Изобретение относится к землеройным машинам и в частности к машинам для нарезания щелей и прокладки кабелей в донном грунте водоемов.
Известна баровая машина для прокладки подводного кабеля, принятая в качестве прототипа (SU 1529803, E02F 5/06). Известная машина содержит прицепной понтон, с герметичным корпусом и с размещенным внутри приводом в виде двигателя и редуктора, на выходных валах которого закреплены ведущие звездочки баровых рабочих органов, направляющие кабеля, механизм закрытия щели грунтом и тяговую лебедку.
Недостатки известного технического решения заключаются в том, что оно имеет низкую производительность и недостаточную надежность. Низкая производительность обусловлена отсутствием возможности регулировать скорость перемещения понтона с рабочим оборудованием, в зависимости от вида и состояния разрабатываемого грунта. Поэтому, при разработке грунтов малой прочности действительная скорость понтона оказывается меньше возможной, что уменьшает производительность. Напротив, при разработке участков грунта, имеющего высокую прочность, действительная скорость превышает возможную, что увеличивает нагрузку на рабочие органы и может вызвать их деформацию и поломку и это существенно снижает надежность известной машины. Кроме того, надежность снижают криволинейные направляющие кабеля, создающие большое сопротивление при перемещении понтона. Величину этого сопротивления еще более увеличивает абразивный грунт во взвешенном состоянии, окружающий рабочие органы под действием потока воды из трубы с насадками. Это может вызвать повреждение и обрыв кабеля. Целью предлагаемого изобретения является уменьшение или устранение недостатков известного технического решения. Техническая задача, решаемая предлагаемым изобретением, заключается в автоматизации регулирования величины скорости перемещения понтона с рабочим оборудованием, в соответствии с видом и состоянием разрабатываемого грунта, а также в уменьшении сил трения в направляющих кабеля. Технический результат -повышение производительности и надежности.
Решение поставленной задачи и достижение технического результата обеспечивается тем, что, базовая машина для прокладки подводного кабеля, содержащая прицепной понтон с герметичным корпусом и с размещенным внутри приводом в виде двигателя и редуктора, на выходных валах которого закреплены ведущие звездочки баровых рабочих органов, направляющие кабеля, механизм закрытия щели грунтом и тяговую лебедку, снабжена направляющими кабельными колесами, гидроцилиндрами опускания рабочих органов, гидроаккумуляторами, регулируемыми редукционными гидроклапанами, зарывающими скребками, регулируемым гидродвигателем, гидроцилиндрами управления и конечными выключателями.
Орган управления гидродвигателя привода барабана тяговой лебедки соединен шарнирно со штоком первого гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости, а штоковая полость сообщена гидролинией со штоковой полостью второго гидроцилиндра управления, на штоке которого закреплен направляющий блок тягового каната привода понтона.
Направляющие колеса кабеля установлены с возможностью свободного вращения.
Механизмы закрытия щели грунтом выполнены в виде угловых скребков, шарнирно прикрепленных к рамам рабочих органов посредством рычагов, а рамы рабочих органов, посредством рычагов, шарнирно соединены со штоками гидроцилиндров опускания, поршневые полости которых сообщены с гидроаккумуляторами, соединенными с выходами регулируемых редукционных гидроклапанов.
Конечные выключатели перемещения рам рабочих органов соединены электролиниями управления с выключателями двигателей привода рабочих органов и привода перемещения понтона.
Резцы на цепи рабочего органа установлены под углом относительно продольной ее оси.
Предложенная баровая машина для прокладки подводного кабеля отличается от прототипа совокупностью отличительных признаков, приведенных в отличительной части формулы изобретения. Так, в предложенной машине, в отличии от прототипа осуществляется автоматическое регулирование скорости перемещения понтона с рабочим оборудованием, в соответствии с изменяющимся видом и состоянием разрабатываемого грунта.
Обеспечивается автоматическое выглубление рабочего оборудования при встрече с непреодолимым препятствием в виде камней или металлических фрагментов. Вместо скользящих направляющих кабеля установлены направляющие колеса, уменьшающие силы трения.
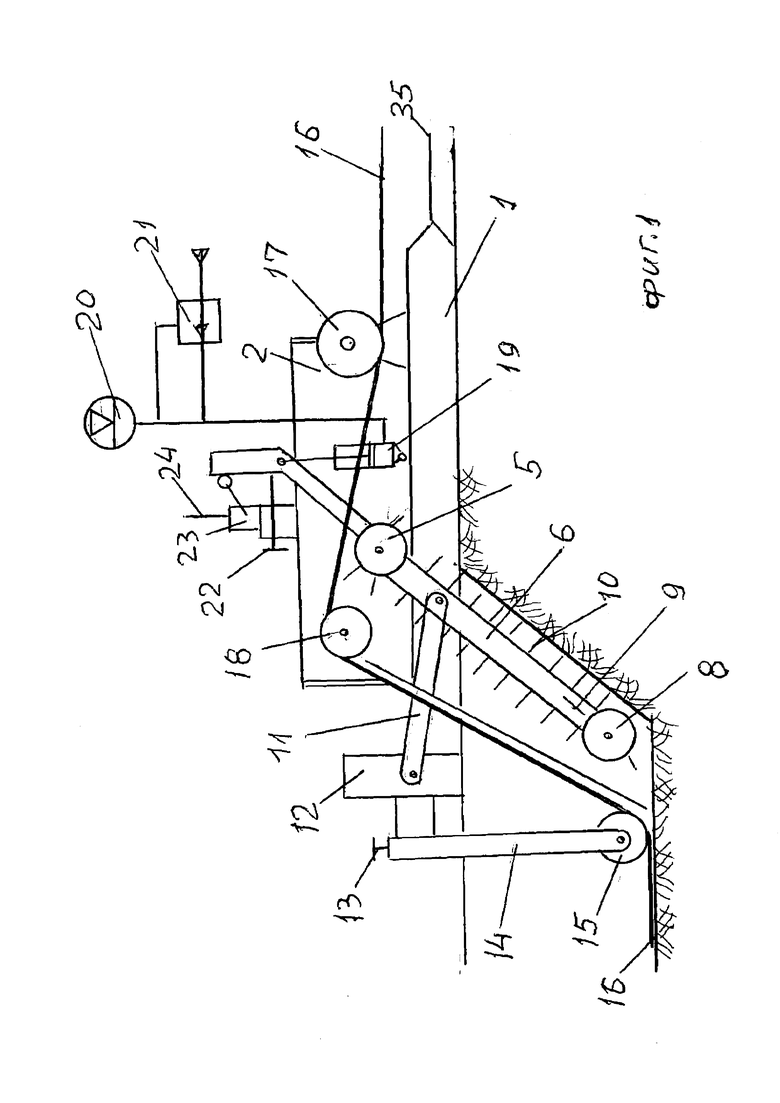
На фиг. 1 изображена баровая машина для прокладки подводного кабеля - вид сбоку; на фиг. 2 - то же, с тяговой лебедкой, вид сверху.
Баровая машина для прокладки подводного кабеля содержит понтон 1 с герметичным корпусом 2, внутри которого расположен привод рабочих органов, включающий двигатель 3 и редуктор 4. Валы редуктора имеют герметичные уплотнения в боковых стенках корпуса и на них установлены ведущие звездочки 5 цепных рабочих органов. Каждый рабочий орган включает раму 6, соединенную посредством планшайбы 7 с корпусом 2, ведущую 5 и ведомую 8 звездочки, охватываемые цепью 9 с резцами 10, установленными под углом относительно продольной оси. С рамой 6 шарнирно посредством рычагов 11 соединен угловой скребок 12, к которому подвижно с винтом 13, прикреплена стойка 14 с направляющим колесом 15 кабеля 16. Кроме того, второе направляющее колесо 17 кабеля размещено на входе, а третье направляющее колесо 18 в середине между колесами 15 и 17. Между направляющими колесам 15 и 18 расположен лоток для кабеля. Рама 6 рабочего органа соединена, посредством рычагов, шарнирно со штоком гидроцилиндра 19, поршневая полость которого, сообщена с гидроаккумулятором 20, соединенным с выходом регулируемого редукционного гидроклапана 21. Регулируемый винтовой упор 22 предназначен для регулирования и установки необходимой глубины щели. Конечный выключатель 23 электролинией управления 24 соединен с выключателями 25 и служит для автоматического отключения двигателя 3, привода рабочих органов и двигателя 26, привода гидронасоса 27, при встрече рабочего органа с непреодолимым препятствием (фиг. 2).
В зависимости от типа водоема и конкретных условий тяговая лебедка и бухты с кабелем могут быть размещены на берегу или на плавучем понтоне, закрепленном якорями. Тяговая лебедка содержит барабан 28, соединенный через редуктор 29 с регулируемым гидродвигателем 30. Орган управления гидродвигателя 30 соединен шарнирно со штоком первого гидроцилиндра управления 31, в поршневой полости которого установлен упругий элемент с механизмом 32 регулирования силы упругости. Штоковая полсть гидроцилиндра 31 сообщена гидролирией со штоковой полостью второго гидроцилиндра управления 33, на штоке которого установлен шарнирно блок 34, охватываемый тяговым канатом 35.
Баровая машина для прокладки подводного кабеля действует следующим образом.
Для подготовки баровой машины к работе заправляют кабели по направляющим колесам 17, 18 и 15. Затем регулируемым упором 22 устанавливают необходимую величину заглубления рабочих органов, опускают машину на дно водоема и включают привод рабочих органов- двигатель 3 с редуктором 4. После заглубления рабочих органов на заданную глубину включают лебедку привода понтона. При поступательном перемещении понтона 1, цепные рабочие органы резцами 10 срезают грунт, поднимают его на поверхность и, поскольку резцы расположены под углом относительно продольной оси, выгружают его по сторонам вырезаемой щели. Кабели, направляемые лотком и колесами 17, 18 и 15 укладываются на дно щели и угловыми скребками 12 засыпаются грунтом.
Регулирование скорости перемещения понтона происходит автоматически. Так, например, если встречается участок грунта, имеющего повышенную прочность, то увеличивается сопротивление перемещению цепных рабочих органов и соответственно увеличивается величина усилия в тяговом канате 35. Канат 35 воздействует через блок 34 на шток гидроцилиндра 33 и выдвигает его. Шток выдвигается и вытесняет рабочую жидкость в штоковую пполость гидроцилиндра управления 31, а его шток втягивается, сжимает упругий элемент и воздействует на орган управления гидродвигателя 30, уменьшая его скорость и соответственно скорость движения понтона 1 с рабочим оборудованием. Аналогичным образом обеспечивается увеличение скорости в случае разработки грунтов, имеющих невысокую прочность.
В том случае, если перед рабочим органом оказывается непреодолимое препятствие, например, камень или фрагмент металлической конструкции, то в результате внешнего воздействия рабочий орган выглубляется, преодолевая давление рабочей жидкости в поршневой полости гидроцилиндра 19, создаваемого гидроаккумулятором 20. Величина давления зарядки гидроаккумулятора задается с помощью регулируемого редукционного гидроклапана 21. При потере контакта рамы рабочего органа с упором 22 и конечным выключателем 23, электрический сигнал по электролинии управления 24 поступает на выключатели 25, отключающие двигатель 3 привода рабочих органов и двигатель 26 привода перемещения понтона.
Таким образом, предлагаемая баровая машина для прокладки подводного кабеля, в сравнении с прототипом, обладает возможностью автоматического регулирования скорости движения понтона с рабочим оборудованием, в зависимости от свойств разрабатываемого грунта. Это обеспечивает существенное повышение производительности. Одновременно повышается надежность баровой машины, за счет автоматического выглубления рабочих органов и отключения двигателей привода рабочих органов и привода перемещения понтона, при встрече с непреодолимым препятствием. Надежность баровой машины повышается также путем замены направляющих скольжения кабеля, направляющими колесами, что снижает силы трения и предотвращает повреждение или обрыв кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Система управления догружающего устройства скрепера | 2021 |
|
RU2761274C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНЫ | 2024 |
|
RU2834360C1 |
| КАНАЛОКОПАТЕЛЬ | 2020 |
|
RU2756995C1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| Система управления углом резания рыхлителя | 2023 |
|
RU2828248C1 |
| ВЫЕМОЧНО-ПОГРУЗОЧНАЯ МАШИНА | 2019 |
|
RU2729766C1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| Система управления отвалом бульдозера | 2021 |
|
RU2758163C1 |
| Скрепер | 2022 |
|
RU2798444C1 |

Изобретение относится к землеройным машинам, в частности к машинам для нарезания щелей и прокладке кабелей в донном грунте водоемов. Технический результат - повышение производительности и надежности. Баровая машина для прокладки подводного кабеля содержит прицепной понтон с герметичным корпусом и с размещенным внутри приводом в виде двигателя и редуктора, на выходных валах которого закреплены ведущие звездочки баровых рабочих органов, направляющие кабеля, механизм закрытия щели грунтом и тяговую лебедку. Баровая машина снабжена направляющими кабельными колесами, гидроцилиндрами опускания рабочих органов, гидроаккумуляторами, регулируемыми редукционными гидроклапанами, угловыми скребками, регулируемым гидродвигателем, гидроцилиндрами управления и конечными выключателями. Орган управления регулируемого гидродвигателя привода барабана тяговой лебедки соединен шарнирно со штоком первого гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости, а штоковая полость сообщена гидролинией со штоковой полостью второго гидроцилиндра управления, на штоке которого закреплен направляющий блок тягового каната привода понтона. Направляющие колеса кабеля установлены с возможностью свободного вращения, а механизмы закрытия щели грунтом выполнены в виде угловых скребков, шарнирно прикрепленных к рамам рабочих органов. Рамы рабочих органов посредством рычагов шарнирно соединены со штоками гидроцилиндров опускания, поршневые полости которых сообщены с гидроаккумуляторами, соединенными с выходами регулируемых редукционных гидроклапанов, причем конечные выключатели перемещения рам рабочих органов соединены электролиниями управления с выключателями двигателей привода рабочих органов и привода перемещения понтона. 1 з.п. ф-лы, 2 ил. 
1. Баровая машина для прокладки подводного кабеля, содержащая прицепной понтон с герметичным корпусом и с размещенным внутри приводом в виде двигателя и редуктора, на выходных валах которого закреплены ведущие звездочки баровых рабочих органов, направляющие кабеля, механизм закрытия щели грунтом и тяговую лебедку, отличающаяся тем, что она снабжена направляющими кабельными колесами, гидроцилиндрами опускания рабочих органов, гидроаккумуляторами, регулируемыми редукционными гидроклапанами, угловыми скребками, регулируемым гидродвигателем, гидроцилиндрами управления и конечными выключателями, при этом орган управления регулируемого гидродвигателя привода барабана тяговой лебедки соединен шарнирно со штоком первого гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости, а штоковая полость сообщена гидролинией со штоковой полостью второго гидроцилиндра управления, на штоке которого закреплен направляющий блок тягового каната привода понтона, причем направляющие колеса кабеля установлены с возможностью свободного вращения, а механизмы закрытия щели грунтом выполнены в виде угловых скребков, шарнирно прикрепленных к рамам рабочих органов, и рамы рабочих органов посредством рычагов шарнирно соединены со штоками гидроцилиндров опускания, поршневые полости которых сообщены с гидроаккумуляторами, соединенными с выходами регулируемых редукционных гидроклапанов, причем конечные выключатели перемещения рам рабочих органов соединены электролиниями управления с выключателями двигателей привода рабочих органов и привода перемещения понтона.
2. Баровая машина для прокладки подводного кабеля по п.1, отличающаяся тем, что баровые рабочие органы выполнены с расположенными на цепи резцами, установленными под углом относительно продольной оси цепи.
| Кабелепрокладочный комплекс | 1990 |
|
SU1794791A1 |
| ДРАГА ДЛЯ ПОДВОДНОЙ ДОБЫЧИ С ОБОГАЩЕНИЕМ МАГНИТОВОСПРИИМЧИВЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 0 |
|
SU390275A1 |
| Рабочий орган землеройной машины | 1977 |
|
SU726271A1 |
| ЩЕЛЕВАТЕЛЬ | 1991 |
|
RU2047696C1 |
| КАБЕЛЕПРОКЛАДОЧНЫЙ КОМПЛЕКС | 2000 |
|
RU2175617C1 |
| МАШИНА ДЛЯ НАРЕЗАНИЯ ЩЕЛЕЙ | 2005 |
|
RU2287059C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВОДНО-ТОПЛИВНОЙ ЭМУЛЬСИИ | 2004 |
|
RU2348448C2 |
