1
Изобретение относится к аналоговой вычислительной технике и может найти применение в тренажерах для подготовки водителей гусеничных машин,
По основному авт„ св. № известно устройство для моделирования динамики движения гусеничной машины, содержащее источник двухполярного постоянного напряжения, выходы которого через первый мостовой выпрямитель соединены с первым входом и выходом первого интегратора, выход которого, через последовательно соединенные второй интегратор, усилитель, первый вход блока воспроизве- (5 дения нелинейности типа сухое трение соединен с вторым входом первого интегратора и первым входом третьего интегратора, второй вход третьего интегратора соединен с выходом 20. второго блока нелинейности, вход которого соответственно соединен с, выходом датчика угла наклона местности и входом первого блока нелинейности, выход последнего соединен с первыми входами.второго и первого Функциональных преобразователей, выход первого функционального преобразователя непосредственно и через инвертор соединен с вторым и первым входами блока воспроизведения нелинейности типа сухое трение , датчик вида грунта своими выходами соединен с вторыми входами первого и второго функциональных преобразователей, выход последнего непосредственно и через инвертор соединен с противоположными вершинами второго мостового выпрямителя, вторая пара противоположных вершин которого соответственно соединена с третьим входом третьего интегратора и одновременно с вторым входом второго интеграторами выходом третьего интегратора 1 ).
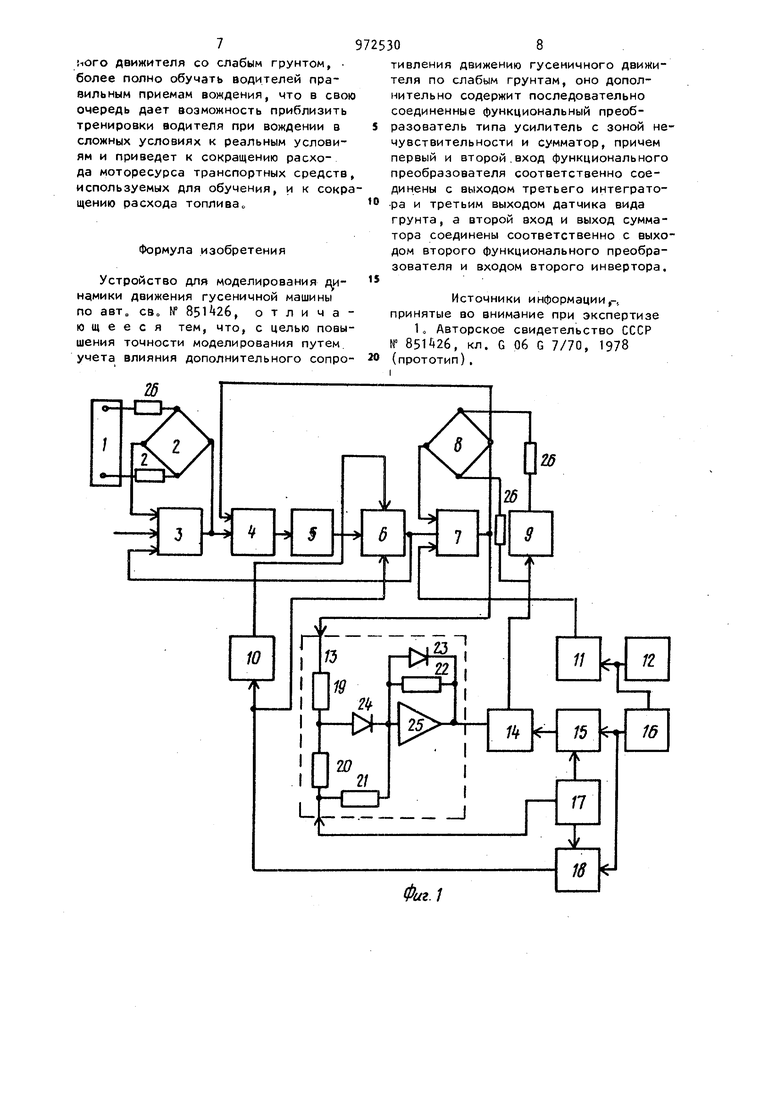
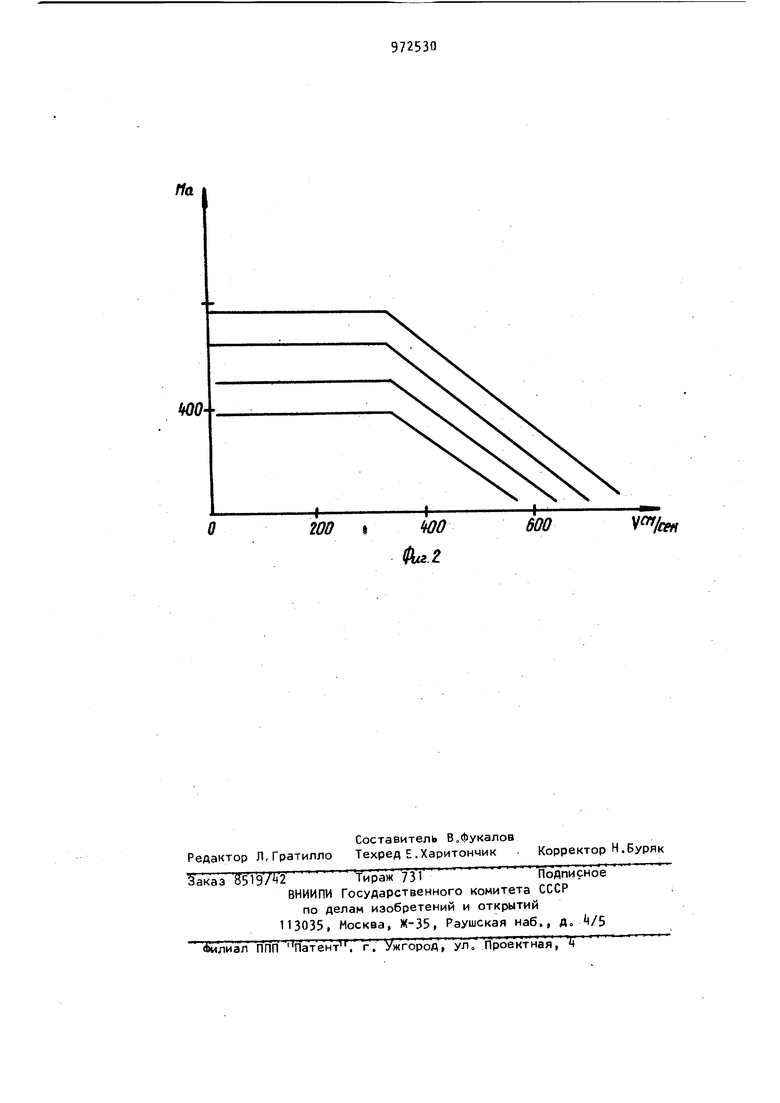
Недостатком известного устройства является отсутствие имитации дополнительного сопротивления, которое возникает при движении гусеничной машины по слабому грунту (снег, песок, пахота и др.) за счет смятия и погружения в грунт под собственным весом машины. Чем меньше скорость и мягче грунт тем На большую глубину де(1)ормируется грунт, и машина испытывает большее дополнительное сопротивление при движении Целью изобретения является повышение точности моделирования за счет учета влияния дополнительного сопротивления при движении гусеничной машины по слабым грунтам. .Эта цель достигается тем, что уст ройство дополнительно содержит функц ональный преобразователь типа усилитель с зоной нечувствительности и су матор, причем первый и второй вход третьего функционального преобразова теля соответственно соединен с выходом третьего интегратора и третьим выходом датчика вида грунта, а второ вход и выход сумматора соединены соответственно с выходом второго функц онального преобразователя и входом второго инвертора. На фиг. 1 изображена функциональная схема устройства на фиг„ 2 зависимость изменения coпpoтивJgeния разных видов грунта от изменения ско рости движения машины Устройство содержит источник 1 двухполярного постоянного напряжения, мостовой выпрямитель 2, интегра торы 3 и 4, усилитель 5, блок 6 нелинейности типа сухое трение, интегратор 7 мостовой выпрямитель 8, инверторы 9 и 10, блок 11 нелинейности, датчик угла наклона местности, функциональный преобразователь 13 типа усилитель с зоной нечувствительности, сумматор 14, второй функциональный преобразователь 15 первый блок 16 нелинейности, датчик 17 вида грунта, первый функционал-ный преобразователь 18, резисторы 19-22, диоды 23 и 2k, операционный усилитель 25, резисторы 26. Работа устройства описывается системой уравнений 4() -гК-) (М,-М), (3) 9 4 ричем, если М,Мец, то М Мсц , (5) де угловая скорость вращения ведущего колеса; 3 - момент инерции, приведенный к ведущему колесу со стороны вращающихся частей трансмиссии и гусеничного движителя; момент упругих сил, возникаю1 1их в гусеничном движителе;суммарная .податливость гусеничного движителя; линейная скорость гусеницы; Гд, - радиус ведущего колеса-, Drt - момент внешних сил, действующий на гусеничный движитель;MC - момент сопротивления движению, определяемый сопротивлением грунта-, t - момент определяемый углом наклона местности; Мп - дополнительный момент сопротивления при движении гусеничной машины по слабым грунтам. Первое уравнение системы решается с помсццью суммируодего интегратора 3, на один вход которого поступает напряжение Уцд, пропорциональное крутящему моменту, на другой - с выхода блока 6 воспроизведения нелинейности типа сухое трение поступает напряжение ,пропорциональное моменту упругих сил . Напряжение UM формируется с помощью суммирующего интегратора , на один вход которого подается напряжение Uy; с выхода суммирующего интегратора 3 и напряжение Uy с выхода суммирующего интегратора 7, учет коэффициента 1/г осуществляется входным резистором суммирующего интегратора 4. В результате на выходе последнего формируется напряжение, пропорциональное , т.е, решается второе уравнение системы Усилитель 5 служит для приведения напряжения Уц до необходимой амплитуды и необходимого знака. С помощью блока 6 воспроизведения нелинейности типа сухое трение, производится решение условия (4 ) системы следующим образом. Если амплитуда напряжения U|i xtJ (последнее подается на управляющие входы и определяет уровень ограниче ния) , то напряжение U без изменения проходит через блок 6. Если же м М напряжение 1),ограничива ется Блоком 6 до напряжения, поданного на управляющие входы,Tie, до величины им.ц,таким образом, на выхо де блокаU -U,. С выхода блока 6 воспроизведения нелинейности типа сухое трение на .пряжение UM. подается на вход суммирующего интегратора 7, на другие входы интегратора поступают напряже ния l M Li-Mf- M,. причем два последних поступают через мостовой выпрямитель 8 для того, чтобы не возника ло движение от момента сопротивления грунта. Напряжения UM, UM, нормиру ются исходя из выражений ..cosoLi dl eK- So i Сц вк где G - вес машины-, dL - угол наклона местности; MCU, момент сцепления гусеницы грунтом; Ч - коэффициент сцепления гусеницы с грунтом. Выражение С6 ) решается следующим образом. С датчика угла наклона местности (датчиком может быть либо потенциометр, либо устройство считывания с какого-либо носителя информации) снимается напряжение U, пропорциональное углу наклона местности, которое поступает на первый блок 16 воспроизведения нелинейности, воспроизводящий косинусную зависимость. Напряжение Uj- g nocTynaeT на вход функционального преобразователя 15 КОТО1ЭЫЙ реализует функцию произведения ffogcl коэффициентов G-Tg На другой вход функциональгого образователя подается напряжение, определяющее вид грунта с датчика 17 (датчиком вида грунта может быть переключатель, потенциометр или устройство считывания с какого-либо носителя информации). Таким образом, на выходе функционального преобразователя 15 формируется напряжение, пропорциональное П.6 UMfI которое поступает на сумматор 1, На другой вход последнего поступает напряжение, пропорциональное дополнительному моменту сопротивления при движении по мягким грунтам U/vi- . Оно формируется следующим образомНапряжение, пропорциональное скорости движения, с интегратора 7 поступает на функциональный преобразователь 13, который формирует характеристики, приведенные на фиг. 2. В функциональном преобразователе 13 это напряжение через резистор IS подается на усилитель 25 Одновременно с выхода датчика 17 вида грунта напряжение, пропорциональное заданному грунту, поступаем на вход резистора 20 и служит опорным напряжением. До тех пор, пока напр ;кение, пропорциональное скорости движении, не компенсирует опорное напряжение, напряжение с датчика 17 вида грунт а через резистор 21 формирует на выходе усилителя 25 максимальный дополнительный момент сопротивления при движении по слабым грунтам . По мере увеличения сигнала, пропорционэльного скорости движения IJv I компенсируется опорное напряжение на аноде диода 2k, и на выходе усилителя 25 уменьшается значение дополнительного сопротивления движению до нуля. Диод 23 препятствует появлению на выходе усилителя 25 напряжения другой полярности. Суммируясь на сумматоре И, напряжение U|v. и U поступают на противоположные вершины мостового вы- прямителя 8 с противоположным знаком за счет инвертора 9 Напряжение U формируется точно так же, как и Г).., только в этом случае используется функциональный преобразователь 18. Напряжение UMJ. подается на упрааляюи ие входы блока 6 воспроизведения нелинейности типа сухое трение с разными знаками. Для изменения знака служит инвертор 10. Аналогично формируется напряжение l(v, которое после функционального преобразователя 11 подает- . ся на вход суммирующего интегратора 7 о Таким образом, предложенное устройство в отличие от известного позволяет более гочно моделировать процессы взаимодействия гусенич ioro движителя со слабым грунтом, более полно обучать водителей правильным приемам вождения, что в сво очередь дает возможность приблизить тренировки водителя при вождении в сложных условиях к реальным условиям и приведет к сокращению расхода моторесурса транспортных средств используемых для обучения, и к сокр щению расхода топлива о Формула изобретения Устройство для моделирования движения гусеничной машины по авт„ сВо № , отлича ющееся тем, что, с целью повы шения точности моделирования путем. учета влияния дополнительного сопро тивления движению гусеничного движителя по слабым грунтам, оно дополнительно содержит последовательно соединенные функциональный преобразователь типа усилитель с зоной нечувствительности и сумматор, причем первый и второй,вход функционального преобразователя соответственно соединены с выходом третьего интегратора и третьим выходом датчика вида грунта, а второй вход и выход сумматора соединены соответственно с выходом второго функционального преобразователя и входом второго инвертора. Источники информации,-,, принятые во внимание при экспертизе 1 о Авторское свидетельство СССР № , кл. G 06 G 7/70, 1978 (прототип). Щ сен