Изобретение относится к области аналого-вычислительной техники и может быть использовано в тренажерах для обучения водителей гусеничных машин и исследовательских стендах.. Известно устройство для моделирования прямолинейного движения автомобиля в тренажерах, содержащее блок моделирования, выход которого подклю чен ко входу блока моделирования, трансмиссии, другой вход которого подключен к датчику нагрузки fl. Недостатком этого устройства явля ется то, что оно моделирует повороты и связанные о ними воздействия, влия ющие на дина14ику движения машины. Наиболее близким техническим реше нием к предлагаемому является устрой ство, содержащее последовательно сое диненные блок моделирования двигателя, блок моделирования трансмиссии, выход которого соединен с первым вхо дом блока моделирования гусеничного движителя, а его второй вход соединен с датчиком вида грунта 12. Недостатком этого устройства явля ется низкая точность моделирования поворотов и влияния их на динамику движения, так как в данном устройстве не учитывается кривизна траектории, фактически получаемая при выполнении поворотов, которая определяется разностью скоростей гусениц, а не углом поворота органов управления поворота. Кроме того, при определении величин. сопротивления повороту не учитывается коэффициент сопротивления грунта повороту и коэффициенту сцепления сугеницы с грунтом, определяемые видом грунта, а учитывается только величина сопротивления грунта прямолинейному движению, а также в устройстве не моделируется явлениерекуперации мощности при повороте. Цель изобретения - повышение точности моделирования динамики гусеничных машин. Поставленная цель достигается тем, что- в устройство, содержащее блок моделирования двигателя, выход которого соединен со входом блока моделирования трансмиссии, пе-рвый бло.к моделирования гусеничного движителя, первый и второй входы которого соединены соответственно с выходом блока моделирования трансмиссии и с первым выходом датчика вида грунта, первый функциональный преобразователь, выход которого подключен к первому входу
первого сумматора, дополнительно введены инверторы, второй функциональный преобразователь, блок задания нел-инейности, второй сумматор и второй блок моделирования гусеничного движителя, входы которого соединены соответственно с выходом блока моделирования трансмиссии и вторым выходом датчика вида грунта, третий выход которого подключен к первым входам функциональных преобразователей, выход второго функционального преобразователя соединен со вторым входом первого сумматора, выход которого подключен к третьемувходу второго блока моделирования гусеничного движителя и ко входу первого инвертора, выход которого соединен с третьим входом первого блока моделирования гусеничного движителя, выход которого через второй инвертор подключен к первому входу второго сумматора, второй вход которого соединен с выходом второго блока моделирования гусеничного движителя, выход второго сумматора через блок задания нелинейности подключен ко вторым входам функциональных преобразователей, каждый блок моделирования гусеничного движителя содержит последовательно соединенные сумматор, делитель и инвертор, выход которого является выходом блока моделирования гусеничного движителя, входы сумматора являются соответственно первым, вторым и третьим входами блока моделирования гусеничного движителя.
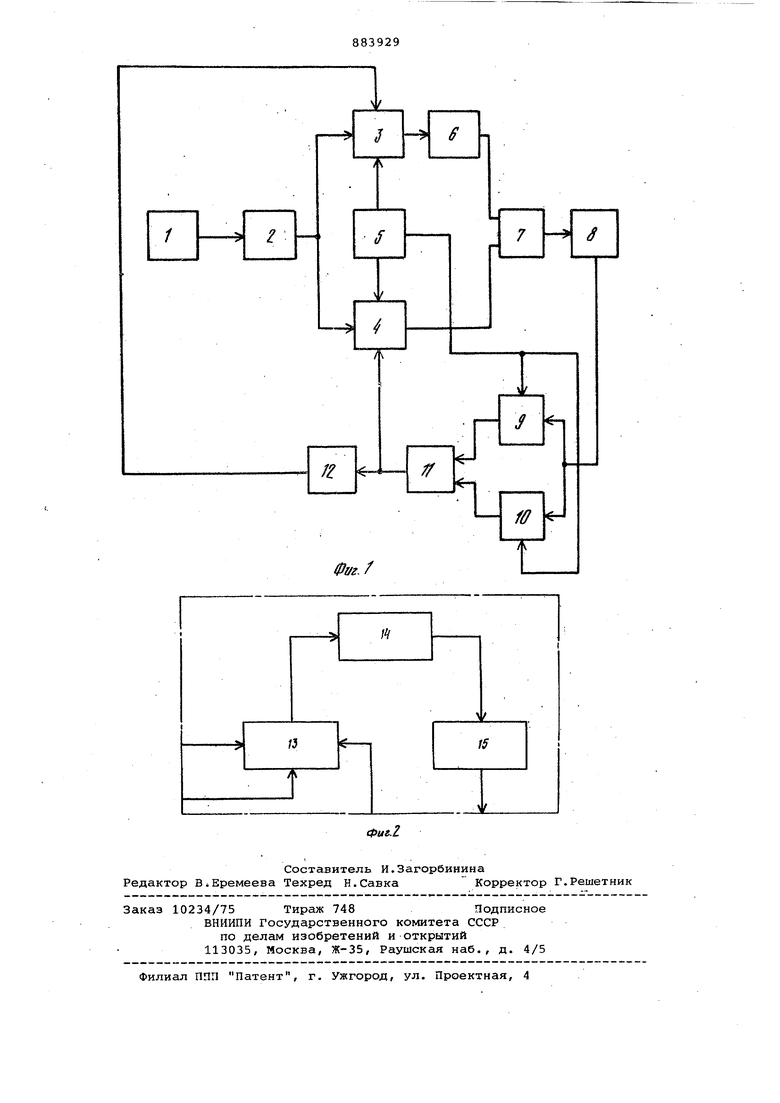
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 схема блока моделирования гусеничного движителя.
Устройство содержит блок 1 моделирования двигателя блок 2 моделирования трансмиссии,блоки 3 и 4 моделирования гусеничного движителя, датчик 5 вида грунта, инвертор б, сумматор 7, блок 8 задания нелинейности, функциональные преобразователи 9 и 10, сумматор 11 и инвертор 12.
Блок моделирования гусеничного движителя содержит сумматор 13,делитель 14, интегратор 15.
Выход блока 1 подключен ко входу блока 2, выходы которого подключены к первым входам блоков моделирования гусеничного движителя 3 и 4, вторые входы которых соединены с датчиком вида грунта 5, выход блока 3 через инвертор б соединен с первым .входом сумматора 7, выход блока 4 соединен со вторым входом сумматора 7, выход которого через блок 8 соединен с первыми входами функциональных преобразователей 9 и 10, вторые входы которых соединены с датчиком вида грунта 5, а выходы соединены с соот,ветствующими входами сумматора 11, выход которого соединен с третьим
входом блока 5 и через инвертор 12 с третьим входом блока 3.
Устройство работает следующим образом.
Напряжение, пропорциональное оборотам вала двигателя и крутящему моменту, с блока 1 поступает на блок 2, моделирующий узлы, входящие в состав трансмиссии гусеничной, машины и само техническое исполнение блока моделирования трансмиссии определяется конструктивными особенностями моделируемой машины.
На выходе блока 2 образуется налряжение,пропорциональное оборотам выходного вала трансмиссии. Это напряжение поступает на первые входы блоков 3 и 4. На выходе каждого блока получается напряжение, пропорциональное скорости движения, соответствующего гусеничного движителя.
Исходя из того, что скорость каждого гусеничного движителя зависит от величины сопротивления грунта прчмолинейкому движению и от величины сопротивления, возникающего при повороте, на второй вход каждого блока 3 и 4 с датчика 5 вида грунта на эти блоки подается также напряжение, определяющее вид грунта, которое в блоках моделирования гусеничного движителя преобразуется в величину момента сопротивления прямолинейному движению.
На третьи входы блоков 3 и 4 подается напряжение, пропорциональное моменту, действующему на гусеничный движитель при повороте, причем знак этого напряжения за счет инвертора 12 будет разный для блоков моделирования гусеничного движителя. Это сделано для того, чтобы при повороте гусеничной машины на изгибающую гусеницу действовал тормозной момент, а на отстающую - раскручивающий.
Формирование напряжения, пропорционального моменту, действукяцему на гусеничный движитель при повороте осуществляется следующим образом.
. С помощью инвертора 6 и сумматора 7 определяется напряжение/ пропорциональное угловой скорости поворота гусеничной машины, т.е. решается зависимость
м
Ш -
где (А) - угловая скорость поворота машины,,
V д - скорость набегающей гусеницы,
V - скорость отстоящей гусеницы,
В расстояние между гусеницами (база гусеничной машины). Определение фактической кривизны траектории поворота осуществляется с помощью блока задания иелинейности 8, который решает зависимость VV 6.. Vi+Vil в целях упрощения принимается, что в диапазонах скоростей, воспро изводимых на тренажере, Y +V A«COri5i. Такое допущение возможно. В этом же блоке задания нелиней ности решается зависимость Мчпач . wax. ) у ) гп&/Чтл максимальный коэффициент сопротивления повороту,з висящей от вида грунтаj а - постоянный коэффициент; R - радиус поворота; в - расстояние между центрам гусениц К - кривизна поворота. Момент сопротивления повороту р At . Т- 4 где JU, - коэффициент сопротивления повороту, Q - вес машины, L - длииа опорной ветви гусен цы. Формирование момента сопротивле ния повороту, которое определяется значением /v и/u.,зависящее от вид грунта, осуществляется с помощью функциональных преобразователей 9 10 и сумматора 11. Каждый функциональный преобразо ватель 9 и 10 формирует момент сопр тивления повороту в зависимости от вида грунта с разной полярностью к торая определяется направлением пов рота гусеничной машины. Напряжение, пропорциональное моменту сопротивления поворота,с выхода сумматора 11 поступает на трет вход блока 4 и через инвертор 12 на третий вход блока 3. ИсгГользование устройства для мод лирования динамики движения гусенич ной машины позволяет повысить точность моделирования, особенно при воспроизведении выполнения поворота так как в отличие от известного в предлагаемом устройстве при определ нии момента сопротивления повороту учитывается кривизна траектории,фак тически получаемая при выполнении поворотов и величина коэффициента с противления повороту в зависимости от вида грунта. Все это позволяет моделировать п вороты с фиксированными и свббодными радиусгили поворота, а также явле ния рекуперации мощности. Формула изобретения 1.Устройство для моделирования динамики движения гусеничной машины, содержащее блок моделирования двигателя, выход которого соединен со входом блока моделирования трансмиссии , первый блок моделирования гусе- . ничного движителя, первый и второй входы которого соединены соответственно с выходом блока моделирования трансмиссии и с первым выходом датчика вида грунта, первый функциональный преобразователь, выход которого подключен к первому входу первого сумматора, отличающееся тем, что, с целью повышения точносffK, в устройство дополнительно введены инверторы, второй функциональный преобразователь, блок задания нелинейности, второй сумматор и второй блок моделирования гусеничного движителя, входы которого соединены соответственно с выходом блока моделирования трансмиссии и вторым выходом датчика вида грунта, третий выход которого подключен к первым входам функциональных преобразователей, выход второго функционального преобразователя соединен со вторым входом первого сумматора, выход которого подключен к третьему входу второго блока моделирования гусеничного движителя и ко входу первого .ора, выход которого соединен с третьим входом первого блока моделирования гусеничного движителя,выход, которого через второй инвертор подключен к первому входу.второго сумматора, второй вход которого соединен с выходом второго блока моделирования гусеничного движителя, выход второго сумматора через блок задания нелинейности подключен ко вторым входам функциональных преобразователей. 2.Устройство для моделирования динамики движения гусеничной машины по п. 1, от.личающееся тем, что каждый блок моделирования гусеничного движителя содерж1 т последовательно соединенные сумматор, делитель и инвертор, выход которого является выходом блока моделирования гусеничного движителя, входы сумматора являются соответственно первым, вторым и третьим входами блока моделирования гусеничного движителя. Источники информации, принятые во внимание при экспертизе 1.Авторс сое свидетельство СССР 486333, кл. G Об G 7/70, 1970. 2.Техническое описание изделия ТТВ-1/765, О 53.00.00.00.00.000ТО (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU942069A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2165646C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
| Устройство для моделирования движения гусеничной машины | 2019 |
|
RU2711769C1 |
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2410756C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
1}
15
