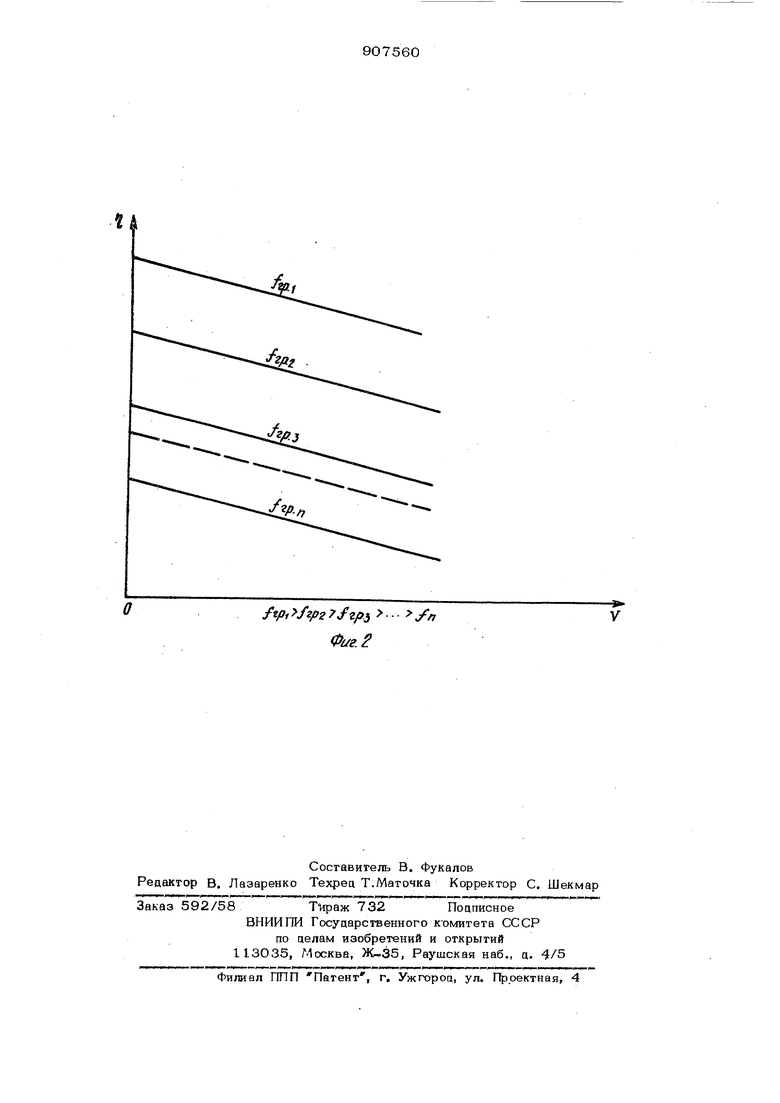
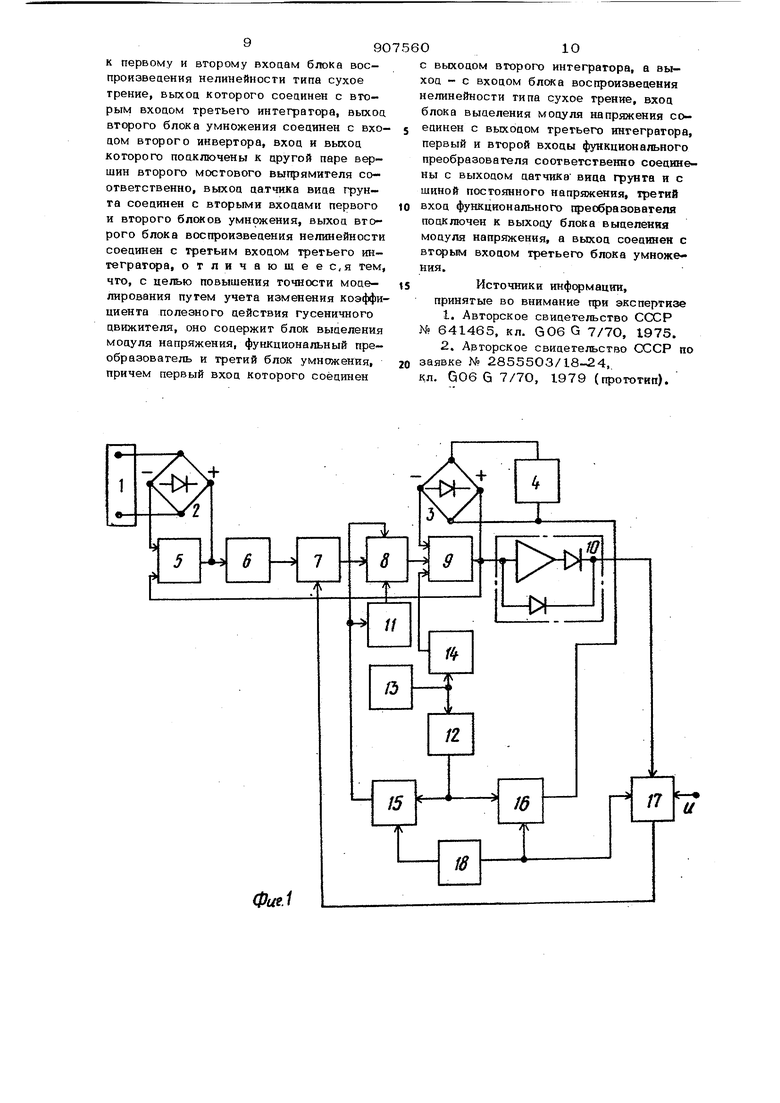
Изобретение относится к аналоговой вычислительной технике и может найти применение в тренажерах для поцготовки воаителей гусеничных машин. Известно устройство цля моцелирова- ния цинамики авижения гусеничной машины, соцержащее функциональный преобра-г зовагель, блок задания нелинейности и послецовательно соединенные вхоаной интегратор, через соответствующий мостово выпрямитель подключен к источнику пос тоянного напряжения, первый интегратор, усилитель, второй интегратор, в обратную связь Которого включен мостовой выпрямитель LIJ . Недостатком устройства является отсутствие возможностей моделирования взаимодействия движителя гусеничной .машины с грунтом. Наиболее близким по техннческой сущ нести к предлагаемому является устройство для моделирования механической пе редачи, содержащее источник цвухполярного напряжения, выход которого через первый мостовой выпрямитель соединен соответственно с первым входом и выходом .первого интегратора соединенным с первым входом второго интегратору втфой мостовой выпрямитель, первая пара противоположных вершин которого соединена соответственно с первым входом и выходом третьего интегратора, соединенным со вторым входом второго интегратора, датчик угла наклона местности, одновременно соединенный со входами первого и второго блоков воспроизведения нелинейности, вькоды которых соответственно соединены со вторым входом третьего интегратора и вторыми входами первого и второго функциональных преобразователей, выход первого функционального преобразователя непосредственно и через первый инвертор подключен соответственно к первому и второму входам блока воспроизведения нелинейности типа сухое трение, выход которого соединен с третьим входом третьего интегратора и со вторым входом первого интегратора. ВЫХОД второго функционального преобраз вателя соединен со входом второго imвертора, выход и вход которого подключены соответственно ко второй паре про тивоположных вершин второго мостового выпрямителя, датчик вида грунта соединен с первыми входами первого и второ функционйт ных преобразователей 23. Недостатком известного устройства является то, что оно не учитывает зави симость коэффициента полезного действи гусеничного движения от скорости движения и от коэффициента сопротивления грунта, что снижает точность моделирования. Так, коэффициент полезного действия (КПД) при коэффициенте сопротивления грунта ,02 и скорости движения км/ч, ,34, а ,2 и км/ч, ,84, т.е. погрешность моделирования на различных режимах может быть более 50%. Цель изобретения - повьпиение точности моделирования динамики движения путем учета изменения коэффициента по- лезного действия гусеничного движителя. Поставленная цель достигается тем, что в устройство для моделирования динамики движения гусеничной машины, содержащее источник двухполярного постоянного напряжения, выход которого через первый мостовой выпрямитель сое динен соответственно с первым входом и выходом первого интегратора, выход которого соединен с входом второго ин тегратора, второй мостовой выпрямитель одна вершина второго мостового выпрямителя подключена к выходу третьего интегратора, а противоположная вершина второго мостового выпрямителя подк-лю- чена к первому входу третьего интегратора, выход которого соединен с вторым входом первого интегратора, датчкк угла наклона местности, соединенны выходом со входом первого и второго блоков воспроизведения нелинейности, выход первого блока воспроизведения нелинейности соединен с первыми входами первого и второго блоков умножения, выход первого блока умножения не- посрецственно и через первый инвертор подключен соогветственно к первому и второму входам блока воспроизведения нелинейностн типа сухое трение, выход которого соединен с вторым входом тре- тьего ингегратора, выход второго блока умножения соединен с входом второго инвертора, выход и вход которого пооключены к другой паре вершин второго . мостового выпрямителя соответственно, выход датчика вида грунта соединен с вторыми входами первого и второго блоков умножения, выход второго блока воспроизведения нелинейности-соединен с третьим входом третьего интегратора, введен блок выделения модуля напряжения, функциональный преобразователь и третий блок умножения, причем первый вход которого соединен с выходом второго интегратора, а выход -со входом блока воспроизведения нелинейности типа сухое трение, вход блока выделения модуля напряжения соединен с выходом третьего интегратора, первый и второй входы функционального преобразователя соответственно соединены с вьсходом датчика вида rpj-HTa и с шиной постоянного напряжения, третий вход функционального преобразователя подключен к выходу блока выделения модуля напряжения, а выход соодинен с вторым входом третьего блока умножения. На фиг. 1 приведена схема предлагаемого устройства; на 4иг. 2 - зависимость, воспроизводимая третьим функциональньп 4 преобр азователем. Устройство содержит источник 1 двух- полярного постоянного напряжения, первый 2 и второй 3 мостовые выпрямители, инвертор 4, первый 5 и второй 6 интеграторы, блок 7 умножения, блок 8 воспроизведения нелинейности типа сухое трение, третий интегратор 9, юлок Ю выо.еления модуля напряжения, инвертор 11, первый блок 12 воспроизведения нелинейности, датчик 13 угла наклона местности, второй блок 14 воспроизведения нелинейности, блоки 15 и 16 умножения, функциональный преобразователь 17, датчик 18 вида грунта. Входной интегратор 5 через мостовой выпрямитель 2 подключен ft источнику 1 двухполярного напряжения, выход первого интегратора 5 соединен с последовательно соединенными вторым интегратором 6, блоком 7 умножения, блоком 8 воспроизведения нелинейности типа сухое трение, третьим интегратором 9, блоком Ю выделэния модуля напряжения, функциональным преобразователем 17, выход которого соединен с вторым входом блока 7 умножения, второй и третий входы функционального преобразователя 17 соединены соответственно с выходом блора 10 выделения модуля напряжения и .выходом датчика 18 вида грунта, выход которого также соеоинен с первыми вхо аами блоков 15 и 16 умножения, вторы вхоаы которого соецинены с выходом первого блока 12 воспроизвецепия нелинейности. Вьгхоц цатчика 13 угла наклона мес ности оановременно соединен со входами первого 12 и второго 14 блоков во произведения нелинейности. Выход после него соединен со.вторым входом третье интегратора 9. Выход блока 15 умножения непосред ственно и через первый инвертор 11 по ключен соотвегственно к первым и вторым входам блока 8 воспроизведения не линейности типа сухое трение. Выход блока 16 умножения соединен со входом второго инвертора 4, выход и вход которого подключены соответственно ко второй паре противоположных вершин второго мостового выпрямителя 3, дру гая пара вершин которого соединена с первым входом и выходом третьего интегратора 9. Работа устройства описывается спе- дующей системой дифференциальных урав нений: Ё.ем.-,м,,) dt -1 I (.„. JL.N h3K -() если M..,/MCU,,TO f --f c причем, WV|,,M(4) М2.-ЛЛх- Ме1, гдечУщ - угловая скорость вращения ведущего колеса; 1) - момент инерции, приведенный ведущему колесу со стороны вращающихся частей трансмис сии и гусеничного движителя; М - крутящий момент, приложенны к ведущему колесу; ЛЛ - момент упругих сил, возникающих в гусеничном авижителе g - суммарная податливость гусеничного движителя; V - линейная скорость гусеницы; - радиус ведущего колеса; -J - момент инерции массы маши ны, гфивеценный к ведущему колесу;У - КПД гусеничного авижитет ДД - момент внещних сил, действующий на гусеничный цвижитель Первое уравнение системы решается с помицью суммирующего интегратора 5, на один вход которого поступает напряжение ))J, пропорциональное крутящему моменту М. на другой -и/1д)2 Р°порциональное моменту упругих сил выхода блока 8 воспроизведения нелийейности типа сухое трение. . Напряжениеицд(2форм1фуется с помощью суммирующего интегратора 6, на один вход которого подастся напряжение U0KC выхода суммирующего интегратора 5 и напряжение Uv с выхода суммирующего интегратора 9. Учет коэффициента 7 осуществляется входным резистором суммирующего интегратора 6. В результате на выходе последнего формируется напряжение, пропорциональноеи (, т.е. рещается второе уравнение системы. Напряжениеи помощью блока 7 умножения умножа- Тся на напряжение Уъ, пропорциональное КПД гусеничного авижи- теля. С выхода блока умножения напряxteimej пропорциональное моменту, приводящему в движение гусеничную машину поступает на блок 8 воспроизведения нел11нейности- типа сухое трение, с помощью которого имитируется сцепление гусеницы с грунтом. На выходе этого блока формируется напряжение, пропорциональное моменту, который непосредственно приводят в движение всю массу мащины, т.е. блок 8 рещает условие (4) системы. Рещение этого условия осуществляется след.ующим образом. Если амплитуда напряжения0 м. (последнее подается на управляющие входы и определяет уровень ограничения),. то напряжениеи д гиез изменения проходит в блок. Если же U i-f-j. UMCH напряжение и -ограничивается блоком до напряжения, поданного на управляющие входы, т.е. 0,0 величины U/i/vCU, Таким образом, на выходе блока 8 N«2. ллси,. Эго напряжение поступает на вход суммирующего интегратора 9, на другие входы которого поступают напр51жение и/л1ги . {фичем 1), идлл+Омх . Послецнее напряжение .поступает на вхоц интегратора через мостовой выпрямитель 3 для того, чтобы не возникло движения от момента сопротивления грунта, В результате на выходе суммирующего интегратора 9 формируется напряжение Uy I пропорциональное линейной скорости движения мащины, т.е. рещается третье уравнение системы. Haпpяжeни ;U лx 0/ и Омсц формируются из выражений ,((, (7 .-QbK coeoL (6) гце MX - момент сопротивления авижению, опреаеляемый сопротивлением грунта; Сд - вес машины; - рааиус ведущего колеса; - коэффициент сопротивления грунта; fj - угол наклона местности; , - момент сопротивления авижению, опреаеляемый углом наклона местности; CU момент сцепления гусеницы с грунтом; - коэффициент сцепления гусеницы с грунтом. Выражение (6) решается следующим образом. С цатчика угла наклона местности (датчиком может быть либо потенциомет
либо устройство считывания какого-ли либо носителя информации) снимается напряжение 0 , пропорциональное углу наклона местности, которое поступает на блок 14 воспроизведения нелинейности, воспроизводящей конусную зависимость. Наггряжение(1.чд|ПОступает на вхоа блока 16 умножения, который реализует функцию произведения f coSoiс учетом коэффициента ЙПзк другой вход блока 16 подается напряжение, определяемое вид грунта с датчика 18 вида грунта (датчиком вица грунта может быть переключатель, потенциометр или устройство считывания с какого-либо носителя информации).
Таким образом, на выходе блока 16 умножения напряжение пропорциональное Удд , которое поступает на противоположные вершины мостового выпрямителя 3 с противоположным знаком за счет инвертора 4.
Напряжение Одлсцформируется точно также, как и только в этом слугчае используется блок 15 умножения. Напряжение подается на управляющие вхоцы олока 8 воспроизведения нелинейности типа сухое трение с разным знаками. Для изменения знака служит инвергор 11.
Напряжение U формируется с помощью функционального преобразователя 17, реализующего зависимость, привености моделирования позволит сократить время обучения на реальных гусеничных машинах, что, в свою очередь, приведет к экономии моторесурса учебных машин, топлива и затрат на содержание учебных трасс.
Формула изобретения
Устройство для моделирования динамики движения-гусеничной машины, содержащее источник двухполярного постоянного напряжения, выход которого через первый мостовой выпрямитель соединен соответственно с первым входом и выходом первого интегратора, выход которого соединен с входом второго интегратора, второй мостовой выпрямитель, одна вершина второго мостового выпрямителя подключена к выходу третьего интегратора, противоположная вершина второго мостового выпрямителя подключена к первому входу третьего интегратора, выход которого соединен с вторым входом первого интегратора, датчик угла наклона местности, соединенный с вхоаами первого и второго блоков воспроизведения нелинейности, выход первого блока воспроизведения нелинейности соединен с первыми входами первого и второго блоков умножения, выход первого блока умножения непосредственно и через первый инвертор подключен соответственно ценную на фиг. 2. На первый вхоа функционального преобразователя поступает напряжение Uy пропорциональное линейной скорости цвижения гусеничной машины, опрецеляюшее наклон линии, соответствующей постоянному значению |-ь . НапряжениеУхгрГОЦЭ тся на второй вхоц функционального преобразователя с датчика 18 виаа грунта. Постоянное напряжение, подаваемое на третий вхоц функционального преобразователь 17, определяет величину Uu при нулевой скорости. Таким образом, преолагаемое устройство в отличие от известного позволяет учитывать влияние КПД на цинамику гусеничной машины, причем сам КПД учитывается здесь как функция скорости и сопротивления движения. Все это повышает точность моделирования динамики движения гусеничной машины. Использование данного устройства в тренажере аля обучения водителя гусеничной машины за счет повышения точк первому и второму входам блока воспроиэвецения нелинейности типа сухое трение, выхоц которого соединен с вторым входом третьего интегратора, выхоа второго блока умножения соецинен с вхо дом второго инвертора, вход и выход которого подключены к другой паре вершин второго мостового выпрямителя соответственно, выход датчика вица грунта соединен с вторыми входами первого и второго блоков умножения, выхоа второго блока воспроизведения нелинейности соединен с третьим входом третьего инrerparc ja, отличающеес,я тем что, с целью повышения точности моделирования путем учета изменения коэффи циента полезного действия гусеничного движителя, оно содержит блок выделения модуля напряжения, функциональный преобразователь и третий блок умножения, причем первый вход которого соединен 9 0 с выходом второго интегратора, а выход - с входом блока воспроизведения нелинейности типа сухое трение, вход блока выделения модуля напряжения соединен с выходом третьего интегратора, первый и второй входы функционального преобразователя соответственно соединены с выходом датчика вица грунта и с шиной постоянного напряжения, третий вход функционального преобразователя подключен к выходу блока выделения модуля напряжения, а выход соединен с втфым входом третьего блока умножения. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР . 641465. кл. Q06 G 7/70, 1975. 2. Авторское свидетельство СССР по аявке N 28555ОЗ/18-24, л. G06 G 7/70, 1979 (п ототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297048C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982031A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |