решеткой, у которой расстояние (шаг) между элементами лежит в интервале 5-100 мкм, в частности в интервале 5-50 мкм, в том числе 8-15 мкм, например, имеет порядок 10 мкм.
Например, данная наклонная поверхность 222 выполнена из неполированного кремния или из керамики, или из неполированного металла или стекла, или из любого другого материала, который позволяет получать структуру, при этом элементы 224 рельефа получены посредством фотолитографии, путем станочной обработки со снятием стружки, путем непосредственного формирования рисунка (письма), или любым другим способом, который позволяет сформировать структуру. Указанные элементы 224 рельефа образуют, к примеру, углубления и/или выступы, которые соответственно отнесены назад от срединной плоскости и/или вынесены вперед за пределы срединной плоскости на несколько микрон или на несколько десятков микрон, в частности, на 0,5-50 мкм.
Согласно другому варианту осуществления, как показано на фиг. 3Е, данная наклонная поверхность 222 является гладкой и содержит сетку линий хрома или иного материала, обеспечивающего зеркальное отражение указанным линиям хрома, которые образуют зеркальные элементы 225. Указанные зеркальные элементы 225 в форме линий расположены параллельно друг другу. В измерительном положении указанные зеркальные элементы 225 в форме линий или полосок расположены параллельно плоскости Y, Z, так что вдоль наклонной поверхности в направлении Z указанные линии встречаются одна за другой (то же самое наблюдается, если двигаться в направлении X). Подложка, образующая пластину второй структуры 220, может быть выполнена из различных материалов, включая стекло или кремний, с диффузно отражающим слоем на наклонной поверхности 222, выполненным, например, из сульфата бария BaSO4, который чередуется с зеркальными элементами 225, или же, который покрывает всю наклонную поверхность, а зеркальные элементы 225 при этом расположены поверх данного диффузно отражающего слоя. Согласно примеру варианта осуществления, указанные зеркальные элементы 225 в форме линий образуют сетку с шагом 25 мкм. При этом данные линии (в частности, из хрома) имеют ширину 12,5 мкм равную ширине промежутков между линиями или участков диффузного отражения, которые также имеют форму линий или полос шириной 12, 5 мкм. В соответствии с другим вариантом осуществления, используется шаг 10 мкм или более, в общем шаг в диапазоне 5-50 мкм. Следует отметить, что зеркальные элементы 225, которые чередуются с остальной поверхностью, обеспечивающей диффузное отражение, могут иметь форму иную нежели сплошные линии или сегменты, образующие полосы; в частности это могут быть прерывистые линии, фигуры типа пунктирных границ, кругов, треугольников или любых других геометрических форм.
Согласно варианту осуществления, который не представлен на чертежах, наклонная поверхность 222 второй структуры 220 несет на себе область, которая выпячивает вперед элементы 224 рельефа в форме небольших гребней или клиньев, которые распределены в виде взаимно параллельных рядов, при этом элементы 224 рельефа взаимно смещены от одного ряда к другому, чтобы получилась ступенчатая фигура. Согласно другому варианту осуществления, который не представлен на чертежах, наклонная поверхность 222 второй структуры 220 несет на себе выступающие элементы 224 рельефа в форме сегментов, которые являются параллельными друг другу и равноудаленными и соответствуют двум сериям, пересекающимся под углом 90° друг к другу. Такой набор элементов 224 рельефа образует решетчатый рисунок. Следует отметить, что данная решетка может быть сформирована двумя сериями взаимно параллельных сегментов, которые пересекаются друг с другом под углом, отличающимся от 90°. На фиг. 3А, 3 В, 3С и 3D наклонная поверхность 222 второй структуры 220 несет элементы 224 рельефа, которые утоплены в виде серии сегментов, которые параллельны друг другу и расположены друг от друга на равных расстояниях в направлении X: данные элементы 224 рельефа образуют в этом случае канавки. Следовательно, направление X ортогонально направлению сегментов, образующих элементы 224 рельефа.
Следовательно, в варианте осуществления, показанном на фиг. 3Е, наклонная поверхность 222 второй структуры 220 покрыта сеткой зеркальных линий 225, а именно, взаимно параллельных сплошных полос, поверхность которых обладает свойством зеркального отражения.
Таким образом, в некоторых из вышеупомянутых случаев, и, в частности, представленных на фиг. 3D и 3Е, наклонная поверхность 222 второй структуры 220 имеет бороздчатую структуру.
В соответствии с вариантами осуществления, представленными для мишени 200, таблетка, ограничивающая мишень 200, содержит на своей рабочей грани 202 первую структуру 210, которая занимает большую часть площади рабочей грани 202, а внутри первой структуры 210 - зону, занимаемую второй структурой 220. В этой ситуации первая структура 210 окружает вторую структуру 220. Точнее, локальные зоны 217 второго участка 216 первой структуры 210 образуют квадрат, который окружает вторую структуру 220. В соответствии с одним возможным условием, и в случае вариантов осуществления мишени 200, представленных на чертежах, первая структура 210 и вторая структура 220 расположены на рабочей грани 202 концентрично друг другу. Более того, как в представленных вариантах, первая структура 210 определяет границу окна 218 для корпуса 219, вмещающего в себе вторую структуру 220, которая, к примеру, размещена на пластине, у которой имеется наклонная поверхность 222. Когда пластина помещена в корпус 219 первой структуры 210, ее наклонная поверхность 222 повернута в направлении наружу из корпуса 219, в сторону окна 218. В данном конкретном случае вторая структура 220 расположена в корпусе 219 так, что наклонная поверхность 222 отнесена назад относительно базовой поверхности первой структуры 210: это означает, что наклонная поверхность 222, а, следовательно, и вторая структура 220 расположены сзади, позади плоскости, ограниченной базовой поверхностью 212 (относительно главного направления Z, см. фиг. 3 В) в корпусе 219, и отнесены назад, например, на 0,05-2 мм или приблизительно на 0,15 мм. Согласно другому возможному варианту, который не представлен на чертежах, вторую структуру 220 располагают впереди - спереди от плоскости, ограниченной базовой поверхностью 212. Согласно еще одному возможному варианту, который также не представлен на чертежах, вторую структуру 220 располагают с каждой стороны плоскости, ограниченной базовой поверхностью 212, а именно, часть наклонной поверхности 222 располагают позади, а другую часть наклонной поверхности 222 располагают спереди относительно базовой поверхности 212.
В целях защиты первой структуры 210 и второй структуры 220 от окружающей среды (пыли, масла, ударов и т.п.), как можно видеть на фиг. 3С, мишень 200 содержит защитную пластину 230 из прозрачного материала, в частности, стекло, закрывающее первую структуру 210 и вторую структуру 220 со стороны рабочей грани 202. В соответствии с одним возможным вариантом осуществления, как показано на фиг. 3С, мишень 200 содержит в виде пакета следующие элементы. Нижнюю стенку 231, поверх которой установлена верхняя пластина 232, в центре которой выполнен вырез, определяющий границы корпуса 219, граница которого со стороны рабочей грани 202 определена окном 218. Сверху верхняя пластина 232 прикрыта защитной пластиной 230, которая закрывает корпус 219. Все указанные элементы вместе окружены цилиндрической стенкой 234, которая удерживает всю мишень 200. Вторая структура 220 представляет собой, например, заключенную в корпус 219 кремниевую пластину с наклонной поверхностью 222 (которая несет на себе элементы 224 рельефа или зеркальные элементы 225), повернутую в направлении рабочей грани 202. Поверхность верхней пластины 232, обращенная в сторону рабочей грани 202, содержит отражающий слой 233 в виде двух зон, как это было рассмотрено выше в отношении первого участка 214 (поверхность диффузного отражения) и второго участка 216 (поверхность зеркального отражения), в частности в виде локальных элементов 217).
Кроме того, мишень 200 может быть оснащена средствами радиочастотной идентификации РЧИД (RFID, англ. Radio Frequency Identification) (не показаны), чтобы обеспечить возможность сохранения и считывания уникального идентификатора, и данных, касающихся мишени 200, и относящихся к первому объекту, на котором предположительно должна быть установлена мишень 200, в частности, держателя 310 инструмента (см. фиг. 5 и 6): например, справочной информации по держателю 310 инструмента и другой информации, связанной с использованием данного держателя инструмента (к примеру, его серийного номера, типа, его установки относительно центра материала держателя обрабатываемой детали, числа раз использования держателя инструмента и т.п.).
Далее, согласно фиг. 1, будет рассмотрена оптическая система 100, связанная с только что описанной мишенью 200, которые вместе образуют оптическое измерительное устройство 10, которое позволяет проводить измерение взаимного положения двух объектов по трем пространственным координатам. В частности, ортогональное пространство рассматривается в декартовой системе координат X, Y и Z, которая указана на чертежах. Данная оптическая система 100 предназначена для одновременной регистрации, за одну и ту же последовательность экспозиций (съемок) как изображения первой структуры 210 мишени 200, так и изображения второй структуры 220 мишени 200. Согласно настоящему описанию, данная одновременная съемка двух изображений осуществляется без настройки, что дает высокую скорость выполнения такой съемки. Другие свойства, связанные, в частности, с особой конструкцией мишени 200, которая была рассмотрена выше, также позволяют добиться максимальной точности. Трехкоординатное оптическое измерительное устройство 10, соответствующее настоящему изобретению, за 1/2 секунды или быстрее способно выполнять воспроизводимое измерение взаимного положения объектов с погрешностью 1 мкм или менее.
Оптическая система 100 содержит первую съемочную систему 110 и вторую съемочную систему 120. Согласно одному варианту осуществления, указанная оптическая система 100 устроена так, что разность между фокусным расстоянием второй съемочной системы 120 и фокусным расстоянием первой съемочной системы 110 лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность 212 от наклонной поверхности 222. Согласно другому варианту осуществления, глубина резко изображаемого пространства (DOF1) первой съемочной системы 110 гораздо больше, в частности, по меньшей мере в десять раз больше глубины резко изображаемого пространства (DOF2) второй съемочной системы 120. Например, превышение глубины резко изображаемого пространства DOF1 первой съемочной системы 110 над глубиной резко изображаемого пространства DOF2 второй съемочной системы 120 составляет 10-10000 раз, или 100-5000 раз. Среди разных возможных характеристик: DOF1 первой съемочной системы больше или равна 0,8 мм, или находится в интервале 0,5-5 мм, или в интервале 0,8-3 мм, или в интервале 1-2 мм. Также среди других возможных характеристик: DOF2 второй съемочной системы меньше или равна 0,1 мм, или находится в интервале 5-50 мкм, или в интервале 8-30 мкм, или в интервале 10-20 мкм.
Это позволяет первой съемочной системе 110 естественным образом и без иных настроек фокусироваться на всей базовой поверхности 212 первой структуры 210 в интервале расстояний между мишенью 200 и первой съемочной системой 110, которое может варьировать в пределах нескольких миллиметров.
Параллельно этому вторая съемочная система 120 может естественным образом и без иных настроек фокусироваться на участке наклонной поверхности 222 второй структуры 220, который находится на расстоянии от второй съемочной системы 120, которое соответствует фокусному расстоянию второй съемочной системы 120. Согласно одному возможному варианту, увеличение первой съемочной системы 110 меньше или равно увеличению второй съемочной системы 120.
Каждая съемочная система, соответствующая настоящему изобретению (первая съемочная система 110 и вторая съемочная система 120) соответствует оптической системе, в частности, центрированной оптической системе, содержащей набор оптических элементов, и систему получения изображений. Такая система получения изображений делает возможным получение фотографий и/или видео, и представляет собой, например, камеру или фотографический аппарат, в частности, цифровой фотоаппарат. Согласно одному возможному варианту осуществления, первая система 112 получения изображений первой съемочной системы 110 и вторая система 122 получения изображений второй съемочной системы 120 синхронизированы с целью одновременной регистрации первого изображения посредством первой съемочной системы 110, и второго изображения посредством второй съемочной системы 120.
Чтобы первая съемочная система 110 и вторая съемочная система 120 могли одновременно видеть мишень 200, у указанных систем имеется общий оптический тракт, который направлен вперед и берет начало от объекта, за которым ведет наблюдение оптическая система 100; в данном случае мишень 200 (см. фиг. 1 и 2) установлена на первом объекте, а оптическая система 100 установлена на втором объекте. С этой целью в положении выполнения измерений первая съемочная система 110 повернута в направлении рабочей грани 202 мишени 200, и образует съемочную систему, центрированную с мишенью 200, при этом второй съемочной системе 120 соответствует оптический тракт 126, который встречается с оптическим трактом 116 первой съемочной системы 110 (которая центрирована с мишенью 200) и образует съемочную систему, которая смещена относительно мишени 200 относительно оптической оси О оптической системы 100, и относительно общего участка оптических трактов 116 и 126, который центрирован с мишенью. Другими словами, оптический тракт съемочной системы, центрированный с мишенью 200, ориентирован по существу под прямым углом к базовой плоскости 212. Оптическая ось О совмещена со срединным лучом общего участка первого оптического тракта 116 и второго оптического тракта 126. На данном общем участке сегменты первого оптического тракта 116 и второго оптического тракта 126 взаимно параллельны, но не обязательно совмещены друг с другом.
В частности, как показано на фиг. 1 и 2, первая съемочная система 110 повернута в направлении рабочей грани 202 мишени 200, другими словами, ориентирована под прямым углом к рабочей грани 202 мишени 200. Это означает, что оптическая ось О и общий участок оптических трактов 116 и 126 центрированы с мишенью 200 и расположены под прямыми углами к рабочей грани 202 (а, следовательно, к базовой поверхности 212) мишени 200. При такой конфигурации, как можно видеть на фиг. 1 и 2, оптическая ось О и общий участок оптических трактов 116 и 126 параллельны главному направлению Z, и ортогональны к поперечным направлениям X и Y, и плоскости X, Y.
На общем участке оптических трактов 116 и 126 оптические лучи по меньшей мере частично сливаются друг с другом, или просто параллельны друг другу. У второй съемочной системы 120, которая является смещенной, имеется участок оптического тракта 126 (внутри второй съемочной системы 120), который в предпочтительном случае параллелен оптической оси О. Данный внутренний участок оптического тракта 126 связан, или, точнее, встречается с оптическим трактом 116 первой съемочной системы 110; при этом его центрирование осуществляется специализированным оптическим модулем 128, содержащим катоптрическую (отражательную) оптическую систему, такую как зеркало 129. Таким образом, вход смещенной съемочной системы (в данном случае второй съемочной системы 120) связан с оптическим трактом центрированной оптической системы (в данном случае первой съемочной системы 110).
Более обобщенно можно сказать, что одна из съемочных систем - первая система 110 или вторая система 120 - повернута в направлении рабочей грани 202 мишени 200, и образует съемочную систему, центрированную с мишенью 200, а у другой из указанных съемочных систем имеется оптический тракт 126, который встречается с оптическим трактом 116 съемочной системы, центрированной с мишенью 200, и образует смещенную съемочную систему. Это означает, что указанная другая съемочная система имеет оптическую ось, которая проходит через наклонную поверхность 222, т.е. через вторую структуру 220 мишени 200. Также, первая съемочная система 110 и вторая съемочная система 120 расположены параллельно друг другу. Кроме того оптическая система также содержит оптический модуль 128 (например, с катоптрической оптической системой, такой как зеркало), расположенный между первой съемочной системой 110 и второй съемочной системой 120, и выполненный с возможностью отклонения части световых лучей, проходящих по меньшей мере через часть одной из съемочных систем (первой или второй) в направлении другой из съемочных систем (первой или второй). И наоборот, оптическая система 100 устроена так, что оптический путь от наблюдаемого объекта (мишени 200 на фиг. 1 и 2) за счет оптической системы 100 проходит по меньшей мере через часть одной из съемочных систем - первой съемочной системы 110 или второй съемочной системы 120 - (первой съемочной системы 110 на фиг. 1 и 2), прежде чем достичь другой из указанных съемочных систем (второй съемочной системы 120 на фиг. 1 и 2).
Согласно одному варианту осуществления, фокусное расстояние второй съемочной системы 120 больше фокусного расстояния первой съемочной системы 110. Например, разность фокусных расстояний второй съемочной системы 120 и первой съемочной системы 110 находится в интервале от 0.5 мм до 5 мм.
Согласно одному варианту осуществления, увеличение первой съемочной системы 110 меньше или равно увеличению второй съемочной системы 120. Например, увеличение первой съемочной системы составляет 0,8-1 увеличения второй съемочной системы 120. К примеру, увеличение первой съемочной системы лежит в интервале 0,3-0,8 или 0,4-0,6 увеличения второй съемочной системы, а предпочтительно составляет около 0,5 увеличения второй съемочной системы 120.
В варианте осуществления, изображенном на фиг. 1 и 2, оптическая система 100 также содержит осветитель 140, ориентированный в направлении трехкоординатной мишени 200. Осветитель 140 расположен так, чтобы обеспечить боковое освещение мишени 200. С этой целью данный осветитель 140 расположен со смещением от центра, и наклонен относительно оптического тракта 116+126 оптической системы 100. В частности, световые лучи от осветителя 140 образуют с базовой поверхностью 212 мишени угол, так что их зеркальное отражение от отражающих поверхностей мишени, и в частности, локальных зон 217, формирует отраженные световые лучи, которые не попадают в оптическую систему 100. Аналогично, когда наклонная поверхность 222 содержит зеркальные элементы 225, отражение световых лучей, приходящих от осветителя 140, от указанных зеркальных элементов 225 не попадает в оптическую систему 100.
Согласно одному варианту осуществления, первая используемая съемочная система 110 и вторая используемая съемочная система являются телецентрическими. В качестве напоминания, телецентричность это характеристика оптической системы, согласно которой все основные лучи (центральный луч каждого пучка), которые проходят через систему, являются практически коллимированными и параллельными оптической оси. В случае телецентрической оптики понятие глубины резко изображаемого пространства заменяется понятием рабочего расстояния. Согласно другому варианту осуществления, первая используемая съемочная система 110 и вторая используемая съемочная система 120 не являются телецентрическими или обе не являются телецентрическими. В случае, когда обе системы являются телецентрическими, они также могут быть использованы для измерения геометрических характеристик инструмента, расположенного на держателе 310 инструмента.
Далее, согласно фиг. 2А - 6, будет рассмотрен способ трехкоординатного оптического измерения расстояний между мишенью 200 и оптической системой 100 в случае металлорежущего станка, у которого станочный модуль 300 содержит оптическое устройство 10. Отсчетными направлениями X, Y и Z являются отсчетные направления станочного модуля, в частности система координат станочного модуля, которая дает вертикальное направление X (или первую поперечную ось), главное горизонтальное направление Z (или главную ось) и поперечное горизонтальное направление Y (или вторую поперечную ось). Мишень 200 помещена на держатель 310 инструмента, который служит в качестве первого объекта (см. фиг. 5): держатель 310 инструмента проходит в главном горизонтальном направлении, которое соответствует оси X, с возможностью вращения вокруг оси X. С этой целью, часть держателя 310 инструмента, например, зажим, содержит углубления на своей периферической поверхности, обычно предназначенные для установки приспособления, обеспечивающего захват/освобождение зажима, и в которые может быть помещена мишень 200, возможно связанная с микросхемой RFID, о чем говорилось ранее. Кроме того, оптическая система 100 установлена на держателе 320 детали (заготовки), который служит в качестве второго объекта (см. фиг. 6) и принимает в себя заготовку 322, подлежащую станочной обработке. Держатель 320 детали проходит вдоль своего главного горизонтального направления, соответствующего оси Z, и имеет возможность вращения вокруг оси Z. Затем, перед этапом станочной обработки, держатель 320 детали и держатель 310 инструмента ставят в близкое друг к другу положение, так чтобы инструмент 312 и подлежащая обработке деталь находились в близости друг к другу, в позиции измерения взаимного расположения. Расположение мишени 200 на держателе 310 инструмента и расположение оптической системы 100 на держателе 320 детали позволяет в данной позиции измерения взаимного расположения расположить мишень 200, а точнее базовую поверхность 202, на продолжении оптической оси О оптической системы 100 (следует отметить, что указанная оптическая ось О параллельна направлению Z). Таким образом, базовая поверхность 202 мишени 200 повернута в направлении входной стороны 102 оптической системы 100.
Как представлено на фиг. 6, оптическое устройство 100 также содержит третью съемочную систему 130, расположенную на держателе 310 инструмента, и выполненную с возможностью регистрации ориентации рабочей грани 202 мишени 202 или углового положения вращающейся части держателя 310 инструмента, в частности, относительно оси X. Предварительный дополнительный этап позиционирования мишени 200 выполняют перед этапом одновременной съемки при помощи оптической системы 100, согласно которому:
- держатель 310 инструмента и держатель 320 детали располагают так, чтобы рабочая грань 202 пространственной мишени 200 оказалась на оптической оси О оптической системы 100. В частности, третья съемочная система 130 может быть использована для регистрации углового положения мишени 200 относительно вращающейся части держателя 310 инструмента, а следовательно относительно оси X, что делает возможным производить изменение (если необходимо) углового положения вращающейся части держателя 310 инструмента (см. стрелку R на фиг. 6), и таким образом расположения мишени 200 так, чтобы рабочая грань 202 была повернута в направлении оптической системы 100. Позиция измерения взаимного расположения получается, когда мишень 200 ориентирована в направлении оптической системы 100, как было рассмотрено выше в отношении фиг 1 и 2А: в этом случае направление Z проходит между мишенью 200 и оптической системой 100.
При первом использовании оптического устройства 10 (а именно, оптической системы 100 и связанной с ней мишени 200), соответственно установленной на держателе 320 детали (или в более общем смысле - на втором объекте), и на держателе 310 инструмента (или в более общем смысле - на первом объекте), должен быть выполнен предварительный дополнительный этап пространственной привязки положения мишени 200 относительно держателя 310 инструмента (в более общем смысле - первого объекта), которая увязывает мишень 200 с тремя направлениями X, Y и Z. Следует отметить, что очевидно параметры оптической системы 100, а именно, первой съемочной системы 110 и второй съемочной системы 120 известны, включая их фокусные расстояния. На это стадии можно отметить, что, когда рабочее пространство станочного модуля 300 ограниченно и поддерживается при постоянной температуре, его тепловая стабильность обуславливает стабильность размеров оптического устройства 10 и, следовательно, его параметров.
Стоит напомнить, что трехкоординатное измерение взаимного расположения мишени 200 и оптической системы 100 используется в случае металлорежущего станка, чтобы конечном итоге знать в форме координат X, Y и Z пространственное взаимное расположение держателя 310 инструмента (или в более общем смысле - первого объекта) и держателя 320 детали (или в более общем смысле - второго объекта).
В данном описании три направления X, Y и Z представляют собой, например, оси станочного модуля 300 станка. Таким образом, направление Z может быть определено в качестве главной оси, а именно главного горизонтального направления, отделяющего первый объект (держатель 310 инструмента) от второго объекта (держателя 320 детали). Направление X может быть определено в качестве вертикального направления (или в более общем смысле - первой поперечной оси), а направление Y может быть определено в качестве поперечного горизонтального направления (или в более общем смысле - второй поперечной оси. Согласно одному варианту осуществления, держатель 310 инструмента вращается вокруг оси параллельной направлению X.
На данном этапе пространственной привязки положения мишени 200 по трем координатам X, Y и Z (калибровки оптического устройства 10), например, при схеме, соответствующей фиг. 2А и 2В, приводится в действие съемка посредством оптической системы 100, которая приводит, с одной стороны, к формированию первой системой 112 получения изображений, принадлежащей первой съемочной системе 110, первого изображения всей рабочей грани 202 мишени 200 со всей базовой поверхностью 212, которая изображается резко, а с другой стороны - к формированию второй системой 122 получения изображений, принадлежащей второй съемочной системе 120, второго изображения всей наклонной поверхности 222 мишени 200 с единственной резко изображаемой зоной в форме горизонтальной полосы. Указанное первое изображение содержит изображение локальных зон 217, которые в данном случае ограничивают собой квадрат (см. фиг. 3А), так что обработка первого изображения дает диагонали С1 и С2 квадрата, и делает возможным определение центра С3 квадрата. Таким образом, поскольку положение оптической оси О на первом изображении известно, определение положения центра С3 квадрата дает возможность узнать в координатах X и координатах Y положение мишени 200 относительно оптической оси О, но также, с одной стороны, относительно точки 314 привязки в направлении X на держателе 310 инструмента, и, с другой стороны, относительно точки 316 привязки в направлении Y на держателе 310 инструмента. Фактически, как можно видеть на фиг. 2А и 2В, в качестве привязки в направлении X используется поверхность держателя 310 инструмента, которая ортогональна оси X, например, образована заплечиком на корпусе держателя 310 инструмента, который на первом изображении смотрится в виде линии, и поверхность которого образует точку 314 привязки в направлении X. Кроме того, как можно видеть на фиг. 2А и 2В, в качестве привязки в направлении Y используется габаритный размер держателя 310 инструмента вблизи мишени 200, который ортогонален оси X, и который в изображенном случае представляет собой ширину (параллельно направлению Y) держателя 310 инструмента вблизи мишени 200, например, диаметр, когда данная часть держателя 310 инструмента является цилиндрической с круговым сечением; данный размер (габарит) образует точку 316 привязки в направлении Y.
Параллельно производится обработка второго изображения, пример которого виден на фиг. 4А. Путем анализа локального контраста данного второго изображения (см. фиг. 4В, на которой представлены кривые контраста в зависимости от положения в координатах X) определяется положение Х0 резко изображаемой зоны второго изображения в вертикальном направлении X. Данный анализ выполняется посредством алгоритма, который дает возможность определить самые резко изображаемые пиксели изображения. Поскольку наклон наклонной поверхности 222 известен, то получают кривую соответствия между X и Z данной наклонной поверхности 222 конкретной для мишени 200. Благодаря данной кривой соответствия, знание положения Х0 (см. фиг. 4А и 4В) дает возможность отсюда получить положение Z0 наклонной поверхности 222 на оптической оси О, а, следовательно, положение по координате Z мишени 200 относительно оптической системы 100. Кроме того, положение по координате Z оптической системы 100 относительно держателя 320 детали известно из данных измерительной линейки (не показана), которая расположена вдоль оси X на держателе 320 детали, и которая поддерживает оптическую систему 100. Аналогично, положение по координате Z мишени 200 относительно точки 314 привязки держателя 310 инструмента известно.
Путем многократного выполнения данной операции, с каждым разом изменяя расстояние по координате Z держателя 320 детали относительно держателя 310 инструмента (например, путем уборки или подачи держателя 310 инструмента) можно таким образом реконструировать трехмерное изображение наклонной плоскости 222 мишени 200, и получить отсчетную базу, которая в декартовых координатах отображает наклонную поверхность 222 мишени 200 относительно держателя 310 инструмента. В конечном счете это все касается рабочей грани 202 мишени 200 (базовой поверхности 212 и наклонной поверхности 222), которая в пространстве привязана в трех направлениях X, Y и Z относительно держателя 310 инструмента.
Затем, всякий раз, когда это необходимо при операциях использования станочного модуля 300, оснащенного мишенью 200 и оптической системой 100, может быть выполнено фактическое измерение без разборки системы между моментами измерения, чтобы сохранить точность измерения пространственной привязки, которая была объяснена выше. С этой целью, к примеру, используют схему фиг. 2А. Если необходимо, то выполняют поворот держателя 310 инструмента вокруг его оси вращения, которая параллельна оси X (см. стрелку R на фиг. 6), чтобы центрировать мишень 200 с оптической системой 100. Затем запускают съемку посредством оптической системы 100, что приводит, с одной стороны, к формированию посредством первой системы 112 получения изображений первой съемочной системы 110 первого изображения всей рабочей грани 202 мишени 200 со всей базовой поверхностью 212, которая находится в поле резкости, а, с другой стороны, к формированию посредством второй системы 122 получения изображений второй съемочной системы 120 второго изображения всей наклонной поверхности 222 мишени 200 только с одной резко изображаемой зоной в форме горизонтальной полосы, соответствующей фокусному расстоянию второй съемочной системы 120. Анализ первого изображения дает возможность, как говорилось выше, определить центр С3 квадрата, образованного локальными элементами 217, и таким образом в координатах X и в координатах Y определить положение мишени 200 относительно оптической оси О, а также относительно держателя 310 инструмента. Анализ второго изображения, и, в частности, положения резко изображаемой зоны второго изображения (как на фиг. 2А) в направлении X дает возможность определить это положение в координатах Z, а следовательно расстояние мишени 200 относительно оптической системы 100. Фактически, что касается второго изображения, поскольку положение Z каждого пикселя изображения наклонной поверхности 222 относительно точек 314 и 316 привязки держателя 310 инструмента известно, есть возможность очень быстро измерять положение Z мишени 200 и, следовательно, держателя 310 инструмента.
Из вышеизложенного следует понимать, что указанным способом, исключительно путем анализа двух изображений, сформированных оптической системой 100, без потери времени на настройку или регулировку оптической системы 100 может быть очень быстро измерено положение мишени 200 относительно оптической системы 100 в координатах X, Y и Z, начиная от положения держателя 310 инструмента относительно держателя 320 детали. Это возможно благодаря тому, что известно положение оптической системы 100 относительно держателя 320 детали в координатах X, Y и Z.
Настоящее описание относится также к оптической системе для трехкоординатного измерения взаимного расположения первого объекта и второго объекта, на котором предположительно должна быть установлена указанная оптическая система, содержащая первую съемочную систему и вторую съемочную систему, у которых:
- глубина резко изображаемого пространства первой съемочной системы по меньшей мере в 10 раз больше, чем глубина резко изображаемого пространства второй съемочной системы, и
- оптическая система устроена так, что оптический тракт первой съемочной системы и оптический тракт второй съемочной системы имеют общий участок, содержащий заднюю фокальную плоскость первой съемочной системы и заднюю фокальную плоскость второй съемочной системы.
Настоящее описание относится также к способу для трехкоординатного оптического измерения в соответствии с тремя ортогональными направлениями X, Y и Z взаимного расположения первого объекта и второго объекта, которые установлены на одной линии и удалены друг от друга в главном направлении Z, при котором:
- предусматривают трехкоординатную мишень, образующую базу для отсчета положений и содержащую на рабочей грани:
• первую структуру, образующую плоскую базовую поверхность, поделенную по меньшей мере на:
- первый участок, поверхность которого обладает отражающими свойствами в соответствии с первыми параметрами отражения, и
-второй участок, поверхность которого обладает отражающими свойствами в соответствии со вторыми параметрами отражения, которые отличаются от первых параметров отражения, и
• вторую структуру, содержащую поверхность, которая наклонена относительно указанной плоской базовой поверхности;
- предусматривают оптическую систему, содержащую первую съемочную систему и вторую съемочную систему, у которых:
- глубина резко изображаемого пространства первой съемочной системы по меньшей мере в 10 раз больше, чем глубина резко изображаемого пространства второй съемочной системы, и
- оптическую систему выполняют, с одной стороны, так, что оптический тракт первой съемочной системы и оптический тракт второй съемочной системы имеют общий участок, содержащий заднюю фокальную плоскость первой съемочной системы и заднюю фокальную плоскость второй съемочной системы, а, с другой стороны, так, что разность фокусных расстояний второй съемочной системы и первой съемочной системы лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность от наклонной поверхности,
- указанную трехкоординатную мишень размещают на первом объекте так, что, с одной стороны, фокусное расстояние первой съемочной системы позволяет разместить фокус изображения первой съемочной системы на первой структуре мишени, а, с другой стороны, фокусное расстояние второй съемочной системы позволяет разместить фокус изображения второй съемочной системы на второй структуре мишени,
- указанную оптическую систему размещают на втором объекте,
- производят по меньшей мере одну экспозицию одновременно посредством первой съемочной системы, принадлежащей оптической системе, и посредством второй съемочной системы, принадлежащей оптической системе, и тем самым при каждой экспозиции, выполняемой посредством оптической системы, с одной стороны, первая съемочная система формирует первое изображение мишени, которое дает возможность определить на базовой поверхности положение второго участка относительно первого участка (или положение локальных зон на базовой поверхности), что дает, во-первых, первую часть информации о положении мишени относительно первой съемочной системы в направлении X, а, во-вторых, вторую часть информации о положении мишени относительно первой съемочной системы в направлении Y, а, с другой стороны, вторая съемочная система формирует второе изображение мишени, содержащее резко изображаемый участок, соответствующий местоположению наклонной поверхности второй структуры, что дает третью часть информации о расстоянии между мишенью и второй съемочной системой в направлении Z.
Как уже объяснялось ранее, тем самым оптическая система 100 синхронно формирует первое изображение и второе изображение. Кроме того, оптическая система 100 формирует первое изображение и второе изображение без выполнения регулировки, что дает возможность выполнять экспозицию незамедлительно и без потери времени.
Настоящее описание также относится к металлорежущему станку, содержащему вышеописанную оптическую мишень, при этом металлорежущий станок содержит описанную выше оптическую систему. Настоящее описание также относится к металлорежущему станку, содержащему станочный модуль, оснащенный держателем инструмента и держателем детали (заготовки), а также оптическим измерительным устройством для трехкоординатного измерения положения держателя инструмента относительно держателя детали; при этом оптическое измерительное устройство содержит указанную оптическую систему, установленную на держателе детали, и мишень, которая установлена на держателе инструмента и содержит рабочую грань, которая образует базу отсчета положений, и которая может быть расположена на оптической оси оптической системы. К примеру, указанное оптическое измерительное устройство выполнено с возможностью за один этап съемки мишени посредством оптической системы определять взаимное расположение держателя обрабатываемой детали и держателя инструмента по трем координатам. Также, согласно возможному варианту осуществления, мишень располагают так, чтобы задняя фокальная плоскость оптической системы совпадала с рабочей гранью мишени.
Перечень позиционных обозначений, использованных на чертежах
X Вертикальное направление (первая поперечная ось)
Y Боковое горизонтальное направление (вторая поперечная ось)
Z Главное горизонтальное направление, отделяющее первый объект от второго объекта (главная ось)
С1 Диагональ
С2 Диагональ
С3 Центр
α Угол наклона поверхности
R Стрелка, показывающая вращение держателя инструмента и мишени
10 Оптическая система
200 Трехкоординатная мишень
202 Рабочая грань
210 Первая структура
212 Базовая поверхность
214 Первый участок (с поверхностью диффузного отражения)
216 Второй участок (с поверхностью зеркального отражения)
217 Локальные зоны
218 Окно
219 Корпус
220 Вторая структура
222 Наклонная поверхность
224 Элементы рельефа
225 Зеркальные элементы
230 Прозрачная защитная пластина
231 Нижняя стенка
232 Верхняя пластина
233 Отражающий слой
234 Цилиндрическая стенка
100 Оптическая система
О Оптическая ось
102 Входной торец оптической системы
110 Первая съемочная система
DOF1 Глубина резко изображаемого пространства первой съемочной системы
F1 Задняя фокальная плоскость первой съемочной системы
112 Первая система получения изображения
120 Вторая съемочная система
F2 Задняя фокальная плоскость второй съемочной системы
DOF2 Глубина резко изображаемого пространства второй съемочной системы
122 Вторая система получения изображения
126 Оптический тракт второй съемочной системы
128 Оптический модуль с катоптрической оптической системой
130 Зеркало
140 Осветитель (боковой подсветки)
300 Станочный модуль
310 Держатель инструмента
312 Инструмент
314 Точка привязки держателя инструмента по координате X
316 Точка привязки держателя инструмента по координате Y
320 Держатель детали или шпиндель для материала - второй объект
322 Обрабатываемая деталь (материал)
Группа изобретений относится к трехкоординатной мишени 200, трехкоординатной системе имерений, системе для трехкоординатного оптического измерения и способу трехкоординатного оптического измерения расположения первого объекта относительно второго. Трехкоординатная мишень, которая может служить в качестве базы для отсчета положений, содержит на своей рабочей грани 202: первую структуру 210, образующую плоскую базовую поверхность 212, поделенную по меньшей мере на первый участок 214, поверхность которого обладает свойствами диффузного отражения, и второй участок 216, поверхность которого обладает свойствами зеркального отражения, причем второй участок 216 разбит на ряд локальных зон 217, расположенных на первом участке 214, и вторую структуру 220, содержащую наклонную поверхность 222, которая является практически плоской и наклонена относительно указанной плоской базовой поверхности, при этом наклонная поверхность содержит элементы рельефа или зеркальные элементы, которые распределены равномерно по наклонной поверхности. Обеспечивается измерение за одну экспозицию. 4 н. и 24 з.п. ф-лы, 6 ил.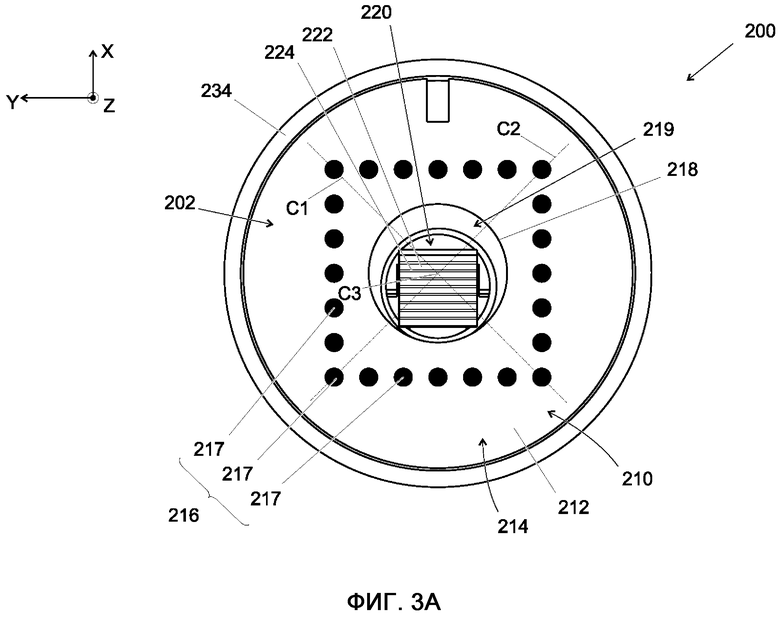
1. Трехкоординатная мишень, способная служить в качестве базы отсчета положений, содержащая на рабочей грани:
• первую структуру, образующую плоскую базовую поверхность, поделенную по меньшей мере на:
- первый участок, поверхность которого обладает отражающими свойствами в соответствии с первыми параметрами отражения, и
- второй участок, поверхность которого обладает отражающими свойствами в соответствии со вторыми параметрами отражения, которые отличаются от первых параметров отражения, причем второй участок разбит на ряд локальных зон, расположенных на первом участке, и
• вторую структуру, содержащую наклонную поверхность, которая является практически плоской и наклонена относительно указанной плоской базовой поверхности, при этом наклонная поверхность содержит элементы рельефа или зеркальные элементы, которые распределены равномерно по наклонной поверхности.
2. Трехкоординатная мишень по п. 1, отличающаяся тем, что указанные локальные зоны вместе образуют геометрическую фигуру, которая является одной из следующих фигур: четырехугольник, параллелограмм, прямоугольник, квадрат, ромб, правильный многоугольник и окружность.
3. Трехкоординатная мишень по п. 1, отличающаяся тем, что локальные зоны указанного второго участка образованы островками или сегментами, которые распределены на первом участке.
4. Трехкоординатная мишень по п. 1, отличающаяся тем, что локальные зоны выполнены из хрома.
5. Трехкоординатная мишень по п. 1, отличающаяся тем, что наклонная поверхность содержит элементы рельефа, которые распределены равномерно.
6. Трехкоординатная мишень по п. 1, отличающаяся тем, что первая структура и вторая структура расположены на рабочей грани соосно друг другу.
7. Трехкоординатная мишень по п. 6, отличающаяся тем, что первая структура окружает вторую структуру.
8. Трехкоординатная мишень по п. 7, отличающаяся тем, что локальные зоны второго участка первой структуры образуют квадрат, который окружает вторую структуру.
9. Трехкоординатная мишень по п. 1, отличающаяся тем, что первая структура определяет границы окна для корпуса, вмещающего указанную вторую структуру.
10. Трехкоординатная мишень по п. 9, отличающаяся тем, что вторая структура расположена в указанном корпусе вместе с наклонной поверхностью, которая отнесена назад относительно базовой поверхности первой структуры.
11. Трехкоординатная мишень по п. 1, отличающаяся тем, что наклонная поверхность второй структуры имеет полосатую структуру.
12. Трехкоординатная мишень по п. 11, отличающаяся тем, что наклонная поверхность второй структуры покрыта одним из следующих элементов: травленой сеткой, структурной решеткой или сеткой зеркальных линий.
13. Трехкоординатная мишень по п. 1, отличающаяся тем, что также содержит пластину из прозрачного материала, в частности стекла, закрывающую первую структуру и вторую структуру со стороны рабочей грани.
14. Трехкоординатная мишень по п. 1, отличающаяся тем, что одна из поверхности первого участка и поверхности второго участка обладает свойствами диффузного отражения, а другая из поверхности первого участка и поверхности второго участка обладает свойствами зеркального отражения.
15. Трехкоординатная мишень по п. 1, отличающаяся тем, что поверхность первого участка обладает свойствами диффузного отражения, а поверхность второго участка обладает свойствами зеркального отражения.
16. Трехкоординатная мишень по п. 1, отличающаяся тем, что наклонная поверхность содержит зеркальные элементы, которые распределены равномерно по наклонной поверхности.
17. Трехкоординатное оптическое измерительное устройство для измерения расположения первого объекта относительно второго объекта, содержащее трехкоординатную мишень по п. 1, предназначенную для установки на указанный первый объект, и оптическую систему, содержащую первую съемочную систему и вторую съемочную систему и предназначенную для установки на указанный второй объект, причем разность между фокусным расстоянием второй съемочной системы и фокусным расстоянием первой съемочной системы лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность от наклонной поверхности.
18. Трехкоординатное оптическое измерительное устройство по п. 17, отличающееся тем, что глубина резко изображаемого пространства первой съемочной системы по меньшей мере в десять раз больше, чем глубина резко изображаемого пространства второй съемочной системы.
19. Трехкоординатное оптическое измерительное устройство по п. 17, отличающееся тем, что одна из первой и второй съемочных систем повернута в направлении рабочей грани мишени и образует съемочную систему, центрированную с мишенью, а другая из указанных первой и второй съемочных систем содержит оптический тракт, который встречается с оптическим трактом съемочной системы, центрированной с мишенью, и образует смещенную съемочную систему.
20. Трехкоординатное оптическое измерительное устройство по п. 17, отличающееся тем, что первая съемочная система повернута в направлении рабочей грани мишени и образует съемочную систему, центрированную с мишенью, а вторая съемочная система содержит оптический тракт, который встречается с оптическим трактом съемочной системы, центрированной с мишенью, и образует съемочную систему, смещенную относительно мишени.
21. Трехкоординатное оптическое измерительное устройство по п. 17, отличающееся тем, что также содержит осветитель, направленный на трехкоординатную мишень, причем указанный осветитель расположен так, чтобы обеспечить боковое освещение трехкоординатной мишени.
22. Трехкоординатное оптическое измерительное устройство по п. 17, отличающееся тем, что первая съемочная система является телецентрической и вторая съемочная система является телецентрической.
23. Система для трехкоординатного оптического измерения расположения первого объекта относительно второго объекта, содержащая:
- агрегат, содержащий первый объект и второй объект,
- оптическое измерительное устройство по п. 17, в котором:
- первая съемочная система выполнена так, что ее задняя фокальная плоскость может совпадать с базовой поверхностью первой структуры, а
- вторая съемочная система выполнена так, что ее задняя фокальная плоскость может пересекать наклонную поверхность трехкоординатной мишени.
24. Система по п. 23, отличающаяся тем, что указанный агрегат представляет собой станочный модуль; первым объектом является держатель инструмента, а вторым объектом является держатель материала или держатель детали.
25. Способ трехкоординатного оптического измерения в соответствии с тремя ортогональными направлениями X, Y и Z положения первого объекта относительно второго объекта, которые находятся на одной линии и удалены друг от друга в главном направлении Z, включающий этапы, на которых:
- предусматривают трехкоординатную мишень, образующую базу для отсчета положений и содержащую на рабочей грани:
• первую структуру, образующую плоскую базовую поверхность, поделенную по меньшей мере на:
- первый участок, поверхность которого обладает отражающими свойствами в соответствии с первыми параметрами отражения, и
- второй участок, поверхность которого обладает отражающими свойствами в соответствии со вторыми параметрами отражения, которые отличаются от первых параметров отражения, причем второй участок разбит на ряд локальных зон, расположенных на первом участке, и
• вторую структуру, содержащую наклонную поверхность, которая является практически плоской и наклонена относительно указанной плоской базовой поверхности,
- предусматривают оптическую систему, содержащую первую съемочную систему и вторую съемочную систему, при этом оптическую систему выполняют так, что разность фокусных расстояний второй съемочной системы и первой съемочной системы лежит в интервале между минимальным расстоянием и максимальным расстоянием, отделяющим базовую поверхность от наклонной поверхности,
- указанную трехкоординатную мишень размещают на первом объекте,
- указанную оптическую систему размещают на втором объекте так, что, с одной стороны, фокусное расстояние первой съемочной системы позволяет разместить фокус изображения первой съемочной системы на первой структуре мишени, а, с другой стороны, фокусное расстояние второй съемочной системы позволяет разместить фокус изображения второй съемочной системы на второй структуре мишени,
- производят по меньшей мере одну экспозицию одновременно посредством первой съемочной системы, принадлежащей оптической системе, и посредством второй съемочной системы, принадлежащей оптической системе, и тем самым при каждой экспозиции, выполняемой посредством оптической системы, с одной стороны, первая съемочная система формирует первое изображение мишени, которое дает возможность определить положение локальных зон на базовой поверхности, что дает, во-первых, первую часть информации о положении мишени относительно первой съемочной системы в направлении X, а, во-вторых, вторую часть информации о положении мишени относительно первой съемочной системы в направлении Y, а, с другой стороны, вторая съемочная система формирует второе изображение мишени, содержащее резко изображаемый участок, соответствующий местоположению наклонной поверхности второй структуры, что дает третью часть информации о расстоянии между мишенью и второй съемочной системой в направлении Z.
26. Способ по п. 25, отличающийся тем, что после размещения трехкоординатной мишени на первом объекте и размещения оптической системы на втором объекте выполняют дополнительный этап определения пространственного положения мишени в координатах X, Y и Z относительно первого объекта посредством оптической системы.
27. Способ по п. 25, отличающийся тем, что для измерения, в трехкоординатном пространстве станочного модуля, положения держателя инструмента относительно держателя детали, при котором первым объектом является указанный держатель инструмента, а вторым объектом является указанный держатель детали, перед указанным этапом одновременной съемки посредством оптической системы выполняют дополнительный этап, на котором:
- держатель инструмента и держатель детали располагают на одной линии в главном направлении Z так, чтобы рабочая грань трехкоординатной мишени была расположена в оптическом тракте оптической системы.
28. Способ по п. 27, отличающийся тем, что оптическое устройство также содержит третью съемочную систему, расположенную на держателе инструмента и выполненную с возможностью регистрации ориентации рабочей грани мишени и/или углового положения держателя инструмента.
| US 2014343890 A1, 20.11.2014 | |||
| US 2004202364 A1, 14.10.2004 | |||
| JP H07246547 A, 26.09.1995 | |||
| DE 202016004237 U1, 23.08.2016. |

