Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано в областях науки и в областях техники, где требуется обеспечить плавное и стабильное вращение двигателя на малых оборотах.
Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано в областях науки и техники там, где необходимо использовать электродвигатели с плавным ходом.
Известны электродвигатели переменного тока [1], которые состоят из статора, разделенного на конечное число полюсов, и металлического или ферромагнитного ротора. При пропускании электрического тока через обмотки статора в воздушном зазоре между статором и ротором создается вращающееся электромагнитное поле. Витки проводов в обмотках катушек статора равномерно распределены по окружности катушек и пофазно уложены в пазах с определенным угловым расстоянием.
К недостаткам таких устройств относится наличие конечного числа полюсов, что не позволяет использовать их на малых оборотах без дискретного шага двигателя.
Наиболее близким решением по технической сути и достигаемому результату является двигатель, который применяется, например, в индукционном счетчике электроэнергии [2,3,4] и состоит из системы из двух катушек переменного тока и металлического диска, расположенного между ними. Катушки имеют разные радиусы, чтобы повысить вращающий момент диска, так как вращающий момент прямо пропорционален магнитным потокам и, соответственно, прямо пропорционален токам, протекающим через катушки. При протекании переменного тока через обмотки катушек, в них возникают магнитные потоки, эти магнитные потоки наводят вихревые токи в диске, которые отстают на 90 градусов по фазе, по сравнению с токами, возникающими в катушках. Индукционные токи, возникающие в диске, притягиваются к одноименным полюсам в катушках и отталкиваются от противоположных полюсов, и за счет этого диск начинает вращаться. К преимуществу такого двигателя относится возможность обеспечить равномерное вращение диска в широком интервале скоростей.
К недостаткам указанного решения относятся нестабильность частоты вращения, и ее зависимость от внешней нагрузки на двигатель.
Технический результат заявляемого технического решения заключается в повышении стабильности частоты вращения за счет введения общей обратной связи и использования алгоритма пропорционально-интегрально-дифференциального регулирования.
Указанный технический результат достигается за счет того, что в металлическом (медном) диске, закрепленном на вертикальной оси, делают небольшое отверстие, расположенное ближе к краю диска, а две управляющие катушки располагаются с разных сторон диска и сдвинуты по горизонтали друг относительно друга на некоторое расстояние, для создания разности во вращающих моментах. Для повышения и равномерного распределения поля катушек используют ферритовые сердечники. Через катушки пропускается переменный ток, что приводит к возникновению наведенных токов в диске. Для регулировки частоты и повышения стабильности частоты вращения диска используется система из двух оптических световодов. Распространяющийся по первому световоду луч лазера проходит сквозь отверстие в диске и попадает на вход второго световода, на выходе которого установлен фоторезистор, соединенный с аналоговым входом микроконтроллера. Данные с микроконтроллера о скорости вращения диска через USB шину поступают на электронно-вычислительную машину, которая также формирует два синусоидальных сигнала со сдвигом фазы 90° и через PCI шину передает их цифроаналоговым преобразователям. Сформированные синусоидальные сигналы с выходов цифроаналоговых преобразователей поступают на вход буферных усилителей, к выходам которых подключены катушки двигателя. За счет обработки сигнала с микроконтроллера на ЭВМ, и управления амплитудой синусоидального сигнала можно ввести петлю общей отрицательной обратной связи и тем самым программно реализовать алгоритм пропорционально-интегрально-дифференциального регулирования частоты вращения двигателя, что позволяет повысить ее стабильность.
Заостренная в нижней части вертикальная ось двигателя фиксируется в цилиндрическом углублении (канавке) на горизонтальной нижней опоре. Сверху ось закреплена в центре шарикового подшипника. Это позволяет плоскому диску (ротору), жестко закрепленному на этой оси, свободно вращаться в горизонтальной плоскости под действием приложенного переменного электромагнитного поля. Для обеспечения равномерности вращения и подавления колебательных движений ротора при выключении тока через обмотки и повышения стабильности скорости вращения используется магнитный демпфер - постоянный магнит, установленный над диском. Верхняя часть вертикальной оси, выступающая на несколько см над шариковым подшипником, позволяет крепить на оси устройства для передачи вращения другим деталям, например, лопастям вентилятора.
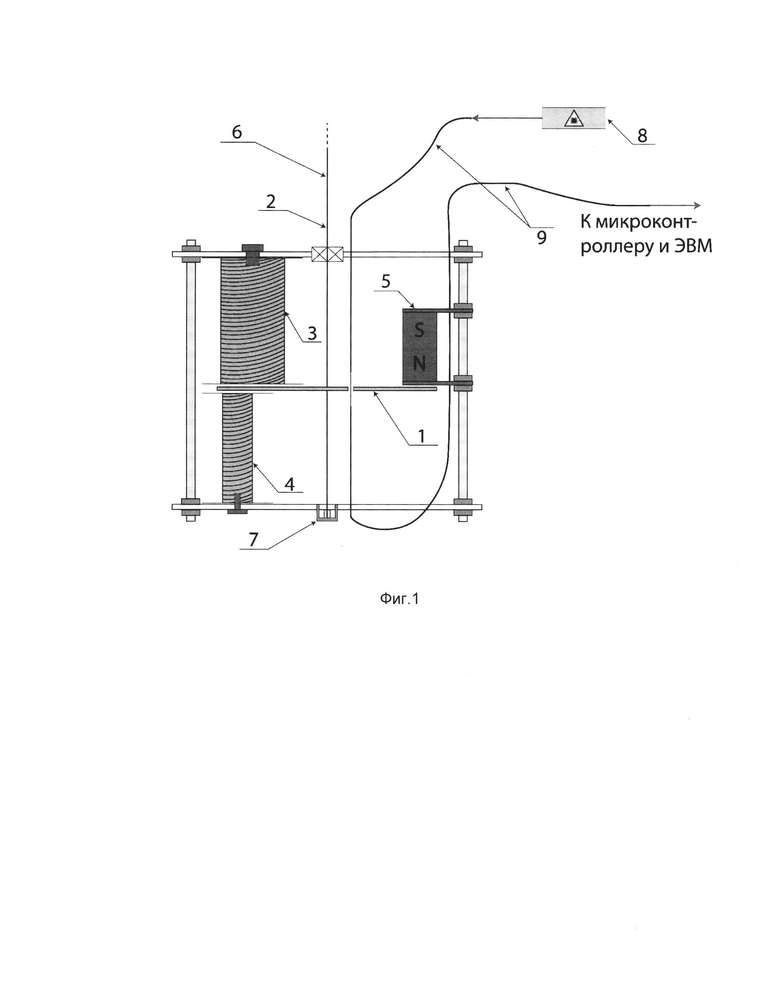
На фиг. 1 представлена общая схема двигателя.
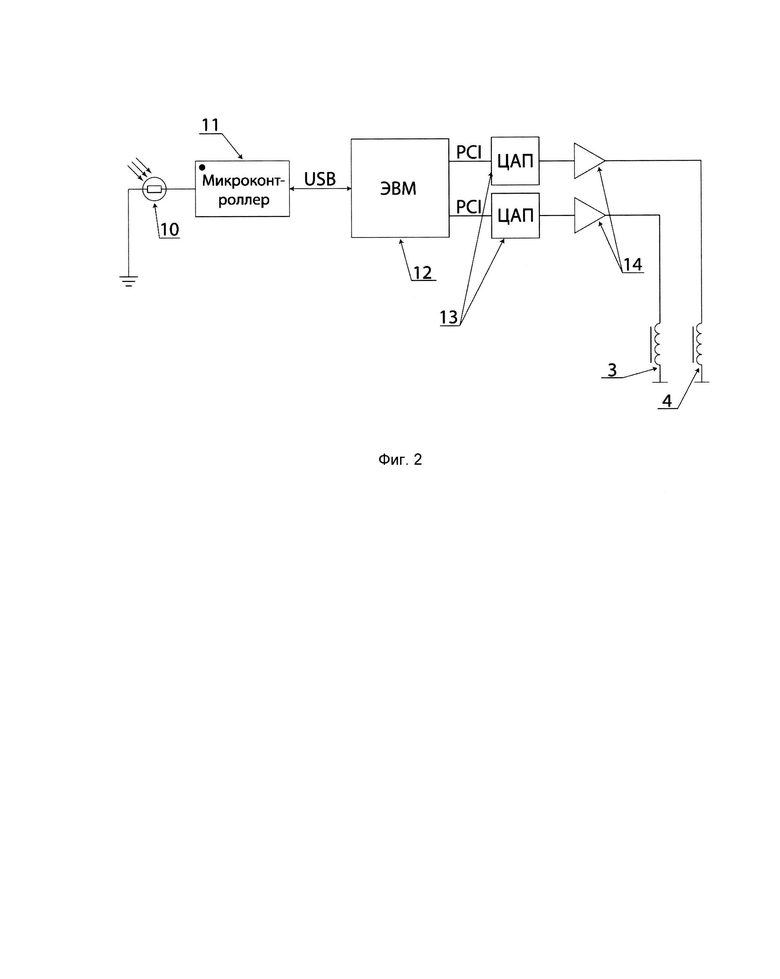
На фиг. 2 представлена схема управления электромагнитным двигателем.
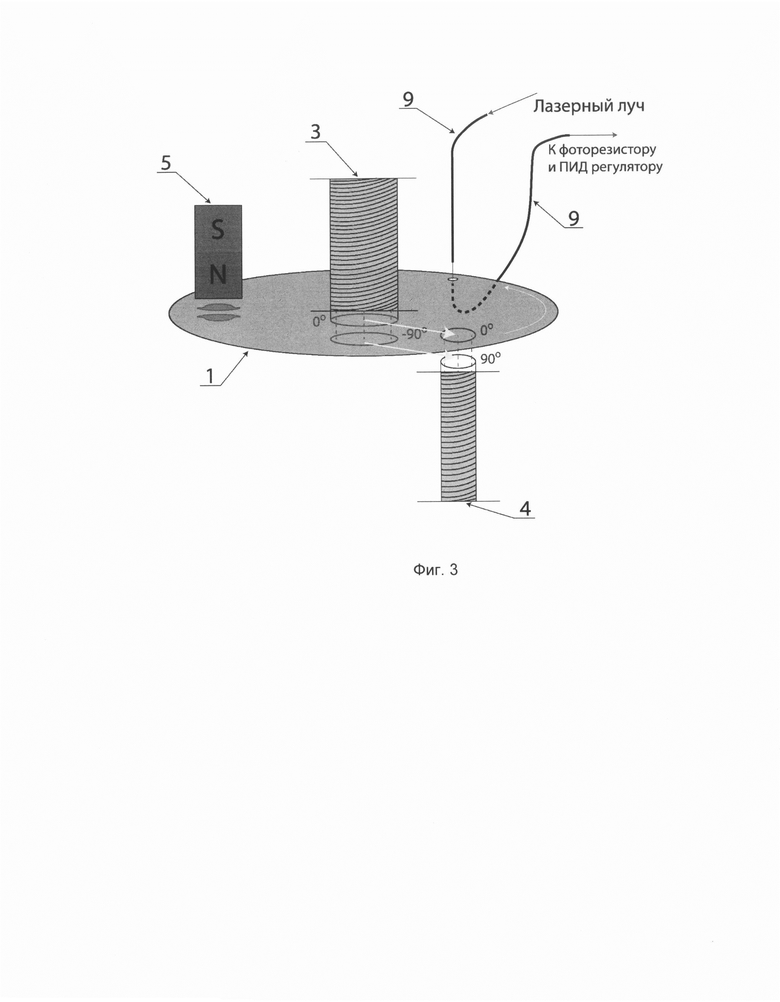
На фиг. 3 представлена принципиальная схема взаимодействия между токами, проходящими через катушки, и токами, возникающими в диске схема управления движением двигателя.
Электромагнитный двигатель содержит медный диск 1, который крепится на вертикальной оси 2, управляющие катушки разных диаметров 3 и 4, постоянный магнит 5, подшипник 6, посадочная канавка 7, лазер 8, световоды 9, фоторезистор 10, микроконтроллер 11, ЭВМ (блок управления) 12, цифроаналоговые преобразователи 13 и усилители сигнала 14.
Электромагнитный двигатель работает следующим образом.
В исходном состоянии плоский диск (1), жестко закрепленный на вертикальной оси (2), и катушки (3) и (4) находятся в состоянии равновесия. При пропускании переменного электрического тока через катушки (3) и (4) в них индуцируется переменное магнитное поле. Разность фаз между токами, протекающими по обмоткам катушек (3) и (4), составляет 90 градусов. Работа внешних источников переменного тока контролируется ЭВМ (12), которая управляет работой двигателя. Пронизывающие диск (1) магнитные потоки наводят в нем индукционные токи Фуко. Наведенные в диске (1) токи отстают от заданных токов в катушках (3) и (4) на 90°. Взаимодействующие между собой токи с одинаковой фазой притягиваются, а противоположные - отталкиваются, что приводит к вращению диска (1). Приложенный к диску вращающий магнитный момент пропорционален произведению токов, протекающих через катушки (3) и (4), МВр ~I1 ⋅ I2. Для обеспечения равномерности вращения диска (1) в конструкцию двигателя добавляется магнитный демпфер (см. рис. 2) -постоянный магнит (5), который при вращении диска (1) наводит в нем собственные токи Фуко. При взаимодействии с полем постоянного магнита (5) эти токи создают тормозящий момент МТорм, величина которого пропорциональна скорости вращения диска (1), МТорм ~ ω. Когда разгоняющий момент МВр сравнивается по величине с тормозящим моментом, диск (1) вращается с постоянной скоростью. Таким образом, угловая скорость вращения диска (1) оказывается пропорциональной произведению токов, проходящих через обмотки катушек ω ~I1 ⋅ I2. Диск (1) жестко крепится на вертикальной оси (2), которая сверху закреплена в центре опорного подшипника (6), а снизу заостренным концом опирается на плоскую металлическую поверхность в канавке на опорной пластине (7).
Для обеспечения равномерного вращения диска (1) необходимо ввести обратную связь, состоящую из микроконтроллера (11), ЭВМ (12) и программируемого ПИД-регулятора, цифроаналоговых преобразователей (13) и усилителей сигнала (14). Для контроля за скоростью вращения диска (1) используется оптическая система, состоящая из двух световодов (9). Луч лазера (8) проходит через небольшое отверстие на краю диска, на выходе нижнего световода установлен фоторезистор (9), который реагирует на изменение мощности приходящего светового пучка. Выходной сигнал с фоторезистора обрабатывается микроконтроллером (11). Мощность сигнала, поступающего на ЭВМ с выхода микроконтроллера, зависит от скорости вращения диска. ПИД-регулятор подстраивает силу тока в катушках (3) и (4) для выравнивания скорости вращения диска (1). Подстраивая параметры ПИД-регулятора через ЭВМ (11), можно легко регулировать изменение скорости вращения диска (1) в режиме реального времени, а также поддерживать стабильную скорость вращения и плавность хода диска (1). Подшипник (6), в центре которого закреплена ось (2), обеспечивает жесткое сцепление оси с верхней неподвижной опорой двигателя, что способствует подавлению люфта при вращении вертикальной оси (2). На нижней опоре сделана канавка, в которую входит заостренный нижний конец оси. Диаметр канавки близок к диаметру оси, что сводит к минимуму перемещение нижней части оси (люфт) по горизонтали.
Ссылки
1. Алиев И.И. - Асинхронные двигатели в трехфазном и однофазном режимах - 2004 - РадиоСофт, Москва;
2. Минин Г.П. Измерение электроэнергии - 1974 - Библиотека электромонтера - Вып. 394 - «Энергия», Москва;
3. Труб И.И. Обслуживание индукционных счетчиков и цепей учета в электроустановках - 1983 - Библиотека электромонтера - Вып.553 - Энергоатомиздат, Москва;
4. Интернет-ресурс https://studylib.ru/doc/222017/nedouchet-potreblyaemoj-moshhnosti-na-malen._kih-tokah;
5. Денисенко В. ПИД-регуляторы: принципы построения и модификации - 2006 - В записную книжку инженера - Вып.4 - СТА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный двигатель переменного тока, работающий при низких температурах | 2024 |
|
RU2837264C1 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ, НАПРИМЕР ВОРОТ И ДВЕРЕЙ | 1998 |
|
RU2144600C1 |
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА БАРАБАНА КОНТАКТНОЙ СУШКИ | 2020 |
|
RU2741359C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| САМОПОДДЕРЖИВАЮЩАЯСЯ МАГНИТО-ГРАВИТАЦИОННАЯ СИСТЕМА "МОТОР-ГЕНЕРАТОР" С АВТОСТАБИЛИЗАЦИЕЙ РЕЖИМА РЕЗОНАНСА КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТА | 2018 |
|
RU2699021C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| Измерительный комплекс для экспресс-контроля параметров приемных катушек автоматической локомотивной сигнализации | 2016 |
|
RU2627250C1 |
| Индукционный измеритель положения вращающегося вала | 2019 |
|
RU2704672C1 |
Изобретение относится к электротехнике, в частности к электромагнитным двигателям. Технический результат – повышение стабильности частоты вращения. Электромагнитный двигатель переменного тока с плавным ходом на низких оборотах, включающий в себя медный диск, закрепленную перпендикулярно диску вертикальную ось, которая сверху закреплена в шариковом подшипнике, а снизу зафиксирована в посадочную канавку, две катушки разных диаметров, через которые пропускается переменный ток, постоянный магнит для обеспечения равномерности вращения диска. Особенностью изобретения является наличие петли обратной связи. Для ее осуществления микроконтроллер, соединенный с фоторезистором, получает и обрабатывает сигнал о прохождении лазерного луча через отверстие в диске, а затем передает его на ЭВМ с реализованным на нем ПИД-регулятором. 3 ил.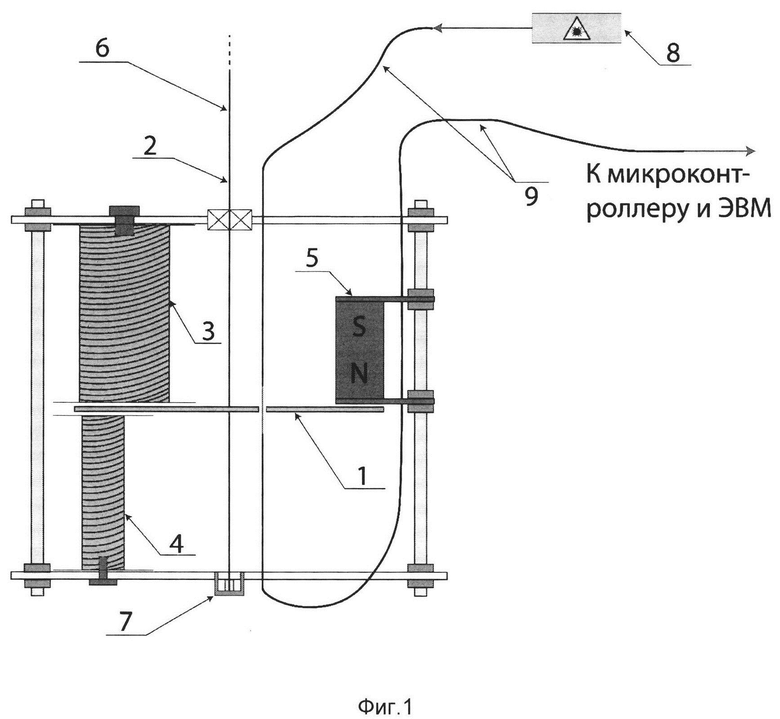
Электромагнитный двигатель переменного тока с плавным ходом на низких оборотах, включающий в себя медный диск, закрепленную перпендикулярно диску вертикальную ось, которая сверху закреплена в шариковом подшипнике, а снизу зафиксирована в посадочную канавку, две катушки разных диаметров, через которые пропускается переменный ток, постоянный магнит для обеспечения равномерности вращения диска, отличающийся тем, что в систему вводится петля обратной связи, представляющая собой компьютеризированную оптическую систему регистрации и управления скоростью вращения ротора двигателя, содержащую лазер, луч которого через световод попадает на фоторезистор, преобразующий световой сигнал в электрический и соединенный с микроконтроллером и цифроаналоговыми преобразователями, которые с помощью ПИД-регулятора, реализованного в виде программы на ЭВМ, поддерживают равномерное вращение диска.
| JP 2005127939 A, 19.05.2005 | |||
| Контрольно-измерительное приспособление с электроконтактами для автоматического управления процессом шлифования колец, например, колец шарикоподшипников | 1948 |
|
SU80254A1 |
| Устройство для измерения оборотов диска индукционного счетчика | 2017 |
|
RU2654919C1 |
| Индукционный счетчик электрической энергии | 1985 |
|
SU1285378A1 |
| ЭЛЕКТРИЧЕСКИЙ СЧЕТЧИК С ВРАЩАЮЩИМСЯ ПОЛЕМ | 1926 |
|
SU7284A1 |
| СКОРОСТНАЯ ЖЕЛЕЗНАЯ ДОРОГА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2363801C2 |
