Изобретение относится к транспортному машиностроению, а именно к многоколёсным автотранспортным средствам, в том числе аккумуляторным электрическим колёсным транспортным средствам, и может быть использовано в их конструкции и управлении.
Известен способ управления ускорением транспортного средства с помощью одной педали хода, заключающийся в формировании уставок тягового, тормозного момента, а также его отсутствия для организации движения накатом (выбег). Данный способ описан для колёсного аккумуляторного транспортного средства (электромобиля) полной массой до 1500 кг. Способ заключается в формировании таблицы реакций тягового электрического привода электромобиля на положение педали хода, а именно в формировании уставок тягового крутящего момента и рекуперативного момента в зависимости от положения педали. При сильном нажатии на педаль формируется тяговый момент, а именно при 100% нажатии тяговый привод реализует максимальный крутящий момент (режим kikdown) или в зависимости от текущей скорости движения иной крутящий момент и машина будет разгоняться. При положении педали хода в зависимости от скорости до 50% привод может реализовывать тормозной момент, а транспортное средство будет замедляться. Также с помощью данного алгоритма реализуется режим движения накатом для обеспечения энергоэффективности.
Правая граница зоны наката определяется  , где
, где  эмпирический коэффициент. Левая граница зоны реализации наката определяется
эмпирический коэффициент. Левая граница зоны реализации наката определяется  , где с = 0,1 также коэффициент полученный эмпирически. Также представленный способ указывает на снижение рекуперативного момента на скоростях электромобиля свыше 60 км/ч с 90% до 65% при 130 км/ч, а также при скорости менее 10 км/ч до 40% от максимально возможного рекуперативного момента для обеспечения комфорта движения водителя и пассажиров. Уставка крутящего (рекуперативного) момент определяется в виде зависимости
, где с = 0,1 также коэффициент полученный эмпирически. Также представленный способ указывает на снижение рекуперативного момента на скоростях электромобиля свыше 60 км/ч с 90% до 65% при 130 км/ч, а также при скорости менее 10 км/ч до 40% от максимально возможного рекуперативного момента для обеспечения комфорта движения водителя и пассажиров. Уставка крутящего (рекуперативного) момент определяется в виде зависимости  , где ar, br, cr - коэффициенты определяемые из граничных условий
, где ar, br, cr - коэффициенты определяемые из граничных условий  ,
,  ,
,  , где
, где  - уставка максимального рекуперативного момента при полностью отпущенной педали (см. Jiquan Wang, Battery electric vehicle energy consumption modelling, testing and prediction: a practical case study. PhD thesis, Eindhoven University of Technology, Eindhoven, the Netherlands, 2016).
- уставка максимального рекуперативного момента при полностью отпущенной педали (см. Jiquan Wang, Battery electric vehicle energy consumption modelling, testing and prediction: a practical case study. PhD thesis, Eindhoven University of Technology, Eindhoven, the Netherlands, 2016).
Недостатки известного способа управления в том, что он не учитывает характеристики транспортного средства и параметры движения, что сказывается на качестве и эффективности управления, так как параметры указаны только для конкретных характеристик электромобиля. Также предложенный S – образный характер зависимости реализуемого крутящего момента от положения педали для зоны работы в тяговом режиме и реализации максимального тягового момента только при 100% нажатии на педаль, что не позволяет обеспечить реализацию функции «Помощь при трогании на подъёме» и повысить безопасность из-за изменения ответной реакции привода на небольшие изменения положения педали хода на высоких скоростях.
Известен также способ и устройство для управления транспортным средством, заключающееся в реализации обнаружения активации управления одной педалью при движении вперёд и назад под нагрузкой со скоростью ниже определенной скорости движения (например, 10 м/с) после нажатия и отпускания педали тормоза (см. патент RU 2 785 934 С1, опубликовано: 15.12.2022г., МПК В60L).
Недостатки этого способа управления заключаются в том, что данный способ не позволяет обеспечить в полной мере метод однопедального управления транспортным средством во всем диапазоне скоростей движения и не позволяет реализовать рекуперативное торможение и движение накатом.
За прототип, по совокупности существенных признаков, принимаем способ управления тормозной/движущей силой, заключающийся в корректировке установленной педалью хода силы тяги или торможения, рассчитанной из условия движения по ровной дороге в зависимости от продольного уклона дороги и скорости движения путем введения корректирующих уставок крутящего или рекуперативного момента. При движении на подъём система управления, построенная с применением способа, увеличивает тяговый крутящий момент и силу тяги для поддержания скорости движения, при движении на спуск, в зависимости от его величины и скорости движения, снижает тяговый крутящий момент или создает рекуперативный тормозной момент для поддержания скорости движения (см. патент RU 2 699 204 C1, опубликовано: 03.09.2019г., МПК B60L).
Известный способ обеспечивает сравнительно низкую энергоэффективность тягового электропривода транспортного средства, так как не учитывает характеристики тягового электропривода самого транспортного средства и не обеспечивает возможности движения транспортного средства накатом.
Кроме этого в системе управления, построенной с применением данного способа, осуществляется линейная зависимость уставки крутящего момента от степени нажатия на педаль, что на высоких скоростях движения приводит к излишней резкости реакций транспортного средства на изменение степени нажатия, в результате снижается безопасность движения. Способ управления требует определения величины продольного уклона дороги, что требует специального оборудования или алгоритмов обработки GPS данных, что усложняет систему, иначе при управлении и корректировке момента могут возникать автоколебательные явления в системе управления тяговым электродвигателем.
Была поставлена задача повышения энергоэффективности транспортного средства за счёт оптимальной реализации режима движения накатом, тяговых и тормозных режимов в зависимости от реальной дорожной ситуации и параметров транспортного средства за счёт задействования одной педали хода.
Поставленная задача решается за счет того, что реализуется способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода путем формирования уставок крутящего и рекуперативного моментов на валу тягового электродвигателя, при котором:
блок управления, по сигналам датчиков, определяет текущую скорость транспортного средства, текущее положение педали хода, рассчитывает положение границ зон: тягового режима, режима движения по инерции, тормозного режима, правой границы зоны наката и левой границы зоны наката и непрерывно корректирует требуемое продольное ускорение или замедление транспортного средства после изменения положения педали хода путём корректировки уставки тягового и рекуперативного момента тягового электродвигателя;
при этом, если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента будет равна нулю, то блок управления реализует генерацию команд для осуществления режима движения по инерции;
если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента соответствует алгоритму с повышенной энергоэффективностью, то блок управления реализует генерацию команд для осуществления режима базового рекуперативного момента с целью увеличения энергоэффективности;
если измеренное положение педали не соответствует диапазону больше левой границы наката и меньше правой границы наката, то возможно реализовать тяговый или рекуперативный режим движения;
причем, если измеренное положение педали находится в диапазоне значений больше нуля и меньше или равно правой границе наката, то блок управления рассчитывает максимально возможную уставку рекуперативного момента, определяет коэффициенты, необходимые для расчета требуемой уставки рекуперативного момента, рассчитывает требуемую уставку рекуперативного торможения и реализует генерацию команд для осуществления режима замедления, при этом алгоритм обеспечивает плавный переход от рекуперативного режима к движению по инерции или базовой рекуперации и обратно;
если положение педали соответствует диапазону значений больше нуля, больше правой границы наката и меньше или равно правой границе тягового режима, в котором не доступен максимально возможный крутящий момент, блок управления рассчитывает максимально возможную уставку тягового момента, определяет коэффициенты, необходимые для расчета требуемой уставки тягового момента, рассчитывает требуемую уставку и реализует генерацию команд для осуществления режима движения, необходимого для реализации ускорений в эксплуатации транспортного средства, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно;
если положение педали не соответствует диапазонам значений больше правой границы наката, больше нуля, больше правой границы зоны тягового режима, в котором не доступен максимально возможный крутящий момент, соответствующий работе в наиболее вероятных эксплуатационных режимах и меньше или равно единице (полное нажатие) одновременно, блок управления генерирует сигналы для реализации максимально возможного крутящего момента для трогания транспортного средства с места, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно.
Совокупность существенных признаков, заключающаяся в том, что «блок управления, по сигналам датчиков, определяет текущую скорость транспортного средства, текущее положение педали хода, рассчитывает положение границ зон: тягового режима, режима движения по инерции, тормозного режима, правой границы зоны наката и левой границы зоны наката и непрерывно корректирует требуемое продольное ускорение или замедление транспортного средства после изменения положения педали хода путём корректировки уставки тягового и рекуперативного момента электродвигателя;
при этом, если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента будет равна нулю, то блок управления реализует генерацию команд для осуществления режима движения по инерции;
если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента соответствует алгоритму с повышенной энергоэффективностью, то блок управления реализует генерацию команд для осуществления режима базового рекуперативного момента с целью увеличения энергоэффективности;
если измеренное положение педали не соответствует диапазону больше левой границы наката и меньше правой границы наката, то возможно реализовать тяговый или рекуперативный режим движения;
причем, если измеренное положение педали находится в диапазоне значений больше нуля и меньше или равно правой границе наката, то блок управления рассчитывает максимально возможную уставку рекуперативного момента, определяет коэффициенты, необходимые для расчета требуемой уставки рекуперативного момента, рассчитывает требуемую уставку рекуперативного торможения и реализует генерацию команд для осуществления режима замедления, при этом алгоритм обеспечивает плавный переход от рекуперативного режима к движению по инерции или базовой рекуперации и обратно;
если положение педали соответствует диапазону значений больше нуля, больше правой границы наката и меньше или равно правой границе тягового режима, в котором не доступен максимально возможный крутящий момент, блок управления рассчитывает максимально возможную уставку тягового момента, определяет коэффициенты, необходимые для расчета требуемой уставки тягового момента, рассчитывает требуемую уставку и реализует генерацию команд для осуществления режима движения, необходимого для реализации ускорений в эксплуатации транспортного средства, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно;
если положение педали не соответствует диапазонам значений больше правой границы наката, больше нуля, больше правой границы зоны тягового режима, в котором не доступен максимально возможный крутящий момент, соответствующий работе в наиболее вероятных эксплуатационных режимах и меньше или равно единице (полное нажатие) одновременно, блок управления генерирует сигналы для реализации максимально возможного крутящего момента для трогания транспортного средства с места, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно» позволяет добиться повышения энергоэффективности транспортного средства с тяговым электродвигателем за счёт оптимальной реализации режима движения накатом, тяговых и тормозных режимов в зависимости от реальной дорожной ситуации и параметров транспортного средства.
Кроме этого предлагаемым изобретением решаются задачи снижения утомляемости водителя, повышения безопасности, удобства управления продольной динамикой транспортного средства путем задействования одной педали хода, повышения энергоэффективности за счёт оптимальной реализации тяговых, тормозных режимов и режима движения накатом, в зависимости от реальной дорожной ситуации и параметров транспортного средства, повышения надежности механической трансмиссии, за счёт реализации плавного изменения уставки крутящего момента с нулевой асимптотой и кратковременной выдержкой нулевого значения уставки при переходе от тормозного режима к тяговому и обратно и исключения при этом динамических ударных нагрузок, повышения безопасности движения, за счёт реализации оптимальной реакции на изменение положения педали хода на высоких скоростях движения, что также в свою очередь позволяет повысить энергоэффективность исключив броски крутящего момента.
В зависимости от режима движения затраты энергии на движение были снижены для городских условий эксплуатации на 17…35%, для междугороднего движения 7…10%.
В результате поиска по общедоступным источникам научно-технической и патентной информации, способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода, совпадающий со всей совокупностью существенных признаков заявляемого решения, обнаружен не был и совокупность существенных признаков не вытекает явным образом из современного уровня техники. Следовательно, можно предположить соответствие заявляемого технического решения условиям патентоспособности «новизна» и «изобретательский уровень».
Изобретение иллюстрируется чертежами, на которых представлены:
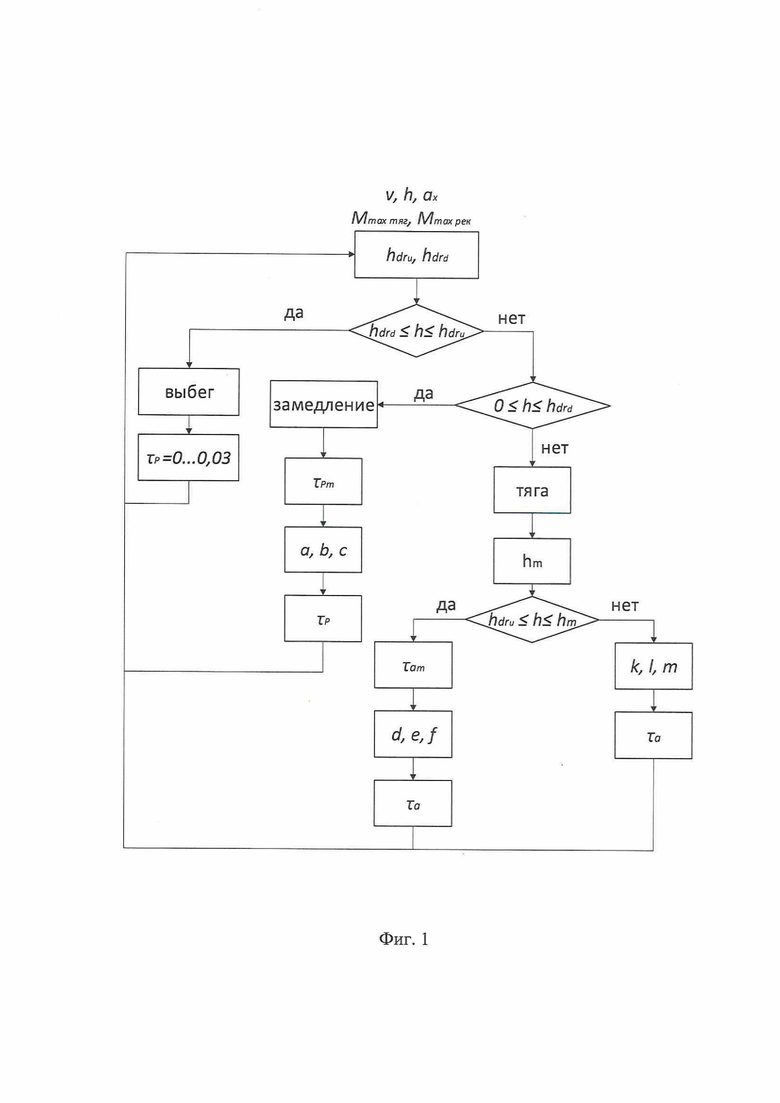
Фиг. 1 – Алгоритм управления с помощью одной педали хода,
где:
V - скорость движения;

 положение педали хода;
положение педали хода;

 - положение педали соответствующее правой граница зоны движения накатом;
- положение педали соответствующее правой граница зоны движения накатом;
 - положение педали соответствующее левой граница зоны движения накатом;
- положение педали соответствующее левой граница зоны движения накатом;
 - уставка рекуперативного момента для тормозного режима;
- уставка рекуперативного момента для тормозного режима;
 - максимальная уставка рекуперативного момента в зависмости от скорости движения;
- максимальная уставка рекуперативного момента в зависмости от скорости движения;
a, b, c – коэффициенты полинома для расчёта уставки рекуперативного момента для режима торможения;
- уставка рекуперативного момента для тормозного режима;
 – уставка крутящего момента для тягового режима, соответствующее положению педали доступности максимального крутящего момента электродвигателя;
– уставка крутящего момента для тягового режима, соответствующее положению педали доступности максимального крутящего момента электродвигателя;
d, e, f – коэффициенты полинома для расчёта уставки тягового момента для тягового режима;
 - уставка крутящего момента в зоне тягового режима;
- уставка крутящего момента в зоне тягового режима;
k, l, m – коэффициенты полинома для расчёта уставки рекуперативного момента для тягового режима с возможностью реализации максимального крутящего момента электродвигателя;
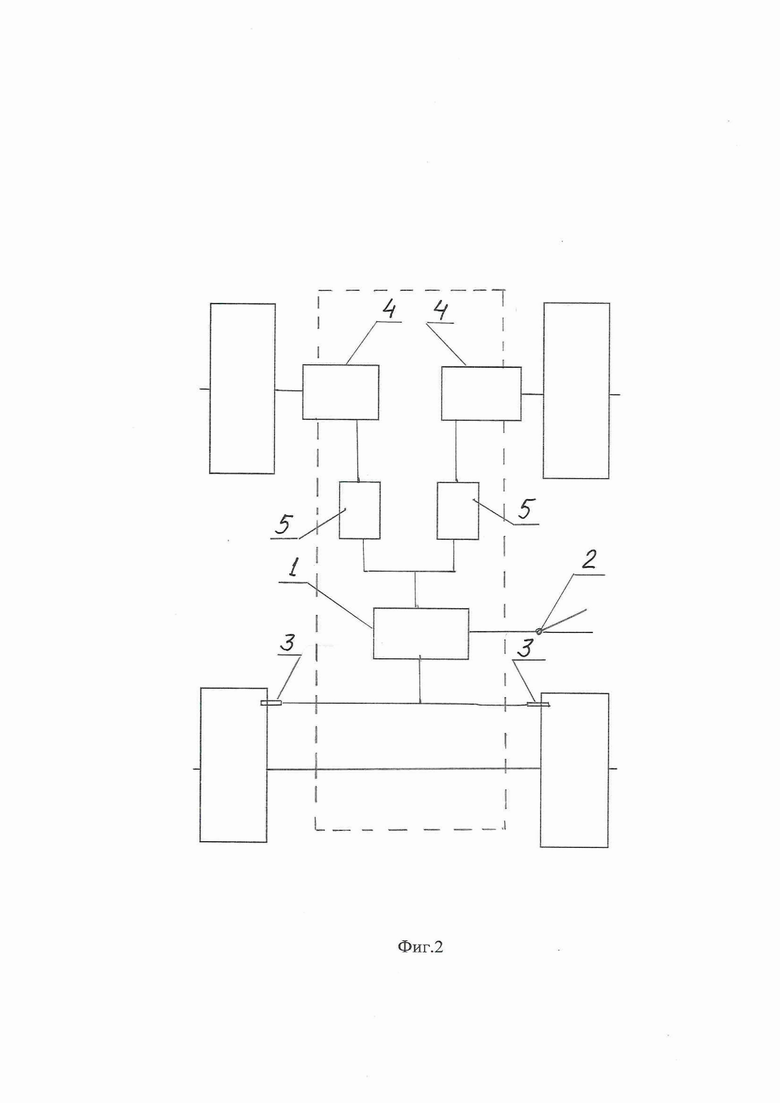
Фиг. 2 – Система управления движением с функцией управления с помощью одной педали хода, общий вид;
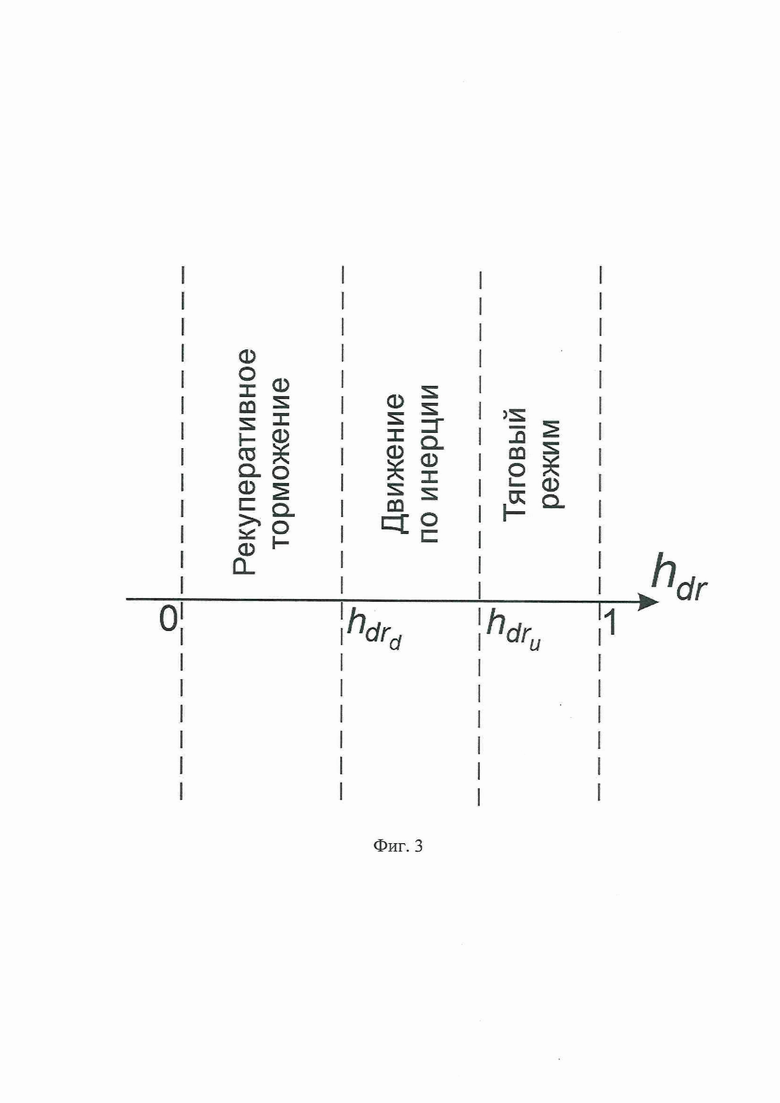
Фиг. 3 – Взаимное расположение зон тягового, рекуперативного (тормозного) и инерционного (накат) режимов движения в зависимости от степени нажатия на педаль хода;
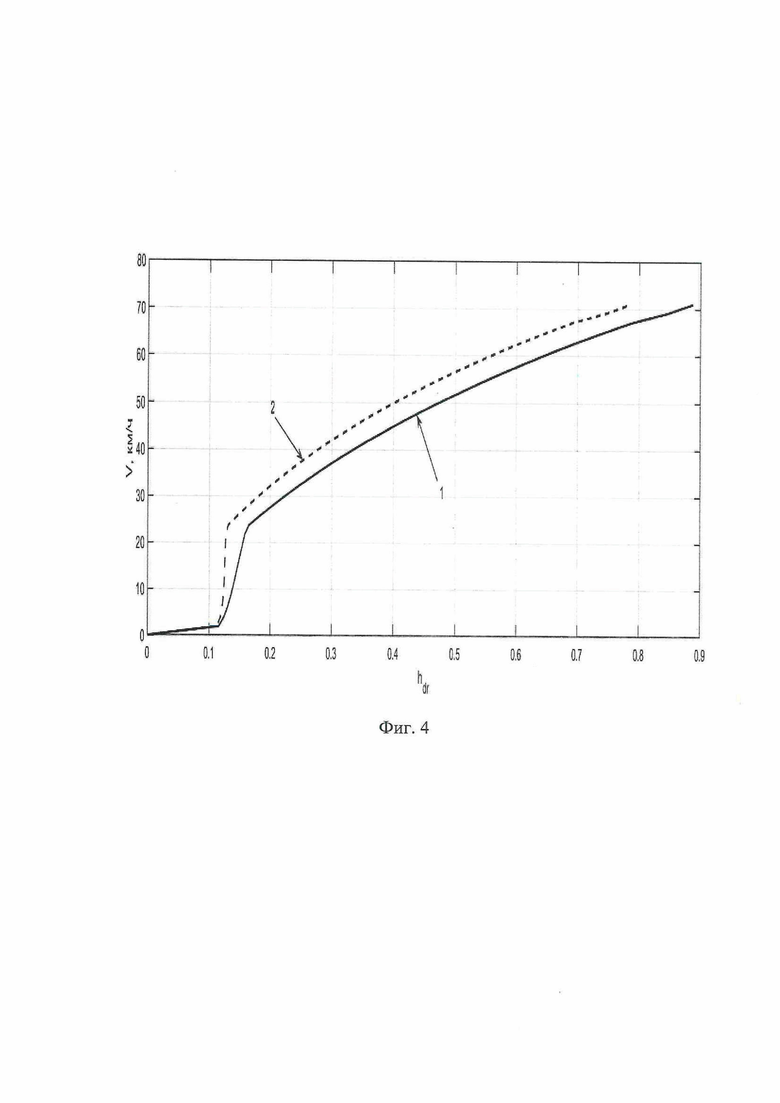
Фиг. 4 – Пример зависимости положения педали соответствующей правой граница зоны движения накатом (график 1) и положения педали соответствующей левой граница зоны движения накатом (график 2) от скорости движения для многоколёсного аккумуляторного транспортного средства;
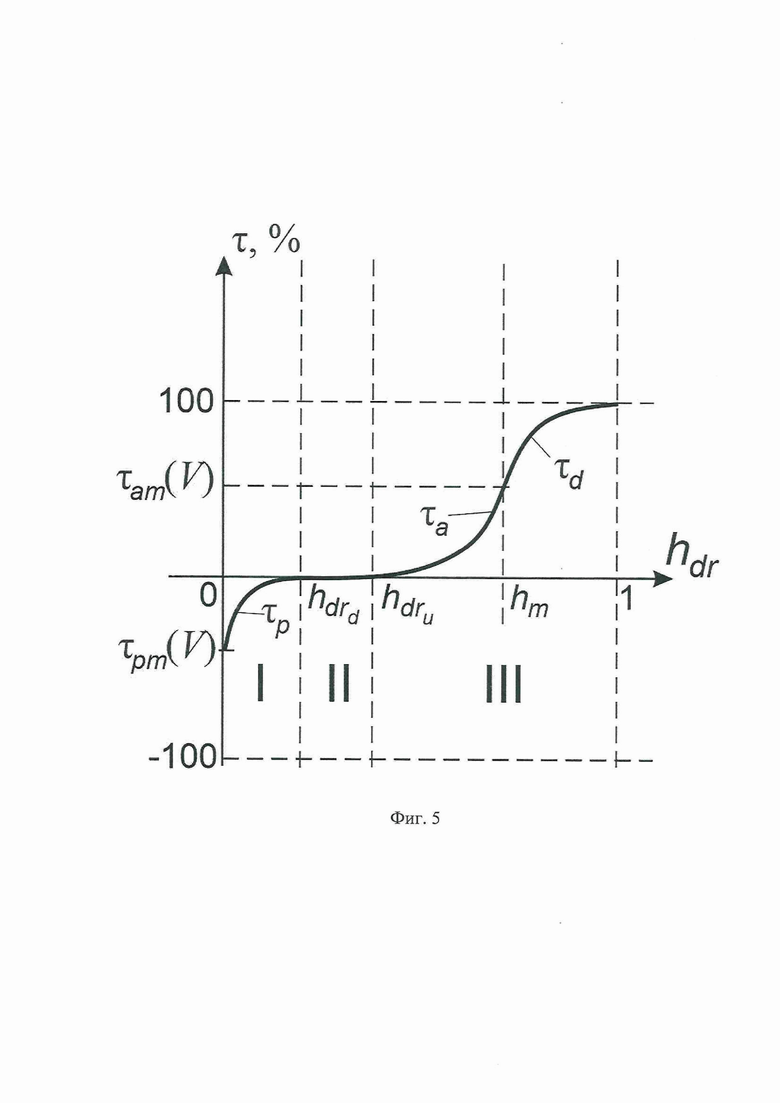
Фиг. 5 - График задания уставки крутящего момента на валу электродвигателя,
где:
τ – уставка крутящего момента в процентах от максимально доступного.
- уставка рекуперативного момента для тормозного режима;
-уставка крутящего момента в зоне тягового режима;
 - уставка крутящего момента для тягового режима работы соответствующая положению педали в зоне доступности максимального крутящего момента электродвигателя;
- уставка крутящего момента для тягового режима работы соответствующая положению педали в зоне доступности максимального крутящего момента электродвигателя;
 – максимальное значение рекуперативного момента;
– максимальное значение рекуперативного момента;
 – максимальное значение тягового момента;
– максимальное значение тягового момента;
 – положение педали акселератора, при котором становится доступным заказ максимального тягового момента.
– положение педали акселератора, при котором становится доступным заказ максимального тягового момента.
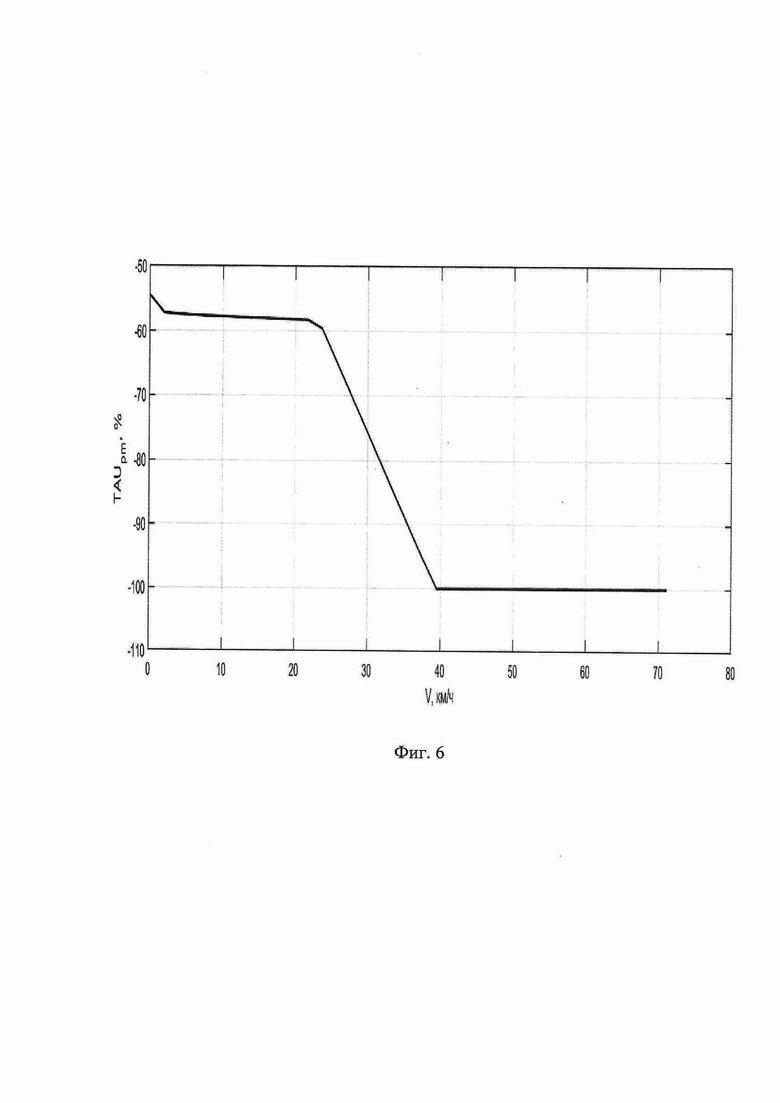
Фиг. 6 – Пример зависимости уставки максимального рекуперативного момента  от скорости движения;
от скорости движения;
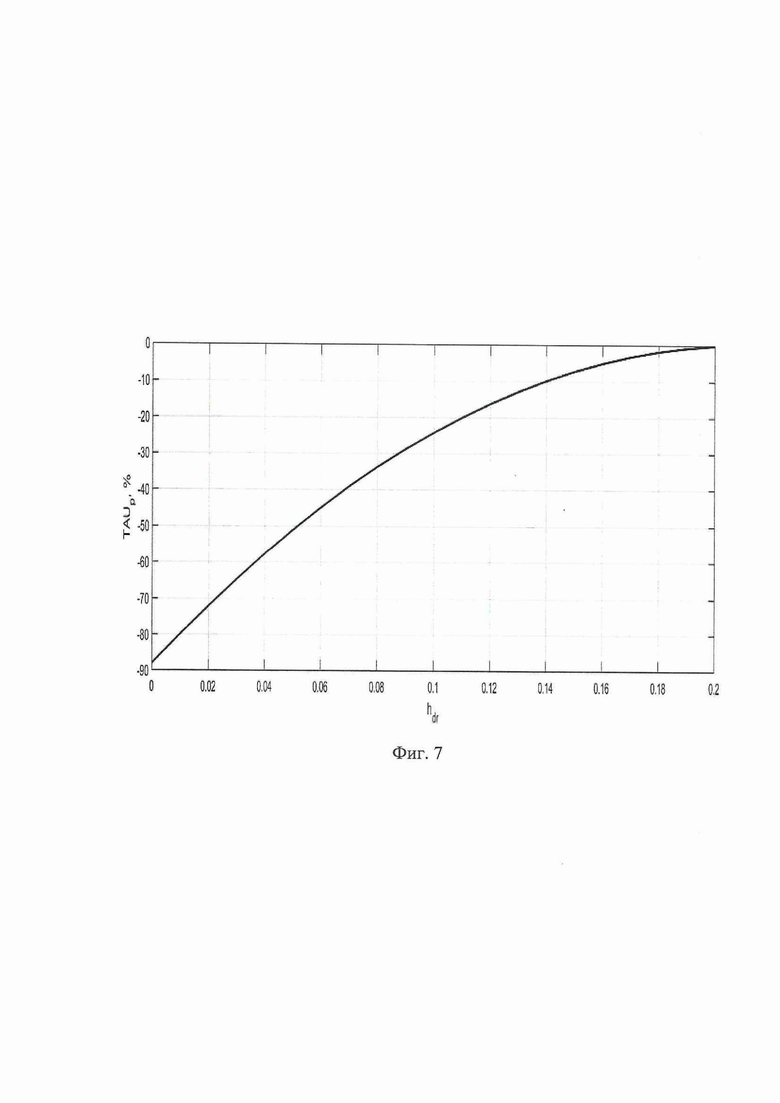
Фиг. 7 – Пример зависимости уставки момента рекуперации от положения педали  ,
,
где: для  ,
,  .
.
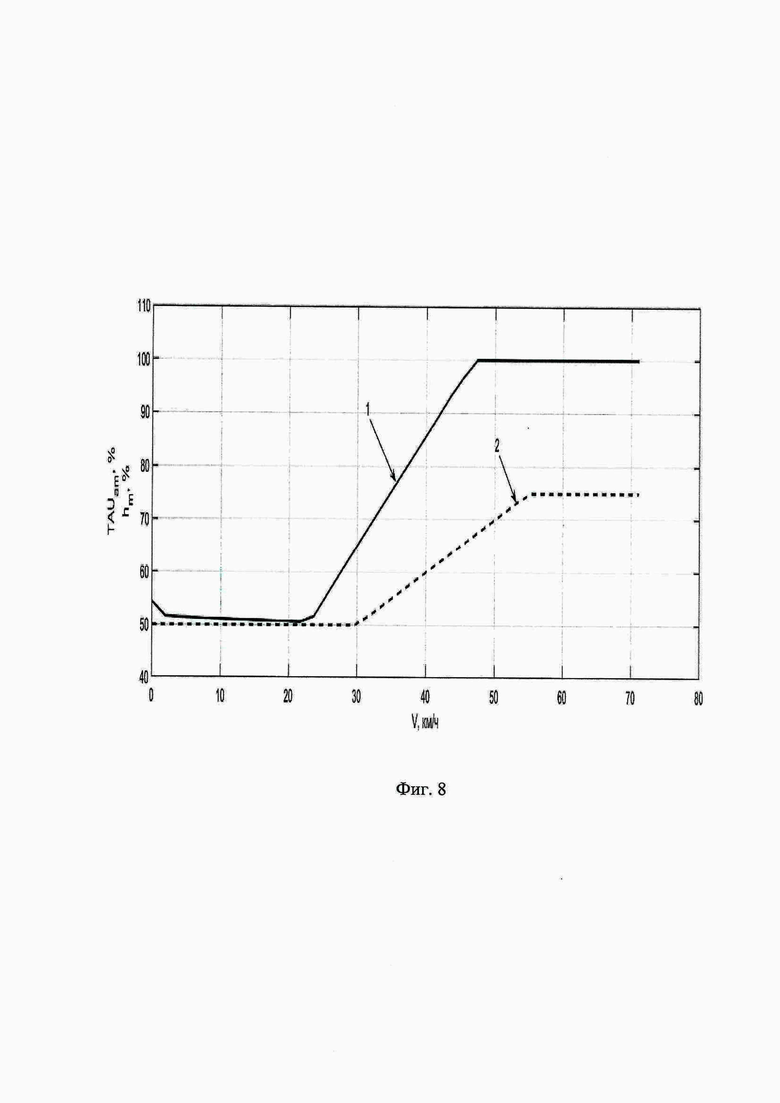
Фиг. 8 – Пример зависимости уставки крутящего момента и  (график 1) и положения педали, соответствующее максимальному крутящему моменту электродвигателя
(график 1) и положения педали, соответствующее максимальному крутящему моменту электродвигателя  (график 2) от скорости движения;
(график 2) от скорости движения;
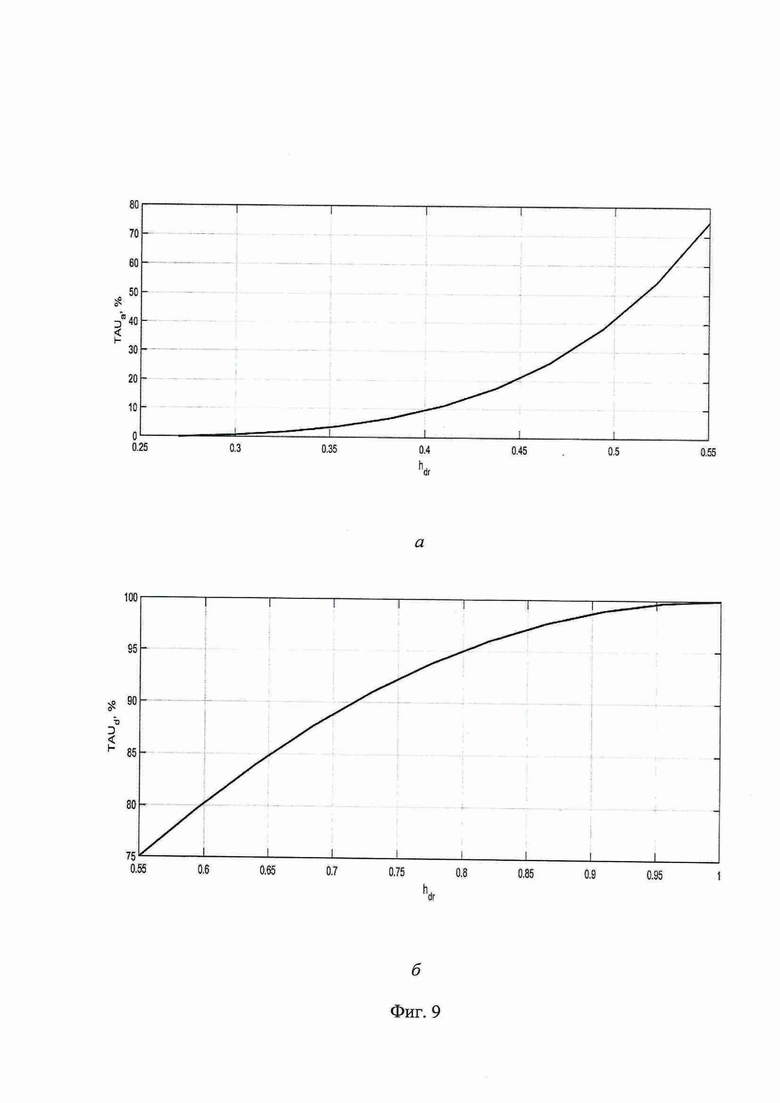
Фиг. 9 - Пример зависимости уставки крутящего момента  от положения педали ,
от положения педали ,
где: график а – зависимость уставки крутящего момента для зоны  ;
;
график б – зависимость уставки крутящего момента для зоны  .
.
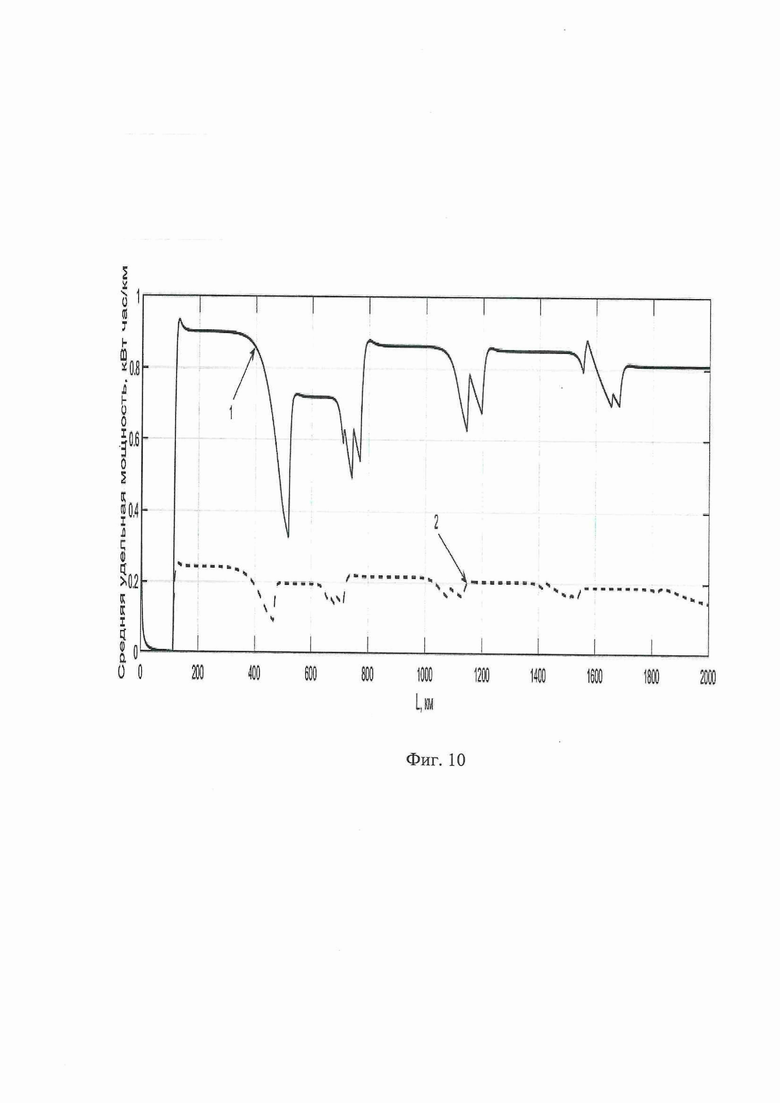
Фиг. 10 - Рекуперативная удельная мощность при движении в городском цикле за один километр пробега;
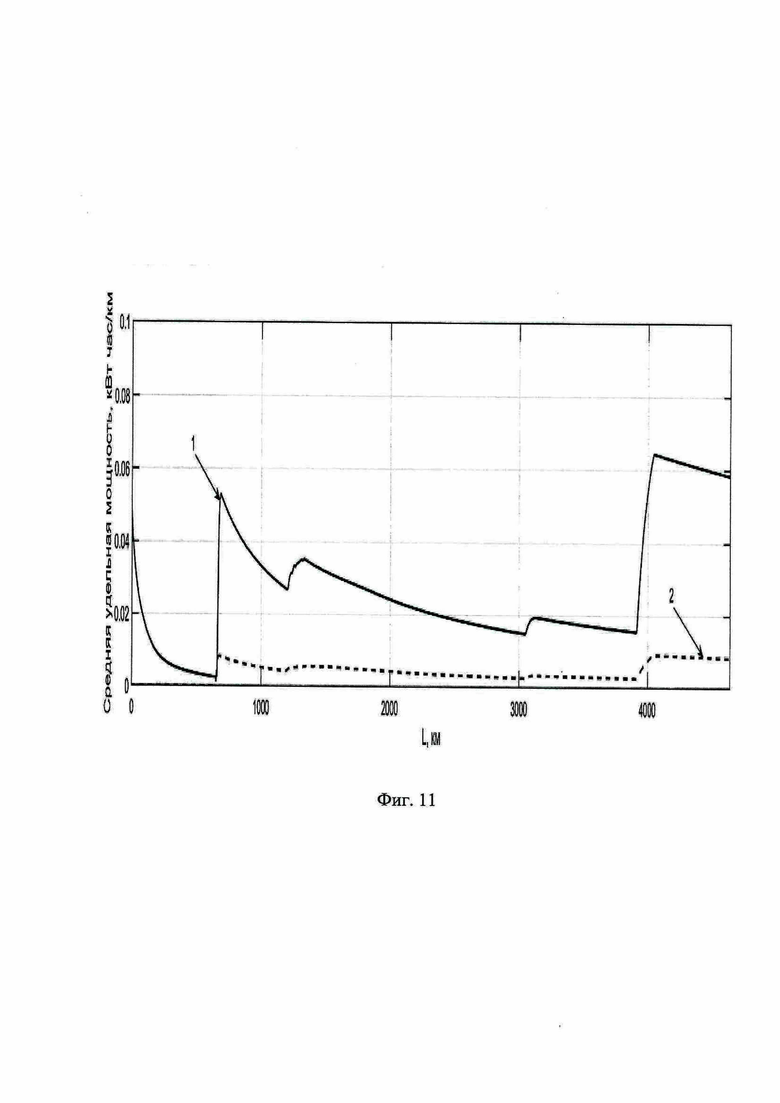
Фиг. 11 - Рекуперативная удельная мощность при движении в магистральном цикле за один километр пробега;
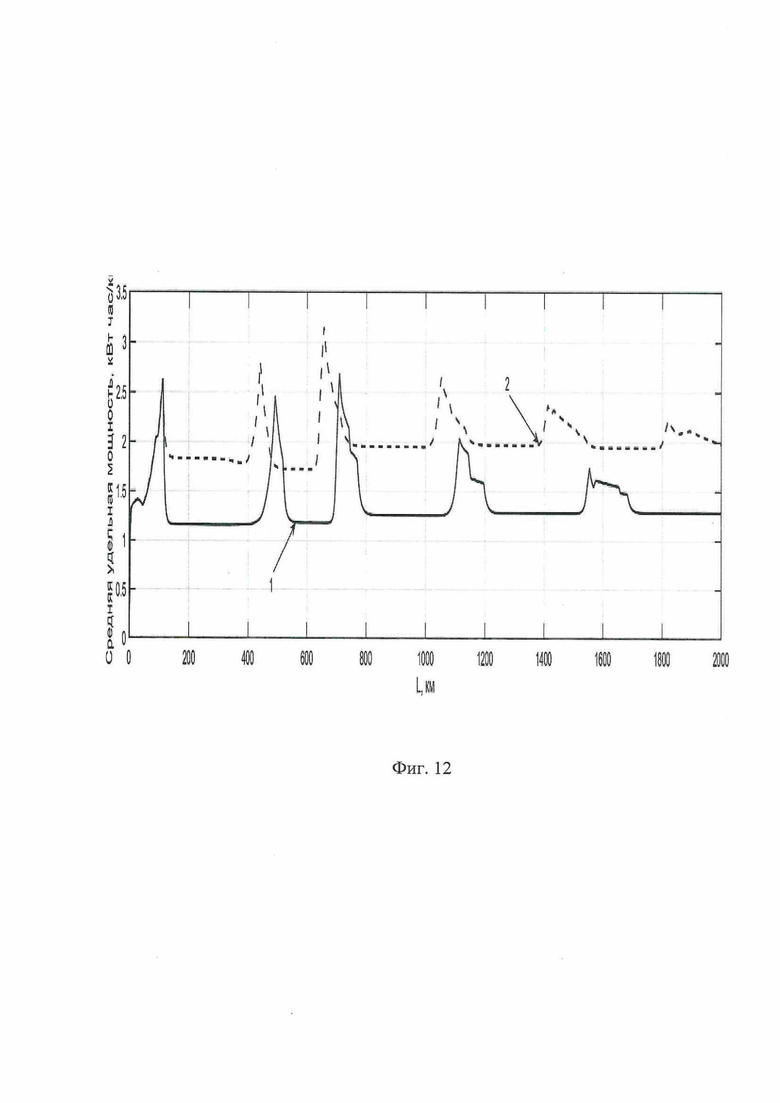
Фиг. 12 – Суммарная удельная мощность, затрачиваемая на движение в городском цикле за один километр пробега;
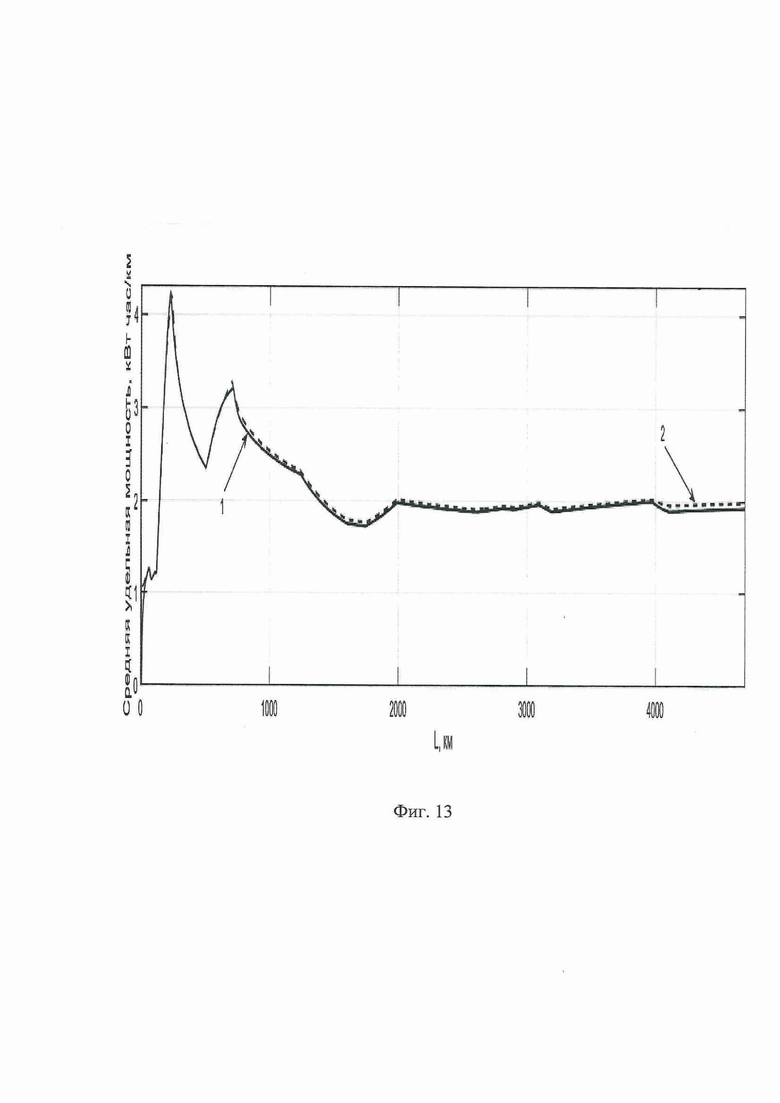
Фиг. 13 - Суммарная удельная мощность, затрачиваемая на движение в магистральном цикле за один километр пробега
Система управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода содержит блок 1 управления с программным обеспечением, осуществляющий реализацию способа однопедального управления замедлением и ускорением транспортного средства по сигналам о положении педали 2 хода, текущей скорости движения от датчиков 3 скорости, реализуемом и максимально возможном крутящем моменте электродвигателя от тягового автономного инвертора 4 напряжения, а также измеряя или рассчитывая момент сил сопротивления движению на колесе. Способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода возможен к применению на транспортных средствах с различной схемой привода: заднеприводной и переднеприводной.
Далее способ рассматривается на примере заднеприводного транспортного средства.
Блок 1 управления движением реализует способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода исходя из следующих исходных требований:
1) При нормальных условиях вождения водитель должен иметь возможность управлять ускорением и замедлением транспортного средства только с помощью педали акселератора.
2) Все рабочие замедления транспортного средства в реальных условиях должны осуществляться полностью за счет штатного рекуперативного торможения.
3) Транспортное средство в зависимости от типа электродвигателя в приводе должно иметь возможность полностью останавливаться без использования педали тормоза (например, на светофоре).
4) Водитель должен иметь возможность выбирать желаемый уровень замедления с помощью одной педали акселератора.
5) Педаль тормоза используется только в случае экстренного торможения.
6) При отпускании педали акселератора и первом нажатии на педаль тормоза замедление не должно изменяться скачкообразно.
7) Должен быть обеспечен режим движения накатом (крутящий момент на валу тягового электродвигателя равен нулю).
8) В системе должен быть предусмотрен активируемый водителем режим реализации запроса максимального крутящего момента при трогании с места (активируемый режим «Помощник трогания на подъеме»).
9) Стоп-сигналы при замедлении (включении рекуперативного режима торможения) должны загораться как при торможении с замедлениями на транспортном средстве, не имеющем алгоритма однопедального управления. Т.е. при выбеге стоп-сигналы не должны активироваться.
Расположение зон тягового, рекуперативного (тормозного) и инерционного (накат) режимов движения в зависимости от степени нажатия на педаль хода  должно быть таким, как показано на фиг. 3.
должно быть таким, как показано на фиг. 3.
В зоне тяги крутящий момент на валу электродвигателя
крутящий момент на валу электродвигателя  , в зоне
, в зоне  рекуперативного торможения
рекуперативного торможения  , в зоне
, в зоне  движения по инерции
движения по инерции  .
.
Для обеспечения плавного (без рывков) перехода из зоны тягового режима в зону движения по инерции необходимо границу между этими режимами располагать в окрестности нулевого продольного ускорения транспортного средства  . Пример зависимости и от скорости движения V для многоколёсного аккумуляторного транспортного средства показан на фиг. 4.
. Пример зависимости и от скорости движения V для многоколёсного аккумуляторного транспортного средства показан на фиг. 4.
Условием равномерного (без ускорения) движения будет равенство нулю углового ускорения  вала тягового электродвигателя:
вала тягового электродвигателя:

где: J – момент инерции вращающихся масс, приведенный к валу ТЭД;
положение педали хода;
 – максимальный доступный для текущего значения угловой скорости
– максимальный доступный для текущего значения угловой скорости  крутящий момент на валу ТЭД;
крутящий момент на валу ТЭД;
 – момент сопротивления, приведенный к валу ТЭД.
– момент сопротивления, приведенный к валу ТЭД.
Положение правой границы зоны движения по инерции (выбега) рассчитываем:

где:  – коэффициент сопротивления качению на скорости
– коэффициент сопротивления качению на скорости  ;
;
 – коэффициент аэродинамического сопротивления;
– коэффициент аэродинамического сопротивления;
 – площадь лобовой проекции электробуса;
– площадь лобовой проекции электробуса;
 – плотность воздуха;
– плотность воздуха;
M – оценка массы транспортного средства, которая может быть оценена наблюдателем по параметрам работы системы подрессоривания
Положение левой границы зоны движения по инерции рассчитываем:
где:  – максимальная скорость движения транспортного средства.
– максимальная скорость движения транспортного средства.
С целью снижения ударных динамических нагрузок, возникающих в зубчатых зацеплениях механической части тягового привода при перекладках в момент перехода между различными зонами (при пересечении границ или – вход или выход из зоны движения по инерции) алгоритм управления реализует значение крутящего момента равное нулю. То есть график задания крутящего момента при подходе к границам зоны должен иметь асимптоту τ = 0 (фиг. 5), где τ – уставка крутящего момента в процентах от максимально доступного.
Максимальная уставка рекуперативного момента определяется в зависимости от скорости движения.

где:  – число ведущих колес.
– число ведущих колес.
– значение максимального крутящего момента электродвигателя
 – радиус качения колеса;
– радиус качения колеса;
 – продольное ускорение транспортного средства;
– продольное ускорение транспортного средства;
М – масса транспортного средства;
– коэффициент сопротивления качению шин при скорости 
– коэффициент сопротивления воздуха;
– площадь лобового сечения;
 – текущая скорость транспортного средства;
– текущая скорость транспортного средства;
Максимальная уставка рекуперативного момента в зоне торможения учитывает параметры движения, а именно скорость транспортного средства, массу транспортного средства, характеристики опорного основания, а также требования потребителей в части динамики замедления (ограничение по максимальному замедлению машины), что влияет на комфорт движения. Это в особенности важно для пассажирских транспортных средств. С целью обеспечения максимального комфорта алгоритм однопедального управления ограничивает не только величину максимального ускорения, замедления, но и может ограничивать величину скорости изменения замедления и ускорения.  при пуске, трогании с места и
при пуске, трогании с места и  . Алгоритм управления позволяет реализовать в зависимости от скорости движения как максимально возможный крутящий момент электродвигателя при высоких скоростях (выше 40 км/ч), так и его снижение при более низких скоростях движения для обеспечения комфортного замедления (фиг. 6).
. Алгоритм управления позволяет реализовать в зависимости от скорости движения как максимально возможный крутящий момент электродвигателя при высоких скоростях (выше 40 км/ч), так и его снижение при более низких скоростях движения для обеспечения комфортного замедления (фиг. 6).
Зависимость уставки рекуперативного момента от положения педали хода для зоны торможения алгоритм определяет в виде квадратичного полинома
где: - уставка рекуперативного момента для тормозного режима;
a, b, c – коэффициенты полинома для расчёта уставки рекуперативного момента для режима торможения;
положение педали хода;
- положение педали соответствующее левой граница зоны движения накатом;
Для режима выбега уставка рекуперативного момента  (базовая рекуперация, при необходимости)
(базовая рекуперация, при необходимости)  ,
,  ,
,  или
или  (фиг. 7).
(фиг. 7).
Зависимость уставки крутящего момента для тягового режима  алгоритм управления рассчитывает в зависимости от параметров движения, характеристик транспортного средства и текущих возможностей привода (фиг. 8)
алгоритм управления рассчитывает в зависимости от параметров движения, характеристик транспортного средства и текущих возможностей привода (фиг. 8)

где:
 – положение педали хода соответствующее максимальному тяговому крутящему моменту электродвигателя.
– положение педали хода соответствующее максимальному тяговому крутящему моменту электродвигателя.
– значение максимального крутящего момента электродвигателя
– радиус качения колеса
– продольное ускорение транспортного средства
М – масса транспортного средства
– коэффициент сопротивления качению шин при скорости
– коэффициент сопротивления воздуха
– площадь лобового сечения
– текущая скорость транспортного средства
Благодаря введению дополнительной границы нет необходимости использовать полный ход педали хода, чтобы получать максимальное ускорение разгона, что позволяет обеспечить требуемую динамику движения транспортного средства. В этом случае, если активирована в системе управления верхнего уровня функция «Помощь на подъёме», при полном (100%) нажатии на педаль на малой или нулевой скорости алгоритм управления реализует максимально возможный крутящий момент.
В зоне тягового режима система управления рассчитывает уставку крутящего момента  согласно полинома (фиг. 9)
согласно полинома (фиг. 9)
где:
- уставка крутящего момента в зоне тягового режима;
d, e, f – коэффициенты полинома для расчёта уставки тягового момента для тягового режима;
положение педали хода;
- положение педали соответствующее правой граница зоны движения накатом;
На правой границе режима выбега  (базовая рекуперация, при необходимости) или
(базовая рекуперация, при необходимости) или  при отсутствии,
при отсутствии,  – уставка крутящего момента соответствующая положению педали
– уставка крутящего момента соответствующая положению педали  , n = 2.
, n = 2.
С учётом обеспечения безударного перехода между режимами и отсутствия толчков и избыточных ускорений (замедлений)  .
.

- Положение правой границы зоны движения по инерции (выбега)
– положение педали хода соответствующее максимальному тяговому крутящему моменту электродвигателя.
– уставка крутящего момента соответствующая положению педали
n – показатель степени полинома
или
В зоне тягового режима при положении педали хода более чем вплоть до полного 100% нажатия  алгоритм однопедального управления системы рассчитывает уставку крутящего момента по зависимости в виде квадратичного полинома
алгоритм однопедального управления системы рассчитывает уставку крутящего момента по зависимости в виде квадратичного полинома

где:
- уставка крутящего момента для тягового режима работы соответствующая положению педали в зоне доступности максимального крутящего момента электродвигателя;
k, l, m – коэффициенты полинома для расчёта уставки рекуперативного момента для тягового режима с возможностью реализации максимального крутящего момента электродвигателя;
положение педали хода;
Наличие в алгоритме зоны  позволяет увеличить безопасность движения, так как реакция привода на высоких скоростях на небольшие изменения положения педали хода становится более мягкой, что исключает резких изменений крутящего момента и скорости движения.
позволяет увеличить безопасность движения, так как реакция привода на высоких скоростях на небольшие изменения положения педали хода становится более мягкой, что исключает резких изменений крутящего момента и скорости движения.
При использовании системы формирования управляющего сигнала со стороны педали хода удельные затраты энергии для городских условий эксплуатации снижаются на 17…35% (фиг. 12, 13), для междугородней эксплуатации – на 7…10% в расчёте на один километр пройденного пути по сравнению с работой способа с прямым управлением моментом тяговых электродвигателей. В этом удельная мощность рекуперации в среднем на 300% выше (фиг. 14, 15), чем у алгоритма с прямым управлением моментом тяговых электродвигателей в расчете на один километр пройденного пути как для городских, так и для междугородних режимов эксплуатации. Следовательно, более эффективное использование рекуперативного торможения приводит к тому, что рабочая тормозная система будет задействована в основном только для экстремального торможения, что случается крайне редко для рейсового транспорта и это приведет к существенной экономии ресурса рабочей тормозной системы.
Система управления индивидуальным тяговым электрическим приводом с функцией управления с помощью одной педали хода может быть интегрирована в существующие системы управления и не требует их переделки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства | 2023 |
|
RU2797069C1 |
| Способ управления приводом электромобиля и устройство для его осуществления | 2018 |
|
RU2709639C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2575843C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2693424C1 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕКУПЕРАТИВНЫМ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2671429C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627238C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ/ТЯГОВЫМ УСИЛИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2372227C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2699204C1 |
Изобретение относится к транспортному машиностроению. В способе управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода формируют уставки крутящего и рекуперативного моментов на валу тягового электродвигателя. По сигналам датчиков определяют текущую скорость транспортного средства, текущее положение педали хода, рассчитывают положение границ зон: тягового режима, режима движения по инерции, тормозного режима, правой границы зоны наката и левой границы зоны наката, и непрерывно корректируют требуемое продольное ускорение или замедление транспортного средства после изменения положения педали хода путём корректировки уставки тягового и рекуперативного момента электродвигателя. Повышается энергоэффективность транспортного средства. 13 ил.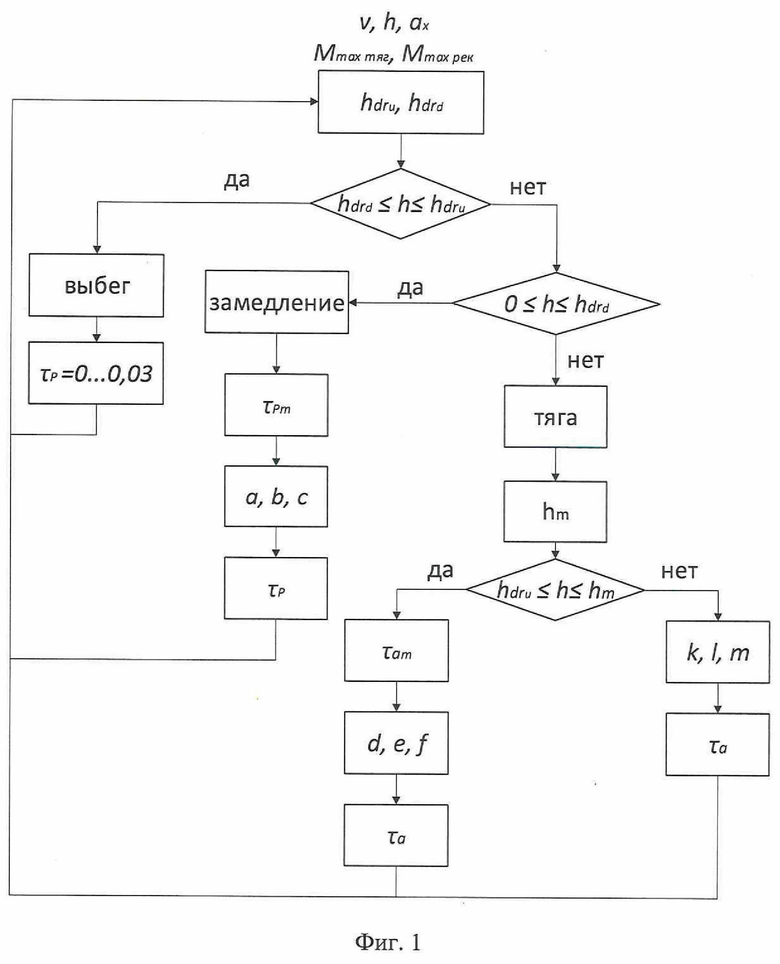
Способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода путем формирования уставок крутящего и рекуперативного моментов на валу тягового электродвигателя, при котором:
блок управления, по сигналам датчиков, определяет текущую скорость транспортного средства, текущее положение педали хода, рассчитывает положение границ зон: тягового режима, режима движения по инерции, тормозного режима, правой границы зоны наката и левой границы зоны наката и непрерывно корректирует требуемое продольное ускорение или замедление транспортного средства после изменения положения педали хода путём корректировки уставки тягового и рекуперативного момента электродвигателя;
при этом, если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента будет равна нулю, то блок управления реализует генерацию команд для осуществления режима движения по инерции;
если измеренное положение педали хода находится в диапазоне значений больше левой границы наката и меньше правой границы наката и уставка рекуперативного момента соответствует алгоритму с повышенной энергоэффективностью, то блок управления реализует генерацию команд для осуществления режима базового рекуперативного момента с целью увеличения энергоэффективности;
если измеренное положение педали не соответствует диапазону больше левой границы наката и меньше правой границы наката, то возможно реализовать тяговый или рекуперативный режим движения;
причем, если измеренное положение педали находится в диапазоне значений больше нуля и меньше или равно правой границе наката, то блок управления рассчитывает максимально возможную уставку рекуперативного момента, определяет коэффициенты, необходимые для расчета требуемой уставки рекуперативного момента, рассчитывает требуемую уставку рекуперативного торможения и реализует генерацию команд для осуществления режима замедления, при этом алгоритм обеспечивает плавный переход от рекуперативного режима к движению по инерции или базовой рекуперации и обратно;
если положение педали соответствует диапазону значений больше нуля, больше правой границы наката и меньше или равно правой границе тягового режима, в котором недоступен максимально возможный крутящий момент, блок управления рассчитывает максимально возможную уставку тягового момента, определяет коэффициенты, необходимые для расчета требуемой уставки тягового момента, рассчитывает требуемую уставку и реализует генерацию команд для осуществления режима движения, необходимого для реализации ускорений в эксплуатации транспортного средства, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно;
если положение педали не соответствует диапазонам значений больше правой границы наката, больше нуля, больше правой границы зоны тягового режима, в котором недоступен максимально возможный крутящий момент, соответствующий работе в наиболее вероятных эксплуатационных режимах и меньше или равно единице (полное нажатие) одновременно, блок управления генерирует сигналы для реализации максимально возможного крутящего момента для трогания транспортного средства с места, при этом алгоритм обеспечивает плавный переход от режима базовой рекуперации или движения по инерции и обратно.
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2699204C1 |
| US 9114726 B2, 25.08.2015 | |||
| US 20100004808 A1, 07.01.2010 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРЕКРАЩЕНИЕМ МЕДЛЕННОГО ПЕРЕДВИЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2524322C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2020 |
|
RU2785934C1 |
| ЦИЛИНДРОВАЯ СИСТЕМА С ВНУТРЕННИМ УСТРОЙСТВОМ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ | 2019 |
|
RU2785595C2 |
