Перекрестная ссылка на родственную заявку
Данная заявка является непредварительной патентной заявкой и притязает на приоритет предварительной заявки на патент США номер 62/904715, поданной 24 сентября 2019 года и озаглавленной "In-orbit Service to the Spacecraft Through Its External Connectors", раскрытие сущности которой настоящим включено в данной документ посредством ссылки.
Область техники, к которой относится изобретение
Раскрытие сущности, в общем, относится к системам и способам использования, чтобы предоставлять обслуживание космического объекта, а более конкретно, к системам и способам использования, чтобы предоставлять орбитальное обслуживание космического аппарата через разрывные соединители космического аппарата.
Уровень техники
В ходе наземных операций и операций запуска, соединение с внутренними системами на борту космического аппарата выполняется через электрические соединительные интерфейсы на внешней поверхности космического аппарата. Например, тестирование подсистемы на земле, когда она закрывается посредством внешних защитных слоев, может осуществляться через выделенный соединитель на внешней панели, через который может проверяться состояние подсистемы, и могут запускаться протоколы тестирования. Другой пример представляет собой соединители, известные как "разрывные соединители", через которые космический аппарат тестируется, отслеживается и управляется при нахождении на средстве запуска в ходе операций запуска, и которые отделяются от своей сопряженной части на стороне средства запуска в ходе отделения космического аппарата от средства запуска.
Традиционно, космические аппараты не предназначены для обмена данных через эти внешние соединители после запуска, и вся связь после этого осуществляется через связь с земли (посредством радиочастотных (RF) передач с землей, например, в полосах C-, X-, Ku-, S-частот). Например, геостационарные спутники для передачи по среде/носителю не должны обязательно находиться в физическом контакте после отделения на орбиту от последней ступени средства запуска, и разрывные соединители не конструируются с возможностью соединяться снова при нахождении на орбите. Любой электрический интерфейс с бортовыми подсистемами согласуется посредством системы телеуправления, в том числе за счет мониторинга переменных состояния, вспомогательных операций, обновления программных пакетов и выполнения поиска и устранения неисправностей после аварий и сбоев. Такие вмешательства ограничены по своему характеру и не могут быть полезным, когда, например, непосредственно система связи выходит из строя, ломается или подвергается ухудшению рабочих характеристик, что препятствует выполнению космическим аппаратом намеченной миссии или выполнению номинальных операций. Аналогично, физический сбой, например, сбой аккумуляторного элемента, не может восстанавливаться просто посредством перепрограммирования системных межсоединений, даже не учитывая модернизацию и улучшение физических компоновочных блоков космического аппарата.
Обслуживание орбитального космического аппарата редко выполняется, и когда выполняется, оно типично представляет собой затратную и специализированную деятельность. Например, обслуживание космического телескопа Хабблa требует тщательно продуманных и одноразовых специализированных аппаратных средств и процедур. Требуются система и способ для того, чтобы обслуживать космический аппарат, которые являются надежными, относительно недорогими и применимыми к широкому спектру космических аппаратов. Раскрытие сущности разрешает эту потребность посредством предоставления системы и способа для того, чтобы обслуживать орбитальный космический аппарат через разрывной соединитель клиентского космического аппарата.
Обслуживание орбитального космического аппарата, предоставляемое посредством раскрытой системы и способа, может принимать множество форм и может быть нерегулярным или систематическим. Электрическая мощность может предоставляться в обслуживаемый космический аппарат, обновления программного обеспечения могут предоставляться, в том числе, например, могут выполняться модернизации кибербезопасности, техобслуживание системного уровня, в том числе техподдержка программного обеспечения. Орбитальное техобслуживание может выполняться, в том числе относительно умеренные орбитальные регулирования и управление ориентацией вплоть до переходов между орбитами (например, перехода из парковочной орбиты или орбиты захоронения на рабочую геостационарную орбиту). Орбитальное обслуживание может быть нерегулярным, что означает то, что выполняется специальное, относительно кратковременное обслуживание, либо может быть систематическим, что означает то, что обслуживающее устройство - космический аппарат остается состыкованным с обслуживаемым космическим аппаратом в течение длительного периода. Обслуживающее устройство - космический аппарат может предоставлять управление осевой силой и количеством движения комбинированной системы обслуживающего/клиентского космического аппарата на нерегулярной основе или на систематической основе.
Сущность изобретения
Предоставляется обслуживающая система орбитального космического аппарата для того, чтобы предоставлять орбитальное обслуживание через разрывные соединители космического аппарата. Обслуживающая система космического аппарата использует управляемую компьютером руку манипулятора, которая разворачивает и соединяет разрывной элемент обслуживающего устройства между обслуживающим космическим аппаратом и разрывным внешним соединителем клиентского космического аппарата, даже если разрывные соединители первоначально конструируются и традиционно используются только для наземных операций, типично соединяются вручную и не составляют часть любой стыковочной или захватной системы клиента. Разрывной внешний соединитель клиентского космического аппарата типично находится на относительно пустой хвостовой панели космического аппарата, которая обращена в направлении от Земли, не создавая за счет этого помехи рабочей передней панели космического аппарата, которая обращена к Земле (т.е. надиру). Электрическое соединение может использоваться для широкого спектра целей, таких как передача электрической мощности, обновления программного обеспечения, например, обновление системы безопасности, техподдержка или исправление клиентского программного обеспечения и т.д. В одном варианте осуществления, разрывной элемент обслуживающего устройства отсоединяется от клиентского космического аппарата и сворачивается в свою первоначальную позицию на обслуживающем космическом аппарате после того, как обслуживание завершается. В другом варианте осуществления, съемный обслуживающий комплект, предоставленный посредством обслуживающего устройства - космического аппарата, прикрепляется к клиентскому космическому аппарату и электрически соединяется через разрывной внешний соединитель клиентского космического аппарата.
В одном варианте осуществления, раскрывается обслуживающая система орбитального космического аппарата, при этом система содержит: обслуживающее устройство - космический аппарат, содержащий: корпус обслуживающего устройства; набор захватных рук, проходящих из корпуса обслуживающего устройства и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат; по меньшей мере один разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата; руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, выполненным с возможностью прикрепляться к и обеспечивать маневрирование второго конца разрывного элемента обслуживающего устройства; и процессор, функционирующий с возможностью управлять рукой манипулятора; при этом: рука манипулятора обеспечивает маневрирование второго конца разрывного элемента обслуживающего устройства, чтобы формировать соединение между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем.
В одном аспекте, соединение представляет собой электрическое соединение. В другом аспекте, обслуживающее устройство - космический аппарат дополнительно содержит вспомогательный источник мощности. В другом аспекте, электрическая мощность, предоставляемая посредством вспомогательного источника мощности, передается из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через электрическое соединение. В другом аспекте, обслуживающее устройство дополнительно содержит обслуживающий комплект, съемный с корпуса обслуживающего устройства и выполненный с возможностью прикрепляться к клиентскому орбитальному космическому аппарату. В другом аспекте, обслуживающий комплект предоставляет электрическую мощность в клиентский орбитальный космический аппарат через соединение. В другом аспекте, набор захватных рук зацепляет интерфейсное кольцо клиентского орбитального космического аппарата в выбираемой позиции тактирования интерфейсного кольца. В другом аспекте, соединение, сформированное между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем, остается прочным после того, как рука манипулятора отсоединяется от концевого соединителя разрывного элемента обслуживающего устройства. В другом аспекте, разрывной элемент обслуживающего устройства содержит набор электрических кабелей, выполненных с возможностью передавать по меньшей мере одно из электрической мощности и электрических сигналов в клиентский орбитальный космический аппарат. В другом аспекте, концевой соединитель разрывного элемента обслуживающего устройства соединяется по меньшей мере с одним датчиком, причем упомянутый по меньшей мере один датчик предоставляет данные датчиков в процессор, чтобы помогать концевому соединителю разрывного элемента обслуживающего устройства формировать соединение с клиентским разрывным соединителем. В другом аспекте, по меньшей мере один датчик представляет собой микрокамеру. В другом аспекте, концевой соединитель разрывного элемента обслуживающего устройства дополнительно соединяется с удлиняющей направляющей, причем удлиняющая направляющая формирует конусообразное удлинение из концевого соединителя разрывного элемента обслуживающего устройства, чтобы упрощать совмещение концевого соединителя разрывного элемента обслуживающего устройства с осью Z клиентского разрывного соединителя.
В другом варианте осуществления, раскрывается обслуживающая система орбитального космического аппарата, при этом система содержит: обслуживающее устройство - космический аппарат, содержащий: корпус обслуживающего устройства; набор из двух или более захватных рук, проходящих из корпуса обслуживающего устройства и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат; по меньшей мере один разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата; руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, сопряженным с датчиком и выполненным с возможностью обеспечивать маневрирование второго конца разрывного элемента обслуживающего устройства; вспомогательный источник мощности; и процессор, функционирующий с возможностью управлять рукой манипулятора; при этом: датчик предоставляет данные датчиков в процессор, чтобы помогать концевому соединителю разрывного элемента обслуживающего устройства формировать соединение с клиентским разрывным соединителем; разрывной элемент обслуживающего устройства содержит набор электрических кабелей, выполненных с возможностью передавать электрические сигналы мощности и электрические сигналы в клиентский орбитальный космический аппарат; вспомогательный источник мощности предоставляет электрическую мощность из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через разрывной элемент обслуживающего устройства; и рука манипулятора обеспечивает маневрирование второго конца разрывного элемента обслуживающего устройства, чтобы формировать соединение между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем.
В еще одном другом варианте осуществления, раскрывается способ обслуживания орбитального космического аппарата, при этом способ содержит: предоставление обслуживающего устройства - космического аппарата, содержащего: корпус обслуживающего устройства; набор захватных рук, проходящих из корпуса обслуживающего устройства и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат; по меньшей мере один разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата; руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, выполненным с возможностью обеспечивать маневрирование второго конца разрывного элемента обслуживающего устройства; и процессор, функционирующий с возможностью управлять рукой манипулятора; соединение обслуживающего устройства - космического аппарата и клиентского орбитального космического аппарата с использованием набора захватных рук; управление рукой манипулятора таким образом, чтобы позиционировать второй конец разрывного элемента обслуживающего устройства в позицию рядом с клиентским разрывным соединителем; и подключение концевого соединителя разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю; при этом: электрическое соединение формируется между обслуживающим космическим аппаратом и клиентским орбитальным космическим аппаратом.
В одном аспекте, способ дополнительно содержит этап передачи электрической мощности из вспомогательного силового модуля обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через электрическое соединение. В другом аспекте, способ дополнительно содержит этап передачи электрических сигналов из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через электрическое соединение. В другом аспекте, способ дополнительно содержит этап вращения концевого соединителя разрывного элемента обслуживающего устройства в выбранную позицию тактирования клиентского разрывного соединителя. В другом аспекте, способ дополнительно содержит этап обработки набора сигналов из датчика, смонтированного на втором конце разрывного элемента обслуживающего устройства, причем набор сигналов обеспечивает точное позиционирование второго конца разрывного элемента обслуживающего устройства в позицию рядом с клиентским разрывным соединителем. В другом аспекте, набор захватных рук зацепляет интерфейсное кольцо клиентского орбитального космического аппарата. В другом аспекте, набор захватных рук выполнен с возможностью вращать клиентский орбитальный спутник вокруг оси Z клиентского орбитального спутника, и рука манипулятора функционирует с тремя степенями свободы.
Фразы "по меньшей мере один", "один или более" и "и/или" представляют собой многовариантные выражения, которые являются как конъюнктивными, так и дизъюнктивными при использовании. Например, каждое из выражений "по меньшей мере одно из A, B и C", "по меньшей мере одно из A, B или C", "одно или более из A, B и C", "одно или более из A, B или C" и "A, B и/или C" означает только A, только B, только C, A и B вместе, A и C вместе, B и C вместе или A, B и C вместе.
Формы единственного числа для объекта означают один или более таких объектов. В связи с этим, данные формы единственного числа, а также выражения "один или более" и "по меньшей мере один" могут использоваться взаимозаменяемо в данном документе. Также следует отметить, что выражения "содержащий", "включающий в себя" и "имеющий" могут использоваться взаимозаменяемо.
Термин "автоматический" и его варьирования, при использовании в данном документе, означают любой процесс или операцию, осуществляемый без материального человеческого ввода, когда процесс или операция выполняется. Тем не менее, процесс или операция может быть автоматическим, даже если выполнение процесса или операции использует материальный или нематериальный человеческий ввод, если ввод принимается перед выполнением процесса или операции. Человеческий ввод считается материальным, если такой ввод оказывает влияние на то, как выполняется процесс или операция. Человеческий ввод, который соглашается на выполнение процесса или операции, не считается "материальным".
Термины "определять", "вычислять" и "рассчитывать" и их варьирования, при использовании в данном документе, используются взаимозаменяемо и включают в себя любой тип методологии, процесса, математической операции или технологии.
Фраза "клиентский космический аппарат" означает космический аппарат, функционирующий на орбите, который должен обслуживаться, например, клиентский спутник, в том числе клиентский спутник связи.
Фраза "обслуживающее устройство - космический аппарат" означает космический аппарат, который функционирует на орбите, чтобы выполнять орбитальное обслуживание для клиентского космического аппарата.
Фраза "разрывной соединитель" и "клиентский разрывной соединитель" означает соединитель клиентского космического аппарата, который традиционно используется только на земле в качестве электрического соединения с клиентским космическим аппаратом и не предназначен для использования на орбите, по сравнению с "обслуживающим соединителем", который намеренно предназначен для использования на орбите для обслуживания.
Фраза "разрывной элемент обслуживающего устройства" означает электрический соединитель, такой как кабель, который соединяется между обслуживающим космическим аппаратом и клиентским разрывным соединителем и может быть аналогичным, если не идентичным разрывному элементу, используемому на земле для того, чтобы соединяться с клиентским разрывным соединителем. Разрывной элемент обслуживающего устройства может соединяться непосредственно с обслуживающим космическим аппаратом или может соединяться посредством электрического шнура, жгута проводов и т.д. Термин "средство" при использовании в данном документе должен использоваться в своей самой широкой интерпретации в соответствии с пунктом 35 Кодекса США, раздел 112, параграф 6. Соответственно, пункт формулы изобретения, включающий термин "средство", должен охватывать все структуры, материалы или этапы, изложенные в данном документе, и все их эквиваленты. Дополнительно, структуры, материалы или этапы и их эквиваленты должны включать в себя все структуры, материалы или этапы и их эквиваленты, описанные в сущности изобретения, в кратком описании чертежей, в подробном описании, в реферате и в формуле изобретения.
Различные варианты осуществления или части способов изготовления также или альтернативно могут реализовываться частично в программном обеспечении и/или микропрограммном обеспечении, например, в анализе признаков. Это программное обеспечение и/или микропрограммное обеспечение может принимать форму инструкций, содержащихся в/на энергонезависимом машиночитаемом носителе хранения данных. Эти инструкции затем могут считываться и выполняться посредством одного или более процессоров, чтобы обеспечивать возможность выполнения операций, описанных в данном документе. Инструкции могут иметь любую подходящую форму, например, но не только, исходного кода, компилируемого кода, интерпретируемого кода, исполняемого кода, статического кода, динамического кода, микропрограммного кода и т.п. Такой машиночитаемый носитель может включать в себя любой материальный энергонезависимый носитель для сохранения информации в форме, считываемой посредством одного или более компьютеров, например, но не только, как постоянное запоминающее устройство (ROM); оперативное запоминающее устройство (RAM); носители хранения данных на магнитных дисках; оптические носители хранения данных; флэш-память и т.д.
Выше приведено упрощенное раскрытие сущности, чтобы предоставлять понимание некоторых аспектов раскрытия сущности. Эта сущность не представляет собой ни обширное, ни исчерпывающее представление раскрытия сущности и его различных аспектов, вариантов осуществления и/или конфигураций. Она не имеет намерение ни идентифицировать ключевые или критически важные элементы раскрытия сущности, ни разграничивать объем раскрытия сущности, а служит для того, чтобы представлять выбранные понятия раскрытия сущности в упрощенной форме в качестве введения в более подробное описание, представленное ниже. Следует принимать во внимание, что другие аспекты, варианты осуществления и/или конфигурации раскрытия сущности являются возможными с использованием, отдельно или в комбинации, одного или более признаков, изложенных выше или подробно описанных ниже. Кроме того, хотя раскрытие сущности представляется с точки зрения примерных вариантов осуществления, следует принимать во внимание, что отдельные аспекты раскрытия сущности могут отдельно заявляться в формуле изобретения.
Краткое описание чертежей
Раскрытие сущности должно легко пониматься за счет нижеприведенного подробного описания в сочетании с прилагаемыми чертежами, на которых аналогичные ссылки с номерами обозначают аналогичные элементы. Элементы чертежей необязательно должны быть нарисованы в масштабе относительно друг друга. Идентичные ссылки с номерами использованы, по возможности, для того, чтобы обозначать идентичные признаки, которые являются общими для чертежей.
Фиг.1A является представлением в форме вида в перспективе одного варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом;
Фиг.1B является подробным видом в перспективе варианта осуществления обслуживающей системы орбитального космического аппарата по фиг.1A;
Фиг.2 является представлением в форме вида в перспективе другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом;
Фиг.3 является представлением в форме блок-схемы другого варианта осуществления обслуживающей системы орбитального космического аппарата;
Фиг.4A является частью один из двух частей блок-схемы последовательности операций способа использования варианта осуществления обслуживающей системы орбитального космического аппарата по фиг.3;
Фиг.4B является частью два из двух частей блок-схемы последовательности операций способа использования варианта осуществления обслуживающей системы орбитального космического аппарата по фиг.3;
Фиг.5 является представлением в форме вида в перспективе другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом, причем обслуживающее устройство - космический аппарат имеет две руки манипулятора, каждая из которых имеет интегрированный разрывной элемент обслуживающего устройства;
Фиг.6A является подробным видом сверху другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом (захватные руки не показаны для понятности), руку манипулятора в первом состоянии руки манипулятора и разрывной элемент обслуживающего устройства в первом состоянии разрывного элемента обслуживающего устройства;
Фиг.6B является подробным видом сверху другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом (захватные руки не показаны для понятности), руку манипулятора во втором состоянии руки манипулятора и разрывной элемент обслуживающего устройства во втором состоянии разрывного элемента обслуживающего устройства;
Фиг.6C является подробным видом сверху другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом (захватные руки не показаны для понятности), руку манипулятора в третьем состоянии руки манипулятора и разрывной элемент обслуживающего устройства в третьем состоянии разрывного элемента обслуживающего устройства;
Фиг.6D является подробным видом сверху другого варианта осуществления обслуживающей системы орбитального космического аппарата раскрытия сущности, при этом вариант осуществления показывает обслуживающее устройство - космический аппарат, состыкованный с клиентским космическим аппаратом (захватные руки не показаны для понятности), руку манипулятора в четвертом состоянии руки манипулятора и разрывной элемент обслуживающего устройства в четвертом состоянии разрывного элемента обслуживающего устройства;
Фиг.7 является блок-схемой последовательности операций способа использования при работе руки манипулятора и конца разрывного элемента обслуживающего устройства в ходе операций подключения, обслуживания и отключения;
Фиг.8 является подробным видом в перспективе концевого соединителя клиентского космического аппарата по мере того, как присоединенные концы руки манипулятора обслуживающего устройства - космического аппарата и разрывного элемента обслуживающего устройства обслуживающего устройства - космического аппарата приближаются, чтобы формировать соединение в ходе точных операций управления; и
Фиг.9 является блок-схемой последовательности операций способа использования при работе руки манипулятора и конца разрывного элемента обслуживающего устройства в ходе точных операций управления около клиентского разрывного соединителя.
Подробное описание изобретения
Далее приводятся подробности касательно характерных вариантов осуществления. Нижеприведенные описания не имеют намерение ограничивать варианты осуществления одним предпочтительным вариантом осуществления. Наоборот, они имеют намерение охватывать альтернативы, модификации и эквиваленты, которые могут включаться в рамки сущности и объема описанных вариантов осуществления, заданные, например, посредством прилагаемой формулы изобретения.
Обычно, обслуживающая система орбитального космического аппарата функционирует с возможностью предоставлять орбитальное обслуживание через доступные разрывные соединители космического аппарата. После состыковки, обслуживающая система космического аппарата использует руку манипулятора, которая соединяет разрывной элемент обслуживающего устройства между обслуживающим космическим аппаратом и разрывным соединителем клиентского космического аппарата. Разрывной соединитель традиционно используется только для наземных операций, таких как операции контроля и операции перед запуском системы. После установления, электрическое соединение, сформированное посредством разрывного элемента обслуживающего устройства, может использоваться для любого числа целей, в том числе, без ограничения, для передачи электрической мощности, обновлений программного обеспечения, например, для обновлений системы безопасности, для добавления усовершенствованных мер предотвращения проникновений или обеспечения кибербезопасности, для добавления избыточности для клиента, например, посредством предоставления подсистемы избыточной телеметрии, отслеживания и управления (TT и C), для техподдержки или исправления клиентского программного обеспечения и т.д. В одном варианте осуществления, разрывной элемент обслуживающего устройства отсоединяется от клиентского космического аппарата и сворачивается в свою первоначальную позицию на обслуживающем космическом аппарате после того, как обслуживание завершается. В другом варианте осуществления, разрывной элемент обслуживающего устройства остается соединенным с клиентским космическим аппаратом после того, как обслуживание завершается. В другом варианте осуществления, обслуживающий комплект прикрепляется к разрывному соединителю клиентского космического аппарата и остается с клиентским космическим аппаратом после того, как обслуживающее устройство - космический аппарат расстыкуется от клиентского космического аппарата. Обслуживающий комплект может предоставлять, без ограничения, автономный источник мощности, избыточную подсистему, например, для командования и управления и т.д.
В дальнейшем описываются раскрытые устройства, системы и способы использования со ссылкой на фиг.1-9.
Фиг.1-3 и 5 предоставляют представления всей обслуживающей системы орбитального космического аппарата (также называемой "обслуживающей системой космического аппарата", "системой системы клиентского космического аппарата", "обслуживающей системой" или просто "системой"). Фиг.6 и 8 предоставляют представления частей обслуживающей системы орбитального космического аппарата. Фиг.4A-B предоставляют последовательность операций или способ использования общей миссии обслуживающей системы орбитального космического аппарата (также называемый "способом работы обслуживающей системы космического аппарата", "способом работы обслуживающей системы клиентского космического аппарата", "способом работы обслуживающей системы" или просто "способом"). Фиг.7 и 9 предоставляют последовательность операций или способ использования частей способа использования по фиг.4A-B подробнее, чем предоставляется на фиг.4A-B.
Обращаясь к фиг.1A-B, проиллюстрированы виды в перспективе одного варианта осуществления обслуживающей системы 100 орбитального космического аппарата. Обслуживающая система 100 орбитального космического аппарата показывается с обслуживающим космическим аппаратом 110 (также называемым "обслуживающим устройством 110"), зацепленным или состыкованным с клиентским космическим аппаратом 10 (также называемым "клиентом 10").
Термин "зацепляться" и фраза "зацепленный с" означает соединение или соединяться, в том числе, например, состыковку. Термин "состыковываться" и фраза "состыковка с" означают присоединение друг к другу двух отдельных космических объекта в свободном полете, типично включающее в себя защелкивание или иное соединение двух объектов посредством стыковочного соединителя. "Мягкая состыковка" представляет собой состыковку, которая не формирует жесткое соединение между космическими объектами; "жесткая состыковка" формирует жесткое соединение между космическими объектами.
Обслуживающее устройство - космический аппарат 110 формирует жесткое стыковочное соединение с клиентом 10 посредством набора захватных рук 130, причем захватные руки 130 зацепляют интерфейсное кольцо 30. Интерфейсное кольцо 30 обычно имеет стандартизированную конфигурацию, например, с известным диаметром и известной геометрии краев, чтобы упрощать операции пристыковки. В других вариантах осуществления, захватные руки 130 зацепляются с любым доступным конструктивно стабильным компонентом или областью корпуса 20 клиента.
В конфигурации, показанной на фиг.1A-B, интерфейсное кольцо 30 центрируется вокруг оси 21 Z клиента корпуса 20 клиента, и зацепленный или состыкованный клиент 10 и обслуживающее устройство 110 совмещаются относительно общей оси 21, 121 Z. Иначе говоря, ось 121 Z обслуживающего устройства является практически коаксиальной или практически общей с осью 21 Z клиента. Фраза "практически коаксиальный" и "практически общий" означает выбираемый и заданный допуск или отклонение. Состыковка обслуживающего устройства 110 с клиентом 10 через набор захватных рук 130 может упрощаться посредством геометрий или конфигураций захватных рук 130, например, концов захватных рук 130, как описано в патенте США номер 10611504, авторов Halsband и др., полностью содержащемся по ссылке для всех целей.
Система координат обслуживающей системы 100 орбитального космического аппарата, иллюстрирующая общую ось 121 Z обслуживающего устройства и ось 21 Z клиента, предоставляется в качестве системы 101 координат. Ось Z указывает на Землю (надир). В связи с этим, обслуживающее устройство 110 функционирует на немного более высокой орбите, чем клиент 10.
Клиентский космический аппарат 10 содержит корпус 20 клиента, по меньшей мере один клиентский разрывной соединитель 40, расположенный на или соединенный с поверхностью корпуса 20 клиента, и интерфейсное кольцо 30. Обслуживающее устройство - космический аппарат 110 содержит корпус 120 обслуживающего устройства, набор захватных рук 130 и интегрированную или комбинированную руку 140 манипулятора и разрывной элемент обслуживающего устройства 150. (В других вариантах осуществления, например, как описано на фиг.6A-D, рука 140 манипулятора и разрывной элемент обслуживающего устройства 150 представляют собой отдельные элементы). В некоторых вариантах осуществления, клиентский космический аппарат 10 содержит более одного клиентского разрывного соединителя 40, и/или обслуживающее устройство - космический аппарат 110 содержит более одной руки манипулятора 40.
Набор захватных рук 130 проходит из корпуса 120 обслуживающего устройства обслуживающего устройства 110 с тем, чтобы зацеплять интерфейсное кольцо 30 (и/или другую конструктивно стабильную часть корпуса 20 клиента) и формировать жесткую или жестко состыкованную пару космического аппарата. В конфигурации по фиг.1, обслуживающее устройство 100 содержит две захватных руки 130. Другие конфигурации захватных рук включают в себя, например, три или четыре (см. фиг.2) захватные руки 130.
Как вкратце упомянуто выше, в некоторых вариантах осуществления, набор захватных рук 130 зацепляется не с интерфейсным кольцом клиента 10, например, посредством одного или более удлинений либо выступов корпуса 20 клиента, одного или более краев корпуса 20 клиента и других средств, известных специалистам в данной области техники. В одном варианте осуществления, обслуживающее устройство 110 и клиент 10 состыкуются посредством пластинчатого корпуса, как описано в патентной заявке США номер 2018/0229865, авторов Maeda и др., полностью включенной посредством ссылки для всех целей. В одном варианте осуществления, набор захватных рук зацепляется с существующими или усовершенствовавшими стандартизированными стыковочными компонентами, в том числе с экономной стыковочной системой (LID) NASA и/или со стыковочными компонентами, адаптированными из существующих компонентов, такими как механизм мягкого захвата (SCM) космического телескопа Хабблa.
После состыковки, интегрированная или комбинированная рука 140 манипулятора и разрывной элемент обслуживающего устройства 150 маневрируют, чтобы зацепляться или подключаться к разрывному соединителю 40. Разрывной соединитель 40 имеет ось 41 Z разрывного соединителя, которая является параллельной с каждой из оси 121 Z обслуживающего устройства и оси 21 Z клиента. Чтобы пытаться зацепляться или подключаться к разрывному соединителю 40, разрывной элемент обслуживающего устройства 150 должен, как минимум, практически совмещаться на оси Z с разрывным соединителем 40 и фактически позиционироваться в плоскости X-Y непосредственно перед или рядом с позицией по оси X-Y поверхности разрывного соединителя. В некоторых вариантах осуществления разрывного соединителя 40, конкретная ориентация вращения разрывного элемента обслуживающего устройства 150 также требуется (так называемая "ориентация тактирования"). Дополнительные сведения относительно позиционирования и/или вращательные совмещения разрывного элемента обслуживающего устройства 150 относительно поверхности разрывного соединителя 40 предоставляются ниже относительно фиг.8 и 9.
После того, как соединение или положительное подключение осуществляется между разрывным соединителем 40 и обслуживающим разрывным элементом 150, электрическая связь может выполняться между обслуживающим устройством 110 и клиентом 10 посредством разрывного элемента обслуживающего устройства 150.
Фиг.5 является представлением в форме вида в перспективе другого варианта осуществления обслуживающей системы 500 орбитального космического аппарата, причем вариант осуществления является почти идентичным обслуживающей системе 100 космического аппарата по фиг.1A-B, за исключением того, что обслуживающее устройство - космический аппарат 510 имеет две руки 144, 144' манипулятора, и некоторые подробности клиентского космического аппарата 10 исключены для прозрачности (например, форсунка ракетного двигателя).
Обслуживающая система 500 орбитального космического аппарата показывается с обслуживающим космическим аппаратом 510, зацепленным или состыкованным с клиентским космическим аппаратом 10. Клиентский космический аппарат 10 имеет корпус 20 клиента, интерфейсное кольцо 30 и клиентский разрывной соединитель 40.
Как проиллюстрировано на фиг.5, обслуживающее устройство - космический аппарат 510 имеет корпус 520 обслуживающего устройства, набор из двух захватных рук 130 и набор из двух рук 140, 140' манипулятора. Набор захватных рук 130 зацепляется или соединяется с интерфейсным кольцом 30, чтобы предоставлять жесткую состыковку клиента 10 и обслуживающего устройства 110. Каждая из этих двух рук 140, 140' манипулятора содержит интегрированный разрывной элемент обслуживающего устройства (смысл, что каждая из рук 140 и 140' манипулятора содержит разрывной элемент обслуживающего устройства 150). Рука 140' манипулятора проиллюстрирована в убранном состоянии или убранной конфигурации в позиции приблизительно на 180 градусов вращения относительно руки 140 манипулятора. Рука 140 манипулятора имеет первый конец 143 руки манипулятора и второй конец 144 руки манипулятора. Первый конец 143 руки манипулятора прикрепляется или соединяется с корпусом 520 космического аппарата услуги 510. Второй конец 144 руки манипулятора выполнен с возможностью представлять конец разрывного элемента обслуживающего устройства, чтобы обеспечивать возможность электрического соединения с клиентским разрывным соединителем 40 (который подробно поясняется ниже, например, см. фиг.8). Каждая рука 140, 140' манипулятора содержит первый конец, прикрепленный к корпусу 520 обслуживающего устройства, и второй конец, выполненный с возможностью прикрепляться к и обеспечивать маневрирование разрывного элемента обслуживающего устройства в позицию рядом с клиентским разрывным соединителем 40 и подключать разрывной элемент обслуживающего устройства к клиентскому разрывному соединителю 40. Каждая рука 140, 140' манипулятора прикрепляется к любому доступному конструктивно прочному местоположению на корпусе 520 обслуживающего устройства.
Фиг.2 предоставляет представление в форме вида в перспективе другого варианта осуществления обслуживающей системы 200 орбитального космического аппарата. Обслуживающая система 200 космического аппарата по фиг.2 является аналогичной обслуживающей системе 100 космического аппарата по фиг.1 и адаптируется из патента США номер 10625882, авторов Reitman и др., включенного посредством ссылки для всех целей.
Обращаясь к фиг.2, проиллюстрирован вид в перспективе обслуживающего устройства - космического аппарата 210, зацепленного или состыкованного с клиентским космическим аппаратом 10. Два космических аппарата состыковываются таким образом, что общая ось Z совместно используется, как проиллюстрировано со ссылкой на систему 201 координат.
Клиентский космический аппарат 10 содержит корпус 20 клиента, пару солнечных панелей, клиентский разрывной соединитель 40 и интерфейсное кольцо 30. Каждое из клиентского разрывного соединителя 40 и интерфейсного кольца 30 располагается на поверхности корпуса 20, обращенной к обслуживающему космическому аппарату 210. Клиентский разрывной соединитель 40 располагается приблизительно в позиции вращения на -45 градусов относительно оси Y системы 201 координат. Следует отметить, что другие позиции клиентского разрывного соединителя являются возможными, в том числе, без ограничения, позиции вращения на 90, 180 и 270 (относительно оси Z) относительно проиллюстрированного клиентского разрывного соединителя 40 и на любой промежуточный угол. Кроме того, клиент 10 может содержать более одного разрывного соединителя 40 (как показано, например, на фиг.5) ·
Обслуживающее устройство - космический аппарат 210 содержит корпус 220, пару солнечных панелей, набор из четырех захватных рук 230 и набор из четырех осевых тяговых рук 235, каждая из которых имеет соответствующие осевое тяговое устройство 236. Осевые тяговые руки 235 с соответствующими осевыми тяговыми устройствами 236 предоставляют, в числе прочего, управление осевой силой и количеством движения комбинированной системы обслуживающего/клиентского космического аппарата.
Фиг.3 является представлением в форме блок-схемы другого варианта осуществления обслуживающей системы 300 орбитального космического аппарата, причем обслуживающая система 300 космического аппарата является аналогичной соответствующим обслуживающим системам 100, 200, 500 космического аппарата по фиг.1A-B, 2 и 5 с добавлением нескольких компонентов или элементов. Клиентский космический аппарат 10 содержит корпус 20 клиента, интерфейсное кольцо 30 и клиентский разрывной соединитель 40.
Обслуживающее устройство - космический аппарат 310 содержит корпус 320, набор захватных рук 130, руку 140 манипулятора и разрывной элемент обслуживающего устройства 150. Кроме того, обслуживающее устройство - космический аппарат 310 содержит корпус 320 обслуживающего устройства, захватные руки 130, руку 140 манипулятора, разрывной элемент обслуживающего устройства 150, процессор 360, вспомогательный источник 380 мощности и съемный обслуживающий комплект 370.
Процессор 320 предоставляет управление и управление компонентами обслуживающего устройства - космического аппарата 310, которые предоставляют обслуживание клиентского космического аппарата 10 посредством разрывного элемента обслуживающего устройства 150. В частности, процессор 320 управляет или осуществляет операции с рукой 140 манипулятора при маневрировании разрывного элемента обслуживающего устройства 150, чтобы зацепляться или подключаться к клиентскому разрывному соединителю 40 таким образом, что электросвязь (например, передача мощности, передача сигналов и т.д.) может предоставляться между обслуживающим устройством 310 и клиентом 10. Фиг.4A-B предоставляют подробную информацию такого осуществления операций и управления рукой 140 манипулятора и обслуживающим разрывным элементом 150. Процессор 360 управляет набором захватных рук 130. В некоторых вариантах осуществления, операция захватных рук 130 управляется частично или полностью посредством другого процессора обслуживающего устройства - космического аппарата (не показан). В одном варианте осуществления, процессор 320 не управляет захватными руками 130. В одном варианте осуществления, процессор 320 управляет рукой 140 манипулятора, съемным обслуживающим комплектом 370, вспомогательным источником 380 мощности и/или обслуживающим разрывным элементом 150. Процессор 320 может работать в любом числе режимов управления для одного или более компонентов. Например, процессор 320 может осуществлять операции с рукой 140 манипулятора в первом режиме позиционирования, который позиционирует прикрепленный разрывной элемент обслуживающего устройства 150 в место рядом с клиентским разрывным соединителем 40, и во втором режиме точного позиционирования, который выполняет маневры для подключения или отключения разрывного элемента обслуживающего устройства 150 относительно клиентского разрывного соединителя 40 (см., например, фиг.8-9 для получения дополнительных сведений).
Обслуживающее устройство - космический аппарат 310 также включает в себя вспомогательный источник 380 мощности, который может использоваться для того, чтобы подавать электрическую мощность в клиент 10 посредством разрывного элемента обслуживающего устройства 150, когда разрывной элемент обслуживающего устройства 150 соединяется или подключается к клиентскому разрывному соединителю 40. Альтернативно или дополнительно, главный источник мощности или первичный источник мощности (не показан) обслуживающего устройства - космического аппарата 310 может использоваться для того, чтобы подавать мощность в клиент через разрывной элемент обслуживающего устройства 150. Такой главный источник мощности и вспомогательный источник 380 мощности могут работать координированно посредством процессора 360. Например, главный источник мощности обслуживающего устройства - космического аппарата может предоставлять мощность в клиент 10 только тогда, когда главный источник мощности не используется или не выдает мощность, чтобы осуществлять операции с обслуживающими устройствами, такими как (электрические) осевые тяговые устройства 236, при этом процессор 380 в ином случае предоставляет мощность в клиент 10 с использованием вспомогательного источника 380 мощности. Кроме того, один или оба из главного источника мощности и вспомогательного источника мощности, под управлением процессора 320, могут извлекать электрическую мощность от клиента в дополнение к доставке электрической мощности в клиент.
Съемный обслуживающий комплект 370 прикрепляется к или закрепляется на клиентском космическом аппарате 10, чтобы предоставлять обслуживание для клиента 10 после расстыковки обслуживающего устройства - космического аппарата 310. Съемный обслуживающий комплект 370 может предоставлять любое число функций, в том числе электрическую мощность, избыточные функции (например, подсистемы резервного командования и управления, резервной связи, дополнительной или избыточной телеметрии, отслеживания и управления), признаки модернизации (например, признаки обеспечения повышенной безопасности, например, признаки обеспечения кибербезопасности или защиты) и т.п. Съемный обслуживающий комплект 370 может конструироваться с возможностью предоставлять или выполнять конкретные для клиента функции, например, выполнять протокол поиска и устранения неисправностей для ошибочного аппаратного или программного модуля. Съемный обслуживающий комплект 370 может оставаться прикрепленным и/или электрически соединенным с клиентом 10 после того, как обслуживающее устройство 310 расстыкуется от клиента 10. Съемный обслуживающий комплект 370 позиционируется с возможностью зацепляться и в некоторых вариантах осуществления прикрепляться к клиенту 10 посредством руки 140 манипулятора.
В одном варианте осуществления, съемный обслуживающий комплект 370 электрически соединяется с обслуживающим устройством на первом конце обслуживающего комплекта 370 и электрически соединяется с клиентом 10 на втором конце обслуживающего комплекта 370 через клиентский разрывной соединитель 40. В некоторых вариантах осуществления, один или более обслуживающих разрывных элементов 150 прикрепляются или соединяются с обслуживающим комплектом 370 на одном или обоих из первого конца обслуживающего комплекта 370 и второго конца обслуживающего комплекта 370. В одном варианте осуществления, обслуживающий комплект 370 непосредственно соединяется с клиентским разрывным соединителем 40. В одном варианте осуществления, обслуживающий комплект 370 соединяется с клиентским разрывным соединителем 40 без использования или соединения с обслуживающим разрывным элементом 150. Работа съемного обслуживающего комплекта 370 подробнее описывается относительно фиг 4A-B.
Фиг.4A-B предоставляют блок-схему последовательности операций одного способа 400 использования варианта осуществления обслуживающей системы 300 орбитального космического аппарата по фиг.3. Тем не менее, аспекты и признаки любых из фиг.1, 2 и 4-9 могут упоминаться, чтобы улучшать раскрытие сущности способа использования. Например, элементы, описанные на фиг.6A-D, упоминаются в ходе описания нескольких этапов способа 400. Обычно, способ 400 начинается на этапе 404 и завершается на этапе 460. Любые из этапов, функций и операций, поясненных в данном документе, могут выполняться непрерывно и автоматически. В некоторых вариантах осуществления, один или более этапов способа использования 400, в том числе этапы способа 400, могут содержать компьютерное управление, использование компьютерных процессоров и/или некоторый уровень автоматизации. Фактически, большая часть, если не все этапы способа 400 выполняются автоматически, главным образом, если не полностью посредством процессора 320. Тем не менее, в некоторых вариантах осуществления, некоторые этапы или части некоторых этапов выполняются совместно с или исключительно посредством вмешательства человека. Например, после того как электрическое соединение устанавливается между обслуживающим космическим аппаратом 310 и клиентским космическим аппаратом 10 на этапе 440, человек-оператор может вмешиваться, чтобы направлять конкретное программное обеспечение таким образом, что оно выгружается в клиентский космический аппарат 10, как пояснено ниже.
Этапы отвлеченно выполняются в возрастающей числовой последовательности, хотя, в некоторых вариантах осуществления, некоторые этапы могут опускаться, некоторые этапы могут добавляться, и этапы могут выполняться не в возрастающем числовом порядке. Пользователь может взаимодействовать либо выполнять один или более описанных этапов посредством использования дисплея/GUI. Фраза "пользовательский интерфейс" или "UI" и фраза "графический пользовательский интерфейс" или "GUI" означает компьютерный дисплей, который обеспечивает возможность взаимодействия с пользователем с помощью изображений или графики.
После начала на этапе 404, способ 400 переходит к этапу 408. На этапе 408, обслуживающее устройство - космический аппарат 310 позиционируется таким образом, чтобы зацепляться или состыковаться с клиентским космическим аппаратом 10. Клиентский космический аппарат может находиться на любой из определенного числа типов орбиты, в том числе на геостационарной околоземной орбите (GEO), низкой околоземной орбите (LEO), средней околоземной орбите (MEO), межпланетных переходных орбитах, в лагранжевых точках Земля-Луна и в любой стабильной орбитальной конфигурации. В одном варианте осуществления, клиентский космический аппарат представляет собой клиентский спутник, например, спутник связи. В одном варианте осуществления, клиентский спутник функционирует на одной из GEO или LEO. Клиентский космический аппарат может работать в стабильной конфигурации или в неуправляемой конфигурации. В любой клиентской конфигурации, на этапе 408, обслуживающее устройство - космический аппарат 310 позиционируется таким образом, что он обращен к клиентскому космическому аппарату 10 без относительного движения между двумя космическими аппаратами, за счет этого обеспечивая состыковку двух космических аппаратов. Иначе говоря, на этапе 408, обслуживающее устройство 310 позиционируется таким образом, что захватные руки 130 обращены к интерфейсному кольцу 30 и клиентскому разрывному соединителю 40 клиента 10, так что захватные руки 130 могут выдвигаться с возможностью состыковываться с клиентом 10. В одном варианте осуществления, клиент 10 представляет собой кувыркающийся (иначе неуправляемый) космический аппарат, и позиционирование обслуживающего устройства 310 относительно клиента 10 является таким, как описано в работе "ELSA-D: An In-orbit End-of-Life Demonstration Mission", авторов Blackerby и др., IAC-18, 14 сентября 2018 года, полностью включенной посредством ссылки для всех целей. По завершению этапа 408, способ 400 переходит к этапу 412.
На этапе 412, обслуживающее устройство - космический аппарат 310 состыкуется с клиентским космическим аппаратом 10 с использованием набора захватных рук 130. Захватные руки 310 могут управляться исключительно посредством процессора 320, исключительно посредством ядра или процессора корпуса обслуживающего устройства, отличного от процессора 320, либо посредством их комбинации. Захватные руки 130 могут зацеплять интерфейсное кольцо 30 клиента 10 и/или могут зацеплять компонент или часть клиента 10, отличную от клиентского интерфейсного кольца 30. В одном варианте осуществления, набор захватных рук 30 зацепляет и состыкуется с одним или более физических удлинений корпуса 20 клиента 10. По завершению этапа 412, способ 400 переходит к этапу 416.
На этапе 416, процессор 320 активирует руку манипулятора (или набор рук манипулятора, например, в системе 500 по фиг.5, в котором обслуживающее устройство 510 имеет две руки манипулятора). Активация может заключать в себе диагностику, проверки работоспособности и/или работы системы, чтобы обеспечивать надлежащую работу руки 640 манипулятора (См. фиг.6A-D для трехразрядных элементов, начинающихся с 6). Манипулятор 640 может иметь начальную или убранную конфигурацию, когда обслуживающее устройство 310 сначала состыкуется с клиентом 10, например, проиллюстрированным на фиг.6A. По завершению этапа 416, способ 400 переходит к этапу 420.
На этапе 420, разрывной элемент обслуживающего устройства 650 подготавливается для того, чтобы принимать руку 640 манипулятора. Более конкретно, разрывная рука 650 подготавливается для того, чтобы принимать второй конец 644 руки манипулятора, при этом второй конец 644 руки манипулятора располагается напротив первого конца 643 руки манипулятора. Первый конец 643 руки манипулятора прикрепляется к корпусу 620 обслуживающего устройства 610. Подготовка разрывного элемента обслуживающего устройства 650 может включать в себя отсоединение второго конца 654 разрывного элемента обслуживающего устройства от зацепления с корпусом 620 клиента 610, например, отсоединение от обслуживающей полости 671 корпуса 620 обслуживающего устройства 610. Подготовка разрывного элемента обслуживающего устройства 650 также может включать в себя диагностику, проверки работоспособности и/или работы системы разрывного элемента обслуживающего устройства 650. В одном варианте осуществления, начальная убранная конфигурация разрывного элемента обслуживающего устройства 650 может представлять собой смотанную конфигурацию, как показано на фиг.6A. По завершению этапа 420, способ 400 переходит к этапу 424.
На этапе 424, разрывной элемент обслуживающего устройства 650 соединяется с рукой 640 манипулятора. Более конкретно, второй конец 644 руки манипулятора соединяется со вторым концом 654 разрывного элемента обслуживающего устройства, с тем чтобы представлять наружную поверхность второго конца 654 разрывного элемента обслуживающего устройства, который имеет возможность соединяться или подключаться к клиентскому разрывному соединителю 40. Второй конец 644 руки манипулятора адаптируется или конфигурируется таким образом, что, при вращении и/или повороте, ранее обращенный вовнутрь конец второго конца 654 разрывного элемента обслуживающего устройства вращается таким образом, что он обращен наружу (следует сравнивать относительное позиционирование второго конца 644 руки манипулятора и второго конца 654 разрывного элемента обслуживающего устройства на фиг.6B и фиг.6C). В одном варианте осуществления, взаимодействие или зацепление второго конца 654 разрывного элемента обслуживающего устройства и второго конца 654 разрывного элемента обслуживающего устройства использует технологии или элементы, описанные в WIPO-заявке WO 2019/068547, авторов Schadler и др., включенной посредством ссылки для всех целей. Конечная конфигурация присоединенной или соединенной пары второго конца 644 руки манипулятора и второго конца 654 разрывного элемента обслуживающего устройства описывается относительно фиг.8. (Следует отметить, что в некоторых конфигурациях, например, которые проиллюстрированы на фиг.1B и 5, рука манипулятора и разрывной элемент обслуживающего устройства представляют собой интегрированный модуль, за счет этого исключая потребность в этапе 424). По завершению этапа 424, способ 400 переходит к этапу 428.
На этапе 428, процессор 360 направляет или управляет рукой 140 манипулятора, с прикрепленным вторым концом 654 разрывного элемента обслуживающего устройства, в позицию рядом или около клиентского разрывного соединителя 40, как показано на фиг.6C-D. Процессор 360, как вкратце пояснено выше, может работать в наборе режимов управления при управлении или маневрировании руки 140 манипулятора. Набор режимов управления может принимать множество вводов датчиков, чтобы выполнять режимы управления. Например, процессор 360 может первоначально осуществлять операции или управлять рукой 140 манипулятора в первом режиме позиционирования с помощью данных датчиков, предоставленных посредством одного или более датчиков, смонтированных на корпусе 320 обслуживающего устройства, таких как камера с широким полем обзора. В другом примере, процессор 320 может управлять рукой манипулятора с помощью одного или более датчиков, смонтированных на руке 140 манипулятора, например, на или около второго конца 644 руки манипулятора, и/или смонтированных на или около второго конца 654 разрывного элемента обслуживающего устройства, таких как радар или микрокамера (см. фиг.8).
Процессор 360 может комбинировать доступные датчики, чтобы позиционировать и обеспечивать маневрирование руки 140 манипулятора в любом числе режимов управления в любом числе схем на основе законов управления, известных специалистам в данной области техники, которые включают в себя адаптивное управление, стохастическое управление, нейронную сеть, управление на основе AI или другой технологии машинного обучения и т.д. Процессор 360 может использовать технологии машинного зрения для того, чтобы помогать или обеспечивать управление рукой 140 манипулятора. Рука манипулятора может работать автономно, полуавтономно или вручную в течение всей или частей работы. (Ввод вручную предоставляется наземным оператором, обменивающимся данными с процессором 360 посредством наземных вводов команд). По завершению этапа 428, способ 400 переходит к этапу 432.
В одном варианте осуществления, процессор отслеживает кинематику руки 140 манипулятора через положения колен или шарниров руки 140 манипулятора и/или позицию второго конца 644 руки манипулятора, чтобы управлять движением руки 140 манипулятора. В таком варианте осуществления, в силу знания геометрий клиентского космического аппарата (например, местоположения целевого клиентского разрывного соединителя и все помехи, с которыми рука манипулятора может сталкиваться при маневрировании в разрывной соединитель), второй конец 644 руки манипулятора с прикрепленным обслуживающим разрывным элементом может обеспечивать маневрирование разрывного элемента обслуживающего устройства в позицию около или рядом с разрывным соединителем, если не подключать разрывной элемент обслуживающего устройства к разрывному соединителю.
На этапе 432, выполняется запрос в отношении того, доступно и должно использоваться либо нет вращение клиентского космического аппарата 10 вокруг интерфейсного кольца 30, причем такое вращение выполняется посредством набора захватных рук 130. Такие характеристики обеспечивают возможность выбираемого относительного позиционирования между клиентским разрывным соединителем 40 и вторым концом 644 руки манипулятора (и в силу этого также соединенным вторым концом 654 разрывного элемента обслуживающего устройства) и за счет этого уменьшают степени свободы (DOF), требуемые для рук манипулятора. Иначе говоря, если вращение клиентского космического аппарата 10 вокруг интерфейсного кольца 30 доступно, степени свободы, требуемые для того, чтобы предоставлять соединение между вторым концом 654 разрывного элемента обслуживающего устройства и клиентским разрывным соединителем 40, могут совместно использоваться рукой 640 манипулятора и соединением между клиентом 10 и обслуживающим устройством 110. Например, если обслуживающее устройство 310 состыковывается с клиентом 10 через клиентское интерфейсное кольцо 30 таким образом, что клиент 10 находится в предварительно определенной ориентации относительно обслуживающего устройства 310, и обслуживающее устройство 110 может дополнительно вращаться вокруг интерфейсного кольца 30 и прижиматься к нему с любым требуемым тактированием, то только три степени свободы требуются для руки 140 манипулятора, а именно, радиальные и осевое перемещение в пространстве относительно общей оси Z корпуса (121 и 21 по фиг.1A) тандемной или спаренной системы космических аппаратов для того, чтобы вести второй конец 654 разрывного элемента обслуживающего устройства вдоль оси подключения (41, 646 и 656 по фиг.6D), и вращение второго конца 654 разрывного элемента обслуживающего устройства, чтобы ориентироваться корректно вокруг оси подключения. (В числе прочего, рука манипулятора с меньшим числом DoF может предлагать преимущества относительно руки манипулятора с большим числом DoF, такие как сокращенные затраты, менее строгие требования по пространству для убирания, менее строгие требования по мощности, повышенные надежность и т.д.).
Если ответ на запрос этапа 432 представляет собой "Да", то способ 400 переходит к этапу 433, на котором клиент 10 вращается или захватывается способом, описанным выше, с тем чтобы уменьшать степени свободы, требуемые для рук 140 манипулятора. По завершению этапа 433, способ 400 переходит к этапу 434. На этапе 434, рука 140 манипулятора с меньшим числом степеней свободы, как описано, может использоваться, например, рука 140 манипулятора с тремся DoF, чтобы подключать второй конец 654 разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю 40. Дополнительные подробности подключения второго конца 654 разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю 40 предоставляются на фиг.7-9. На этапе 434, также может использоваться рука 140 манипулятора по меньшей мере с 3 DoF, в том числе рука манипулятора с шестью DoF. По завершению этапа 434, способ 400 переходит к этапу 440.
Если ответ на запрос этапа 432 представляет собой "Нет", затем способ переходит к этапу 436, на котором рука 140 манипулятора с шестью DoF используется для того, чтобы подключать второй конец 654 разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю 40. Дополнительные подробности подключения второго конца 654 разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю 40 предоставляются на фиг.7-9. По завершению этапа 436, способ 400 переходит к этапу 440.
На этапе 440, соединение между обслуживающим космическим аппаратом 310 и клиентским космическим аппаратом 10 устанавливается. Более конкретно, физическое соединение и/или электрическое соединение выполняется между вторым концом 654 разрывного элемента обслуживающего устройства и клиентским разрывным соединителем 40. Электрическое соединение обеспечивает возможность выполнения любого числа функций обслуживания для клиента 10 посредством обслуживающего устройства 310. Например, вспомогательный источник 380 мощности может предоставлять, под управлением процессора 320, электрическую мощность в клиент 10. В качестве другого примера, электрические сигналы могут передаваться, чтобы выполнять функции проверки состояния или техобслуживания, например, выполнять диагностику для клиента. В качестве другого примера, электрическое соединение может использоваться для того, чтобы добавлять или улучшать киберзащиту через обслуживающее устройство 310 для клиента 10 и/или добавлять избыточность для клиента 10, например, посредством предоставления подсистемы избыточной телеметрии, отслеживания и управления (TT и C) для клиента 10. Электрическое соединение между обслуживающим устройством 310 и клиентом 10 может использоваться для связи в одном или в обоих направлениях, например, диагностические данные или данные состояния могут передаваться из клиента 10 в обслуживающее устройство 310, резервирование клиентских данных может выполняться посредством передачи данных из клиента 10 в обслуживающее устройство 310, и процедуры обновления программного обеспечения могут передаваться из обслуживающего устройства 310 в клиент 10. По завершению этапа 440, способ 400 переходит к этапу 444.
На этапе 444, выполняется запрос в отношении того, имеет или нет обслуживающее устройство - космический аппарат 310 съемный обслуживающий комплект 370, причем съемный 370 должен закрепляться или соединяться с клиентским космическим аппаратом 10. Если ответ на запрос этапа 444 представляет собой "Да", способ 400 переходит к этапу 445, на котором съемный обслуживающий комплект 370 отсоединяется от обслуживающего устройства 310 посредством руки 140 манипулятора и позиционируется и закрепляется в выбираемом местоположении на/в клиенте 10. Как пояснено выше, съемный обслуживающий комплект 370 может быть выполнен с возможностью соединяться с одним или более клиентских разрывных соединителей 40 клиента 10, непосредственно или посредством разрывного элемента обслуживающего устройства 150. После завершения этапа 445, способ 400 переходит к этапу 446, на котором рука 140 манипулятора отсоединяется от обслуживающего комплекта 370. По завершению этапа 446, способ 400 переходит к этапу 448. Если ответ на запрос этапа 444 представляет собой "Нет", способ 400 переходит к этапу 448.
На этапе 448, второй конец 654 разрывного элемента обслуживающего устройства отсоединяется или отключается от клиентского разрывного соединителя 40, и разрывной элемент обслуживающего устройства 40 убирается в/на обслуживающем космическом аппарате 310. Обычно, отключение второго конца 654 разрывного элемента обслуживающего устройства от клиентского разрывного соединителя 40 проходит аналогичным, но противоположным способом относительно подключения, например, второй конец 654 разрывного элемента обслуживающего устройства вращается в противоположном угловом направлении вдоль оси 41 Z подключения относительно углового направления, требуемого во время подключения, и второй конец 654 разрывного элемента обслуживающего устройства отводится или оттаскивается от клиентского разрывного соединителя 40. В одном варианте осуществления, разрывной элемент обслуживающего устройства 40 убирается в конфигурации, аналогичной начальной убранной позиции по фиг.6A. По завершению этапа 448, способ 400 переходит к этапу 452.
На этапе 452, рука 140 манипулятора убирается на/в обслуживающем космическом аппарате 310. В одном варианте осуществления, рука 140 манипулятора убирается в конфигурации, аналогичной начальной убранной позиции по фиг.6A. По завершению этапа 452, способ 400 переходит к этапу 456.
На этапе 456, обслуживающее устройство - космический аппарат 310 расстыковывается от клиентского космического аппарата 10, и способ 400 переходит к этапу 460, на котором способ завершается.
Фиг.6A-D предоставляют последовательность подробных видов сверху другого варианта осуществления обслуживающей системы 600 орбитального космического аппарата. Вариант осуществления содержит обслуживающее устройство - космический аппарат 610, содержащий корпус 620 обслуживающего устройства, одну руку 640 манипулятора и один разрывной элемент обслуживающего устройства 650, убранный в обслуживающей полости 671, и клиент 10 с одним разрывным соединителем 40, расположенным на корпусе 20 клиента. Набор из фиг.6A-D подробнее описывается относительно способа 700 по фиг.7.
Манипулятор 640 содержит первый конец 643 манипулятора, прикрепленный или закрепленный на крепежном элементе 622 руки манипулятора обслуживающего устройства, причем крепежный элемент 622 руки манипулятора обслуживающего устройства прикрепляется или закрепляется на корпусе 620 обслуживающего устройства. Рука 640 манипулятора дополнительно содержит среднюю часть 645, содержащую набор из двух шарнирных коленей, и второй конец 644 манипулятора, выполненный с возможностью зацепляться или соединяться со вторым концом 654 разрывного элемента обслуживающего устройства. Набор колен руки 640 манипулятора функционирует в качестве шарнирных коленей, чтобы обеспечивать поворот или вращение между соединенными или прикрепленными компонентами. Например, шарнир, ассоциированный с первым концом 643 манипулятора, предоставляет вращение первого конца 643 манипулятора вокруг крепежного элемента 622 руки манипулятора обслуживающего устройства. Другие конфигурации коленей и компонентов руки 640 манипулятора являются возможными, в том числе альтернативные и/или дополнительные колена относительно проиллюстрированных шарнирных коленей, как известно специалистам в данной области техники.
Рука 640 манипулятора представляет собой руку представляет собой руку манипулятора с шестью DoF и проиллюстрирована в последовательности состояний или конфигураций на каждом из фиг.6A-D. Обычно, рука 640 манипулятора функционирует с возможностью прикреплять второй конец 644 манипулятора к второму концу 654 разрывного элемента обслуживающего устройства, как проиллюстрировано на фиг.6B, обеспечивать маневрирование второго конца 654 разрывного элемента обслуживающего устройства в позицию рядом с разрывным соединителем 40 на фиг.6C (что требует, в числе прочего, трехмерного позиционирования второго конца 654 разрывного элемента обслуживающего устройства рядом с разрывным соединителем 40), чтобы совмещать второй конец 654 разрывного элемента обслуживающего устройства на оси Z с осью 41 Z подключения разрывного соединителя 40, как проиллюстрировано на фиг.6D, и подключаться к второму концу 654 разрывного элемента обслуживающего устройства с разрывным соединителем 40.
Разрывной элемент обслуживающего устройства 650 содержит первый конец 623 разрывного элемента обслуживающего устройства, прикрепленный или закрепленный на крепежном элементе 623 разрывного элемента обслуживающего устройства, причем крепежный элемент 623 разрывного элемента обслуживающего устройства в свою очередь прикрепляется или закрепляется на корпусе 620 обслуживающего устройства. Разрывной элемент обслуживающего устройства 650 дополнительно содержит второй конец 654 разрывного элемента обслуживающего устройства, выполненный с возможностью зацепляться или соединяться со вторым концом 644 манипулятора. Разрывной элемент обслуживающего устройства 650 проиллюстрирован в последовательности состояний или конфигураций на каждом из фиг.6A-D.
На фиг.6A разрывной элемент обслуживающего устройства 650 проиллюстрирован в первом (или убранном) состоянии разрывного элемента обслуживающего устройства, в котором разрывной элемент обслуживающего устройства 650 убирается вовнутрь в корпус 620 обслуживающего устройства 610 в обслуживающей полости 671 в смотанной конфигурации. Другие убранные позиции или конфигурации разрывного элемента обслуживающего устройства 650 являются возможными, в том числе частично или полностью внешние для корпуса 620 (не показан), что очень похоже на способ убирания руки 640 манипулятора.
Фиг.6B иллюстрирует руку 640 манипулятора и разрывной элемент обслуживающего устройства 650 в соответствующем втором состоянии, в котором второй конец 644 манипулятора зацепляется со вторым концом 654 разрывного элемента обслуживающего устройства, при этом разрывной элемент обслуживающего устройства 650 остается в смотанном состоянии или смотанной конфигурации.
Фиг.6C иллюстрирует руку 640 манипулятора и разрывной элемент обслуживающего устройства 650 в соответствующем третьем состоянии, в котором второй конец 644 манипулятора зацепляется со вторым концом 654 разрывного элемента обслуживающего устройства, при этом соединенная или зацепленная пара из второго конца 654 разрывного элемента обслуживающего устройства и второго конца 644 манипулятора перемещается к разрывному соединителю 40 клиента 10. В этом третьем состоянии, соединенная зацепленная пара из второго конца 654 разрывного элемента обслуживающего устройства и второго конца 644 манипулятора имеет осевую относительную ось 644, 654 Z, и разрывной соединитель 40 имеет ось 41 Z (также называется "осью 41 подключения").
Фиг.6D иллюстрирует руку 640 манипулятора и разрывной элемент обслуживающего устройства 650 в соответствующем четвертом состоянии, в котором второй конец 644 манипулятора остается зацепленным со вторым концом 654 разрывного элемента обслуживающего устройства, при этом соединенная или зацепленная пара из второго конца 654 разрывного элемента обслуживающего устройства и второго конца 644 манипулятора, в общем, совмещается с разрывным соединителем 40 клиента 10. В этом четвертом состоянии, соединенная зацепленная пара из второго конца 654 разрывного элемента обслуживающего устройства и второго конца 644 манипулятора имеет осевую относительную ось Z 644, 654, в общем, или практически совмещенную с осью 41 подключения разрывного соединителя 40, и второй конец 654 разрывного элемента обслуживающего устройства позиционируется с возможностью подключаться к разрывному соединителю 40 (см. фиг.7-8 и ассоциированное описание).
Фиг.7 предоставляет блок-схему последовательности операций способа операций руки манипулятора и разрывного элемента обслуживающего устройства для того, чтобы подключаться и отключаться к/от разрывного соединителя. В дальнейшем описывается способ 700 по фиг.7 со ссылкой на другие чертежи раскрытия сущности, в частности, на фиг.3, 4A-B и 6A-D.
Обычно, способ 700 начинается на этапе 704 и завершается на этапе 740. Любые из этапов, функций и операций, поясненных в данном документе, могут выполняться непрерывно и автоматически. В некоторых вариантах осуществления, один или более этапов способа использования 700, в том числе этапы способа 700, могут содержать компьютерное управление, использование компьютерных процессоров и/или некоторый уровень автоматизации. Фактически, большая часть, если не все этапы способа 700 выполняются автоматически, главным образом, если не полностью посредством процессора 320. Тем не менее, в некоторых вариантах осуществления, некоторые этапы или части некоторых этапов выполняются совместно с или исключительно с использованием вмешательства человека. Например, после того как электрическое соединение устанавливается между обслуживающим космическим аппаратом 310 и клиентским космическим аппаратом 10 на этапе 724, человек может вмешиваться, чтобы направлять конкретные действия обслуживания для клиентского космического аппарата 10. Этапы отвлеченно выполняются в возрастающей числовой последовательности, хотя, в некоторых вариантах осуществления, некоторые этапы могут опускаться, некоторые этапы могут добавляться, и этапы могут выполняться не в возрастающем числовом порядке. Когда способ упоминает пользователя, пользователь может представлять собой одного или более пользователей. Пользователь может взаимодействовать либо выполнять один или более описанных этапов посредством использования дисплея/GUI.
После начала на этапе 704, способ 700 переходит к этапу 708. На этапе 708, рука 140 манипулятора активируется, и разрывной элемент обслуживающего устройства 150 подготавливается для того, чтобы принимать руку 140 манипулятора. Этап 708 является почти идентичным этапу 416 способа 400, на котором рука 140 манипулятора не убирается, включается и проверяется на предмет работы, и этапу 420 способа 400, на котором разрывной элемент обслуживающего устройства 150 не убирается и аналогично проверяется на предмет работы. Фиг.6A иллюстрирует этап 708 относительно руки 140 манипулятора и разрывного элемента обслуживающего устройства 150 обслуживающего устройства 610. Если одно или оба из разрывного элемента обслуживающего устройства 150 и руки 140 манипулятора убираются в отсеке или полости корпуса 320 обслуживающего устройства 310, такой отсек открывается, чтобы обеспечивать возможность выхода и операции разрывного элемента обслуживающего устройства 150 и/или руки 140 манипулятора. После завершения этапа 708, способ 700 переходит к этапу 712.
На этапе 712, второй конец 644 руки манипулятора соединяется со вторым концом 654 разрывного элемента обслуживающего устройства, как показано на фиг.6B. Этап 712 является аналогичным этапу 424 способа 400. На этапе 712, электронные схемы руки 140 манипулятора, например, электронные схемы второго конца 644 руки манипулятора, могут формировать электрическое соединение со вторым концом 654 разрывного элемента обслуживающего устройства. После завершения этапа 712, способ 700 переходит к этапу 716.
На этапе 716, второй конец 644 руки манипулятора, соединенный со вторым концом 654 разрывного элемента обслуживающего устройства, маневрирует к клиентскому разрывному соединителю 40, как показано на фиг.6C. Этап 716 является аналогичным этапу 428 способа 400. Во время этапа 716, разрывной элемент обслуживающего устройства 150 разворачивает или разматывается. В одном варианте осуществления, во время этапа 716 дополнительные датчики, ассоциированные со вторым концом 644 руки манипулятора, могут активироваться, причем такие дополнительные датчики обеспечивают точное управление вторым концом 644 руки манипулятора и подробнее описываются ниже относительно фиг.8. После завершения этапа 716, способ 700 переходит к этапу 720.
На этапе 720, оси Z присоединенного или соединенного второго конца 644 манипулятора и второго конца 654 разрывного элемента обслуживающего устройства практически совмещаются с осью Z клиентского разрывного соединителя 41, как проиллюстрировано на фиг.6D. Иначе говоря, совместно используемая ось 646 Z второго конца 644 манипулятора и ось 656 Z второго конца 654 разрывного элемента обслуживающего устройства практически совмещаются с осью 41 подключения разрывного соединителя 40. После завершения этапа 720, способ 700 переходит к этапу 724.
На этапе 724, второй конец 654 разрывного элемента обслуживающего устройства, посредством маневрирования и управления вторым концом 644 манипулятора посредством процессора 320, подключается к разрывному соединителю 40 вдоль оси 41 подключения. Этап 724 является аналогичным альтернативным этапам 436 и 434 способа 400. Дополнительные подробности операций подключения этапа 724 предоставляются относительно фиг.8 и 9, в том числе любые требования по вращению второго конца 654 разрывного элемента обслуживающего устройства, чтобы удовлетворять требованиям по тактированию разрывного соединителя 40. После завершения этапа 724, способ 700 переходит к этапу 728.
На этапе 728, клиентский космический аппарат 10 обслуживается так, как описано выше. Обслуживание может содержать передачу электрической мощности в клиент 10 посредством передачи электрической энергии, накопленной во вспомогательном источнике 380 мощности, и однонаправленную или двунаправленную передачу электрических сигналов, например, передачу программного обеспечения или прием данных космического аппарата, добавление усовершенствованных мер предотвращения проникновений или обеспечения кибербезопасности, добавление избыточности для клиента, например, посредством предоставления подсистемы избыточной телеметрии, отслеживания и управления, техподдержки или исправления клиентского программного обеспечения и т.д.
Во время обслуживания клиентского космического аппарата 10 посредством клиентского разрывного соединителя 40, рука 140 манипулятора может оставаться или может не оставаться зацепленной с разрывным соединителем 40, и, в частности, может оставаться или может не оставаться зацепленной со вторым концом 654 разрывного элемента обслуживающего устройства, в вариантах осуществления системы, в которых второй конец 654 разрывного элемента обслуживающего устройства выполнен с возможностью оставаться зацепленным или подключенным к клиентскому разрывному соединителю 40 без необходимости непрерывного зацепления руки 140 манипулятора. Иначе говоря, в некоторых вариантах осуществления, рука 140 манипулятора не должна обязательно оставаться прикрепленной к обслуживающему разрывному элементу во время обслуживания клиента, поскольку второй конец 654 разрывного элемента обслуживающего устройства, после подключения к клиентскому разрывному соединителю 40, остается прочно подключенным без необходимости непрерывного соединения (например, прямого давления вдоль оси подключения) с рукой 140 манипулятора. Такое непрерывное подключение без посторонней помощи разрывного элемента обслуживающего устройства к разрывному соединителю 40 может обеспечиваться посредством, в числе прочего, геометрии подключения (например, требуемого тактирования и вращения, поясненных ниже), фрикционной посадки или посадки с натягом подключения и т.д. Способность разрывного элемента обслуживающего устройства оставаться подключенным к разрывному соединителю 40 без помощи руки 140 манипулятора является преимущественной, поскольку такая возможность позволяет, в числе прочего, руке манипулятора выполнять другие функции во время обслуживания клиента, такие как прикрепление обслуживающего комплекта к клиенту, прикрепление второго разрывного элемента обслуживающего устройства к второму разрывному соединителю и т.д. После завершения этапа 724, способ 700 переходит к этапу 732.
На этапе 732, второй конец 654 разрывного элемента обслуживающего устройства отключается или отсоединяется от разрывного соединителя 40 вдоль оси 41 подключения. Этап 732 является аналогичным аспектам этапа 448 способа 400. В одном варианте осуществления, в котором разрывной соединитель имеет требования по тактированию, второй конец 654 разрывного элемента обслуживающего устройства сначала вращается посредством второго конца 644 руки манипулятора до аксиального отделения или отхода от разрывного соединителя 40. После завершения этапа 732, способ 700 переходит к этапу 736.
На этапе 736, рука 640 манипулятора сначала убирает разрывной элемент обслуживающего устройства 650 внутрь полости 671, требуя сворачивания или складывания разрывного элемента обслуживающего устройства 650. Этап 736 является аналогичным аспектам этапов 448 и 452 способа 400. В одном варианте осуществления, убирание разрывного элемента обслуживающего устройства 650 упрощается или способствуется посредством механизма, содержащегося внутри или смежного с полостью 671, причем такой механизм необязательно управляется посредством процессора 360. Например, механизм может содержать привязное крепление, которое может наматываться или сматываться с удлинением или разворачиванием разрывного элемента обслуживающего устройства 650, пружину или другой втягивающийся механизм, электромагнит и т.д. После того, как рука 640 манипулятора убирает разрывной элемент обслуживающего устройства 650, сама рука манипулятора убирается. После завершения этапа 736, способ 400 переходит к этапу 740, и способ 4500 завершается.
Фиг.8 иллюстрирует подробный вид 800 в перспективе второго конца 954 обслуживающего разрывного соединителя и концевого соединителя 40 клиентского космического аппарата по мере того, как присоединенные концы руки 140 манипулятора обслуживающего устройства - космического аппарата и разрывного элемента обслуживающего устройства 150 обслуживающего устройства - космического аппарата приближаются к концевому соединителю 40, чтобы формировать соединение.
Второй конец 844 руки манипулятора, зацепленный или соединенный со вторым концом 854 разрывного элемента обслуживающего устройства, показывается на фиг.8 как приближающийся к поверхности 982 разрывного соединителя клиентского космического аппарата второго конца 954 разрывного элемента обслуживающего устройства. Система 801 координат показывает ось Z подключения, совмещенную для каждого из этих компонентов. Иначе говоря, ось 956 Z разрывного соединителя совмещается с общей осью Z соединенного второго конца 844 руки манипулятора и второго конца 854 разрывного элемента обслуживающего устройства.
Поверхность 982 разрывного для соединителя второго конца разрывного соединителя 954 проиллюстрирована как проходящая из корпуса 820 клиентского космического аппарата с набором из трех выемок 991, 992 и 993 для обеспечения тактирования. Набор выемок для обеспечения тактирования либо апертур или пустот 991, 992, 993 позиционируется с радиальными смещениями на 90 градусов друг от друга в симметричной компоновке. Поверхность 954 разрывного соединителя также содержит пару выемок 997 и 998 для приема штифтов и прямоугольный штифтовой порт 995. Пара выемок 997 для приема штифтов располагаются на противоположных концах оси 982x X поверхности разрывного соединителя.
Другие конфигурации соединений поверхности 954 разрывного соединителя являются возможными: версия, проиллюстрированная на фиг.8, служит только в качестве иллюстрации. Любая предлагаемая на рынке конфигурация соединений поверхности 954 разрывного соединителя является возможной, как известно специалистам в данной области техники. Например, поверхность 954 разрывного соединителя и/или концевой соединитель 40 клиентского космического аппарата, в общем, могут быть сконфигурированы так, как описано в работе "Falcon 9 Lunch Payload User's Guide", Rev. 1, Space Exploration Technologies, 09-S-0347 и/или в "Ariane 5 User's Manual", выпуск 5, издание 1, июль 23011, Arianespace, обе из которых полностью включены посредством ссылки для всех целей. В некоторых вариантах осуществления поверхности 954 разрывного соединителя и/или концевого соединителя 40 клиентского космического аппарата, одно или более защелкивающих устройств (либо защелкивающих приемников или защелкивающих удлинений) традиционно используются для того, чтобы соединять разрывной элемент обслуживающего устройства с клиентским разрывным соединителем, когда такое соединение традиционно устанавливается в ходе наземных операций. Такие защелкивающие устройства или другие соединительные механизмы, известные специалистам в данной области техники, могут либо не могут дополнительно или альтернативно быть ассоциированы с системой по раскрытию сущности.
Поверхность 882 второго конца разрывного элемента обслуживающего устройства для второго конца 854 разрывного элемента обслуживающего устройства имеет противостоящий набор соединителей для того, чтобы зацепляться или соединяться с поверхностью 982 разрывного соединителя. В частности, поверхность 882 второго конца разрывного элемента обслуживающего устройства имеет набор из трех закрывающих удлинений 891, 892 и 893 (которые зацепляются с соответствующими выемками 991, 992 и 993 для обеспечения тактирования), пару штифтов 897 и 898 (которые зацепляются с соответствующими выемками 997 и 998 для приема штифтов) и прямоугольный штифтовой штепсель 895 (который зацепляется с прямоугольным штифтовым портом 995). Поверхность 882 второго конца разрывного элемента обслуживающего устройства садится в кромку 881 второго конца руки манипулятора. Поверхность 882 второго конца разрывного элемента обслуживающего устройства имеет ось 882x X поверхности второго конца разрывного элемента обслуживающего устройства и ось 882y Y поверхности второго конца разрывного элемента обслуживающего устройства, причем поверхность 882 второго конца разрывного элемента обслуживающего устройства смещается при вращении на поверхностный угол g второго конца разрывного элемента обслуживающего устройства.
Кромка 881 второго конца руки манипулятора содержит датчик 885 и набор удлиняющих направляющих 886, 887, чтобы помогать в точном управлении или позиционировании поверхности 882 второго конца разрывного элемента обслуживающего устройства. Другие конфигурации датчиков и удлинений являются возможными.
В одном варианте осуществления, датчик 885 представляет собой камеру, например, камеру для съемки в видимом диапазоне, камеру для съемки в инфракрасном диапазоне или другую камеру. Датчик 885 считывает или измеряет данные датчиков, которые предоставляются в процессор 360. Данные датчика 885 могут содержать, например, изображения, например, собираемые из камеры, данные дальности, например, собираемые из радара или лидара, данные силы, например, собираемые из датчика силы, данные деформации, собираемые из тензодатчика и физического датчика или оборудования позиционирования (например, удлиняющих направляющих 886, 887). В одном варианте осуществления, датчик представляет собой микрокамеру, например, изготовленную компанией Scoutcam™ и/или описанную в патенте США номер 10420216, авторов Govrin и др., полностью содержащемся по ссылке для всех целей. Датчик 885 может представлять собой набор датчиков, содержащих радарные, ладарные, лидарные, электромагнитные и другие датчики, известные специалистам в данной области техники. Один или более датчиков 885 предоставляют измерения датчика в процессор, чтобы помогать или обеспечивать управление поверхностью 882 второго конца разрывного элемента обслуживающего устройства посредством управления второй рукой манипулятора.
В некоторых вариантах осуществления, дополнительные или альтернативные датчики могут монтироваться на одном или более из корпуса обслуживающего устройства или компонентов обслуживающего устройства, чтобы помогать и/или обеспечивать маневрирование руки манипулятора в место рядом с клиентским разрывным соединителем и/или через операции подключения/отключения. Например, датчик, такой как камера с широким полем обзора, может монтироваться на поверхности корпуса обслуживающего устройства, например, на поверхности, обращенной к клиентскому разрывному соединителю, чтобы предоставлять возможность общего или первичного маневрирования руки манипулятора. В одном варианте осуществления, один или более датчиков сближения, например, камер сближения, используются в качестве датчиков, чтобы помогать или обеспечивать маневрирование руки манипулятора. В качестве другого примера, датчик, такой как лидар, может позиционироваться или монтироваться на втором конце 844 руки манипулятора, чтобы помогать и/или обеспечивать маневрирование руки манипулятора, например, при зацеплении или прикреплении к второму концу 654 разрывного элемента обслуживающего устройства.
Набор удлиняющих направляющих 886, 887 задает конусообразное удлинение, чтобы помогать в точном управлении или позиционировании поверхности 882 второго конца разрывного элемента обслуживающего устройства. В частности, набор удлиняющих направляющих 886, 887 может, в одной конфигурации, физически зацеплять поверхность периметра, окружающую корпус 820 клиентского космического аппарата. В одной конфигурации, набор удлиняющих направляющих 886, 887 является втягивающимся. В одном варианте осуществления, конусообразная направляющая садится в конец поверхности 882 второго конца разрывного элемента обслуживающего устройства и/или второго конца 844 руки манипулятора, чтобы помогать в точном управлении поверхностью 882 второго конца разрывного элемента обслуживающего устройства. В одном варианте осуществления, защитное покрытие садится с возможностью проходить из поверхности 882 второго конца разрывного элемента обслуживающего устройства и/или второго конца 844 руки манипулятора покрывать или закрывать соединенный интерфейс второго конца 954 обслуживающего разрывного соединителя при подключении к концевому соединителю 40 клиентского космического аппарата.
Как вкратце пояснено выше, в некоторых вариантах осуществления, рука 140 манипулятора не должна обязательно оставаться прикрепленной к обслуживающему разрывному элементу во время обслуживания клиента, поскольку поверхность 882 второго конца разрывного элемента обслуживающего устройства, после подключения к второму концу 954 клиентского разрывного соединителя, остается прочно подключенной без необходимости непрерывного соединения с рукой 140 манипулятора. Непрерывное подключение без посторонней помощи разрывного элемента обслуживающего устройства к разрывному соединителю 40 может предоставляться посредством признаков второго конца 854 разрывного элемента обслуживающего устройства. Например, второй конец 854 разрывного элемента обслуживающего устройства может формировать посадку с натягом или фрикционную посадку со вторым концом 954 клиентского разрывного соединителя таким образом, что после того как они подключаются друг к другу, соединение является стабильным и прочным. В другом примере, второй конец 854 разрывного элемента обслуживающего устройства может содержать прорези либо другие геометрии или признаки, которые, как известно специалистам в данной области техники, предоставляют прочное и стабильное физическое соединение. "Прочное и стабильное соединение" означает соединение, которое остается соединенным даже при приеме относительно незначительных силовых возмущений, таких как вибрация, силовые воздействия, например, встряхивание и кручения или вращения. В другом примере, набор штекерных/розеточных тактирующих соединений (набор из трех закрывающих удлинений 891, 892 и 893 поверхности 882 второго конца разрывного элемента обслуживающего устройства, которые зацепляются с соответствующими выемками 991, 992 и 993 для обеспечения тактирования), предоставляет стабильное и прочное соединение.
Следует отметить, что в ходе операций подключения (и отключения) между вторым концом 854 разрывного элемента обслуживающего устройства и вторым концом 954 клиентского разрывного соединителя, сила может приложиться к одному или более компонентов системы присоединенных друг к другу обслуживающего устройства и клиента, например, к набору захватных рук, к руке манипулятора и т.д. В примерах, описанных выше, предусматривающих посадку с натягом и тактирующую посадку, такие силы должны передаваться в один или более системных компонентов.
В некоторых вариантах осуществления и/или операциях, такие силы в силу этого вообще не прикладываются или минимальные силы прикладываются во время подключения и/или отключения. Например, в конфигурации по фиг.7, набор удлиняющих направляющих 886, 887 может разрешать или обеспечивать операции подключения и отключения, которые вообще не передают или передают минимальные силы в систему. В одном варианте осуществления, набор удлиняющих направляющих 886, 887 выполнен с возможностью предоставлять прочное прикрепление к периметру вокруг или в области, смежной с поверхностью 954 разрывного соединителя таким образом, что отсутствие передачи или передача минимальных сил в систему прикладывается к системе присоединенных друг к другу обслуживающего устройства и клиента. В одном варианте осуществления, набор удлиняющих направляющих 886, 887 образует или вместо этого представляет собой непрерывную или почти непрерывную воронкообразную форму (шире по диаметру по мере того, как форма проходит в направлении от второго конца 954 клиентского разрывного соединителя), причем воронкообразная форма зацепляется с периметром вокруг или областью, смежной с поверхностью 954 разрывного соединителя таким образом, что отсутствие передачи или передача минимальных сил в систему прикладывается к системе присоединенных друг к другу обслуживающего устройства и клиента.
Второй конец 854 разрывного элемента обслуживающего устройства по фиг.8 проиллюстрирован с направлением из внутренней части второго конца 844 руки манипулятора через окно 846 второго конца руки манипулятора. Внутренняя часть разрывного элемента обслуживающего устройства проиллюстрирована с возможностью показывать жгут 856 проводов, удерживаемый в обслуживающем разрывном элементе. Число и тип проводов в жгуте 856 проводов представляют собой функцию, в числе прочего, из функций, выполняемых посредством разрывного соединителя, традиционно используемого в ходе наземных операций, чтобы обмениваться данными с клиентом.
Фиг.9 является блок-схемой последовательности операций способа использования при работе руки манипулятора и конца разрывного элемента обслуживающего устройства в ходе точных операций управления около клиентского разрывного соединителя, как подробно указано на фиг.8. В дальнейшем описывается способ 900 по фиг.9 со ссылкой на другие чертежи раскрытия сущности, в частности, на фиг.3 и 8.
Обычно, способ 900 начинается на этапе 904 и завершается на этапе 940. Любые из этапов, функций и операций, поясненных в данном документе, могут выполняться непрерывно и автоматически. В некоторых вариантах осуществления, один или более этапов способа использования 900, в том числе этапы способа 900, могут содержать компьютерное управление, использование компьютерных процессоров и/или некоторый уровень автоматизации. Фактически, большая часть, если не все этапы способа 900 выполняются автоматически, главным образом, если не полностью посредством процессора 320. Тем не менее, в некоторых вариантах осуществления, некоторые этапы или части некоторых этапов выполняются совместно с или исключительно с использованием вмешательства человека. Например, для человека-оператора можно определять задачу, чтобы подтверждать конечное продвижение второго конца разрывного элемента обслуживающего устройства на этапе 928, подтверждать конечное вращение второго конца разрывного элемента обслуживающего устройства на этапе 932 и/или подтверждать передачу мощности или электрической энергии между обслуживающим устройством и клиентом (например, этап 728 способа 700).
Этапы отвлеченно выполняются в возрастающей числовой последовательности, хотя, в некоторых вариантах осуществления, некоторые этапы могут опускаться, некоторые этапы могут добавляться, и этапы могут выполняться не в возрастающем числовом порядке. Пользователь может взаимодействовать либо выполнять один или более описанных этапов посредством использования дисплея/GUI.
После начала на этапе 904, способ 900 переходит к этапу 908. На этапе 908, рука 140 манипулятора обеспечивает маневрирование прикрепленного разрывного элемента обслуживающего устройства 150 в позицию рядом или около клиентского разрывного соединителя 40. Процессор 360 может работать в первом режиме управления позиционирования во время этапа 908. Этап 908 является аналогичным этапу 716 способа 700, проиллюстрированному на фиг.6C. После завершения этапа 908, способ 900 переходит к этапу 912.
На этапе 912, система управления точным позиционированием активируется и/или становится доминирующим средством управления руки манипулятора. Управление точным позиционированием обеспечивается, в одном варианте осуществления, посредством одного или более датчиков 885 и/или набора удлиняющих направляющих 886, 887, функционирующих за счет и/или управляемых посредством процессора 360. В одном варианте осуществления, управление точным позиционированием может активироваться только тогда, когда второй конец 844 руки манипулятора, с соединенной поверхностью 882 второго конца разрывного элемента обслуживающего устройства, находится около поверхности 982 разрывного соединителя, чтобы экономить мощность, рассеиваемую при работе одного или более датчиков 885. После завершения этапа 912, способ 900 переходит к этапу 912.
На этапе 916, оси Z поверхности 882 второго конца разрывного элемента обслуживающего устройства практически совмещаются с осью 956 Z разрывного соединителя, как проиллюстрировано на фиг.8 и 6D. После завершения этапа 916, способ 900 переходит к этапу 924.
На этапе 924, начальный физический контакт осуществляется между набором удлиняющих направляющих 886, 887 и окружающей поверхностью корпуса 820 клиентского космического аппарата. При таком контакте (измеренном посредством любого из нескольких средств, в том числе датчика силы, смонтированного на дальнем конце одной или обеих из удлиняющих направляющих 886, 887), продвижение поверхности 882 второго конца разрывного элемента обслуживающего устройства может прекращаться, чтобы выполнять проверки, например, проверки целостности на работе системы перед продолжением. Кроме того, подтверждение человеком выполнения/отказа от выполнения упрочнения соединения может выполняться. После завершения этапа 924, способ 900 переходит к этапу 928.
На этапе 928, поверхность 882 второго конца разрывного элемента обслуживающего устройства продвигается вдоль оси Z 956 к поверхности 982 разрывного соединителя. Во время продвижения, набор удлиняющих направляющих 886, 887 может втягиваться полностью или частично, с тем чтобы отсоединяться от физического контакта с корпусом 820 клиента, или может втягиваться складывающимся или иным способом, с тем чтобы не препятствовать или ограничивать продвижение поверхности 882 второго конца разрывного элемента обслуживающего устройства. После завершения этапа 928, способ 900 переходит к этапу 932.
На этапе 932, с помощью одного или более датчиков 885, управляемых посредством процессора 360, поверхность 882 второго конца разрывного элемента обслуживающего устройства вращается, чтобы совмещаться с поверхностью 982 разрывного соединителя. Более конкретно, вращение поверхности 882 второго конца разрывного элемента обслуживающего устройства выполняется, с тем чтобы совмещать набор трех закрывающих удлинений 891, 892 и 893 с соответствующими выемками 991, 992 и 993 для обеспечения тактирования, совмещать пару штифтов 897 и 898 с соответствующими выемками 997 и 998 для приема штифтов и совмещать прямоугольный штифтовой штепсель 895 с прямоугольным штифтовым портом 995. Такое вращательное совмещение совмещает поверхность 882 второго конца разрывного элемента обслуживающего устройства с поверхностью 982 разрывного соединителя таким образом, что поверхностный угол g второго конца разрывного элемента обслуживающего устройства практически, если не полностью, обнуляется. После завершения этапа 932, способ 900 переходит к этапу 936.
На этапе 936, поверхность 882 второго конца разрывного элемента обслуживающего устройства подвергается конечному продвижению вдоль оси Z 956, чтобы формировать соединение с поверхностью 982 разрывного соединителя. После завершения этапа 936, способ 900 завершается на этапе 940.
Примерные системы и способы этого раскрытия сущности описываются относительно систем и способов использования для предоставления орбитального обслуживания для космического аппарата, такого как спутник. Другие варианты использования или варианты применения к раскрытым системам и способам являются возможными, такие как обслуживание космических телескопов, космических станций и т.д. Кроме того, чтобы исключать излишнее затруднение понимания настоящего раскрытия сущности, вышеприведенное описание опускает определенное число известных структур и устройств и других вариантов применения и вариантов осуществления. Это опускание не должно истолковываться в качестве ограничения объема формулы изобретения. Конкретные подробности изложены с тем, чтобы предоставлять понимание настоящего раскрытия сущности. Тем не менее, следует принимать во внимание, что настоящее раскрытие сущности может осуществляться на практике множеством способов за пределами конкретных подробностей, изложенных в данном документе.
Кроме того, следует принимать во внимание, что различные линии связи, соединяющие элементы, могут представлять собой линии проводной или беспроводной связи либо любую комбинацию вышеозначенного, либо любые другие известные или разрабатываемые в дальнейшем элементы, которые допускают предоставление и/или передачу данных в/из соединенных элементов. Эти линии проводной или беспроводной связи также могут представлять собой защищенные линии связи и могут допускать обмен зашифрованной информацией. Передающие среды, используемые в качестве линий связи, например, могут представлять собой любую подходящую передающую среду/носитель для электрических сигналов, включающую в себя коаксиальные кабели, медный провод и оптоволокно, и могут принимать форму акустических или световых волн, таких как волны, сформированные в ходе радиоволнового и инфракрасного обмена данными.
Кроме того, хотя способы поясняются и иллюстрируются относительно конкретной последовательности событий, следует принимать во внимание, что изменения, добавления и опускания для этой последовательности могут возникать без существенного влияния на работу раскрытых вариантов осуществления, конфигурацию и аспекты.
Может использоваться определенное число варьирований и модификации раскрытия сущности. Должно быть возможным предоставлять некоторые признаки раскрытия сущности без предоставления других из них.
Хотя настоящее раскрытие сущности описывает компоненты и функции, реализованные в аспектах, вариантах осуществления и/или конфигурациях со ссылкой на конкретные стандарты и протоколы, аспекты, варианты осуществления и/или конфигурации не ограничены такими стандартами и протоколами. Другие аналогичные стандарты и протоколы, не упомянутые в данном документе, существуют и считаются включенными в настоящее раскрытие сущности. Кроме того, стандарты и протоколы, упомянутые в данном документе, и другие аналогичные стандарты и протоколы, не упомянутые в данном документе, периодически заменяются на более быстрее или более эффективные эквиваленты, имеющие по существу идентичные функции. Такие заменяемые стандарты и протоколы, имеющие идентичные функции, считаются эквивалентами, включенными в настоящее раскрытие сущности.
Настоящее раскрытие сущности, в различных аспектах, вариантах осуществления и/или конфигурациях, включает в себя компоненты, способы, процессы, системы и/или оборудование, как фактически проиллюстрировано и описано в данном документе, в том числе различные аспекты, варианты осуществления, варианты осуществления конфигураций, их субкомбинации и/или поднаборы. Специалисты в данной области техники должны понимать, как осуществлять и использовать раскрытые аспекты, варианты осуществления и/или конфигурации, после понимания настоящего раскрытия сущности. Настоящее раскрытие сущности, в различных аспектах, вариантах осуществления и/или конфигурациях, включает в себя предоставление устройств и процессов в отсутствие позиций, не проиллюстрированных и/или описанных в данном документе или в различных аспектах, вариантах осуществления и/или конфигурациях настоящего документа, в том числе отсутствие таких позиций, которые, возможно, использованы в предыдущих устройствах или процессах, например, для повышения производительности, достижения простоты и/или сокращения затрат на реализацию.
Вышеприведенное пояснение представлено для целей иллюстрации и пояснения. Оно не имеет намерение ограничивать раскрытие сущности формой или формами, раскрытыми в данном документе. В вышеприведенном подробном описании, например, различные признаки раскрытия сущности группируются в одном или более аспектов, вариантов осуществления и/или конфигураций для упрощения раскрытия сущности. Признаки аспектов, вариантов осуществления и/или конфигураций раскрытия сущности могут комбинироваться в альтернативных аспектах, вариантах осуществления и/или конфигурациях, отличных от аспектов, вариантов осуществления и/или конфигураций, поясненных выше. Этот способ раскрытия сущности не должен интерпретироваться как отражающий намерение того, что формула изобретения требует большего числа признаков, чем явно изложено в каждом пункте формулы изобретения. Наоборот, прилагаемая формула изобретения отражает то, что изобретаемые аспекты заключаются не во всех признаках одного вышеприведенного раскрытого аспекта, варианта осуществления и/или конфигурации. Таким образом, прилагаемая формула изобретения настоящим включается в это подробное описание, при этом каждый пункт формулы изобретения непосредственно служит в качестве отдельного предпочтительного варианта осуществления раскрытия сущности.
Кроме того, хотя описание включает в себя описание одного или более аспектов, вариантов осуществления и/или конфигураций, а также определенных варьирований и модификаций, другие варьирования, комбинации и модификации находятся в пределах объема раскрытия сущности, например, как должны знать и понимать специалисты в данной области техники, после понимания настоящего раскрытия сущности. Подразумевается получение прав, которые включают в себя альтернативные аспекты, варианты осуществления и/или конфигурации в соответствии с действующим законодательством, включающие в себя альтернативные, взаимозаменяемые и/или эквивалентные структуры, функции, диапазоны или этапы относительно структур, функций, диапазонов или этапов, заявленных в формуле изобретения, независимо от того, раскрываются или нет такие альтернативные, взаимозаменяемые и/или эквивалентные структуры, функции, диапазоны или этапы в данном документе, и без намерения публично обозначать любой патентоспособный предмет изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765065C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765040C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765021C2 |
| ТЕХНОЛОГИИ ДЛЯ ОБЕСПЕЧЕНИЯ СЕТЕВОЙ БЕЗОПАСНОСТИ ЧЕРЕЗ ДИНАМИЧЕСКИ ВЫДЕЛЯЕМЫЕ УЧЕТНЫЕ ЗАПИСИ | 2015 |
|
RU2691211C2 |
| Система и способ дозаправки спутников | 2008 |
|
RU2607912C2 |
| СИСТЕМЫ ДЛЯ ЗАХВАТА КЛИЕНТСКОГО КОСМИЧЕСКОГО АППАРАТА И СВЯЗАННЫЕ СПОСОБЫ | 2018 |
|
RU2761362C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ЗАЩИТЫ СЕТЕВЫХ УСТРОЙСТВ | 2015 |
|
RU2675055C2 |
| СИНХРОНИЗАЦИЯ СТРУКТУРИРОВАННОГО СОДЕРЖИМОГО ВЕБ-УЗЛОВ | 2007 |
|
RU2432608C2 |
| ЗАЩИТА СЕТЕВЫХ УСТРОЙСТВ ПОСРЕДСТВОМ МЕЖСЕТЕВОГО ЭКРАНА | 2016 |
|
RU2712815C1 |
| СПОСОБ И СИСТЕМА ИСПОЛЬЗОВАНИЯ ЛОКАЛЬНОГО ПОДДЕРЖИВАЕМОГО ХОСТ-УЗЛОМ КЭША И КРИПТОГРАФИЧЕСКИХ ХЭШ-ФУНКЦИЙ ДЛЯ ТОГО, ЧТОБЫ УМЕНЬШАТЬ СЕТЕВОЙ ТРАФИК | 2009 |
|
RU2475988C2 |
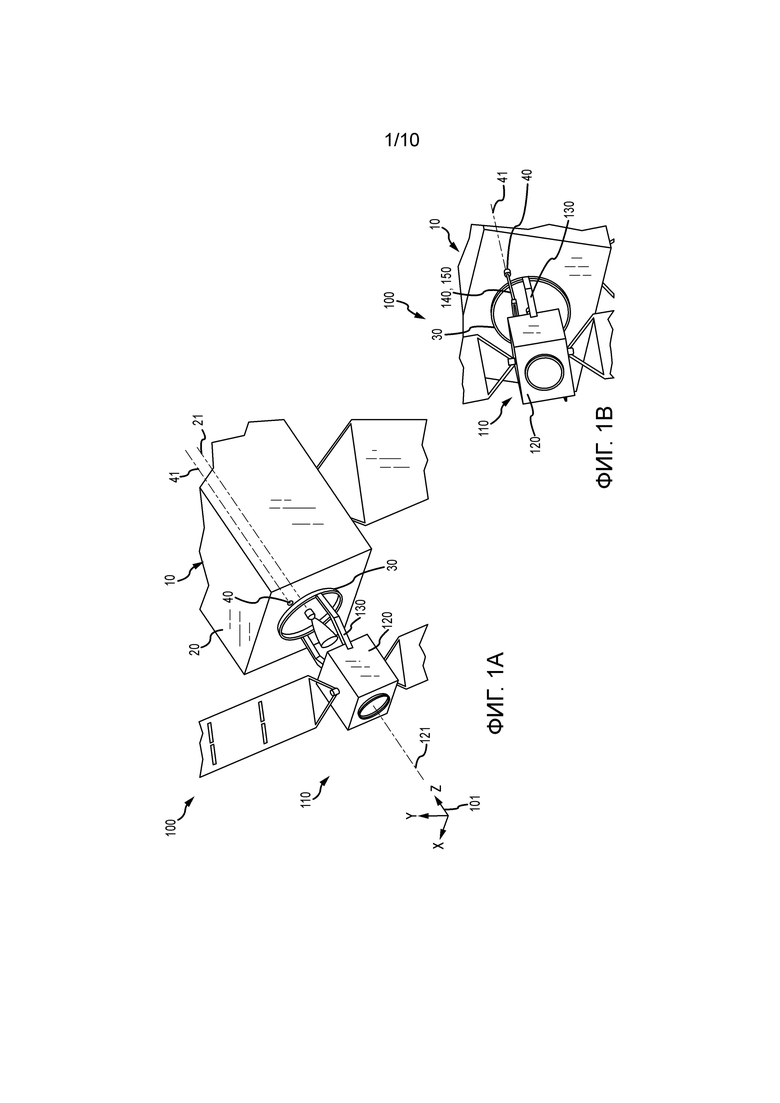
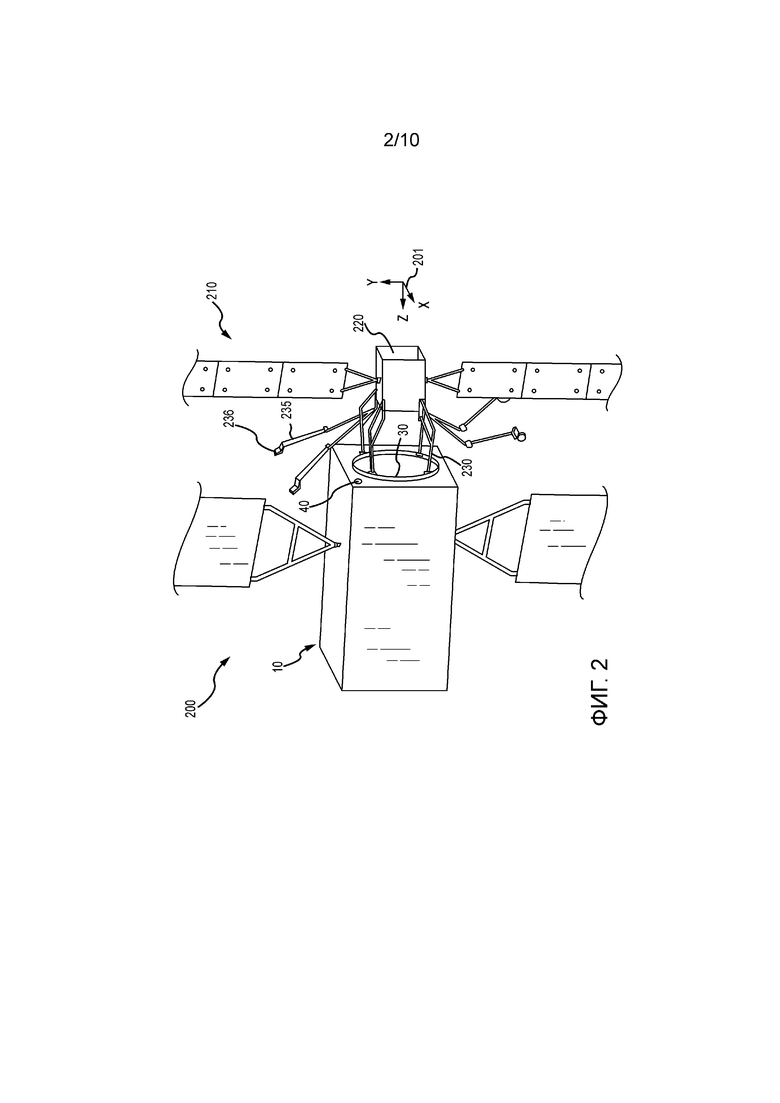
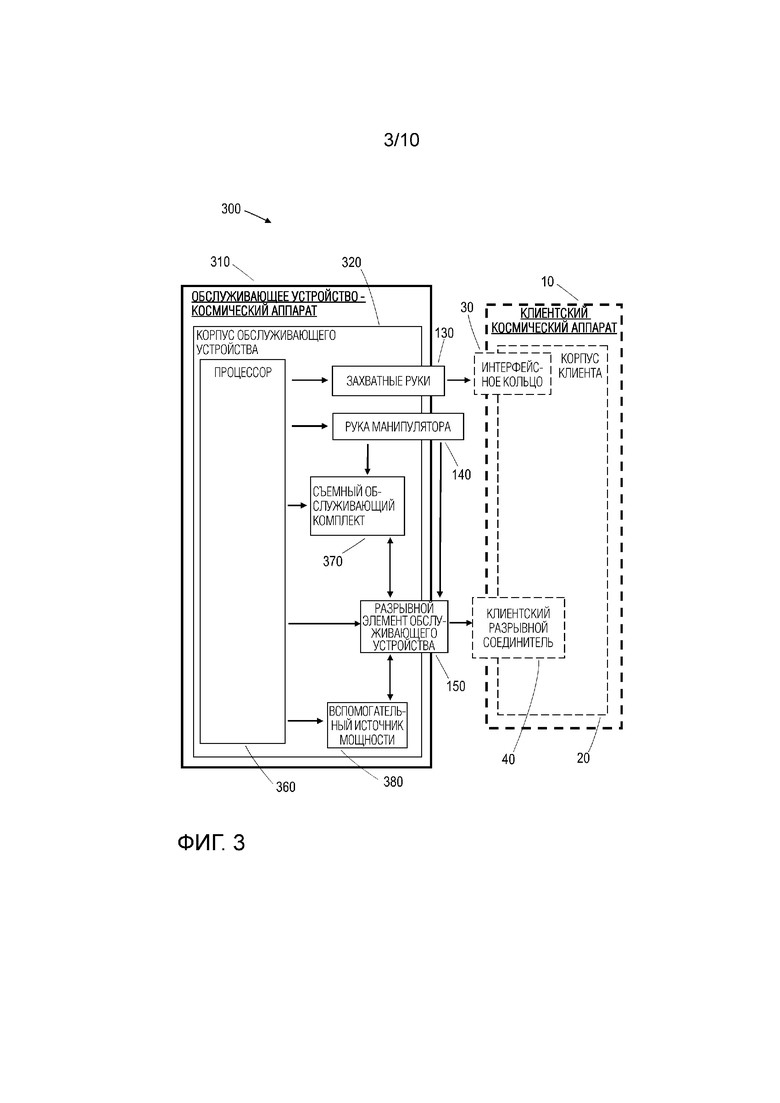
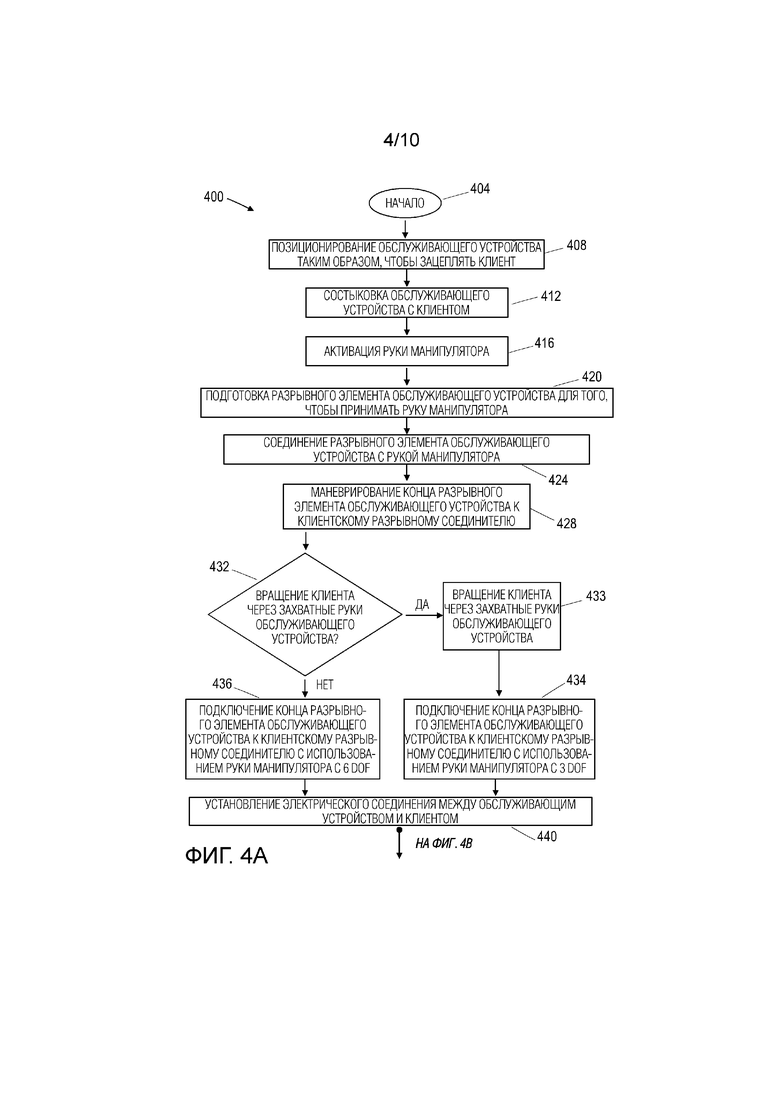
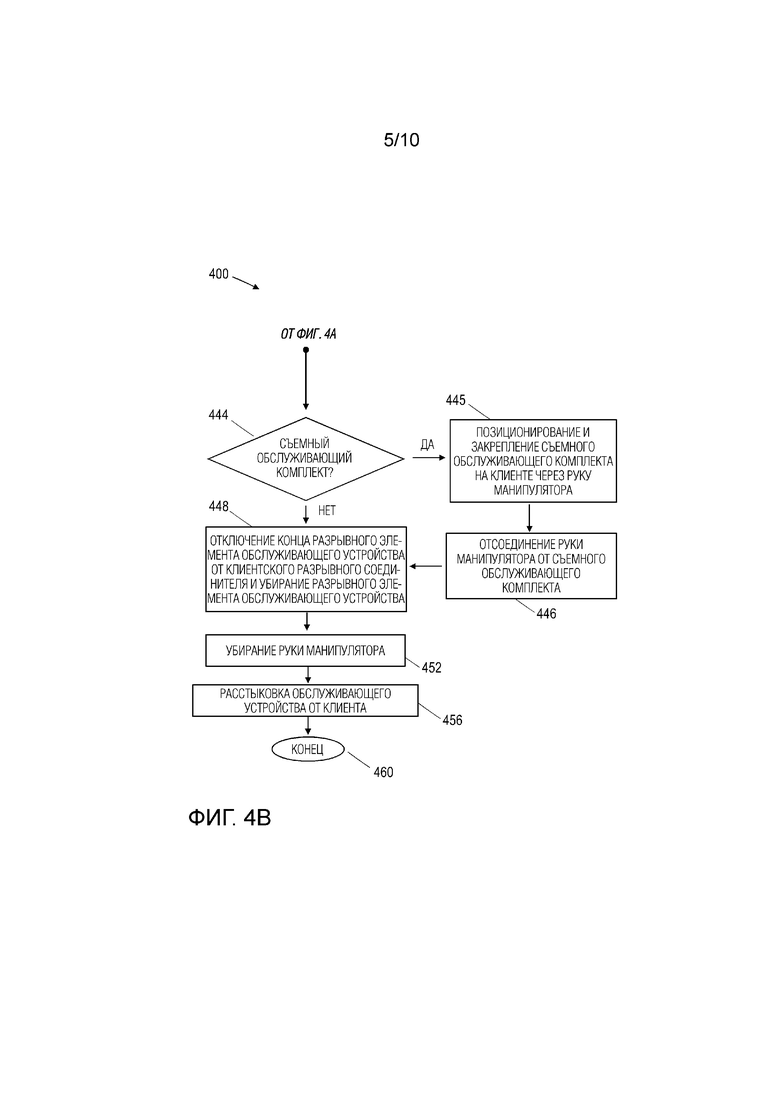
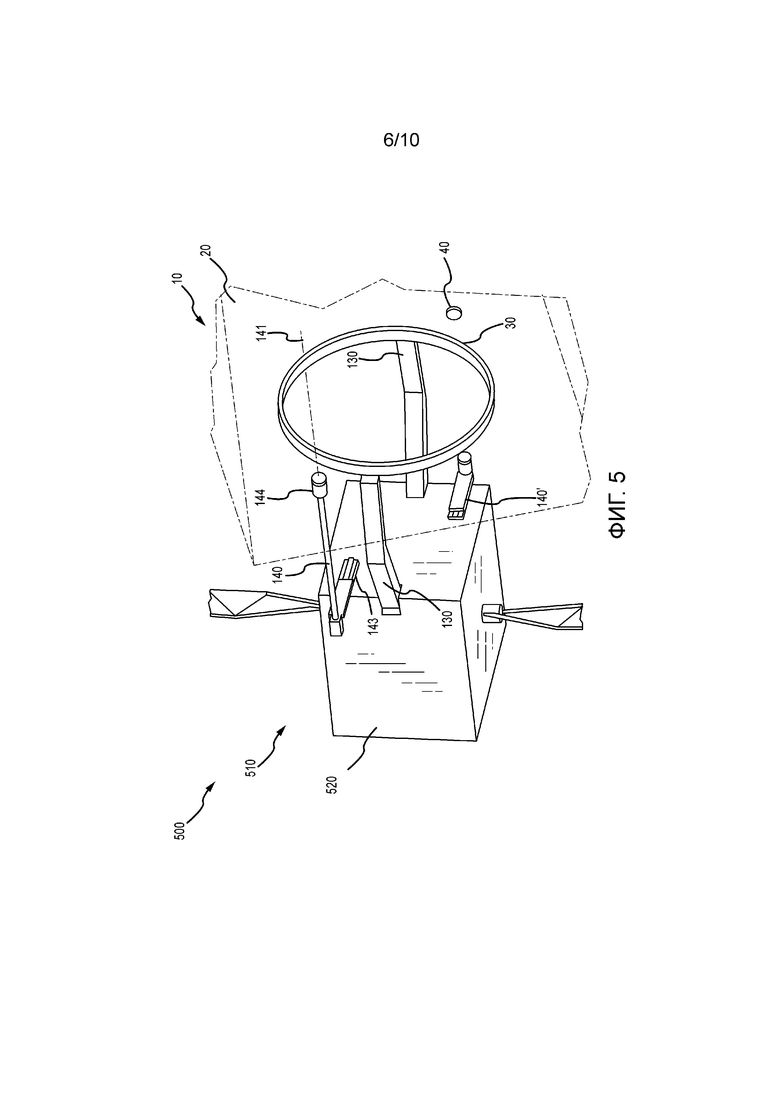
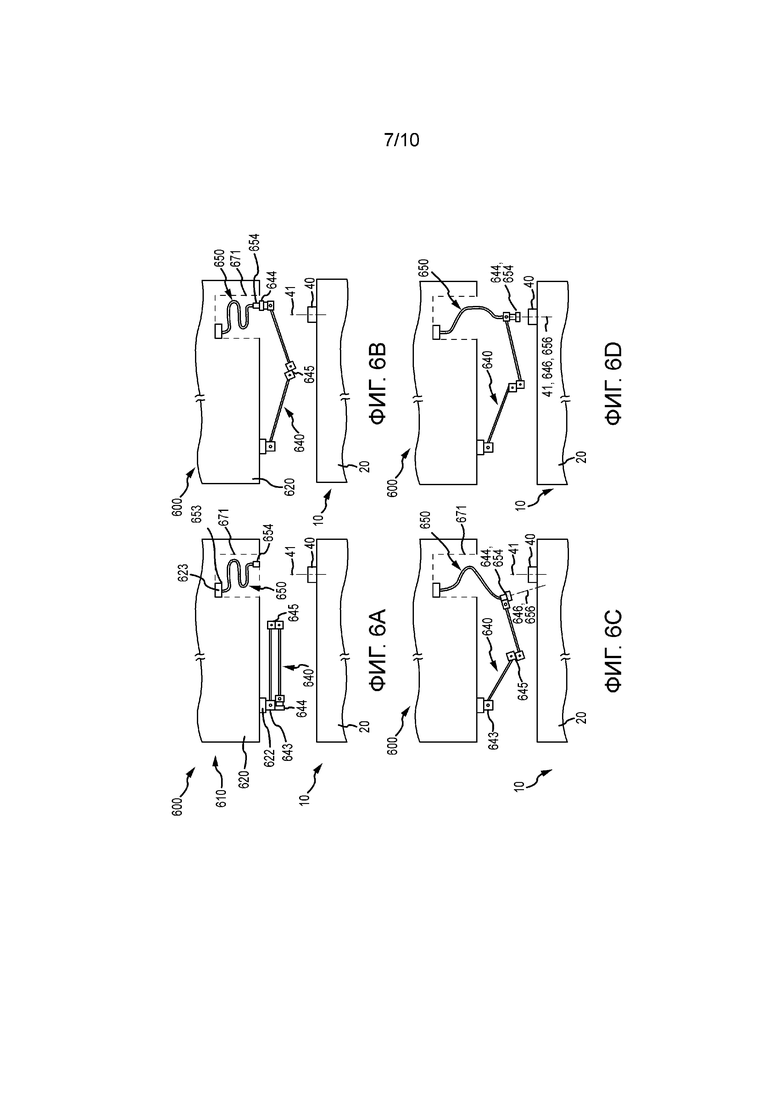
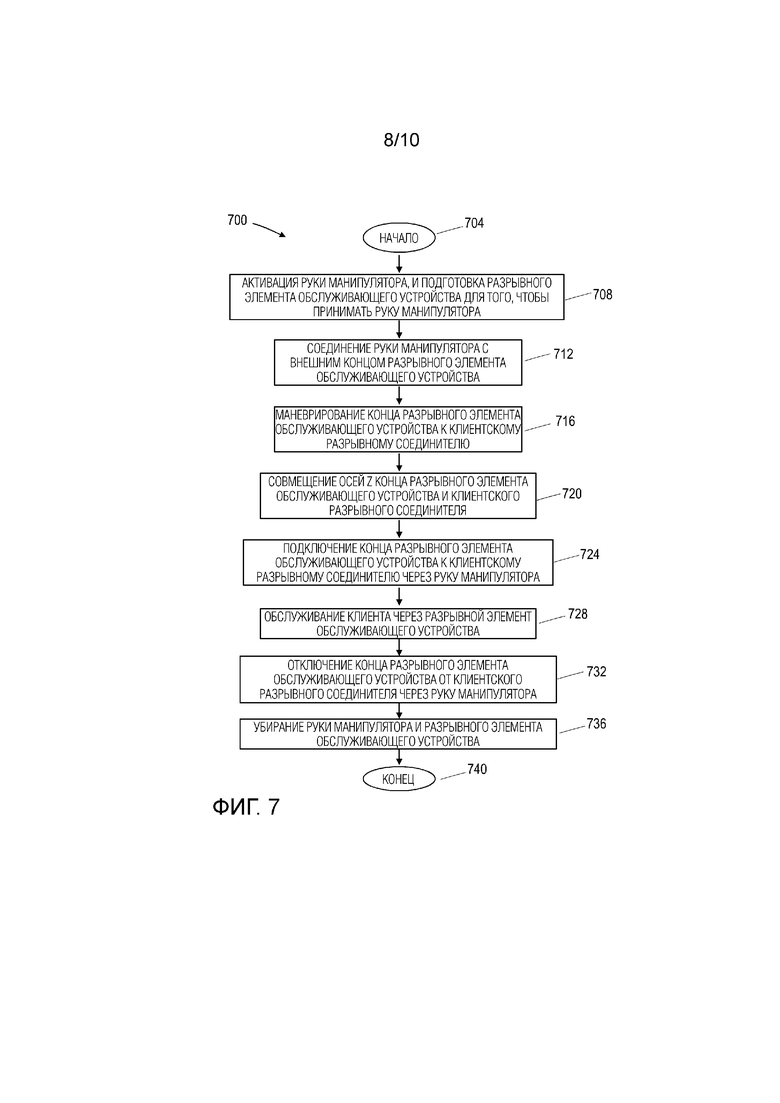
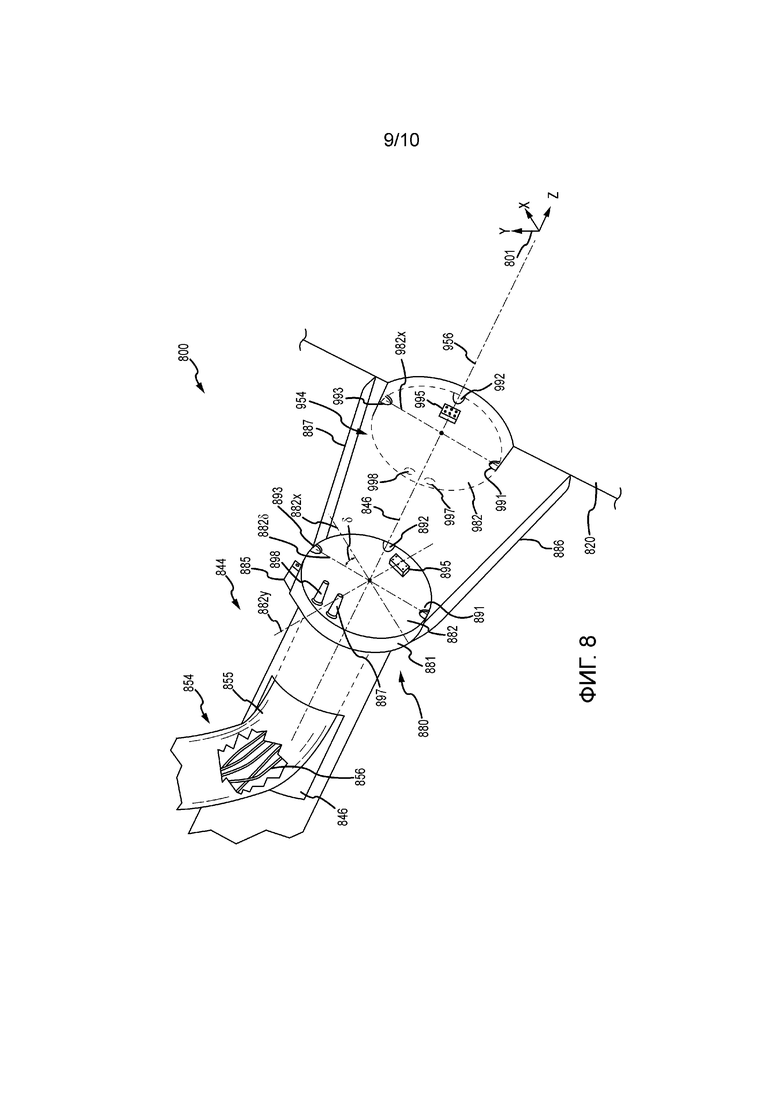
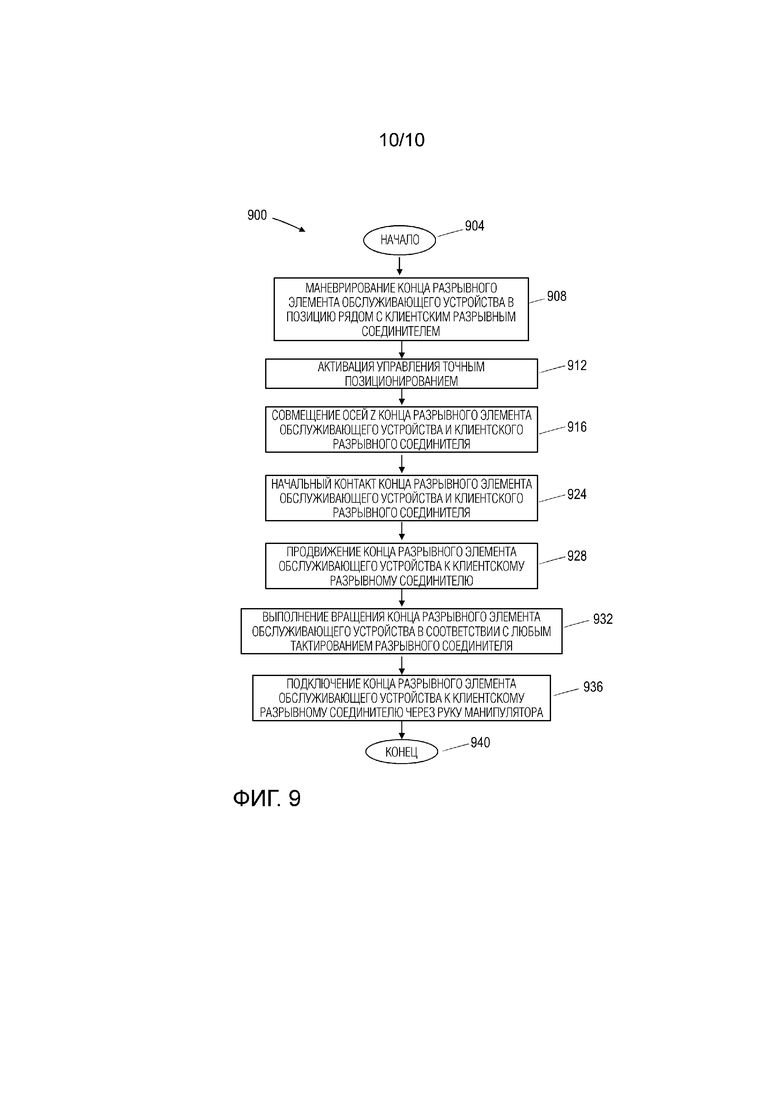
Группа изобретений относится к космической области техники, а именно к обслуживающим космическим аппаратам. Обслуживающая система содержит обслуживающий космический аппарат, набор захватных рук, разрывной элемент, манипулятор. Манипулятор обеспечивает маневрирование разрывного элемента для формирования электрического соединения между обслуживающим космическим аппаратом и разрывным соединителем обслуживаемого космического аппарата. Электрическое соединение используется для предоставления электрической мощности или обновления программного обеспечения. Достигается возможность надежного обслуживания широкого спектра космических аппаратов. 3 н. и 17 з.п. ф-лы, 14 ил.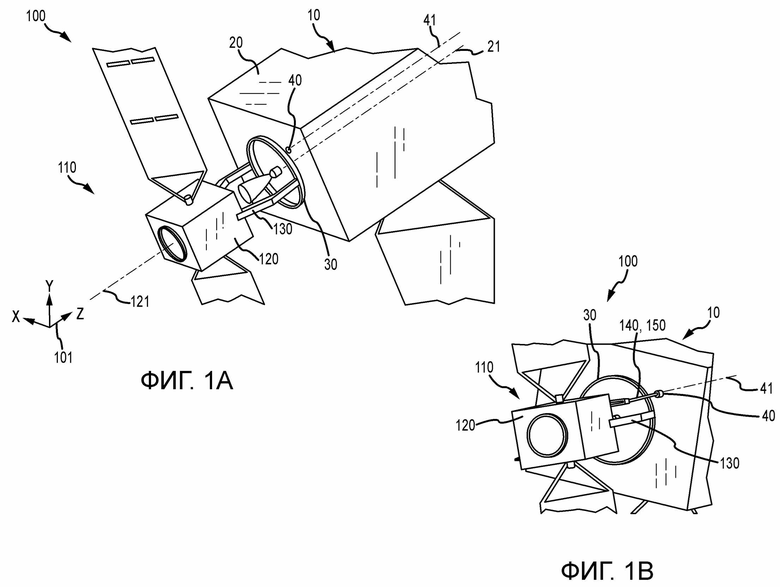
1. Обслуживающая система орбитального космического аппарата, содержащая:
обслуживающее устройство - космический аппарат, содержащее:
корпус обслуживающего устройства;
набор захватных рук, проходящих из корпуса и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат;
разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата;
руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, выполненным с возможностью прикрепления к, открепления от, и обеспечения маневрирования разрывного элемента обслуживающего устройства; и
процессор, функционирующий с возможностью управления рукой манипулятора;
при этом:
при функционировании обслуживающего устройства - космического аппарата на орбите, рука манипулятора выполнена с возможностью:
i) прикрепления к разрывному элементу обслуживающего устройства, и ii) обеспечения маневрирования разрывного элемента обслуживающего устройства для образования соединения между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем.
2. Система по п.1, в которой первый конец разрывного элемента обслуживающего устройства прикреплен к корпусу обслуживающего устройства в месте крепления разрывного элемента обслуживающего устройства, и первый конец руки манипулятора прикреплен к корпусу обслуживающего устройства в месте крепления руки манипулятора, причем место крепления разрывного элемента обслуживающего устройства отделено от места крепления разрывного элемента обслуживающего устройства.
3. Система по п.1, в которой концевой соединитель разрывного элемента обслуживающего устройства содержит круговую кромку, которая образует радиально концентричное соединение с продольной осью клиентского разрывного соединителя, причем круговая кромка охватывает электрическое соединение между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем.
4. Система по п.1, в которой, при функционировании обслуживающего устройства - космического аппарата на орбите, электрическая мощность передается из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через разрывной элемент обслуживающего устройства.
5. Система по п.1, в которой обслуживающее устройство - космический аппарат дополнительно содержит обслуживающий комплект, выполненный с возможностью прикрепляться к клиентскому разрывному соединителю.
6. Система по п.5, в которой обслуживающий комплект предоставляет электрическую мощность в клиентский орбитальный космический аппарат через клиентский разрывной соединитель.
7. Система по п.1, в которой набор захватных рук выполнен с возможностью зацеплять интерфейсное кольцо клиентского орбитального космического аппарата в выбираемой позиции тактирования интерфейсного кольца.
8. Система по п.1, в которой соединение, сформированное между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем, остается прочным после того, как рука манипулятора отсоединяется от разрывного элемента обслуживающего устройства.
9. Система по п.1, в которой разрывной элемент обслуживающего устройства содержит набор электрических кабелей, выполненных с возможностью передавать по меньшей мере одно из электрической мощности и электрических сигналов в клиентский орбитальный космический аппарат.
10. Система по п.1, в которой концевой соединитель разрывного элемента обслуживающего устройства соединяется по меньшей мере с одним датчиком, причем упомянутый по меньшей мере один датчик предоставляет данные датчиков в процессор, чтобы облегчать концевому соединителю разрывного элемента обслуживающего устройства формировать соединение с клиентским разрывным соединителем.
11. Система по п.10, в которой упомянутый по меньшей мере один датчик представляет собой микрокамеру.
12. Система по п.11, в которой концевой соединитель разрывного элемента обслуживающего устройства дополнительно соединяется с удлиняющей направляющей, причем удлиняющая направляющая формирует конусообразное удлинение из концевого соединителя разрывного элемента обслуживающего устройства, чтобы упрощать совмещение концевого соединителя разрывного элемента обслуживающего устройства с осью Z клиентского разрывного соединителя.
13. Обслуживающая система орбитального космического аппарата, содержащая:
обслуживающее устройство - космический аппарат, содержащее:
корпус обслуживающего устройства;
набор из двух или более захватных рук, проходящих из корпуса обслуживающего устройства и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат;
разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата;
руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, сопряженным с датчиком и выполненным с возможностью обеспечивать маневрирование разрывного элемента обслуживающего устройства;
вспомогательный источник мощности; и
процессор, функционирующий с возможностью управлять руками манипулятора;
при этом:
при функционировании обслуживающего устройства - космического аппарата на орбите,
датчик предоставляет данные датчиков в процессор, чтобы облегчать концевому соединителю разрывного элемента обслуживающего устройства формировать соединение с клиентским разрывным соединителем;
разрывной элемент обслуживающего устройства содержит набор электрических кабелей, выполненных с возможностью передавать по меньшей мере одно из электрической мощности и электрических сигналов в клиентский орбитальный космический аппарат;
вспомогательный источник мощности предоставляет электрическую мощность из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через разрывной элемент обслуживающего устройства; и
рука манипулятора выполнена с возможностью прикрепления к разрывному элементу обслуживающего устройства и обеспечения маневрирования разрывного элемента обслуживающего устройства, чтобы формировать соединение между концевым соединителем разрывного элемента обслуживающего устройства и клиентским разрывным соединителем.
14. Способ обслуживания орбитального космического аппарата, при этом способ содержит этапы, на которых:
- предоставляют обслуживающее устройство - космический аппарат, содержащее:
корпус обслуживающего устройства;
набор захватных рук, проходящих из корпуса обслуживающего устройства и функционирующих с возможностью зацеплять клиентский орбитальный космический аппарат;
разрывной элемент обслуживающего устройства с первым концом разрывного элемента обслуживающего устройства, прикрепленным к корпусу обслуживающего устройства, и вторым концом разрывного элемента обслуживающего устройства, сопряженным с концевым соединителем разрывного элемента обслуживающего устройства, причем концевой соединитель разрывного элемента обслуживающего устройства выполнен с возможностью формировать соединение с клиентским разрывным соединителем клиентского орбитального космического аппарата;
руку манипулятора с первым концом руки манипулятора, соединенным с корпусом обслуживающего устройства, и вторым концом руки манипулятора, выполненным с возможностью крепления к, открепления от, и обеспечения маневрирования разрывного элемента обслуживающего устройства; и
процессор, функционирующий с возможностью управлять рукой манипулятора;
- соединяют обслуживающее устройство - космический аппарат и клиентский орбитальный космический аппарат с использованием набора захватных рук;
- прикрепляют руку манипулятора к разрывному элементу обслуживающего устройства;
- управляют рукой манипулятора таким образом, чтобы позиционировать второй конец разрывного элемента обслуживающего устройства в позицию рядом с клиентским разрывным соединителем; и
- подключают концевой соединитель разрывного элемента обслуживающего устройства к клиентскому разрывному соединителю;
при этом:
- формируют электрическое соединение между обслуживающим космическим аппаратом и клиентским орбитальным космическим аппаратом.
15. Способ по п.14, дополнительно содержащий этап, на котором передают электрическую мощность из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через электрическое соединение.
16. Способ по п.14, дополнительно содержащий этап, на котором передают электрические сигналы из обслуживающего устройства - космического аппарата в клиентский орбитальный космический аппарат через электрическое соединение.
17. Способ по п.14, дополнительно содержащий этап, на котором вращают концевой соединитель разрывного элемента обслуживающего устройства в выбранную позицию тактирования клиентского разрывного соединителя.
18. Способ по п.14, дополнительно содержащий этап, на котором обрабатывают набор сигналов из датчика, смонтированного на разрывном элементе обслуживающего устройства, причем набор сигналов обеспечивает точное позиционирование второго конца разрывного элемента обслуживающего устройства в позицию рядом с клиентским разрывным соединителем.
19. Способ по п.14, в котором набор захватных рук зацепляет интерфейсное кольцо клиентского орбитального космического аппарата.
20. Способ по п.14, в котором первый конец разрывного элемента обслуживающего устройства прикреплен к корпусу обслуживающего устройства в месте крепления разрывного элемента обслуживающего устройства, и первый конец руки манипулятора прикреплен к корпусу обслуживающего устройства в месте крепления руки манипулятора, причем место крепления разрывного элемента обслуживающего устройства отделено от места крепления разрывного элемента обслуживающего устройства.
| WO 2016030890 A1, 03.03.2016 | |||
| КОСМИЧЕСКИЙ АППАРАТ ОБСЛУЖИВАНИЯ НА ОРБИТЕ АВТОМАТИЧЕСКОГО КОСМИЧЕСКОГО АППАРАТА И СПОСОБ СТЫКОВКИ КОСМИЧЕСКОГО АППАРАТА ОБСЛУЖИВАНИЯ С НЕИСПРАВНЫМ ВРАЩАЮЩИМСЯ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2601522C1 |
| 0 |
|
SU157142A1 | |
| КОСМИЧЕСКИЙ АППАРАТ-ЭВАКУАТОР | 2018 |
|
RU2686563C1 |
| US 6945500 B2, 20.09.2005. | |||
