1 . ; Изобретение относится к аналогово вычислительной технике и может найти применение в тренажерах для подготов ки водителей гусеничных машин. Известно устройство для моделирования движения автомобиля, содержащее функциональные преобразователи, сумматоры, интегратор и..блок сравнения f llНаиболее близким к предлагаемому является устройство, содержащее функциональный преобразователь, блО задания нелинейности и последовательно соединенные входной интегра.тр через соответствующий мостовой выпрямитель, подключенный к источнику постоянного напряжения, первый интегратор, усилитель, второй интегра тор, в обратную связь которого вклю чен мостовой выпрямитель С21 Недостатком данных устройств является отсутствие возможности моделирования взаимодействия движителя гусеничной машины с грунтом. Цель изобретения - расширение функциональных возможностей за счет обеспечения воспроизведения взаимодействия гусеничного движителя с грунтом. Поставленная цель достигается тем, что в устройство содержащее источник двухполярного постоянного напряжения, выход которого через первый мостовой выпрямитель соединен соответственно с первым входом и выходом первого интегратора, соединенным с первым входом второго интегратора, выход которого подключен ко входу усилителя, второй мостовой выпрямитель, первая пара противоположных вершин которого соединена соответственно с первым входом и выходом третьего интегратора, первый блок задания нелинейности, функциональные преобразователи к инверторы, введены второй блок задан ся нелинейности, датчик угла наклона местности, блок воспроизведения нелинейности . типа сухого трения и датчик вида грунта, выход которого соединен с первыми входами функциональных преобразовател1ей, вторые входы которых через первый блок задания нелинейности подключены к выходу датчика угла наклона местности, соединенному со входсж второго блока задания нелинейности, выход которого подключен ко второму входу третьего интегратора, выход которого соединен со вторым входом второго интегратора, выход первого функционального преобразователя непосредственно и через первый инвертор подключен соответственно к первому и второму входам блока воспроизведения нелинейности типа сухое трение, третий вход которого соединен с выходом усилителя, выход ограничителя подключен- ко второму входу первого интегратора (И третьему входу третьего интегратора, выход второго функционального преобразователя соединен со входом второго инвертора, выход и вход которого подключены соответственно ко второй паре противоположных верми Второго мостового выпрямителя.
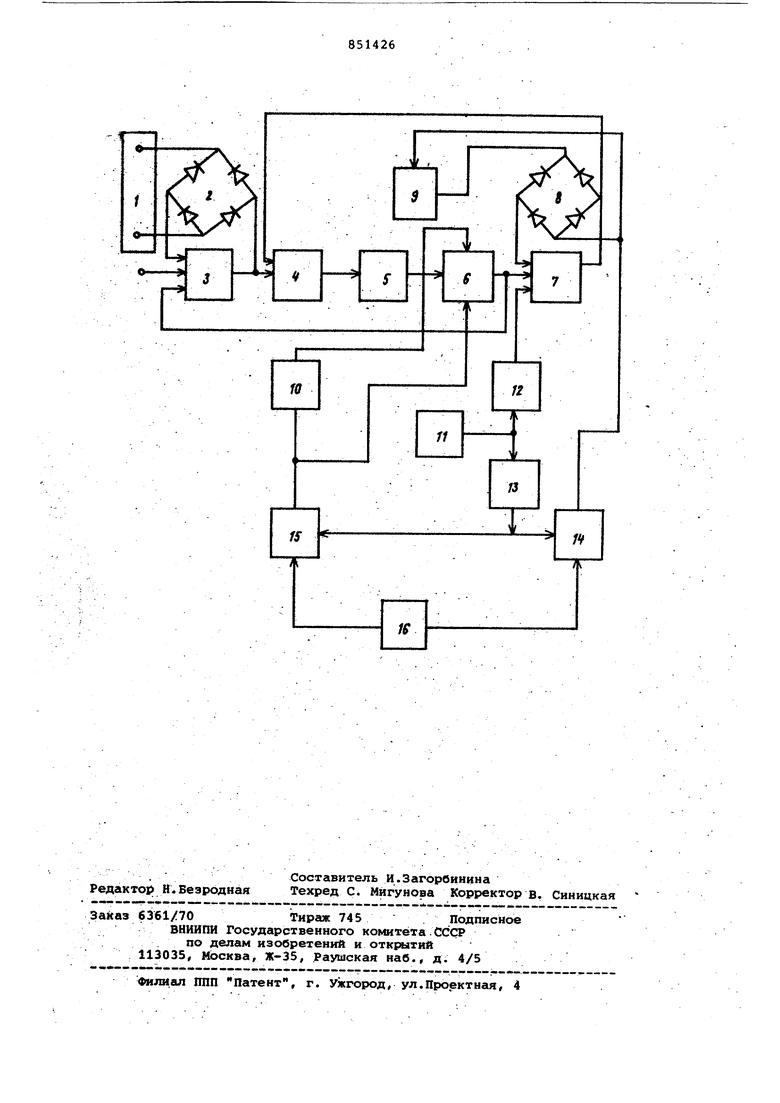
На чертеже представлена схема предлагаемого устройства.
Устройство содержит источник 1 двухполярного постоянного напряжения, мостовой выпрямитель 2, интеграторы 3.и 4,усилитель 5, блок 6 воепроизведения нелинейности типа сухое трение, интегратор 7, мостовой выпрямитель 8, инверторы 9 и 10, датчик 11.угла наклона местности, блоки 12 и 13 задания нелинейности, функциональные преобразователи 14 и 15, датчик 16 вида грунта.
Входной интегратор- 3 через мостовой выпрямитель 2 подключен к источнику 1 двухполярного постояннбго напряжения, выход входного интегратора 3 соединен с последовательно соединенными интегратором 4, усилителем 5, блоком 6 и интегратором 7, в обратную связь которого включен МОСТОВОЙ выпрямитель 8. Выход интегратора 7 соединен со входом интегратора , а выход блока 6 связан со входом интегратора 3. Датчик 16 вида грунта соединен с управляющими входами функциональных преобразователей 14 и 15,
Другие входы функциональных преобразователей 14 и 15 связаны с выходом блока 13 нелинейности, а его вход соединен с датчиком 11 угла наклона местности и со входом блока 12 нелинейности, выход которого связан со входом интегратора 7.
Выход функционального преобразователя 15 соединен с первым управлякхдим входом блока 6 -и через инвертор 10 со вторым управляющим входом блока 6, Выход функционального преобразователя 14 соединен с одним плечом мостового выпрямителя 8 и через инвертор 9 с другим плечом мостового выпрямителя 8,
Устройство работает следукнцим образом.
Интегратор 3 решает уравнение
tjpr ou.
dt
.где 3,,
- момент инерции вращакщихся масс, приведенных к ведущему колесу гусеничного движителя t МКР - крутящий момент, приложенный к ведущему колесу; Мсц - момент сцепления гусеничного движителя с грунтом;
U)g - угловая скорость ведущего колеса.
Мостойой выпрямитель 2 служит для предотвращения самопроизвольной раскрутки ведущего колеса. С выхода интегратора 3 снимается напряжение Ugyg пропорциональное угловой скорости ведущего колеса.
На входе интегратора 4 напряжение сравнивается с напряжением, пропорциональным линейности скорости гусеничного движителя относительно грунта. Это напряжение снимается с выхода интегратора 7,
На выходе интегратора 4 появля- ется напряжение .У„,- пропорциональное моменту, приводящему гусеничную машину в движение. Последнее через усилитель 5 поступает на блок ограничителя 6, который моделирует нелинейность типа сухое трение,Этот блок ограничивает напряжение Of, причем уровень ограничения определяется напряжением и на управляющих входах блока 6, Это напряжение определяет максимальное значение крутящего момента по сцеплению, который приводит в движение гусеничную машину.
Если 1) и,, то имеет место буксование гусениц относительно грунта.
Это-напряжение формируется следующим образом,
С датчика 16 снимается сигнал, определящий вид грунта, этот сигнал поступает на управляющий вход функционального преобразователя 14, где изменяет его коэффициент передачи по управляющему входу, на который подается напряжение, пропорциональное косинусу угла наклона местности Сб , с блока 13 нелинейности, т,е, решается уравнение
G4 -cosrf.
М,
ftic
cu,.iTiax
где г - радиус ведущего колеса; С, - вес гусеничной машины, р - коэффициент сцепления гусенишл с грунтом. Конструктивно датчик вида грунта может быть выполнен в виде переключателя, каждое положение которого соответствует определенному виду грунта/ или в виде блока считывания с какого-либо носителя информации.
Напряжение, пропорциональное ко- сииусу угла наклона ct i формируется блоком 13 иелинейнойти. На вход этого блока с датчика 11 угла наклона местнорти поступает напряжение, проггорциональное углу наклона местности.
Напряжение U с выхода ограничителя поступает на вход интегратора 7, с помощью которого решается- уравнение
()/
где V - линейная скорость перемещения машины/ момент сопротивления,
создаваемый углом наклона местности;
.Л|«, - момент .инерции массы машины, приведенный к ведущему колесу; Mpf-p момент сопротивления,
создаваемый грунтом. Момент, приведенный к ведущему . колесу и создаваемый наклоном местности , .определяется выражением
M(jL fjj G s i no. Это выражение решается с помощью блока 12 задания, на вход которого с датчика 11 угла наклона местности поступает напряжение, пропорциональное этому углу. Конструктивно датчик 11 угла наклона местности может быть выполнен в виде потенциометра (при ручном задании угла) или в виде устройства считывания с какого-либо носителя информации.
Момент сопротивления-движения, создаваемый грунтом, определяется выражением
Gf,
сгр. ыг
cos (.
Это выражение решается с помощьй блока 13 задания нелинейности и функционального преобразователя 15, точно так же, как и в случае определения момента сцепления.
Напряжение, пропорциональное моменту сопротивления, создаваемому грунтом, в разных полярностях через мостовой выпр|Ямитель 8 поступает на интегратор 7. Мостовой выпрямитель 8 предотвращает возможность появления скорости от напряжения, пропорционального моменту сопротивле;ния грунта.
Таким образом, моделируются процессы в.заимодействия гусеничного движителя с грунтом и в результате расширяются функциональные врзможносуи устройства для моделирования механической передачи.
Формула изобретения
Устройство для моделирования динамики движения гусеничной машины.
содержащее источник двухполяриогопостоянного напряжения, выход которого через первый мостовой выпрямитель соединен соответственно с первым входом и выходом первого интегратора, соединенным с первым входом второго интегратора, выход которого подключен ко входу усилителя, второй мостовой выпрямитель, первая пара противоположных вершин которого
соединена соответственно с первым входом и выходом третьего интегратора, первый блок задания иелииейности, функциональные преобразователи и инверторы, отличающееся тем, что, с целью расширеиия функцйональных возможностей за счет обеспечения воспроизв1едения взаимодействия гусеничного движителя с грунтом, введены второй блок задания нелинейности, датчик угла наклона
местности, блок воспроизведения не,линейности типа сухое трение и датчик вида грунта, выход которого соединен с первыми входами функциональных преобразователей, вторые
входы которых через первый блок задания нелинейности подключен к выходу датчика угла наклона местности, соединенному со входом второго блока задания нелинейности, выход которого подключен ко второму входу третьего интегратора, выход которого соединен со вторым входом второго интегратора, выход первого функционального преобразователя непосредственно и
через первый инвертор подключен соответственно к первому и второму
входим блока воспроизведения нелинейности типа сухое трение, третий вход которого соединен с выходом усилителя, выход ограничителя подключей ко второму входу первого
интегратора и третьему входу третьего -интегратора, выход второго функ-. ционального преобразователя соединен со входом второго инвертора, выход
и вход которого подключены соответственно ко второй паре противоположных вершин второго мостового выпрямителя.
Источники информации, принятие во внимаиие при экспертизе
1.4 торское свидетельство СССР P486333, кл. G Об G 7/70, 1973.
2.Авторское свидетельство СССР №6414.65, кл. G 06 G 7/48, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297048C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU942069A1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |