Область техники
Настоящее изобретение относится к области техники грузоподъемных кранов, и, в частности, оно относится к безоператорному грузоподъемному крану с автоматическим устройством расцепления и зацепления и к способу его эксплуатации.
Уровень техники
По мере постепенного выполнения программы «Сделано в Китае 2025» шаг за шагом на всех больших металлургических предприятиях уже внедряется автоматизация цехов и интеллектуализация кранового оборудования. По мере развития разных технологий интеллектуализации грузоподъемных кранов их базовые технологии уже развились до «глубоководной зоны»; в случае разработки безоператорного литейного крана уже реализуются такие функции, как интеллектуальное управление, круиз-контроль, электронная стабилизация т. п., но в некоторых ключевых технологиях, в частности в таких ключевых технологиях, как интеллектуальное автоматическое зацепление, контроль расцепления и т. п., существуют недостатки. Они ограничиваются плохими рабочими условиями на площадке (высокой температурой, большим количеством пыли) и технологическим уровнем электронных датчиков, и литейные краны с автоматическим управлением, полученные на основе традиционного литейного крана, в частности, в отношении безопасности и надежности технологии автоматического зацепления и отцепления все еще характеризуются относительно большими рисками.
Существующие технологии автоматического зацепления характеризуются следующими основными недостатками:
1. В существующих однотипных грузоподъемных кранах подъемный механизм по большей части представляет собой гибкую систему, и раскачивание навесного устройства в процессе торможения движения грузоподъемного крана, неуравновешенность центра тяжести навесного устройства и другие факторы создают сравнительно большие помехи при зацеплении грузоподъемного крана с грузом,
и очень трудно осуществить точное зацепление, при этом, в частности, в автоматическом режиме результаты еще более неудовлетворительные;
2. Плохие условия окружающей среды на площадке (высокая температура, пыль и т.п.) сравнительно сильно влияют на точность сканирования существующих систем трехмерного сканирования (например, лазером), при этом их точность сканирования может достигать приблизительно ±30 м; в случае средних и малых литейных кранов очень трудно удовлетворить требования к автоматическому зацеплению, и их стоимость сравнительно высокая, а срок эксплуатации короткий;
3. В некоторых однотипных грузоподъемных кранах применяется полнопроходная жесткая рама, чтобы могло осуществляться автоматическое зацепление, но при этом габаритные размеры и собственный вес грузоподъемного крана сравнительно большие, а обработка, производство и установка сравнительно трудные.
Сущность изобретения
С учетом представленных выше технических проблем предложен безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления и способ его эксплуатации. Согласно настоящему изобретению в основном за счет совместного действия жесткой рамы, которой снабжена грузовая каретка, устройства с функцией автоматического расцепления и зацепления и наземной рамы безоператорный грузоподъемный кран может выполнять автоматический захват и отпускание груза, при этом обеспечивается более высокая надежность и безопасность. Далее представлены применяемые в настоящем изобретении технические средства.
Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления, который содержит жесткую направляющую рамообразную каретку, наземную вспомогательную раму и наземное устройство для подачи груза; указанная жесткая направляющая рамообразная каретка выполнена с возможностью поперечного перемещения вдоль мостовой фермы; указанная жесткая направляющая рамообразная каретка соединена с подъемным механизмом, не допускающим горизонтального перемещения в процессе подъема и опускания груза; указанный подъемный механизм на нижнем конце снабжен автоматическим устройством расцепления и зацепления; указанная наземная вспомогательная рама жестко соединена с поверхностью земли; указанное автоматическое устройство расцепления и зацепления содержит направляющие колеса; указанная направляющая рамообразная каретка в нижней части жестко соединена с первым направляющим рельсом, которому соответствуют направляющие колеса; указанная наземная вспомогательная рама снабжена вторым направляющим рельсом, которому соответствуют направляющие колеса.
Кроме того, указанный подъемный механизм содержит передаточный механизм, намоточный барабан, стальной трос и механизм подъема и опускания со шкивами; указанный передаточный механизм и намоточный барабан соединены друг с другом; указанный стальной трос намотан на указанный намоточный барабан; два конца стального троса соответственно проходят относительно разных механизмов подъема и опускания со шкивами и прочно закреплены с получением двух точек подвеса путем обвязывания.
Кроме того, подъемный механизм путем обвязывания стальными тросами образует 4 подъемные системы с несколькими точками подвеса n-кратного увеличения.
Кроме того, указанный механизм подъема и опускания со шкивами содержит по меньшей мере два неподвижных шкива и соответствующее им количество подвижных шкивов; два неподвижных шкива закреплены на внешней поверхности каретки; проходящий относительно механизма подъема и опускания со шкивами стальной трос концевой частью жестко соединен с балансиром подъемного механизма.
Кроме того, указанный передаточный механизм содержит последовательно соединенные электродвигатель, тормозной механизм и редуктор; указанный электродвигатель посредством передаточного вала и соединительной муфты для высокоскоростных валов соединен с указанным тормозным механизмом; указанный тормозной механизм посредством соединительной муфты тормозного механизма соединен с редуктором; указанный редуктор посредством соединительной муфты для низкоскоростных валов соединен с намоточным барабаном.
Кроме того, указанное устройство расцепления и зацепления содержит опорную конструкцию, шарнирно соединенную с подвижными шкивами; указанная опорная конструкция снабжена крюком и устройством открывания и закрывания крюка, связанным с ним и предназначенным для управления его открыванием и закрыванием; указанные направляющие колеса установлены на опорной конструкции.
Кроме того, первый направляющий рельс в области нижней части направляющей рамообразной каретки обеспечен опорой посредством расположенной снаружи него рамы; второй направляющий рельс обеспечен опорой посредством расположенной снаружи него наземной вспомогательной рамы.
Способ эксплуатации безоператорного грузоподъемного крана с автоматическим устройством расцепления и зацепления включает следующие этапы, на которых:
принимают команду перенести груз по воздуху и с помощью системы позиционирования перемещают безоператорный грузоподъемный кран в указанное место над наземной рамой;
автоматическое устройство расцепления и зацепления опускают в область наземной рамы и после опускания направляющих колес вдоль второго направляющего рельса до заданной высоты останавливают; задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления с переходом в режим ожидания после открывания крюка;
посредством устройства для подачи груза перемещают груз в область наземной вспомогательной рамы; посредством расположенного между ними устройства позиционирования обеспечивают точную остановку груза в указанном месте и его закрепление;
задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления для закрывания крюка с завершением закрывания крюка и завершением захватывания груза;
навесное устройство поднимают до области жесткой направляющей рамы безоператорного грузоподъемного крана и после подъема направляющих колес вдоль первого направляющего рельса до заданной высоты останавливают;
жесткую каретку перемещают вдоль мостовой фермы с перемещением груза в указанное место.
Согласно настоящему изобретению за счет совместного действия автоматического устройства расцепления и зацепления подъемного механизма, жесткой рамы каретки и наземной рамы безоператорный грузоподъемный кран может выполнять автоматический захват и отпускание груза, при этом вся система в процессе подъема и опускания навесного устройства не совершает горизонтального перемещения, и обеспечивается более высокая надежность и безопасность. В частности, обеспечивается безоператорная работа и автоматизация грузоподъемного крана для переноса по воздуху жидких металлов или других высокоопасных грузов. В то же время устройство характеризуется простой конструкцией, относительно небольшим собственным весом и широким диапазоном применения.
Описание прилагаемых графических материалов
Для более понятного описания технических решений согласно вариантам осуществления настоящего изобретения или аналогам, известным из уровня техники, ниже в простой форме представлены прилагаемые графические материалы, которые нужно применять в отношении вариантов осуществления или аналогов, известных из уровня техники, при этом совершенно очевидно, что описанные ниже прилагаемые графические материалы относятся к нескольким вариантам осуществления настоящего изобретения, и специалисты в данной области техники на основании этих прилагаемых графических материалов без приложения творческих усилий также могут получить другие прилагаемые графические материалы.
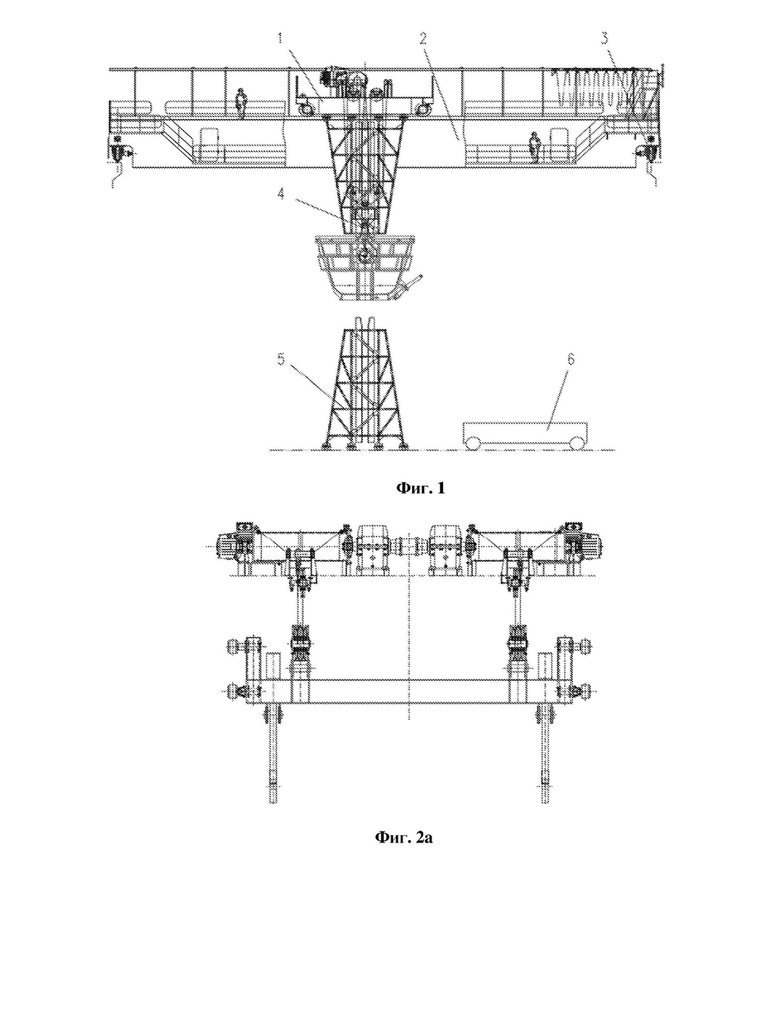
На фиг. 1 представлено схематическое изображение всей конструкции безоператорного грузоподъемного крана согласно настоящему изобретению.
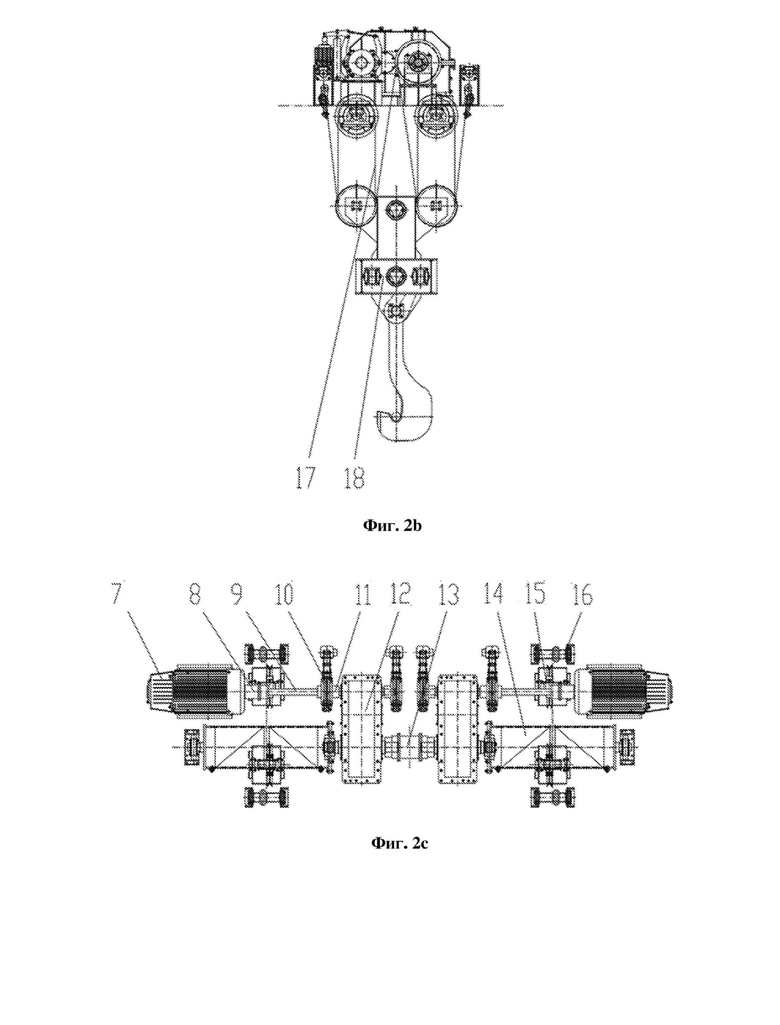
На фиг. 2 представлено схематическое изображение подъемного механизма грузоподъемного крана согласно настоящему изобретению, при этом на фигурах: (a) представлено изображение спереди, (b) представлено изображение сбоку, (c) представлено изображение сверху.
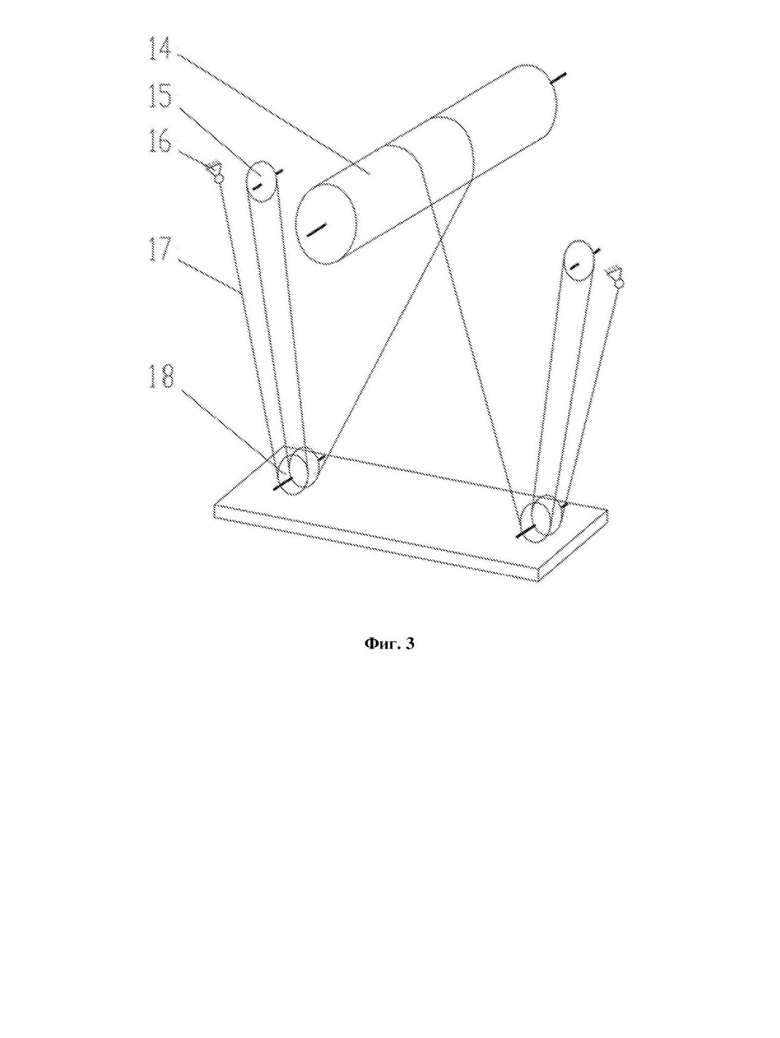
На фиг. 3 представлено схематическое изображение размещения стального троса подъемного механизма грузоподъемного крана согласно настоящему изобретению.
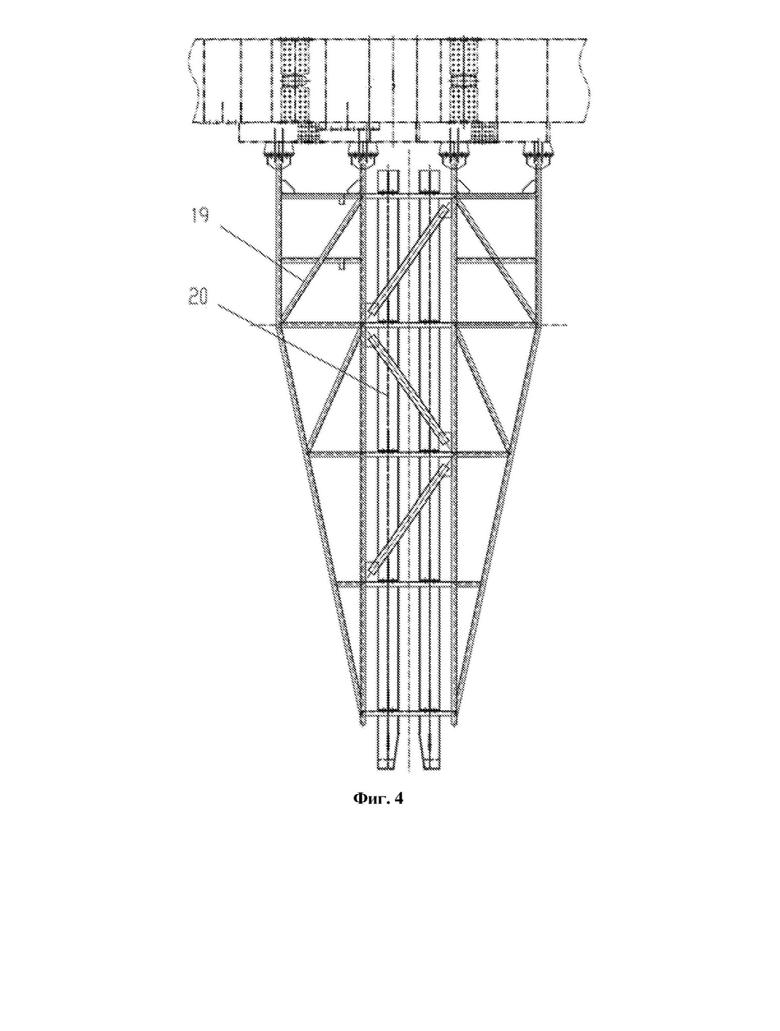
На фиг. 4 представлено схематическое изображение жесткой направляющей рамы согласно настоящему изобретению.
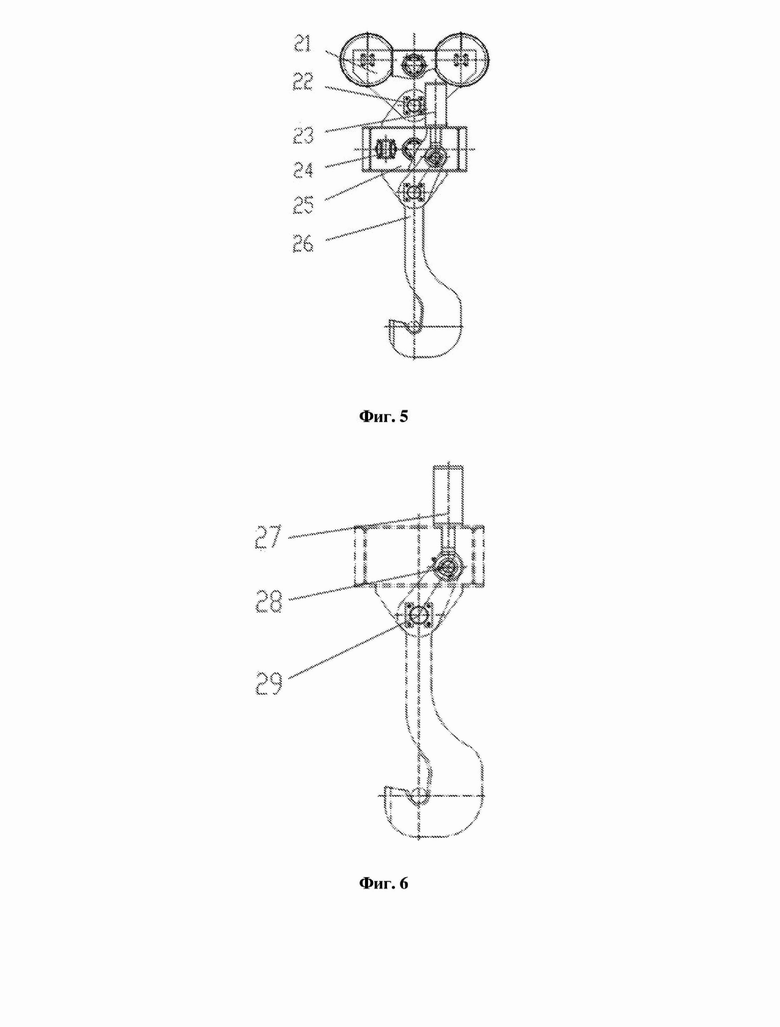
На фиг. 5 представлено схематическое изображение автоматического устройства расцепления и зацепления согласно настоящему изобретению.
На фиг. 6 представлено схематическое изображение устройства открывания и закрывания крюка в автоматическом устройстве расцепления и зацепления согласно настоящему изобретению.
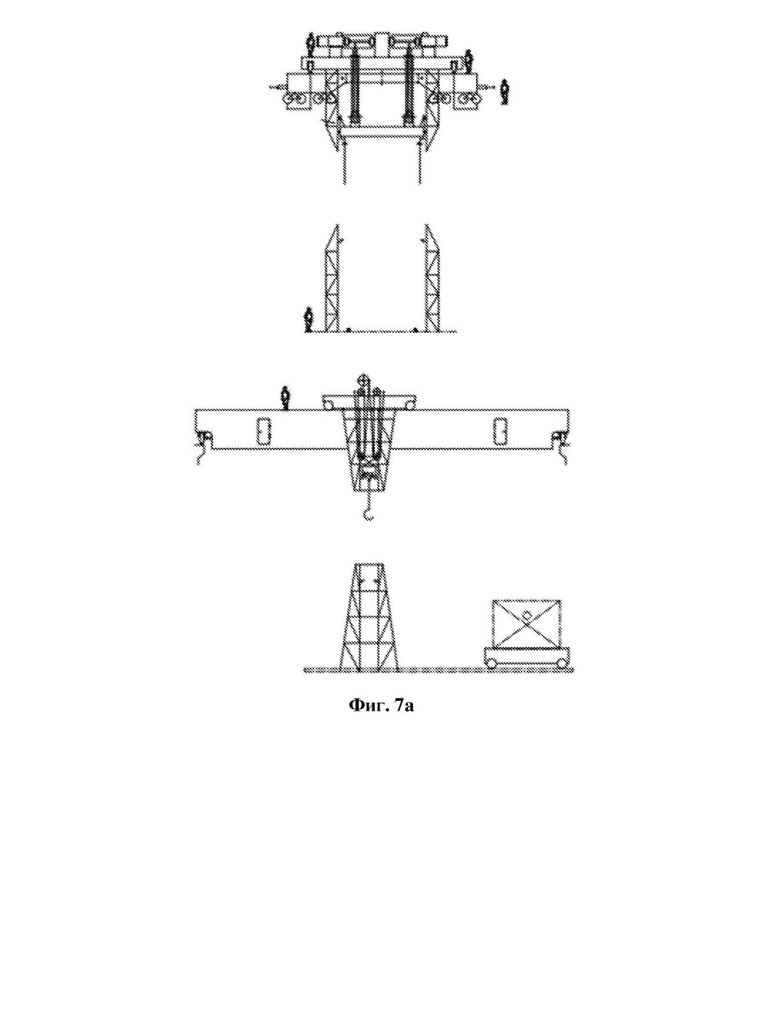
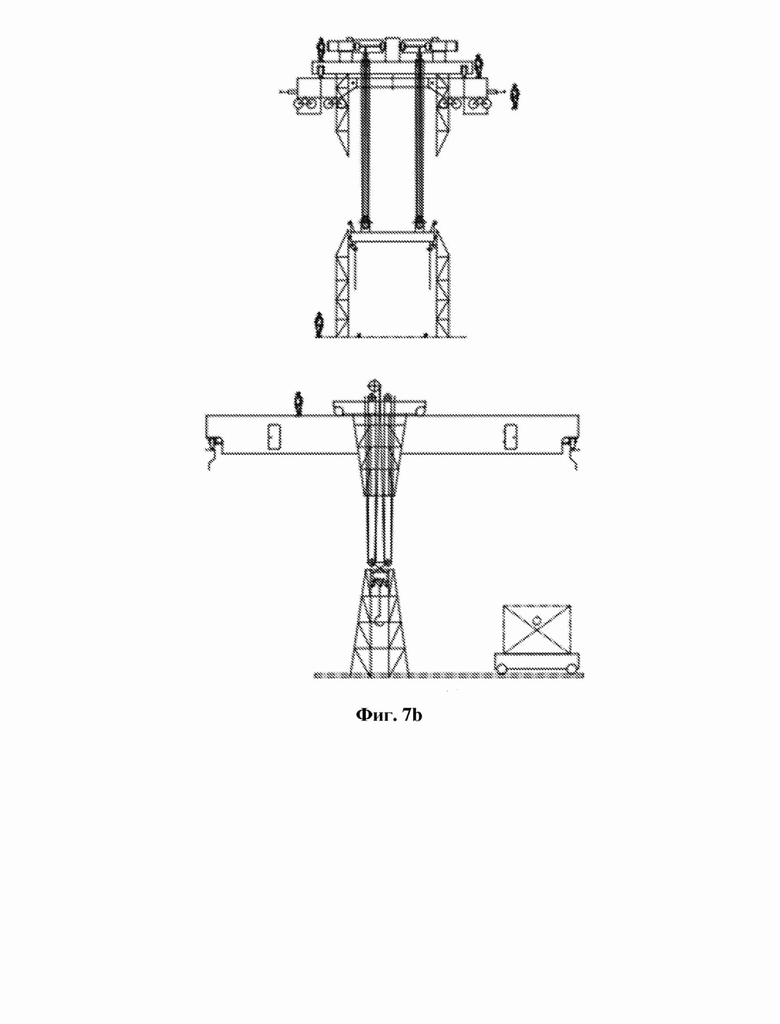
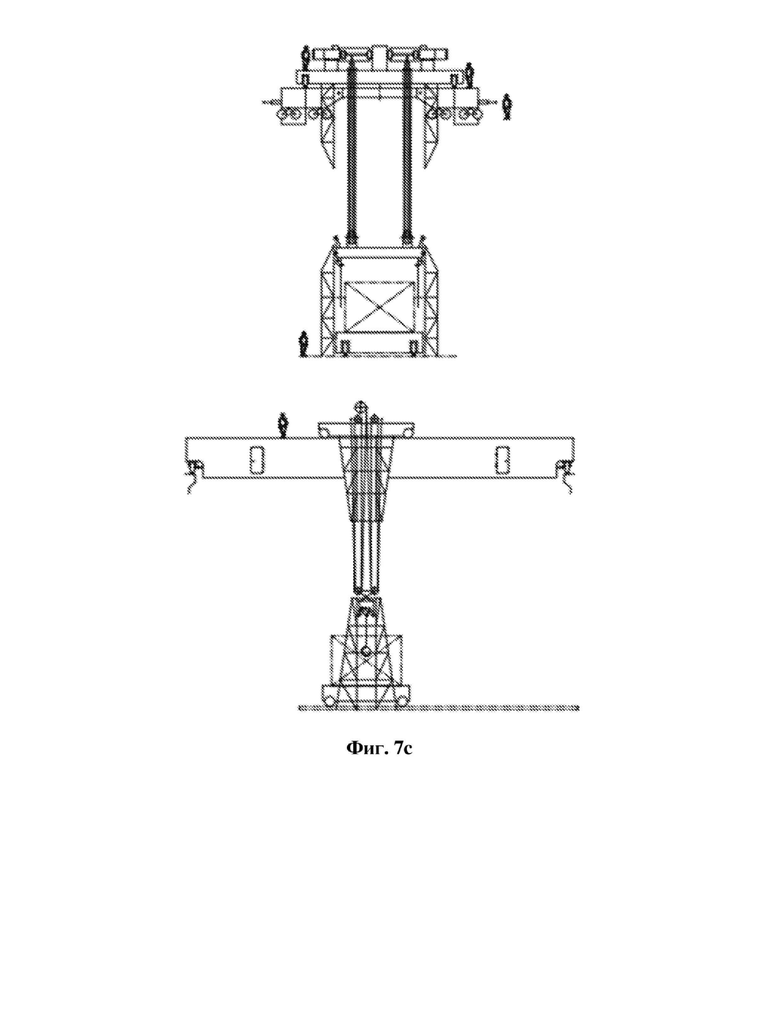
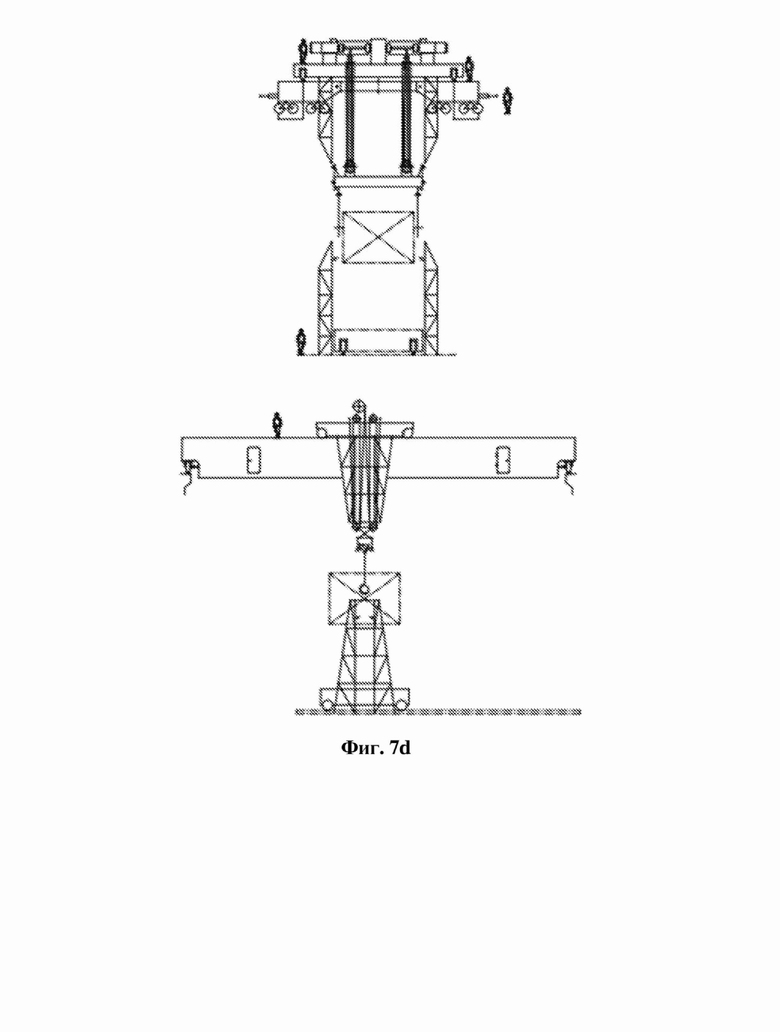
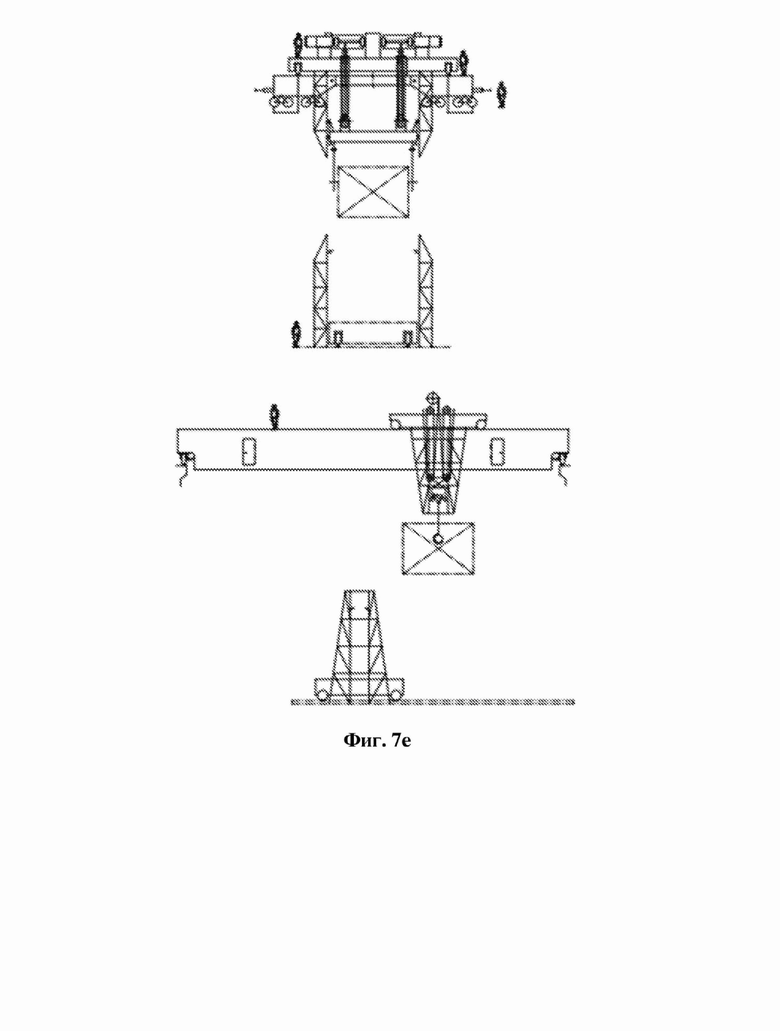
На фиг. 7 представлено схематическое изображение способа эксплуатации безоператорного грузоподъемного крана согласно настоящему изобретению, при этом (a) представлено размещение грузоподъемного крана на месте; (b) представлено размещение навесного устройства на месте; (c) представлено размещение груза на месте; (d) представлен подъем груза; (e) представлено перемещение груза.
На фигурах: 1 – жесткая направляющая рамообразная каретка; 2 – мостовая ферма; 3 – механизм перемещения грузоподъемного крана; 4 – механизм расцепления и зацепления; 5 – наземная вспомогательная рама; 6 – наземное устройство для подачи груза; 7 – электродвигатель; 8 – соединительная муфта для высокоскоростных валов; 9 – передаточный вал; 10 – тормозной механизм; 11 – соединительная муфта тормозного механизма; 12 – редуктор; 13 – соединительная муфта для низкоскоростных валов; 14 – намоточный барабан; 15 – неподвижный шкив; 16 – балансир; 17 – стальной трос; 18 – автоматическое устройство расцепления и зацепления; 19 – рама; 20 – первый направляющий рельс; 21 – подвижный шкив; 22 – ось I; 23 – устройство открывания и закрывания крюка; 24 – направляющее колесо; 25 – траверса; 26 – крюк; 27 – источник движущей силы; 28 – ось II; 29 – ось III.
Конкретные варианты осуществления
Чтобы цели, технические решения и преимущества в вариантах осуществления настоящего изобретения стали более понятными, ниже технические решения в вариантах осуществления настоящего изобретения понятно и основательно описаны со ссылкой на прилагаемые графические материалы, рассматриваемые в совокупности с вариантами осуществления настоящего изобретения; разумеется, описанные варианты осуществления являются некоторыми вариантами осуществления настоящего изобретения, а не всеми вариантами осуществления. Все другие варианты осуществления, основанные на вариантах осуществления настоящего изобретения и полученные специалистами в данной области техники без каких-либо творческих усилий, попадают в рамки объема защиты настоящего изобретения.
Как показано на фиг. 1, в этом варианте осуществления представлен безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления, содержащий жесткую направляющую рамообразную каретку 1, наземную вспомогательную раму 5 и наземное устройство 6 для подачи груза; в мостовой ферме 2 в качестве основной балки выбрана коробчатая балка со смещенными рельсами; в механизме 3 перемещения грузоподъемного крана установлены горизонтальные направляющие ролики; указанная жесткая направляющая рамообразная каретка выполнена с возможностью поперечного перемещения вдоль мостовой фермы 2; указанная жесткая направляющая рамообразная каретка соединена с подъемным механизмом, не допускающим горизонтального перемещения в процессе подъема и опускания груза; указанный подъемный механизм на нижнем конце снабжен механизмом 4 расцепления и зацепления; указанная наземная вспомогательная рама жестко соединена с поверхностью земли; указанный механизм расцепления и зацепления содержит направляющие колеса 24; указанная направляющая рамообразная каретка в нижней части жестко соединена с первым направляющим рельсом, которому соответствуют направляющие колеса; указанная наземная вспомогательная рама снабжена вторым направляющим рельсом, которому соответствуют направляющие колеса. Указанная наземная вспомогательная рама 5 предназначена для дополнительной фиксации, когда грузоподъемный кран переносит по воздуху наземный груз; указанное наземное устройство 6 для подачи груза может представлять собой электрический вагон-платформу на рельсовом ходу, каретку AGV и т.п. и может перемещать груз горизонтально относительно поверхности земли в указанное место.
Как показано на фиг. 3, указанный подъемный механизм содержит передаточный механизм, намоточный барабан, стальной трос и механизмы подъема и опускания со шкивами; указанный передаточный механизм и намоточный барабан соединены друг с другом; указанный стальной трос 17 намотан на указанный намоточный барабан; два конца стального троса соответственно проходят относительно разных механизмов подъема и опускания со шкивами и прочно закреплены с получением двух точек подвеса путем обвязывания. Из фиг. 3 можно понять, что два стальных троса 17 от намоточного барабана 14 непосредственно проходят вниз и соответственно проходят относительно соответствующих подвижных шкивов 21 над автоматическим устройством 18 расцепления и зацепления, потом обратно к неподвижным шкивам 15 и затем проходят непосредственно вниз относительно подвижных шкивов 21 с окончательным соединением в области балансира 16. Две системы обвязывания стальными тросами, образующие точки подвеса, выполнены симметричными, что может обеспечивать отсутствие горизонтального перемещения автоматического устройства 4 расцепления и зацепления в процессе подъема и опускания.
Подъемный механизм путем обвязывания стальными тросами образует 4 подъемные системы с несколькими точками подвеса n-кратного увеличения.
Указанный механизм подъема и опускания со шкивами содержит по меньшей мере два неподвижных шкива 15 и соответствующее им количество подвижных шкивов 21; два неподвижных шкива закреплены на внешней поверхности каретки; проходящий относительно механизма подъема и опускания со шкивами стальной трос концевой частью жестко соединен с балансиром 16 подъемного механизма.
Как показано на фиг. 2(a), (b) и (c), указанный передаточный механизм содержит последовательно соединенные электродвигатель 7, тормозной механизм 10 и редуктор 12; указанный электродвигатель посредством передаточного вала 9 и соединительной муфты 8 для высокоскоростных валов соединен с указанным тормозным механизмом; указанный тормозной механизм посредством соединительной муфты 11 тормозного механизма соединен с редуктором; указанный редуктор посредством соединительной муфты 13 для низкоскоростных валов соединен с намоточным барабаном.
Как показано на фиг. 5, указанное устройство расцепления и зацепления содержит опорную конструкцию, шарнирно соединенную с подвижными шкивами; указанная опорная конструкция снабжена крюком 26 и устройством 23 открывания и закрывания крюка, связанным с ним и предназначенным для управления его открыванием и закрыванием; указанные направляющие колеса установлены на опорной конструкции. Указанное устройство расцепления и зацепления представляет собой автоматическое устройство 18 расцепления и зацепления, которое может автоматически выполнять функцию расцепления или зацепления; как показано на фиг. 6, каждые два подвижных шкива образуют узел подвижных шкивов, который посредством оси I 22 шарнирно соединен с траверсой 25; на траверсе 25 установлен источник 27 движущей силы, который посредством оси II 28 соединен с крюком 26; крюк 26 посредством оси III 29 соединен с траверсой 25.
Наземная вспомогательная рама жестко соединена с поверхностью земли в производственном помещении, жестко соединена с навесным устройством посредством направляющих колес и направляющего рельса и может обеспечивать то, что в процессе захвата груза или отпускания груза навесным устройством навесное устройство не раскачивается и не совершает горизонтальных перемещений; наличие устройства для подачи груза позволяет осуществлять горизонтальное перемещение груза и точно доставлять груз в указанное место расположения наземной рамы. Между ней и устройством для подачи груза предусмотрено устройство позиционирования, которое может обеспечивать то, что устройство для подачи груза при перемещении груза остановится в указанном месте. В этом варианте осуществления первый направляющий рельс и второй направляющий рельс имеют одинаковую конструкцию и друг от друга отличаются только способом и местом установки. Устройство позиционирования применяется в аналогах, известных из уровня техники, при этом применяется кодирующее устройство или оптический датчик; когда кодирующее устройство или оптический датчик обнаруживают сигнал, то посредством электронной системы управления управляют устройством для подачи груза для его остановки.
Как показано на фиг. 4, первый направляющий рельс в области нижней части направляющей рамообразной каретки обеспечен опорой посредством расположенной снаружи него рамы 19; второй направляющий рельс обеспечен опорой посредством расположенной снаружи него наземной вспомогательной рамы.
Как показано на фиг. 7(a)–(e), способ эксплуатации безоператорного грузоподъемного крана с автоматическим устройством расцепления и зацепления включает следующие этапы, на которых:
принимают команду перенести груз по воздуху и с помощью системы позиционирования перемещают безоператорный грузоподъемный кран в указанное место над наземной рамой;
автоматическое устройство 18 расцепления и зацепления опускают в область наземной рамы и после опускания направляющих колес вдоль второго направляющего рельса до заданной высоты останавливают; задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления с переходом в режим ожидания после открывания крюка;
посредством устройства для подачи груза перемещают груз в область наземной вспомогательной рамы; посредством расположенного между ними устройства позиционирования обеспечивают точную остановку груза в указанном месте и его закрепление;
задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления для закрывания крюка с завершением закрывания крюка и завершением захватывания груза;
навесное устройство поднимают до области жесткой направляющей рамы безоператорного грузоподъемного крана и после подъема направляющих колес вдоль первого направляющего рельса до заданной высоты останавливают;
жесткую каретку перемещают вдоль мостовой фермы с перемещением груза в указанное место.
Наконец, следует отметить следующее: все представленные выше варианты осуществления предназначены исключительно для объяснения технических решений согласно настоящему изобретению, а не для его ограничения; хотя настоящее изобретение было подробно описано посредством рассмотренных выше вариантов осуществления, специалистам в данной области техники должно быть понятно, что в технические решения, представленные с помощью рассмотренных выше вариантов осуществления, они все же могут вносить изменения или же выполнять эквивалентные замены в отношении части или всех технических признаков, представленных в них; однако эти изменения или замены вовсе не означают, что суть соответствующих технических решений выходит за пределы объема технических решений во всех вариантах осуществления настоящего изобретения.
Изобретение относится к мостовым кранам. Кран содержит жесткую направляющую рамообразную каретку (1), наземную вспомогательную раму (5) и наземное устройство (6) для подачи груза. Жесткая направляющая рамообразная каретка (1) выполнена с возможностью поперечного перемещения вдоль мостовой фермы (2) и соединена с подъемным механизмом, не допускающим горизонтального перемещения в процессе подъема и опускания груза. Подъемный механизм на нижнем конце снабжен автоматическим устройством (18) расцепления и зацепления; наземная вспомогательная рама (5) жестко соединена с поверхностью земли; автоматическое устройство (18) расцепления и зацепления содержит направляющие колеса (24). Жесткая направляющая рамообразная каретка (1) в нижней части жестко соединена с первым направляющим рельсом (20), которому соответствуют направляющие колеса (24). Наземная вспомогательная рама (5) снабжена вторым направляющим рельсом, которому соответствуют направляющие колеса (24). Достигается выполнение автоматического захвата и отпускания груза и обеспечивается более высокая надежность и безопасность. 2 н. и 6 з.п. ф-лы, 13 ил.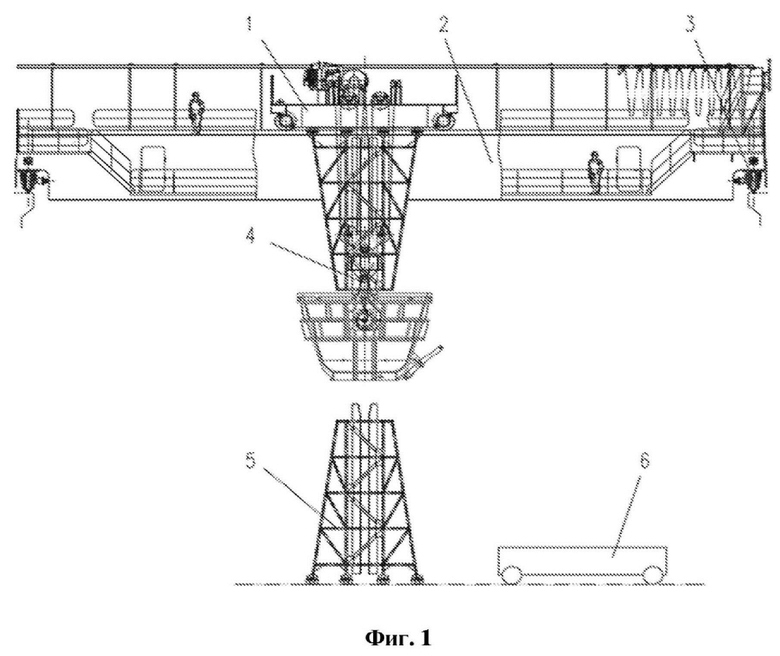
1. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления, отличающийся тем, что содержит жесткую направляющую рамообразную каретку, наземную вспомогательную раму и наземное устройство для подачи груза; указанная жесткая направляющая рамообразная каретка выполнена с возможностью поперечного перемещения вдоль мостовой фермы; указанная жесткая направляющая рамообразная каретка соединена с подъемным механизмом, не допускающим горизонтального перемещения в процессе подъема и опускания груза; указанный подъемный механизм на нижнем конце снабжен автоматическим устройством расцепления и зацепления; указанная наземная вспомогательная рама жестко соединена с поверхностью земли; указанное автоматическое устройство расцепления и зацепления содержит направляющие колеса; указанная направляющая рамообразная каретка в нижней части жестко соединена с первым направляющим рельсом, которому соответствуют направляющие колеса; указанная наземная вспомогательная рама снабжена вторым направляющим рельсом, которому соответствуют направляющие колеса.
2. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 1, отличающийся тем, что указанный подъемный механизм содержит передаточный механизм, намоточный барабан, стальной трос и механизм подъема и опускания со шкивами; указанный передаточный механизм и намоточный барабан соединены друг с другом; указанный стальной трос намотан на указанный намоточный барабан; два конца стального троса соответственно проходят относительно разных механизмов подъема и опускания со шкивами и прочно закреплены с получением двух точек подвеса путем обвязывания.
3. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 2, отличающийся тем, что подъемный механизм путем обвязывания стальными тросами образует 4 подъемные системы с несколькими точками подвеса n-кратного увеличения.
4. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 2, отличающийся тем, что указанный механизм подъема и опускания со шкивами содержит по меньшей мере два неподвижных шкива и соответствующее им количество подвижных шкивов; два неподвижных шкива закреплены на внешней поверхности каретки; проходящий относительно механизма подъема и опускания со шкивами стальной трос концевой частью жестко соединен с балансиром подъемного механизма.
5. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 2, отличающийся тем, что указанный передаточный механизм содержит последовательно соединенные электродвигатель, тормозной механизм и редуктор; указанный электродвигатель посредством передаточного вала и соединительной муфты для высокоскоростных валов соединен с указанным тормозным механизмом; указанный тормозной механизм посредством соединительной муфты тормозного механизма соединен с редуктором; указанный редуктор посредством соединительной муфты для низкоскоростных валов соединен с намоточным барабаном.
6. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 4, отличающийся тем, что указанное автоматическое устройство расцепления и зацепления содержит опорную конструкцию, шарнирно соединенную с подвижными шкивами; указанная опорная конструкция снабжена крюком и устройством открывания и закрывания крюка, связанным с ним и предназначенным для управления его открыванием и закрыванием; указанные направляющие колеса установлены на опорной конструкции.
7. Безоператорный грузоподъемный кран с автоматическим устройством расцепления и зацепления по п. 1, отличающийся тем, что первый направляющий рельс в области нижней части направляющей рамообразной каретки обеспечен опорой посредством расположенной снаружи него рамы; второй направляющий рельс обеспечен опорой посредством расположенной снаружи него наземной вспомогательной рамы.
8. Способ эксплуатации безоператорного грузоподъемного крана с автоматическим устройством расцепления и зацепления по любому из пп. 1–7, отличающийся тем, что включает следующие этапы, на которых:
принимают команду перенести груз по воздуху и с помощью системы позиционирования перемещают безоператорный грузоподъемный кран в указанное место над наземной рамой;
автоматическое устройство расцепления и зацепления опускают в область наземной рамы и после опускания направляющих колес вдоль второго направляющего рельса до заданной высоты останавливают; задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления с переходом в режим ожидания после открывания крюка;
посредством устройства для подачи груза перемещают груз в область наземной вспомогательной рамы; посредством расположенного между ними устройства позиционирования обеспечивают точную остановку груза в указанном месте и его закрепление;
задействуют механизм открывания и закрывания на автоматическом устройстве расцепления и зацепления для закрывания крюка с завершением закрывания крюка и завершением захватывания груза;
навесное устройство поднимают до области жесткой направляющей рамы безоператорного грузоподъемного крана и после подъема направляющих колес вдоль первого направляющего рельса до заданной высоты останавливают;
жесткую каретку перемещают вдоль мостовой фермы с перемещением груза в указанное место.
| CN 101214906 A, 09.07.2008 | |||
| CN 105502153 A, 20.04.2016 | |||
| 0 |
|
SU165234A1 | |
| JP 2019112184 A, 11.07.2019. | |||
