Изобретение относится, преимущественно, к области станкостроения и может быть использовано в рамках реализации Государственной программы внедрения современного уровня достижений в сфере «нанотехнологий» в ведущих отраслях техники, определяющих уровень экономического развития страны в целом.
Преимущественное направление использования - автоматизированная мехатронная обработка резанием функционального слоя изделия со сложным пространственным профилем и формой (в плане) формируемых в функциональном слое профильных структур фрагментов рисунка гравюры с высокой степенью точности, при обеспечении возможности, преимущественно, одновременного (т.е. в реальном режиме времени) формирования на поверхности упомянутых профильных структур дополнительных микро- и/или наноструктур, функционально являющихся специальными, дополнительными, как правило, программно-организованными (т.е. машиносчитываемыми) элементами защиты изделия от подделки (т.е. несанкционированного воспроизводства) при использовании известного из уровня техники станочного оборудования.
Например, заявленный способ может быть успешно реализован при изготовлении печатных форм для металлографской печати, используемых для производства денежных знаков /банкнот/ и иных ценных бумаг.
Из уровня техники известен программно-аппаратный комплекс для формирования резанием дискретных профильных структур рисунка гравюры в функциональном слое печатной формы, включающий прецизионный металлорежущий станок с исполнительной системой позиционирования и относительного рабочего перемещения инструмента, включающей координатно-организованную механическую структуру главного формообразующего перемещения инструмента относительно поверхности функционального слоя (т.е. систему перемещения по координатным осям X, Y, Z). Кроме того, комплекс оснащен системой числового программного управления упомянутой исполнительной системой позиционирования и относительного перемещения инструмента (RU патент на полезную модель №48164, 2005 г.).
На данном программно-аппаратном комплексе реализуется способ формирования дискретных профильных структур рисунка гравюры в функциональном слое печатной формы на металлорежущем станке, согласно которому осуществляют главное формообразующее перемещение инструмента относительно поверхности функционального слоя печатной формы при использовании программно-организованной координатной исполнительной системы перемещения (т.е. исполнительной системы позиционирования и относительного рабочего перемещения инструмента, включающей координатно-организованную механическую структуру главного формообразующего перемещения инструмента относительно поверхности функционального слоя по координатным осям X, Y, Z).
Прецизионный металлорежущий станок известного программно-аппаратного комплекса содержит
- станину с вертикальной стойкой;
- размещенную на стойке шпиндельную бабку с вращающимся по координате С в плоскости XY относительно оси Z базовой системы XYZ отсчета станка шпинделем со средствами для крепления инструмента (инструментодержателем), который размещен в гильзе, кинематически связанной со шпиндельной бабкой посредством шарико-винтового механизма с возможностью возвратно-поступательного перемещения вдоль оси Z;
- салазки, установленные на станине в горизонтальных направляющих с возможностью возвратно-поступательного перемещения по оси У посредством шарико-винтового механизма;
- основной стол, установленный на салазках в горизонтальных направляющих с возможностью возвратно-поступательного перемещения по оси Х посредством шарико-винтового механизма;
- позиционирующее устройство для пространственной ориентации обрабатываемой заготовки относительно плоскости XY, стационарно закрепленное относительно установочной поверхности основного стола;
- автономные средства привода вышеупомянутых шариковинтовых механизмов;
- оптико-электронную измерительную систему для контроля и коррекции положения вершины и/или режущей кромки инструмента относительно базовой системы XYZ отсчета станка, установленную на основном столе с возможностью визуализации режущей части инструмента на экране монитора управляющего компьютера системы числового программного управления (ЧПУ) посредством исходных управляющих программ;
- средства оцифровки рабочей поверхности функционального слоя заготовки, выполненные с возможностью передачи результатов оцифровки в память управляющего компьютера системы ЧПУ для обеспечения коррекции исходных управляющих программ.
Совершенно очевидно, что шпиндельная бабка с ее вышеперечисленными кинематическими узлами, а также салазки, основной стол, позиционирующее устройство, автономные средства привода шариковинтовых механизмов, оптико-электронная измерительная система, средства оцифровки рабочей поверхности функционального слоя заготовки данного известного из уровня техники гравировального комплекса в совокупности образуют исполнительную систему позиционирования и относительного рабочего перемещения инструмента, включающую координатно организованную механическую структуру главного формообразующего перемещения инструмента относительно поверхности функционального слоя (т.е. систему перемещения относительно координатных осей X, Y, Z), которая (т.е. исполнительная система позиционирования и относительного перемещения инструмента) в технологическом режиме программно-организована и функционирует посредством системы числового программного управления (ЧПУ), связанной посредством пульта управления с процессором управляющего компьютера.
Оптико-электронная измерительная система может включать, например, один телевизионный компьютерный микроскоп, который стационарно закреплен на основном столе станка таким образом, что главная оптическая ось его объектива ориентирована по направления возвратно-поступательного перемещения основного стола и координатно адаптирована с нулевой точкой базовой системы XYZ отсчета станка и нулевой точкой исходных управляющих программ.
Средство крепления инструмента (инструментодержатель) расположено непосредственно на шпинделе с возможностью обеспечения соосности по оси Z продольной оси инструмента с осью вращения шпинделя по координате С относительно оси Z.
К недостаткам данного известного из уровня техники способа (реализуемого посредством вышеописанного программно-аппаратного комплекса) следует отнести недостаточные точность позиционирования инструмента перед началом обработки и точность его относительного перемещения в процессе обработки изделий (ограниченные точностью перемещения /дискретностью шага/ шарико-винтовых механизмов используемых средств относительного перемещения инструмента), а также ограниченные функциональные возможности вследствие отсутствия возможности в процессе формирования основных профильных структур фрагментов рисунка гравюры формировать дополнительные микро- и наноструктуры (функционально являющиеся специальными, дополнительными, программно-организованными элементами защиты изделия от подделки), а также изменять форму профиля формируемых дискретных структур рисунка гравюры как до начала осуществления процесса резания, так и в процессе резания без прерывания технологического цикла обработки и без замены режущего инструмента.
Следует отметить, что точность обработки является наиболее важным критерием качества и защищенности, например, для металлографских печатных форм, используемых в процессе изготовления денежных знаков (банкнот) и иных ценных бумаг, поскольку за счет этого параметра обработки, как правило, обеспечиваются и дополнительные степени защиты от подделки упомянутых ценных изделий.
В основу заявленного изобретения была положена задача расширения функциональных возможностей способа формирования дискретных профильных структур рисунка гравюры с использованием металлорежущего станка программно-аппаратного комплекса за счет придания инструменту дополнительных степеней свободы относительного перемещения при повышения точности позиционирования инструмента перед началом обработки и точности его относительного перемещения в процессе обработки изделий путем редуцирования (преимущественно, уменьшения) величины перемещения режущей части (например, вершины инструмента) с заданным коэффициентом редукции относительно величины перемещения исполнительных звеньев средств относительного перемещения инструмента по дополнительным степеням свободы.
Указанный технический результат позволяет посредством заявленного способа реализовать возможность в процессе формирования основных профильных структур фрагментов рисунка гравюры также формировать дополнительные микро- и наноструктуры, функционально являющиеся специальными, дополнительными, программно-организованными элементами защиты изделия от подделки, которые могут быть выявлены как визуально, так и с помощью специальных средств детектирования, в зависимости от их геометрических параметров.
Кроме того, обеспечивается возможность изменять форму профиля формируемых дискретных профильных структур рисунка гравюры как до начала осуществления процесса резания, так и во время процесса резания без прерывания технологического цикла обработки и без замены режущего инструмента.
Поставленная задача решается посредством того, что в способе формирования дискретных профильных структур рисунка гравюры в функциональном слое печатной формы на металлорежущем станке, согласно которому осуществляют главное формообразующее перемещение инструмента относительно поверхности функционального слоя печатной формы при использовании программно организованной координатной исполнительной системы перемещения, согласно изобретению в процессе главного формообразующего перемещения инструмента осуществляют модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур, посредством чего формируют интегральное формообразующее перемещение инструмента, для чего инструменту сообщают, по меньшей мере, одно, дополнительное модулирующее перемещение посредством циклического поворота его продольной оси в пределах заданного угла в, по меньшей мере, одной плоскости.
Целесообразно в процессе интегрального формообразующего перемещения инструмента осуществлять модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур, посредством чего формируют производное интегральное формообразующее перемещение инструмента, для чего инструменту сообщают второе дополнительное модулирующее перемещение посредством циклического поворота его продольной оси на заданный угол в плоскости, совмещенной, в пределах технологического допуска, с плоскостью поворота оси инструмента, обеспечиваемого первым дополнительным модулирующим перемещением, при этом первое и второе дополнительные модулирующие перемещения осуществляют с различными периодами циклов и амплитудой дифференциальных колебательных процессов инструмента.
Разумно модуляцию упомянутых формообразующих перемещений инструмента осуществлять в дискретно-статическом, и/или дискретно-динамическом, и/или импульсном, преимущественно циклическом, и/или непрерывном, преимущественно циклическом, технологических режимах функционирования.
Допустимо циклический поворот продольной оси инструмента осуществлять относительно:
- одного центра поворота, лежащего, в пределах технологического допуска, на оси инструмента;
- одного центра поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента;
- пространственно разнесенных центров поворота, лежащих, в пределах технологического допуска, на оси инструмента;
- одного центра поворота, лежащего, в пределах технологического допуска, за пределами оси инструмента;
- пространственно разнесенных центров поворота, лежащих, в пределах технологического допуска, за пределами оси инструмента;
- относительно пространственно разнесенных центров поворота.
Допустимо технологический процесс формирования дискретных профильных структур осуществлять на гравировально-строгальном станке.
Также допустимо технологический процесс формирования дискретных профильных структур осуществлять на гравировально-фрезерном станке.
При осуществлении технологического процесса формирования дискретных профильных структур на гравировально-строгальном станке в качестве режущего инструмента могут быть использованы:
- резец с треугольной формой передней поверхности, а циклический поворот при этом его оси, при этом, осуществляют относительно центра поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента;
- резец с трапециевидной формой передней поверхности, а циклический поворот его оси при этом осуществляют вокруг центра поворота, совмещенного, в пределах технологического допуска, с точкой пересечения его оси с поперечной режущей кромкой инструмента;
- резец, режущая часть которого имеет форму трехгранной пирамиды, каждая грань которой функционально является передней поверхностью резца.
При осуществлении технологического процесса формирования дискретных профильных структур на гравировально-фрезерном станке в качестве режущего инструмента целесообразно использовать коническую фрезу.
Оптимально первое и/или второе модулирующие перемещения инструмента осуществлять в двух плоскостях, пересекающихся под углом близким или равным 90°, при этом одну из упомянутых плоскостей целесообразно ориентировать вдоль вектора мгновенной скорости главного формообразующего перемещения инструмента.
В качестве средств обеспечения циклического поворота оси инструмента в заданной плоскости можно использовать систему плоских и/или пространственных шарнирных механизмов, кинематически связывающих инструментодержатель со шпиндельной бабкой станка, управление которыми необходимо осуществлять посредством программно организованной системы независимых приводов, например электромеханического, и/или магнитомеханического, и/или электромагнитного типов.
Разумно средства обеспечения циклического поворота оси инструмента в заданной плоскости, обеспечивающие дополнительные модулирующие перемещения с меньшими периодами циклов и/или амплитудой дифференциальных колебательных процессов инструмента, последовательно размещать в непосредственной близости к инструменте держателю.
Оптимально в качестве подвижного звена каждого последующего шарнирного механизма упомянутых средств поворота использовать базовое звено предыдущего шарнирного механизма, которое может быть предназначено для базирования на нем программно организованного независимого привода перемещения подвижного звена этого шарнирного механизма.
Как правило, в качестве координатной исполнительной системы перемещения инструмента используют трехкоординатную систему с ортогональным расположением осей.
В случае, если траектория главного формообразующего перемещения инструмента отличается от прямолинейной, в процессе осуществления этого перемещения инструменту целесообразно дополнительно сообщать вращательное движение (поворот вокруг его оси на технологически заданный угол) посредством независимого привода.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками и связями между ними, идентичными всем существенным признакам заявленного технического решения, а выбранный из перечня выявленных аналогов прототип, как наиболее близкий по совокупности признаков аналог, позволил выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности «новизна» по действующему законодательству.
Изобретение иллюстрируется графическими материалами.
Фиг.1 - общий вид программно-аппаратного комплекса (вид спереди) для реализации заявленного способа.
Фиг.2 - общий вид программно-аппаратного комплекса (вид слева по фиг.1).
Фиг.3 - общий вид металлорежущего станка программно-аппаратного комплекса для реализации заявленного способа в аксонометрической проекции с привязкой перемещений кинематических узлов его исполнительной системы к системе координат XYZ и поворота инструмента относительно его оси по координате С.
Фиг.4 - узел I по фиг.1, иллюстрирующий кинематику первого и второго узлов дополнительного перемещения инструмента, обеспечивающих поворот оси инструмента в одной плоскости (по стрелкам V под действием усилия Р) вокруг центров поворота O1 и O2 (по дугам окружностей с радиусами Ro1 и Ro2 соответственно), один из которых (О2) совмещен с вершиной инструмента, а другой (O1) расположен на оси инструмента выше его вершины, а также во взаимно перпендикулярной плоскости вокруг центра поворота O1 (по дуге окружности с радиусом Ro1) также по стрелкам V под действием усилия Р (независимые приводы дополнительного перемещения инструмента условно не показаны).
Фиг.5 - вид А по фиг.4.
Фиг.6 - узел I по фиг.1, иллюстрирующий кинематику первого и второго узлов дополнительного перемещения инструмента, обеспечивающих поворот оси инструмента в одной плоскости (по стрелкам V под действием усилия Р) вокруг пространственно разнесенных центров поворота О3 и O4 (по дугам окружностей с радиусами Ro3 и Ro4 соответственно), расположенных за пределами оси инструмента (независимые приводы дополнительного перемещения инструмента условно не показаны).
Фиг.7 - схема поворота оси инструмента относительно центра поворота O1 под действием одного из дополнительных узлов перемещения, графически иллюстрирующая редуцирование (уменьшение) величины перемещения L вершины инструмента (равно как и любой точки его режущей кромки) по отношению к величине L1 перемещения исполнительного элемента дополнительного узла перемещения.
Фиг.8 - пример изменения формы поперечного профиля формируемой дискретной профильной структуры посредством первого узла дополнительного перемещения инструмента при использовании резца с треугольной формой передней поверхности при повороте его оси на угол «α» в одной плоскости относительно центра поворота O2, совмещенного с вершиной передней поверхности инструмента.
Фиг.9 - пример изменения формы поперечного профиля формируемой дискретной профильной структуры посредством первого узла дополнительного перемещения инструмента при использовании резца с треугольной формой передней поверхности при повороте его оси на угол «α» в одной плоскости относительно центра поворота O1, расположенного на оси инструмента выше его вершины.
Фиг.10 - пример изменения формы поперечного профиля формируемой дискретной профильной структуры посредством первого узла дополнительного перемещения инструмента при использовании резца с трапециедальной формой передней поверхности при повороте его оси на угол «α» в одной плоскости относительно центра поворота O1, расположенного на середине поперечной режущей кромки передней поверхности инструмента.
Фиг.11 - пример изменения формы поперечного профиля формируемой дискретной профильной структуры посредством первого узла дополнительного перемещения инструмента при использовании резца с трапециедальной формой передней поверхности при повороте его оси на угол «α» в одной плоскости относительно центра поворота O2, расположенного на оси инструмента выше поперечной режущей кромки передней поверхности инструмента.
Фиг.12 - пример изменения формы продольного профиля и формы в плане формируемой дискретной профильной структуры посредством первого узла дополнительного перемещения инструмента при повороте его оси на угол «α» в одной плоскости относительно центра поворота O1, лежащего на оси инструмента выше его вершины.
Фиг.13 - общая схема оптико-электронной измерительной системы.
Фиг.14 - пример реализации интегрального формообразующего перемещения инструмента посредством модуляции траектории главного формообразующего перемещения посредством двух дополнительных модулирующих перемещений (интерпретированный методом компьютерной графики в соответствии с заданными функциями траекторий соответствующих перемещений).
Конструктивные элементы, узлы механизмы и системы программно-аппаратного комплекса для реализации заявленного способа в графических материалах и далее по тексту описания обозначены следующими позициями:
1 - станина;
2 - стойка (вертикальная);
3 - бабка (шпиндельная);
4 - шпиндель;
5 - гильза (шпинделя 4);
6 - салазки;
7 - стол (основной);
8 - устройство (для позиционирования обрабатываемого изделия);
9 - инструмент (режущий);
10 - инструментодержатель;
11 - монитор;
12 - компьютер (управляющий);
13 - микроскоп (телевизионный компьютерный);
14 - ось (объектива 15);
15 - объектив (микроскопа 13);
16 - экран (оптико-электронной измерительной системы);
17 - осветитель;
18 - осветитель;
19 - узел (первый) дополнительного перемещения инструмента 9;
20 - ось (инструмента 9);
21 - узел (второй) дополнительного перемещения инструмента 9;
22 - заготовка;
23 - экран (отражающий);
24 - камера (телевизионная);
25 - кольца (удлинительные);
26 - стойка;
27 - стойка;
28 - фиксатор;
29 - стойка.
Физико-технологическая сущность способа формирования дискретных профильных структур рисунка гравюры в функциональном слое печатной формы на металлорежущем станке согласно изобретению заключается в следующем.
В процессе технологического цикла осуществляют главное формообразующее перемещение инструмента 9 относительно поверхности функционального слоя печатной формы при использовании программно-организованной координатной исполнительной системы перемещения. В процессе главного формообразующего перемещения инструмента 9 осуществляют модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур. Посредством этого формируют интегральное формообразующее перемещение инструмента 9. Для осуществления упомянутой модуляции инструменту 9 сообщают, по меньшей мере, одно (дополнительное) модулирующее перемещение посредством циклического поворота его продольной оси 20 в пределах заданного угла «α» в, по меньшей мере, одной плоскости.
Целесообразно в процессе интегрального формообразующего перемещения инструмента 9 осуществлять модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур, посредством чего формируют производное интегральное формообразующее перемещение инструмента. Для этого инструменту сообщают второе дополнительное модулирующее перемещение посредством циклического поворота его продольной оси 9 на заданный угол «α» в плоскости, совмещенной (в пределах технологического допуска) с плоскостью поворота оси инструмента, обеспечиваемого первым дополнительным модулирующим перемещением. При этом первое и второе дополнительные модулирующие перемещения осуществляют с различными периодами циклов и/или амплитудой дифференциальных колебательных процессов инструмента.
Разумно модуляцию упомянутых формообразующих перемещений инструмента осуществлять в дискретно-статическом, и/или дискретно-динамическом, и/или импульсном, преимущественно циклическом, и/или непрерывном, преимущественно циклическом технологических режимах функционирования.
Допустимо циклический поворот продольной оси 20 инструмента 9 осуществлять относительно:
- одного центра O1 поворота, лежащего, в пределах технологического допуска, на оси инструмента 9;
- одного центра O2 поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента 9;
- пространственно разнесенных центров O1 и О2 поворота, лежащих, в пределах технологического допуска, на оси инструмента;
- одного центра О3 поворота, лежащего, в пределах технологического допуска, за пределами оси инструмента 9;
- пространственно разнесенных центров О3 и O4 поворота, лежащих, в пределах технологического допуска, за пределами оси инструмента;
- относительно пространственно разнесенных центров O1 и О3 поворота.
Допустимо технологический процесс формирования дискретных профильных структур осуществлять на гравировально-строгальном станке.
Также допустимо технологический процесс формирования дискретных профильных структур осуществлять на гравировально-фрезерном станке.
При осуществлении технологического процесса формирования дискретных профильных структур на гравировально-строгальном станке в качестве режущего инструмента 9 могут быть использованы:
- резец с треугольной формой передней поверхности, а циклический поворот его оси, при этом, осуществляют относительно центра поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента 9;
- резец с трапециевидной формой передней поверхности, а циклический поворот его оси, при этом, осуществляют вокруг центра поворота, совмещенного, в пределах технологического допуска, с точкой пересечения его оси с поперечной режущей кромкой инструмента 9;
- резец, режущая часть которого имеет форму трехгранной пирамиды, каждая грань которой функционально является передней поверхностью резца.
При осуществлении технологического процесса формирования дискретных профильных структур на гравировально-фрезерном станке в качестве режущего инструмента 9 целесообразно использовать коническую фрезу.
Оптимально первое и/или второе модулирующие перемещения инструмента 9 осуществлять в двух плоскостях, пересекающихся под углом, близким или равным 90°, при этом одну из упомянутых плоскостей целесообразно ориентировать вдоль вектора мгновенной скорости главного формообразующего перемещения инструмента 9.
В качестве средств обеспечения циклического поворота оси 20 инструмента 9 в заданной плоскости (узлов 19 и 21) можно использовать систему плоских и/или пространственных шарнирных механизмов, кинематически связывающих инструментодержатель 10 со шпиндельной бабкой 3 станка, управление которыми необходимо осуществлять посредством программно организованной системы независимых приводов, например электромеханического, и/или магнитомеханического, и/или электромагнитного типов.
Разумно средства (узлы 19 и 21) обеспечения циклического поворота оси 20 инструмента 9 в заданной плоскости, обеспечивающие дополнительные модулирующие перемещения с меньшими периодами циклов и/или амплитудой дифференциальных колебательных процессов инструмента, последовательно размещать в непосредственной близости к инструментодержателю 10.
Оптимально в качестве подвижного звена каждого последующего шарнирного механизма упомянутых средств поворота (узлов 19 и 21) использовать базовое звено предыдущего шарнирного механизма, которое может быть предназначено для базирования на нем программно организованного независимого привода перемещения подвижного звена этого шарнирного механизма.
Как правило, в качестве координатной исполнительной системы перемещения инструмента 9 используют трехкоординатную систему с ортогональным расположением осей.
В случае, если траектория главного формообразующего перемещения инструмента 9 отличается от прямолинейной, в процессе осуществления этого перемещения инструменту 9 целесообразно дополнительно сообщать вращательное движение (поворот вокруг его оси 20 на технологически заданный угол) посредством независимого привода.
Пример реализации заявленного способа раскрывается на принципе функционирования нижеописанного программно-аппаратного комплекса. Программно-аппаратный комплекс для формирования резанием дискретных профильных структур рисунка гравюры в функциональном слое печатной формы (реализующий заявленный способ) включает прецизионный металлорежущий станок с исполнительной системой позиционирования и относительного рабочего перемещения инструмента 9, включающей координатно-организованную механическую структуру главного формообразующего перемещения инструмента 9 относительно поверхности функционального слоя (т.е. систему перемещения по координатным осям X, Y, Z и поворота по координате С). Кроме того, комплекс оснащен системой числового программного управления (ЧПУ) упомянутой исполнительной системой позиционирования и относительного перемещения инструмента (например, типа CNC модели Sinumerik 840Di) и системой подготовки управляющих программ к исполнению на ЧПУ на базе Intel-совместимого персонального управляющего компьютера 12.
Прецизионный металлорежущий станок заявленного программно-аппаратного комплекса содержит
- станину 1 с вертикальной стойкой 2,
- размещенную на стойке 2 шпиндельную бабку 3 с вращающимся (по координате С в плоскости XY относительно оси Z базовой системы XYZ отсчета станка) шпинделем 4 со средством для крепления инструмента 9 (т.е. инструментодержателем 10), который (т.е. шпиндель 4) размещен в гильзе 5, кинематически связанной со шпиндельной бабкой 3 посредством шариковинтового механизма (в виде шариковинтовой пары) с возможностью возвратно-поступательного перемещения относительно оси Z;
- салазки 6, установленные на станине 1 в горизонтальных направляющих с возможностью возвратно-поступательного перемещения по оси Y посредством шариковинтового механизма (в виде шариковинтовой пары);
- основной стол 7, установленный на салазках 6 в горизонтальных направляющих с возможностью возвратно-поступательного перемещения по оси Х посредством шариковинтового механизма (в виде шариковинтовой пары);
- позиционирующее устройство 8 для пространственной ориентации обрабатываемой заготовки 22 относительно плоскости XY, стационарно закрепленное относительно установочной поверхности основного стола 7;
- автономные средства привода вышеупомянутых шариковинтовых механизмов;
- оптико-электронную измерительную систему для контроля и коррекции положения вершины и/или режущей кромки инструмента 9 относительно базовой системы XYZ отсчета станка, установленную на основном столе 7 с возможностью визуализации режущей части инструмента 9 на экране монитора 11 управляющего компьютера 12 системы числового программного управления (ЧПУ) и коррекции ее положения посредством исходных управляющих программ;
- средства оцифровки рабочей поверхности функционального слоя заготовки, выполненные с возможностью передачи результатов оцифровки в память управляющего компьютера 12 системы ЧПУ для обеспечения коррекции исходных управляющих программ.
В качестве автономных средств привода вышеупомянутых шарико-винтовых механизмов могут быть использованы, например, электродвигатели модели Siemens IFK60GO-6AFN-IAAO.
Совершенно очевидно, что шпиндельная бабка 3 с ее вышеперечисленными кинематическими узлами, а также салазки 6, основной стол 7, позиционирующее устройство 8, автономные средства привода шарико-винтовых механизмов, оптико-электронная измерительная система, средства оцифровки рабочей поверхности функционального слоя заготовки 22 заявленного программно-аппаратного гравировального комплекса функционально входят в исполнительную систему позиционирования и относительного рабочего перемещения инструмента 9, включающую координатно организованную систему главного формообразующего перемещения инструмента 9 относительно поверхности функционального слоя (т.е. систему перемещения относительно координатных осей X, Y, Z), которая (т.е. исполнительная система позиционирования и относительного перемещения инструмента) в технологическом режиме программноорганизована и функционирует посредством системы числового программного управления (ЧПУ), связанной посредством пульта управления с процессором управляющего компьютера 12.
Оптико-электронная измерительная система может включать, например, один телевизионный компьютерный микроскоп 13, который стационарно закреплен на основном столе 7 станка таким образом, что главная оптическая ось 14 его объектива 15 ориентирована по направления возвратно-поступательного перемещения основного стола 7 и координатно адаптирована с нулевой точкой базовой системы XVZ отсчета станка и нулевой точкой исходных управляющих программ.
Оптико-электронная измерительная система может быть оснащена экраном 16, расположенным в поле зрения объектива 15 телевизионного компьютерного микроскопа 13 позади зоны ввода инструмента 9 в это поле), а также двумя осветителями 17 и 18, один из которых (осветитель 17) установлен с возможностью осуществления подсветки экрана 16, а другой (осветитель 18) - передней поверхности режущей части инструмента 9.
Станок также может быть оснащен пневмооборудованием, включающим форсунку (установленную с возможностью обдува зоны резания с целью удаления продуктов резания в виде микростружки) и вытяжное устройство, размещенное оппозитно форсунке с возможностью отсоса удаляемых продуктов резания из зоны обработки.
Станок может быть создан на базе координатно-расточного станка модели 2431СФ10 с использованием его основных корпусных деталей (станина, салазки, стол, стойка, корпус шпиндельной бабки) с их доработкой и оснащением дополнительными функциональными узлами и системами.
Отличительные особенности заявленного программно-аппаратного комплекса заключаются в следующем.
Исполнительная система позиционирования и относительного рабочего перемещения инструмента 9 содержит оснащенный независимым приводом, по меньшей мере, один первый узел 19 дополнительного перемещения инструмента 9. Узел 19 конструктивно выполнен и кинематически связан с инструментодержателем 10, а также с гильзой 5 или шпинделем 4 станка с возможностью осуществления поворота продольной оси инструметодержателя 10, функционально являющейся и осью 20 инструмента 9, на заданный угол «α», по меньшей мере, в одной плоскости. Узел 19 функционально является первым средством модуляции регламентированных главным формообразующим перемещением инструмента 9 геометрических параметров профиля и формы в плане формируемых дискретных профильных структур рисунка гравюры, обеспечивающим возможность формирования интегрального формообразующего перемещения инструмента 9 в процессе технологического цикла.
То есть, узел 19 обеспечивает инструменту 9 дополнительные степени свободы относительного перемещения в пространстве с реализацией возможности повышения точности позиционирования инструмента 9 перед началом обработки и точности его относительного перемещения в процессе обработки изделий путем редуцирования (уменьшения на порядок и более) величины перемещения режущей части (например, вершины инструмента 9) с заданным коэффициентом редукции относительно величины перемещения исполнительных звеньев автономных средств, обеспечивающих относительное перемещение инструмента 9 по дополнительным степеням свободы.
Совершенно очевидно, что за счет эффекта редуцирования (в частности, в сторону уменьшения перемещения режущей части инструмента 9) уменьшается и погрешность по точности (дискретности шага) перемещения пропорционально величине коэффициента редукции. А это позволяет для осуществления перемещения режущей части инструмента 9 с микро- или нанометрической точностью использовать широко известные из уровня техники автономные средства перемещения с дискретностью шага в миллиметровом или микрометрическом диапазоне соответственно.
Кроме того, дополнительные степени свободы перемещения в пространстве инструмента 9 позволяют обеспечить (в процессе формирования основных профильных структур фрагментов рисунка гравюры) модуляцию траектории главного формообразующего перемещения инструмента 9. То есть, обеспечивается возможность одновременно с формированием основных профильных структур также формировать дополнительные микро- и наноструктуры, функционально являющиеся специальными, дополнительными, программно-организованными элементами защиты изделия от подделки, которые могут быть выявлены как визуально, так и с помощью специальных средств детектирования, в зависимости от их геометрических параметров.
Следует также отметить, что в рассматриваемом комплексе, реализующем заявленный способ, за счет придания инструменту 9 допонительных степеней свободы перемещения в пространстве обеспечивается возможность изменять форму профиля основных дискретных профильных структур рисунка гравюры как до начала осуществления процесса резания, так и в процессе резания без прерывания технологического цикла обработки и без замены режущего инструмента 9.
Оптимально, чтобы исполнительная система позиционирования и относительного рабочего перемещения инструмента 9 дополнительно содержала оснащенный независимым приводом, по меньшей мере, один второй узел 21 дополнительного перемещения инструмента 9. Узел 21 функционально является вторым средством модуляции регламентированных упомянутым интегральным формообразующим перемещением инструментодержателя 13 совместно с инструментом 9 геометрических параметров профиля и формы в плане дискретных профильных структур. Упомянутый узел 21 конструктивно выполнен и кинематически связан с инструментодержателем 10 (а также с первым узлом 19 и с гильзой 5 шпиндельной бабки 3) с возможностью осуществления поворота продольной оси инструментодержателя 10 (функционально являющейся и осью 20 инструмента 9) на заданный угол «α» в плоскости, совмещенной (в пределах технологического допуска) с плоскостью поворота оси инструментодержателя 10, обеспечиваемого первым узлом 19 дополнительного перемещения.
Такое конструктивное выполнение исполнительной системы еще в большей степени расширяет функционально-технологические возможности прграммно-аппаратного комплекса, реализующего заявленный способ, по тем же (вышераскрытым) технологическим параметрам, что и посредством первого узла 19 дополнительного относительного перемещения инструмента 9.
Целесообразно, чтобы независимые приводы перемещения первого и/или второго узлов 19 и 21 дополнительного перемещения инструмента 9 были выполнены и программно организованы с возможностью обеспечения первого и/или второго дополнительных модулирующих перемещений в дискретно-статическом, и/или дискретно-динамическом, и/или импульсном, преимущественно циклическом, и/или непрерывном, преимущественно циклическом, технологических режимах функционирования.
Здесь следует отметить, что под вышеперечисленными технологическими режимами функционирования в рамках настоящей заявки понимается следующее.
Дискретно-статический режим функционирования.
Режим, при котором поворот оси инструмента 9 на заданный угол в определенной плоскости (плоскостях) осуществляют однократно до начала осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается изменение на постоянные величины углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных профильных структур по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане.
Дискретно-динамический режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) на заданный угол в течение заданного промежутка времени осуществляют однократно, причем в процессе осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается изменение на постоянную величину углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных профильных структур по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане. При этом упомянутый заданный угол в каждой плоскости поворота является константой в течение упомянутого заданного промежутка времени.
Импульсный режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют импульсно через заданные промежутки времени в процессе осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается дискретное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на участках траектории перемещения инструмента 9, формируемых в период времени между импульсами.
Импульсный циклический режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют импульсно через заданные промежутки времени в процессе осуществления цикла обработки. Причем в течение периода импульса инструмент 9 возвращается в исходное положение. То есть, обеспечивается плавное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на участках траектории перемещения инструмента 9, формируемых в течение периода импульса.
Непрерывный режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют непрерывно в процессе осуществления цикла обработки. То есть, обеспечивается непрерывное плавное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на всей траектории перемещения инструмента 9.
Непрерывный циклический режим функционирования.
Режим, при котором поворот оси 20 инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов «а» осуществляют непрерывно по замкнутому циклу в процессе осуществления цикла обработки. То есть, в течение периода замкнутого цикла инструмент 9 возвращается в исходное положение. То есть, обеспечивается непрерывное, плавное, циклически повторяющееся изменение углов наклона боковых стенок и (в случае использования режущего инструмента 9 с трапецеидальным сечением) дна формируемых основных профильных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на всей траектории перемещения инструмента 9.
Совершенно очевидно, что на заявленном программно-аппаратном комплексе может быть реализован и интегрированный режим формирования каждой профильной структуры (канавки или выступа) и/или семейства данных структур, организованный посредством различного сочетания вышерассмотренных режимов функционирования.
Разумно, чтобы независимые приводы перемещения первого и/или второго узлов 19 и 21 дополнительного перемещения инструмента 12 были выполнены и программно организованы с возможностью обеспечения первого и/или второго дополнительных модулирующих перемещений с различными периодом цикла и/или амплитудой дифференциальных колебательных процессов инструментодержателя 10 совместно с инструментом 9.
Допустимо узлы 19 и 21 дополнительного перемещения инструмента 9 выполнять с возможностью осуществления поворота оси инструментодержателя 10 (и соответственно оси 20 инструмента 9) относительно:
- одного центра O1 поворота, лежащего, в пределах технологического допуска, на оси инструментодержателя 10 (функционально являющейся и осью 20 инструмента 9);
- одного центра O2 поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента 9.
- пространственно разнесенных центров O1 и О2 поворота, лежащих, в пределах технологического допуска, на оси инструментодержателя 10 (функционально являющейся и осью 20 инструмента 9).
- относительно одного центра О3 поворота, лежащего за пределами оси инструментодержателя 10 (функционально являющейся и осью 20 инструмента 9).
- пространственно разнесенных центров О3 и O4 поворота, лежащих за пределами оси инструментодержателя 10 (функционально являющейся и осью 20 инструмента 9).
- пространственно разнесенных центров O1 и О3 поворота.
В качестве металлорежущего станка может быть использован гравировально-строгальный станок.
В качестве металлорежущего станка может быть использован гравировально-фрезерный станок, оснащенный независимым приводом вращения инструмента 9. При этом инструментодержатель 10 должен быть кинематически связан с сопряженным с ним узлом 19 дополнительного перемещения инструмента 9 с возможностью относительного вращения, а с автономным независимым приводом вращения инструмента 9 - посредством гибкого передаточного звена, например, гибкого вала, функционально являющегося шпинделем 4 станка.
Совершенно очевидно, что при использовании в качестве металлорежущего станка строгального станка в случае необходимости поворота инструмента 9 вокруг собственной оси 20 с целью обеспечения ориентации его передней поверхности относительно направления резания (т.е. при криволинейной траектории главного формообразующего перемещения) необходимо использовать конструкцию шпиндельного узла, аналогичную вышеописанной для гравировально-фрезерного станка. То есть, инструментодержатель 10 должен быть кинематически связан с сопряженным с ним узлом 19 дополнительного перемещения инструмента 9 с возможностью относительного вращения, а с независимым приводом вращения инструмента 9 - посредством гибкого передаточного звена, например, гибкого вала, функционально являющегося шпинделем 4 станка.
При использовании в качестве металлорежущего станка гравировально-строгального станка в качестве режущего инструмента 9 может быть использован:
- строгальный резец с треугольной формой передней поверхности, а центр O2 поворота оси инструментодержателя 10 может быть совмещен, в пределах технологического допуска, с вершиной резца;
- строгальный резец с трапециевидной формой передней поверхности, а центр О2 поворота оси инструментодержателя 10 может быть совмещен, в пределах технологического допуска, с точкой пересечения этой оси с поперечной режущей кромкой резца;
- строгальный резец, режущая часть которого имеет форму трехгранной пирамиды, каждая грань которой функционально является передней поверхностью резца.
При использовании в качестве металлорежущего станка гравировально-фрезерного станка в качестве режущего инструмента может быть использована фреза преимущественно треугольного или трапециевидного профиля.
Первый и/или второй узлы 19 и 21 дополнительного перемещения инструмента 9 могут быть выполнены в виде плоских и/или пространственных шарнирных механизмов, кинематически связывающих инструментодержатель 10 с гильзой 5 или со шпинделем 4 станка, а управление ими (т.е. шарнирными механизмами) может быть осуществлено посредством программно организованной системы независимых приводов электромеханического, и/или магнитомеханического, и/или электромагнитного типов (в графических материалах условно не показаны, поскольку они широко известны из уровня техники и не являются объектами защиты в рамках настоящей заявки).
Оптимально узлы 19 и 21 дополнительного перемещения инструмента 9, обеспечивающие дополнительные модулирующие перемещения с меньшими периодами циклов и/или амплитудой дифференциальных колебательных процессов инструмента 9, последовательно размещать в непосредственной близости по отношению к инструментодержателю 10.
Это позволяет снизить инерционные показатели высокочастотных узлов перемещения и, как следствие, использовать для их перемещения независимые приводы относительно небольшой мощности.
Целесообразно, чтобы узлы 19 и 21 дополнительного перемещения инструмента 9 были конструктивно скомпонованы таким образом, чтобы подвижное звено каждого последующего шарнирного механизма функционально являлось базовым звеном предыдущего шарнирного механизма, предназначенным для базирования на нем программно организованного независимого привода перемещения подвижного звена этого предыдущего шарнирного механизма.
Данная конструктивная особенность позволяет уменьшить массогабаритные показатели системы узлов 19 и 21 и, как следствие, оптимизировать их инерционные свойства.
Как правило, координатно организованная система главного формообразующего перемещения инструмента 9 выполнена трехкоординатной с ортогональным расположением осей X, Y, Z, а исполнительная система позиционирования и относительного рабочего перемещения инструмента 9 содержит механизм вращательного движения инструмента 9 с независимым приводом.
Техническая сущность подготовки к работе и работы прецизионного строгального станка автоматизированного гравировального комплекса для реализации заявленного способа заключается в следующем.
Перед формированием реперной координатной системы X1Y1Z1 осуществляют коррекцию исходных управляющих программ системы ЧПУ (например, типа CNC модели Sinumerik 840Di) на отклонение от плоскостности рабочей поверхности функционального слоя заготовки 27. При этом заготовку 22 предварительно закрепляют на установочной поверхности позиционирующего устройства 8 для пространственной ориентации и ориентируют вдоль плоскости XY ортогональной координатной системы XYZ отсчета станка (т.е. осуществляют предварительное позиционирование).
Предварительное позиционирование закрепленной заготовки 27 посредством устройства 8 для пространственной ориентации перед оцифровкой осуществляют посредством определения и регистрации соответствующими средствами измерения значений координат «z», по меньшей мере, трех, не лежащих на одной прямой, точек рабочей поверхности функционального слоя заготовки 22 и последующего выравнивания в диапазоне допустимых отклонений величин этих значений посредством периферийных регулировочных узлов устройства 8 для пространственной ориентации заготовки 22.
Для осуществления упомянутой коррекции исходных управляющих программ производят оцифровку по координатам «z» множества (расположенных с заданным шагом) точек рабочей поверхности функционального слоя заготовки 22 на участке оцифровки, форма и площадь которого регламентируется формой и площадью формируемого на этой поверхности рисунка гравюры. Оцифровку начинают с наиболее удаленной от центра участка оцифровки точки и продолжают посредством сканирования участка оцифровки средствами измерения с обеспечением регистрации значений координаты «z» в каждой точке оцифровки и автоматической коррекции управляющих программ ЧПУ по результатам оцифровки.
Оцифровка рабочей поверхности функционального слоя заготовки 22 является технологической операцией, необходимой для корректного формирования рисунка гравюры на этой поверхности. Как правило, поверхность заготовки 22 имеет плавное изменение геометрии (в частности, высоты неровностей относительно плоскости ХУ координатной системы отсчета станка). Чтобы учесть это изменение производится вышеупомянутая оцифровка заготовки 22. Для этого могут применяться различные известные из уровня техники средства измерения, которые делятся на контактные и бесконтактные. Например, индуктивный датчик, используемый в рассматриваемом автоматизированном гравировальном комплексе, является контактным. К бесконтактным средствам измерения относятся, например, интерферометры и лазерные измерители. Последние имеют важное преимущество перед контактными, поскольку нет необходимости подъема/опускания датчика над поверхностью заготовки 22, для того чтобы не повредить ее зеркальную рабочую поверхность в процессе сканирования. Однако стоимость лазерного измерителя значительно выше стоимости контактного датчика.
Другим недостатком контактного измерителя является наличие в нем инерционного элемента (т.е. пружины), что требует соответствующего учета (в частности, определения временного интервала выдержки для погашения колебательных процессов) при регистрации измеряемого значения.
Оцифровка заготовки 22 осуществляется с помощью установленного в гнездо инструментодержателя 10 на место инструмента 9 индуктивного датчика, подключенного к индуктивному преобразователю. Индуктивный преобразователь имеет аналоговый выход, на котором формируется выходной сигнал в виде уровня напряжения. Выходной сигнал, подается на один из входов платы аналогово-цифрового преобразования (АЦП), установленной в персональной электронно-вычислительной машине (ПЭВМ) системы ЧПУ.
Для избежания помех, в том числе вырабатываемых импульсным источником питания индуктивного преобразователя, подключение производится по дифференциальной схеме.
На входе платы АЦП максимальному значению (верхняя граница диапазона) соответствует напряжение +5 В, а минимальному (нижняя граница диапазона) -5 В. Разрядность АЦП составляет 12 бит. Таким образом, при максимальном входном диапазоне ±5 В дискретность составит 0.0025 В. Следовательно, при максимальном диапазоне измерений индуктивного преобразователя ±100 мкм дискретность измерений составит 0.05 мкм.
Таким образом, для организации процесса оцифровки, необходимо
- определить габариты формируемого на рабочей поверхности функционального слоя заготовки 22 рисунка гравюры;
- назначить величину шага между соседними точками оцифровки;
- сформировать набор кадров (команд) для их отработки на станке;
- определить время выдержки, необходимое для погашения колебательных воздействий пружины индуктивного датчика на результат измерения;
- организовать последовательный обход каждой из точек оцифровки (т.е. сканирование участка оцифровки).
Шаг между соседними точками оцифровки выбирается исходя из плотности элементов рисунка гравюры и качества рабочей поверхности функционального слоя используемой заготовки 22.
Формирование набора кадров (команд) подразумевает создание последовательности команд для организации процесса оцифровки. Так как применяется контактное средство измерения (т.е. индуктивный датчик), то существует необходимость для поднятия индуктивного датчика над рабочей поверхностью функционального слоя заготовки 22 при его перемещении (в процессе сканирования) к следующей точке оцифровки.
Коррекция управляющих программ системы ЧПУ на отклонение от плоскостности рабочей поверхности функционального слоя заготовки 22 (коррекция по координате Z) учитывает неровности рабочей поверхности функционального слоя заготовки 22 (на которой производится формирование рисунка гравюры). По результатам оцифровки вносятся соответствующие изменения в исходную управляющую программу по координате Z.
После осуществления операции оцифровки и соответствующей коррекции исходных управляющих программ системы ЧПУ формируют ортогональную реперную координатную систему X1Y1Z1.
Реперную координатную систему X1Y1Z1 формируют от начальной точки (x1=0, y1=0, z1=0) оцифровки (функционально являющейся нулевой точкой этой системы), координаты которой (перед началом обработки) уточняют посредством обеспечения механического контакта вершины инструмента 9 (закрепленного в инструментодержателе 10) с рабочей поверхностью функционального слоя заготовки 22 в этой точке с последующей адаптацией реперной координатной системы X1Y1Z1 с нулевой точкой отсчета исходных управляющих программ.
Упомянутую адаптацию осуществляют через пространственную координатную привязку нулевой точки координатной системы X1Y1Z1 к нулевой точке ортогональной координатной системы XYZ отсчета станка, пространственно адаптированной с нулевой точкой отсчета исходных управляющих программ системы числового програмного управления (ЧПУ).
Исходные управляющие программы предназначены для формирования фрагментов объемного рисунка гравюры в функциональном слое заготовки 22, которую (как ранее указывалось) предварительно закрепляют и позиционируют на установочной поверхности устройства 8 для пространственной ориентации относительно плоскости XY координатной системы XYZ. Исходные управляющие программы для формирования рисунка гравюры на рабочей поверхности функционального слоя заготовки 22 составляется (базируется) от некоторой исходной точки формируемого рисунка гравюры, координаты которой программно адаптированы с вышеупомянутой нулевой точкой отсчета реперной координатной системы X1Y1Z1.
После завершения формирования и соответствующей привязки реперной координатной системы X1Y1Z1 к нулевой точке отсчета управляющих программ осуществляют позиционирование непосредственно режущей части инструмента 9 (в частности, его вершины) относительно нулевой точки отсчета управляющих программ, координатно адаптированной с координатной системой XYZ станка (т.е. с нулевой точкой этой системы).
Для этого осуществляют операции фотографирования передней поверхности режущей части инструмента 9, позицирования его вершины по трем координатам относительно нулевой точки сформированной реперной системы X1Y1Z1 и коррекции по координатам «x1» и «y1» проходящей через эту вершину продольной оси 20 инструмента 9 относительно параллельной оси Z или Z1 действительной оси вращения инструментодержателя 10. При этом обеспечивают визуальные отображения результатов упомянутых операций фотографирования, позиционирования и коррекции на экране монитора 11 управляющего механизмами перемещения станка компьютера 12, а также координатную адаптации этих результатов с управляющими программами системы ЧПУ
Для реализации этих процессов используют оптико-электронную измерительную систему. Данная система включает телевизионный компьютерный микроскоп 13, который (как ранее указывалось) стационарно закрепляют на основном столе 7 станка таким образом, что главная оптическая ось 14 его объектива 15 ориентирована по направлению возвратно-поступательного перемещения основного стола 7 станка вдоль осей Х (или X1) соответствующих координатных систем и координатно адаптирована с нулевой точкой координатной системы X1Y1Z1.
Таким образом, переднюю поверхность режущей части инструмента 12 (резца) вводят в поле зрения объектива 15 упомянутого микроскопа 13, его вершину совмещают с перекрестием ортогональных осей на экране монитора 11, которое расположено на главной оптической оси 14 упомянутого объектива 15, и осуществляют поворот инструментодержателя 10 на угол в пределах 360°.
Резец вводится в область поля зрения объектива 15 телевизионного микроскопа 13 в ручном режиме после его заточки и установки в инструментодержатель 10 станка. Поворот инструментодержателя вокруг его оси, по меньшей мере, на угол в 360° осуществляется для выявления величины радиального смещения в плоскости XY (или
X1Y1) вершины резца (или продольной оси, проходящей через эту вершину, что равнозначно) относительно реальной оси вращения инструментодержателя 10. Поправка на величину выявленного смещения вводится в исходную программу ПЭВМ системы ЧПУ с соответствующей коррекцией этой программы в отношении данного конкретного инструмента 9.
Иными словами, в ручном режиме вершина резца корректируется по центру оптических осей объектива 15 телевизионного микроскопа 13 (визуально отображенных на экране монитора ПЭВМ в увеличенном масштабе), перекрестие которых изначально координатно адаптировано с нулевой точкой отсчета исходных управляющих программ.
В процессе технологического цикла обработки (т.е. после заданного числа отработанных управляющих программ или их файлов) инструмент 9 может автоматически (посредством откорректированной исходной программы ПЭВМ) вводиться в координатно зафиксированную (вышеописанными методами) точку, расположенную в поле зрения телевизионного микроскопа 13 (т.е. точку, совпадающую с перекрестием ортогональных оптических осей объектива 15) для фотографирования режущей части инструмента 9 с целью обеспечения контроля ее качества и оценки пригодности инструмента 9 для дальнейшей обработки. После каждого фотографирования инструмент 9 возвращается (также в автоматическом режиме) в ту же точку рабочей поверхности заготовки, на которой был прерван технологический цикл обработки.
Прецизионная обработка изделий со сложным пространственным профилем обрабатываемой поверхности (например, металлографских форм) требует точного выполнения и сопряжения участков с различной формой и профилем формируемого рельефа. Поскольку размеры используемого для данной обработки инструмента 9 могут быть аттестованы с погрешностью того же порядка, что и технологически заданные допуски на изготовление гравюр, а при смене инструмента 9, кроме того, возникают дополнительные погрешности положения вершины (и соответственно режущей кромки) инструмента 9, возникает необходимость после каждой смены инструмента 9 обеспечивать точную проверку фактического положения его вершины (режущей кромки) относительно нулевой точки реперной координатной системы X1Y1Z1 отсчета станка с последующей коррекцией упомянутого фактического положения рабочих элементов инструмента 9 относительно этой координатной системы. Аналогичная ситуация (в отношении необходимости коррекции фактического положения инструмента 9 в координатной системе отсчета станка) может возникнуть и в ряде иных случаев (например, при величине накопленной ошибки перемещения в механизмах позиционирующих узлов станка выше предельно допустимой). Причем при осуществлении обработки изделий со сложной пространственно ориентируемой структурой формируемого рельефа коррекцию положения вершины (режущей ккромки) инструмента 9 необходимо осуществлять по трем координатам X1, Y1 и Z1 координатной системы отсчета станка.
Ввиду того, что согласно заявленному техническому решению визуальное отображение привязки к сформированной реперной системе X1Y1Z1 станка на экране 16 монитора 11 осуществляется в виде пересекающихся под прямым углом соответствующих осей, при соответствующем программном обеспечении в процессе реализации вышеописанного способа позиционирования инструмента 9 можно обеспечить измерение геометрических параметров и электронное фотографирование режущей части инструмента 9, например, для создание банка данных инструментов 9 и т.п.
Такая коррекция управляющих программ снижает в процессе последующей обработки примерно в два раза погрешность, возникающую вследствие эксцентричного расположения вершины инструмента 9 относительно оси поворота инструментодержателя 10.
Таким образом, позиционирование и отсчет перемещений инструмента 9 в процессе формирования фрагментов объемного рисунка гравюры в функциональном слое заготовки 22 ведут от упомянутой нулевой точки реперной системы X1Y1Z1 согласно исходным управляющим программам системы ЧПУ с учетом коррекции по координатам «x1» и «y1» продольной оси инструмента 9 (проходящей через его вершину) относительно действительной оси вращения инструментодержателя 10 станка (параллельной оси Z или Z1), а также коррекции по результатам оцифровки.
Следует отметить, что упомянутые операции фотографирования передней поверхности режущей части инструмента 9, позицирования его вершины по трем координатам относительно нулевой точки сформированной реперной системы X1Y1Z1 и коррекции по координатам «x1» и «y1» продольной оси инструмента 9 относительно действительной оси вращения инструментодержателя 10 посредством оптико-электронной измерительной системы целесообразно осуществлять в прямом и теневом свете. Для этого упомянутую измерительную систему оснащают отражающим экраном 23, расположенным в поле зрения объектива 15 телевизионного компьютерного микроскопа 13 позади зоны ввода инструмента 9 в это поле, а также двумя осветителями 17 и 18. Один из осветителей 17 в этом варианте реализации способа позиционирования инструмента 9 необходимо устанавливать с возможностью осуществления подсветки экрана 23, а другой осветитель 18 - с возможностью осуществления подсветки передней поверхности режущей части инструмента 9.
Данный вариант конструктивного исполнения оптико-электроной измерительной системы изображен на фиг.13.
Данная система стационарно устанавливается на основном столе 7 станка (осуществляющим возвратно-поступательное перемещение вдоль оси Х /или X1/ соответствующих координатных систем станка).
Между телевизионной камерой 24 и объективом 15 телевизионного компьютерного микроскопа 13 установлены удлинительные кольца 25. Оптико-электронная часть измерительной системы фиксируется на двух стойках 26 и 27 с регулируемой высотой. Выбранная высота закрепляется фиксатором 28. Осветители 17 и 18, а также экран 23 закреплены на третьей стойке 29 и регулируются по высоте одновременно с оптико-электронной частью.
Телевизионная камера 24 соединяется с компьютером 12 телевизионным кабелем посредством установленной в нем платы видеозахвата, например, модели EZ Capture фирмы Aver Media. В качестве телевизионной камеры 24 может быть использована черно-белая телекамера RC - 583С с встроенным блоком питания, а в качестве осветителей 17 и 18 - осветители светодиодные белого света марки «Porta».
Использование в оптико-электронной измерительной системе отражающего экрана 23 и двух осветителей 17 и 18 позволяет повысить контрастность изображения режущей части инструмента 9 (в особенности ее границ, т.е. режущих кромок) на экране 16 монитора 11, что повышает качество и эффективность контроля его параметров в режиме автоматического фотографирования.
На базе откорректированных исходных управляющих програм на станке рассматриваемого автоматизированного гравировального комплекса может выполняться строгание и фрезерование канавок различной формы постоянной или переменной глубины (прямолинейные, круговые, синусоидальные, сложной формы) и семейства этих канавок, в том числе пересекающиеся друг с другом.
Для выполнения перечисленных видов работ (помимо технологических возможностей, непосредственно вытекающих из технических характеристик станка) предусмотрены следующие вспомогательные технологические циклы и приемы, обеспечиваемые конструкцией станка и управляющими программами:
- коррекция положения точек рабочей поверхности функционального слоя заготовки по координате Z с учетом микронеровностей этой поверхности (оцифровка);
- определение положения и координатная привязка рабочей поверхности (т.е. нулевой точки отсчета реперной системы X1Y1Z1) функционального слоя заготовки относительно координатной системы отсчета станка;
- определение погрешностей заточки и установки инструмента 9 в инструменте держателе 10 станка и коррекция управляющих программ на основе полученных данных.
Непосредственно технология обработки изделия (т.е. конкретные схемы резания) на рассматриваемом прецизионном гравировальном станке подробно не раскрывается, поскольку является технологическим «НОУ-ХАУ».
Однако целесообразно отметить некоторые особенности технологии обработки.
В частности, в используемой на рассматриваемом строгальном станке технологии резания необходимо придерживаться условия минимизации контакта задней поверхности резца с поверхностью резания (т.е. условия расположения упомянутой задней поверхности резца в области уже снятого припуска на протяжении всего прохода резца). Данное условие наиболее просто может быть реализовано при углах расположения передней поверхности инструмента по отношению к поверхности резания отличных, но близких 90°, причем в достаточно широком диапазоне (при определенной, не раскрываемой в рамках настоящей заявки, схеме резания). Кроме того, широкий диапазон допустимых углов расположения передней поверхности инструмента по отношению к поверхности резания позволяет в значительной степени упростить программное обеспечение системы ЧПУ станка без снижения качества и точности обработки.
Следует отметить, что формирование каждой профильной структуры на полную глубину согласно заявленному техническому решению может быть осуществлено как за один проход инструмента, так и за несколько проходов (в зависимости от соотношения глубины /высоты/ данной структуры к ее ширине, или от объема материала в удаляемом припуске).
В связи с этим при однопроходной обработке дополнительные перемещения инструменту 9 (посредством поворота его оси 20) целесообразно осуществлять непосредственно в процессе главного формообразующего перемещения инструмента 9. Это позволяет повысить производительность технологического процесса формирования профильных структур в целом, а также повысить точность обработки в связи с исключением дополнительной погрешности обработки, накапливаемой в кинематических цепях исполнительной системы позиционирования и относительного рабочего перемещения инструмента 9 станка.
В случае многопроходной обработки дополнительные перемещения инструмента 9 (посредством поворота его оси 20) целесообразно осуществлять только в процессе чистовых проходов главного формообразующего перемещения инструмента 9.
Совершенно очевидно, что посредством сообщения дополнительных перемещений инструменту 9 (посредством поворота его оси 20 в заданных плоскостях на заданный угол и с заданной частотой изменения направления этих перемещений) можно формировать как визуально воспринимаемые элементы защиты от подделки (т.е. дополнительные микроструктуры на поверхности формируемых в функциональном слое профильных структур), так и визуально невоспринимаемые (т.е. дополнительные наноструктуры), однако считываемые машинным способом посредством соответствующих детекторов.
Совершенно очевидно, что посредством вышеуказанных дополнительных микроструктур на поверхности формируемых в функциональном слое профильных структур можно формировать и кодовую информацию, визуально невоспринимаемую, однако считываемую и декодируемую машинным способом посредством соответствующих детекторов с декодерами.
Здесь следует отметить, что дополнительные перемещения инструмента 9 могут осуществляться посредством нижеперечисленных технологических режимов функционирования.
Дискретно-статический режим функционирования.
Режим, при котором поворот оси инструмента 9 на заданный угол в определенной плоскости (плоскостях) осуществляют однократно до начала осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается изменение на постоянные величины углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных профильных структур по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане.
Дискретно-динамический режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) на заданный угол в течение заданного промежутка времени осуществляют однократно, причем в процессе осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается изменение на постоянную величину углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных профильных структур по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане. При этом упомянутый заданный угол в каждой плоскости поворота является константой в течение упомянутого заданного промежутка времени.
Импульсный режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют импульсно через заданные промежутки времени в процессе осуществления цикла обработки. То есть, в зависимости от пространственного расположения плоскостей поворота обеспечивается дискретное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на участках траектории перемещения инструмента 9, формируемых в период времени между импульсами.
Импульсный циклический режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют импульсно через заданные промежутки времени в процессе осуществления цикла обработки. Причем в течение периода импульса инструмент 9 возвращается в исходное положение. То есть, обеспечивается плавное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на участках траектории перемещения инструмента 9, формируемых в течение периода импульса.
Непрерывный режим функционирования.
Режим, при котором поворот оси инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов осуществляют непрерывно в процессе осуществления цикла обработки. То есть, обеспечивается непрерывное плавное изменение углов наклона боковых стенок и (в случае использования режущего инструмента с трапецеидальным сечением) дна формируемых основных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на всей траектории перемещения инструмента 9.
Непрерывный циклический режим функционирования.
Режим, при котором поворот оси 20 инструмента 9 в определенной плоскости (плоскостях) в заданном диапазоне углов «α» осуществляют непрерывно по замкнутому циклу в процессе осуществления цикла обработки. То есть, в течение периода замкнутого цикла инструмент 9 возвращается в исходное положение. То есть, обеспечивается непрерывное, плавное, циклически повторяющееся изменение углов наклона боковых стенок и (в случае использования режущего инструмента 9 с трапецеидальным сечением) дна формируемых основных профильных структур в заданном диапазоне по отношению к плоскости функционального слоя изделия, а также глубины формируемой канавки и ее ширины в плане на всей траектории перемещения инструмента 9.
Совершенно очевидно, что на заявленном программно-аппаратном комплексе может быть реализован и интегрированный режим формирования каждой профильной структуры (канавки или выступа) и/или семейства данных структур, организованный посредством различного сочетания вышерассмотренных режимов функционирования.
Некоторые примеры изменения поперечного и продольного профиля, а также формы в плане формируемых дискретных профильных структур посредством сообщения инструменту 9 дополнительных модулирующих перемещений приведены на фиг.8-12.
Точность формирования дополнительных микро- и наноструктур известными из современного уровня техники средствами перемещения микрометрического диапазона обеспечивается за счет редуцирования (в частности, уменьшения) величины перемещения режущей части инструмента 9 по отношению к величине перемещения исполительных элементов упомянутых известных средств перемещения на величину коэффициента редукции, который определяется пространственным расположением центра поворота оси 20 инструмента 9 относительно точки приложения внешней нагрузки (со стороны средства перемещения) и вершины инструмента 9.
Совершенно очевидно, что посредством заявленного технического решения обеспечивается возможность формирования с микро- и нанометрической точностью неограниченного множества вариаций профиля и формы в плане формируемых в функциональном слое изделия профильных структур рисунка гравюры, а также дополнительных микро- и наноструктур (функционально являющихся дополнительными элементами защиты изделия от подделки), расположенных на соответствующих поверхностях основных профильных структур (причем на известном из уровня техники станочном оборудовании и с помощью известных из уровня техники средств перемещения с миллиметровой или микрометрической дискретностью шага перемещения).
В качестве примера на фиг.14 графически проиллюстрирована траектория интегрального формообразующего перемещения (кривая Yi) инструмента, формируемого посредством главного формообразующего перемещения (кривая Y1i), а также двух дополнительных перемещений (кривые Y2i и Y3i), которые (т.е. указанные кривые) программно организованы в соответствии со следующими исходными данными и функциями:



Таким образом, заявленный способ может быть использован для автоматизированной мехатронной обработки резанием функционального слоя изделия со сложным пространственным профилем и формой (в плане) формируемых в функциональном слое профильных структур фрагментов рисунка гравюры с высокой степенью точности при обеспечении возможности, преимущественно, одновременного (т.е. в реальном режиме времени) формирования на поверхности упомянутых профильных структур дополнительных микро- и/или наноструктур, функционально являющихся специальными, дополнительными, как правило, программно-организованными (т.е. машиносчитываемыми) элементами защиты изделия от подделки (т.е. несанкционированного воспроизводства) при использовании известного из уровня техники станочного оборудования. Например, заявленный способ может быть успешно реализован при изготовлении печатных форм для металлографской печати, используемых для производства денежных знаков (банкнот) и иных ценных бумаг, что подтверждает соответствие заявленного технического решения условию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИНСТРУМЕНТА В КООРДИНАТНОЙ СИСТЕМЕ ОТСЧЕТА СТАНКА АВТОМАТИЗИРОВАННОГО ГРАВИРОВАЛЬНОГО КОМПЛЕКСА | 2005 |
|
RU2279964C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ МЕТАЛЛОГРАФСКОЙ ФОРМЫ НА АВТОМАТИЗИРОВАННОМ ГРАВИРОВАЛЬНОМ ПРОГРАММНО-АППАРАТНОМ КОМПЛЕКСЕ | 2011 |
|
RU2470746C1 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ РЕЗАНИЕМ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО АГРЕГАТА | 2010 |
|
RU2446034C1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ ПОСРЕДСТВОМ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ С ИСПОЛЬЗОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО ЦЕНТРА | 2010 |
|
RU2446916C1 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ И ФУНКЦИОНАЛЬНЫМ СЛОЕМ ПОНИЖЕННОЙ ЖЕСТКОСТИ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА | 2010 |
|
RU2446033C1 |
| СПОСОБ ФОРМИРОВАНИЯ РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ИЗДЕЛИЯ МЕТОДОМ МНОГОПРОХОДНОГО СТРОГАНИЯ НА СТАНКАХ С ЧПУ И СТРОГАЛЬНЫЙ РЕЗЕЦ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2296036C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОБЪЕМНЫХ МИКРОСТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ МЕТАЛЛОГРАФСКОЙ ФОРМЫ НА АВТОМАТИЗИРОВАННОМ ГРАВИРОВАЛЬНОМ ПРОГРАММНО-АППАРАТНОМ КОМПЛЕКСЕ (ВАРИАНТЫ) | 2011 |
|
RU2467858C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОЛУТОНОВОГО ИЗОБРАЖЕНИЯ В ФУНКЦИОНАЛЬНОМ СЛОЕ ИЗДЕЛИЯ | 2007 |
|
RU2355586C1 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЙ СТРОГАНИЕМ | 2004 |
|
RU2282524C2 |
Способ включает осуществление главного формообразующего перемещения инструмента относительно поверхности функционального слоя печатной формы с использованием программно-организованной координатной исполнительной системы перемещения. Для расширения функциональных возможностей в процессе главного формообразующего перемещения инструмента осуществляют модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур посредством формирования интегрального формообразующего перемещения инструмента. При этом инструменту сообщают по меньшей мере одно дополнительное модулирующее перемещение посредством циклического поворота его продольной оси в пределах заданного угла в по меньшей мере одной плоскости. 20 з.п. ф-лы, 14 ил.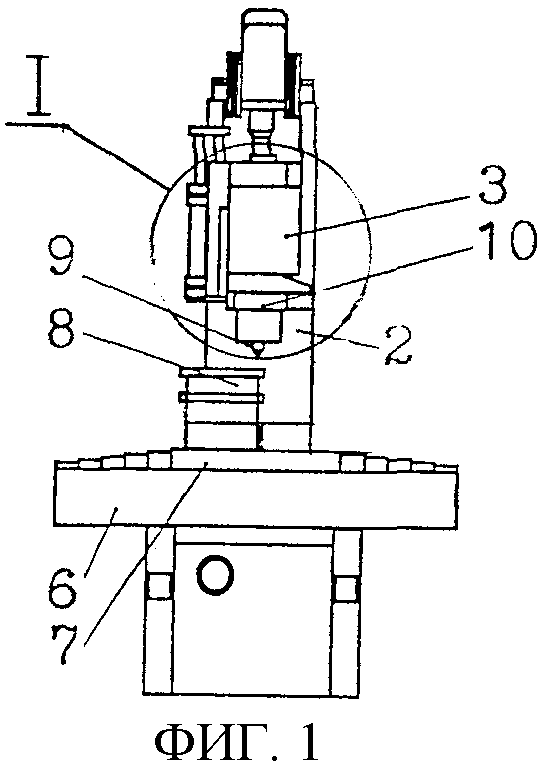
1. Способ формирования дискретных профильных структур рисунка гравюры в функциональном слое печатной формы на металлорежущем станке, при котором осуществляют главное формообразующее перемещение инструмента относительно поверхности функционального слоя печатной формы с использованием программно-организованной координатной исполнительной системы перемещения, отличающийся тем, что в процессе главного формообразующего перемещения инструмента осуществляют модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур посредством формирования интегрального формообразующего перемещения инструмента, при этом инструменту сообщают по меньшей мере одно дополнительное модулирующее перемещение посредством циклического поворота его продольной оси в пределах заданного угла в по меньшей мере одной плоскости.
2. Способ по п.1, отличающийся тем, что в процессе интегрального формообразующего перемещения инструмента осуществляют модуляцию регламентируемых этим перемещением геометрических параметров профиля и/или формы в плане дискретных профильных структур посредством формирования производного интегрального формообразующего перемещения инструмента, которому сообщают второе дополнительное модулирующее перемещение посредством циклического поворота его продольной оси на заданный угол в плоскости, совмещенной, в пределах технологического допуска, с плоскостью поворота оси инструмента, обеспечиваемого первым дополнительным модулирующим перемещением, при этом первое и второе дополнительные модулирующие перемещения осуществляют с различными периодами циклов и амплитудой дифференциальных колебательных процессов инструмента.
3. Способ по п.1 или 2, отличающийся тем, что модуляцию упомянутых формообразующих перемещений инструмента осуществляют в дискретно-статическом и/или дискретно-динамическом, и/или импульсном, преимущественно циклическом, и/или непрерывном, преимущественно циклическом технологических режимах функционирования.
4. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно одного центра поворота, лежащего, в пределах технологического допуска, на оси инструмента.
5. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно одного центра поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента.
6. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно пространственно-разнесенных центров поворота, лежащих, в пределах технологического допуска, на оси инструмента.
7. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно одного центра поворота, лежащего, в пределах технологического допуска, за пределами оси инструмента.
8. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно пространственно-разнесенных центров поворота, лежащих, в пределах технологического допуска, за пределами оси инструмента.
9. Способ по п.1 или 2, отличающийся тем, что циклический поворот продольной оси инструмента осуществляют относительно пространственно-разнесенных центров поворота.
10. Способ по п.1, отличающийся тем, что технологический процесс формирования дискретных профильных структур осуществляют на металлорежущем станке в виде гравировально-строгального станка.
11. Способ по п.1, отличающийся тем, что технологический процесс формирования дискретных профильных структур осуществляют на металлорежущем станке в виде гравировально-фрезерного станка.
12. Способ по п.10, отличающийся тем, что в качестве режущего инструмента используют резец с треугольной формой передней поверхности, а циклический поворот его оси осуществляют относительно центра поворота, совмещенного, в пределах технологического допуска, с вершиной инструмента.
13. Способ по п.10, отличающийся тем, в качестве режущего инструмента используют резец с трапециевидной формой передней поверхности, а циклический поворот его оси осуществляют вокруг центра поворота, совмещенного, в пределах технологического допуска, с точкой пересечения его оси с поперечной режущей кромкой инструмента.
14. Способ по п.10, отличающийся тем, что в качестве режущего инструмента используют резец, режущая часть которого имеет форму трехгранной пирамиды, каждая грань которой функционально является передней поверхностью резца.
15. Способ по п.11, отличающийся тем, что в качестве режущего инструмента используют коническую фрезу.
16. Способ по п.1 или 2, отличающийся тем, что первое и/или второе модулирующие перемещения инструмента осуществляют в двух плоскостях, пересекающихся под углом, близким или равным 90°, при этом одну из упомянутых плоскостей ориентируют вдоль вектора мгновенной скорости главного формообразующего перемещения инструмента.
17. Способ по п.1 или 2, отличающийся тем, что в качестве средств обеспечения циклического поворота оси инструмента в заданной плоскости используют систему плоских и/или пространственных шарнирных механизмов, кинематически связывающих инструментодержатель со шпиндельной бабкой станка, управление которыми осуществляют посредством программно-организованной системы независимых приводов электромеханического и/или магнитомеханического, и/или электромагнитного типов.
18. Способ по п.1 или 2, отличающийся тем, что средства обеспечения циклического поворота оси инструмента в заданной плоскости, обеспечивающие дополнительные модулирующие перемещения с меньшими периодами циклов и/или амплитудой дифференциальных колебательных процессов инструмента, последовательно размещают в непосредственной близости к инструментодержателю.
19. Способ по п.17, отличающийся тем, что в качестве подвижного звена каждого последующего шарнирного механизма упомянутых средств поворота используют базовое звено предыдущего шарнирного механизма, предназначенное для базирования на нем программно-организованного независимого привода перемещения подвижного звена этого шарнирного механизма.
20. Способ по п.1, отличающийся тем, что в качестве координатной исполнительной системы перемещения инструмента используют трехкоординатную систему с ортогональным расположением осей.
21. Способ по п.1, отличающийся тем, что в процессе осуществления главного формообразующего перемещения инструменту дополнительно сообщают вращательное движение посредством независимого привода.
| Приспособление для уплотнения шарниров всасывающих массопроводных труб | 1936 |
|
SU48164A1 |
| УСТРОЙСТВО для МЕХАНИЧЕСКОЙ ЗАПИСИ ИЗОБРАЖЕНИЯ | 0 |
|
SU342213A1 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЙ СТРОГАНИЕМ | 2004 |
|
RU2282524C2 |
| СПОСОБ ПОЛУЧЕНИЯ РЕЛЬЕФА В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2001 |
|
RU2299813C2 |
| Газогенератор для автомобилей и тракторов | 1929 |
|
SU14022A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

