Изобретение относится к транспортному машиностроению, а именно к многоколёсным автотранспортным средствам, в том числе аккумуляторным электрическим пневмоколёсным транспортным средствам, и может быть использовано в их конструкции.
Известен способ предупреждения боксования и юза колёсных пар и подавления фрикционных автоколебаний в кинематической цепи рельсовых транспортных средств с асинхронным тяговым двигателем с помощью которого осуществляется непрерывная коррекция амплитуды питающего напряжения в функции средней скорости скольжения колеса с целью исключения повышенного скольжения и подавления колебаний силы сцепления между колесом и рельсом. Данный способ описан для тяговых электроприводов с асинхронными электродвигателями (см. RU № 2 270 766 C2, МПК B60L, опубл. 27.06.2006г.).
Недостатки известного способа заключаются в сравнительно невысокой энергоэффективности и надежности тягового привода по причине того, что известный способ не позволяет учитывать криволинейность траектории движения транспортного средства (радиус поворота) и изменение частот вращения и крутящего момента между колёсами внутреннего и внешнего борта относительно центра поворота. Алгоритм не позволяет учитывать механические характеристики привода, такие как момент инерции и угловую жёсткость, а также характеристики самого транспортного средства и применяется только для асинхронного тягового электрического привода. Известный способ основан на оценке скольжения колеса по значению относительной скорости скольжения колеса, которая зависит от величины линейной скорости транспортного средства, что влияет на качество управления и снижения автоколебательных режимов. Кроме этого, ввиду отсутствия в управлении релейной функции, возможно возникновение автоколебательного процесса в контуре управления.
За прототип, по совокупности существенных признаков, принимаем способ управления тяговым электроприводом многоколесного транспортного средства обеспечивающий неравномерное распределение крутящих моментов по ведущим колёсам транспортного средства с целью наиболее полной реализации сцепных свойств колёсного движителя, минимизации его проскальзывания на деформируемом опорном основании с помощью задания различных значений подводимых крутящих моментов за счёт различных уставок абсолютного скольжения и соотношения  к электрической частоте электродвигателя для различных ведущих колёс. Данный способ описан для тяговых электроприводов с асинхронными электродвигателями, но может быть использован также для приводов с синхронными электродвигателями как для деформируемого, так и недеформируемого опорного основания (см. RU №2 483 950, опубл. 10.06.2013 г.).
к электрической частоте электродвигателя для различных ведущих колёс. Данный способ описан для тяговых электроприводов с асинхронными электродвигателями, но может быть использован также для приводов с синхронными электродвигателями как для деформируемого, так и недеформируемого опорного основания (см. RU №2 483 950, опубл. 10.06.2013 г.).
Недостатки прототипа заключаются в сравнительно невысокой энергоэффективности и надежности по причине отсутствия реакции на появление автоколебательных явлений в зоне контакта пневматической шины с опорным основанием при её скольжении и вертикальных перемещениях колеса при движении по неровному основанию. Возникновение автоколебаний приводит к снижению энергоэффективности движения вследствие повышенного расхода энергии из-за возникновения данного явления, снижения безопасности движения, а также к увеличению динамических нагрузок в механическом приводе вплоть до поломок, крутильным колебаниям, приводящим к колебаниям угла нагрузки θ, возникновению асинхронных моментов, вызывающих снижение эффективности привода. При определённых значениях угла нагрузки двигатель при зарождении колебаний и значительной их интенсивности может выйти из устойчивого состояния. Данное явление также вызывает колебания тока и напряжения статора, что усложняет управление двигателем. Кроме этого, ввиду отсутствия в управлении релейной функции, возможно возникновение автоколебательного процесса в контуре управления.
Предлагаемым изобретением решается задача подавления автоколебательных явлений при их зарождении, что позволяет повысить энергоэффективность, безопасность и надёжность индивидуального тягового электропривода колеса.
Указанный результат достигается за счёт осуществления способа управления тяговыми электродвигателями для индивидуального электропривода ведущих колёс транспортного средства, включающий получение данных от датчиков, согласно которым блок управления задает величины параметров тяговых электродвигателей, регулируемых по определенному алгоритму, который, в соответствии с заявляемым изобретением, дополнен функцией импульсного подавления автоколебаний для тягового и тормозного режима работы индивидуального тягового электрического привода, как при прямолинейном, так и при криволинейном движении, осуществляемой по сигналам от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода и силы тока в любых 2 фазах тяговых электродвигателей.
Совокупность отличительных признаков способа управления индивидуальным тяговым электроприводом ведущих колёс многоколёсного транспортного средства, заключающийся в том, что «алгоритм дополнен функцией импульсного подавления автоколебаний для тягового и тормозного режима работы индивидуального тягового электрического привода, как при прямолинейном, так и при криволинейном движении по сигналам от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода и силы тока в любых 2 фазах тяговых электродвигателей» позволяет подавлять автоколебательные явления при их зарождении, что позволяет повысить энергоэффективность, безопасность и надёжность индивидуального тягового электропривода колеса.
Указанный результат достигается за счёт комплексного анализа информации от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода, силы тока в любых 2 фазах тяговых электродвигателей и определения добавок корректирующих демпфирующих моментов  для изменения целевых уставок моментов, реализуемых на ведущих колёсах как в ведомом, так и в тормозном режиме работы колеса, а также исключения нежелательного скольжения колёс, сопровождаемого отрицательным значением демпфирующей силы. Этот эффект возникает при тяговом и ведомом режиме в случае, когда с ростом скорости скольжения сила трения снижается, что вызывает «мягкий» режим автоколебаний, при тормозном режиме, когда с ростом скорости скольжения растёт сила трения, это сопровождается «жёстким» автоколебательным режимом.
для изменения целевых уставок моментов, реализуемых на ведущих колёсах как в ведомом, так и в тормозном режиме работы колеса, а также исключения нежелательного скольжения колёс, сопровождаемого отрицательным значением демпфирующей силы. Этот эффект возникает при тяговом и ведомом режиме в случае, когда с ростом скорости скольжения сила трения снижается, что вызывает «мягкий» режим автоколебаний, при тормозном режиме, когда с ростом скорости скольжения растёт сила трения, это сопровождается «жёстким» автоколебательным режимом.
Для достижения указанного результата устройство управления транспортным средством имеет электронный блок управления, реализующий диагностирование явления зарождения автоколебаний в системе индивидуального привода и рассчитывающий необходимые добавки демпфирующих моментов для изменения уставок тягового или рекуперативного момента реализуемых на ведущем колесе по информации от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода и силы тока в любых 2 фазах тяговых электродвигателей курсовой скорости движения транспортного средства при индивидуальном приводе.
Способ управления заключается в диагностировании зарождения автоколебаний составных частей привода колес при частичном и полном скольжении колеса в ведущем, ведомом и тормозном режиме работы колеса по диагностическим признакам проскальзывания колёс  и
и  , подавления этих процессов путём реализации уставок корректирующих демпирующих добавок моментов к реализации тяговых и рекуперативных моментов на колёсах, что позволяет повысить управляемость, траекторную устойчивость транспортного средства, энергоэффективность движения за счёт исключения скольжения, а также повысить надёжность при снижении динамических нагрузок привода.
, подавления этих процессов путём реализации уставок корректирующих демпирующих добавок моментов к реализации тяговых и рекуперативных моментов на колёсах, что позволяет повысить управляемость, траекторную устойчивость транспортного средства, энергоэффективность движения за счёт исключения скольжения, а также повысить надёжность при снижении динамических нагрузок привода.
В результате поиска по патентным и другим общедоступным источникам научно-технической информации способ управления индивидуальным тяговым электроприводом ведущих колес многоколёсного транспортного средства с указанной совокупностью существенных признаков обнаружен не был и совокупность существенных признаков не вытекает явным образом из современного уровня техники. Следовательно, можно предположить соответствие заявляемого технического решения условиям патентоспособности «новизна» и «изобретательский уровень».
Изобретение иллюстрируется чертежами, на которых представлены:
Фиг. 1 – Схема расположения датчиков;
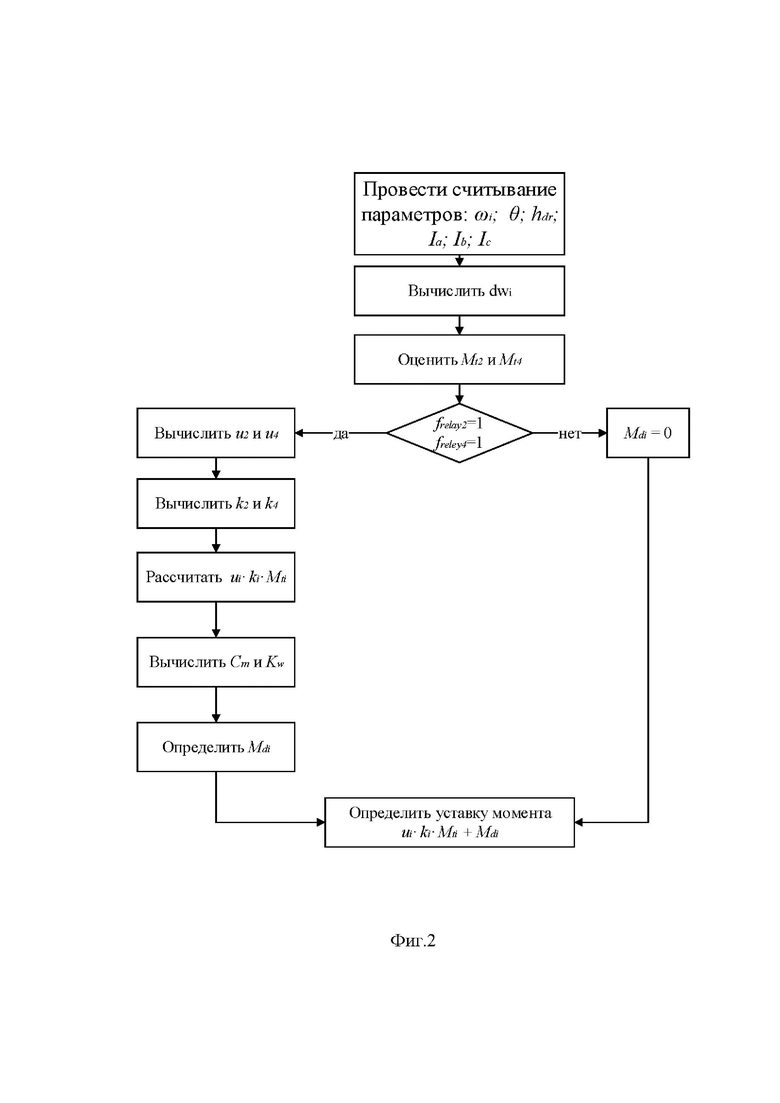
Фиг.2 - Блок-схема алгоритма функции подавления автоколебательных явлений;
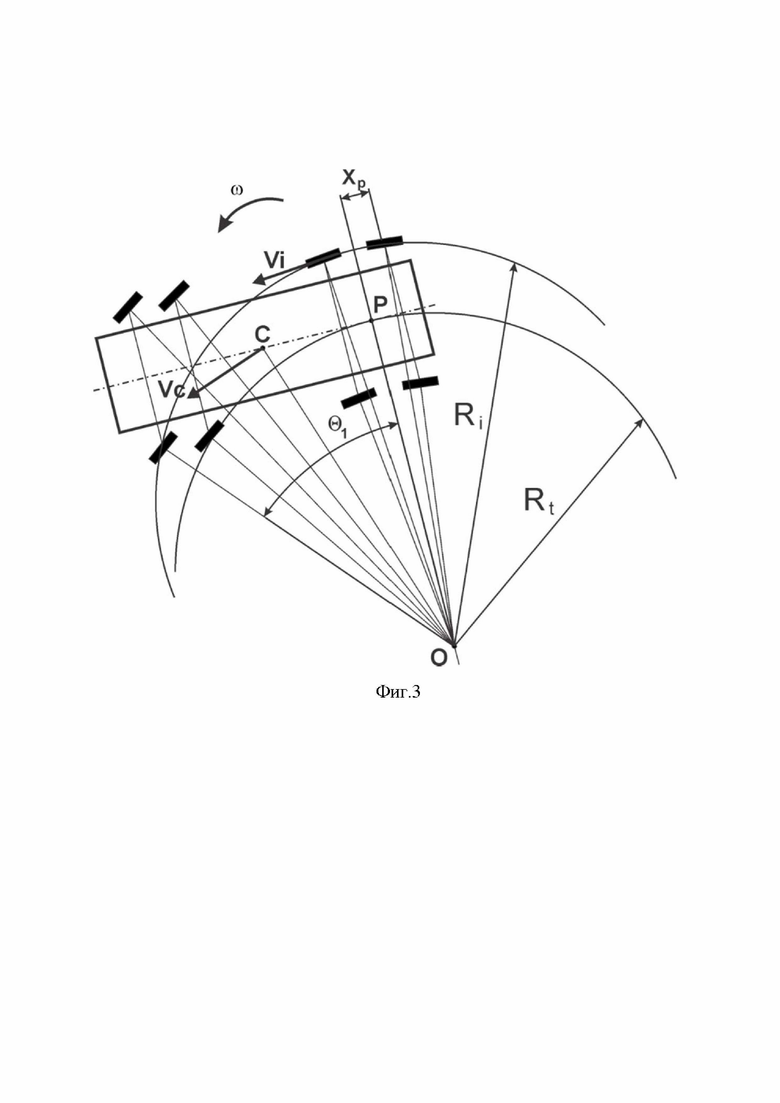
Фиг. 3 – Расчётная схема криволинейного движения транспортного средства, где: Р– полюс рулевого управления, С– центр масс, О– мгновенный центр поворота, Rt – радиус поворота, измеренный по полюсу рулевого управления, Ri – радиус поворота по i-му колесу, Vi – линейная скорость движения центра i-го колеса, ɷ – угловая скорость поворота транспортного средства;  – расстояние между полюсом рулевого управления и задней осью машины;
– расстояние между полюсом рулевого управления и задней осью машины;  – угол поворота i-го управляемого колеса;
– угол поворота i-го управляемого колеса;
Фиг. 4 – Расчётная схема взаимодействия эластичного колеса с твёрдым опорным основанием, где: 1 – масса М подрессоренных частей автомобиля, приходящаяся на колесо; 2 – масса m колеса; 3 – ролики; 4 – упругий элемент, характеризующий податливость шины в продольном направлении; 5 – опорное основание; 6 – вращающееся колесо; 7 – тяговый электродвигатель; с – жесткость пружины;  – продольные перемещения масс 1 и 2 соответственно;
– продольные перемещения масс 1 и 2 соответственно; – сила трения, зависящая от скорости
– сила трения, зависящая от скорости  скольжения колеса относительно опорного основания;
скольжения колеса относительно опорного основания; – угловая скорость вращения колеса;
– угловая скорость вращения колеса;  – расстояние от центра колеса до опорного основания;
– расстояние от центра колеса до опорного основания;  – крутящий или тормозной момент, развиваемый тяговым электродвигателем;
– крутящий или тормозной момент, развиваемый тяговым электродвигателем;  –угловая «электромагнитная жесткость» тягового синхронного электродвигателя с постоянными магнитами;
–угловая «электромагнитная жесткость» тягового синхронного электродвигателя с постоянными магнитами;  – момент инерции вращающихся частей электродвигателя, приведенный к ротору
– момент инерции вращающихся частей электродвигателя, приведенный к ротору
Фиг. 5 - Релейная функция;
Фиг. 6 -График электромагнитных моментов тяговых при разгоне на сухом асфальте в повороте налево, где: а) – без ПБС; б) – с ПБС без функции подавления автоколебаний; в) – с ПБС и с функции подавления автоколебаний; 1 – левое заднее колесо; 2 – правое заднее колесо;
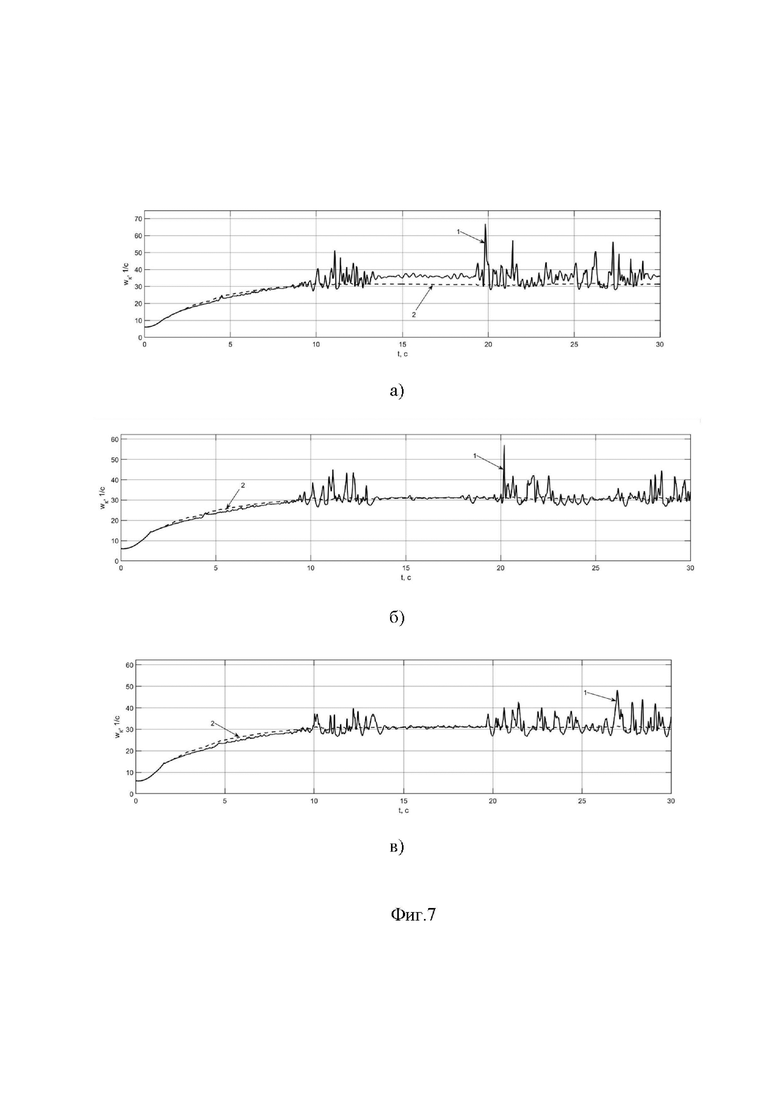
Фиг. 7 - График угловых скоростей ведущих колес электробуса при разгоне на сухом асфальте в повороте налево, где: а – без ПБС; б – с ПБС без функции подавления автоколебаний; в) – с ПБС и с функции подавления автоколебаний; 1 – левое заднее колесо; 2 – правое заднее колесо;
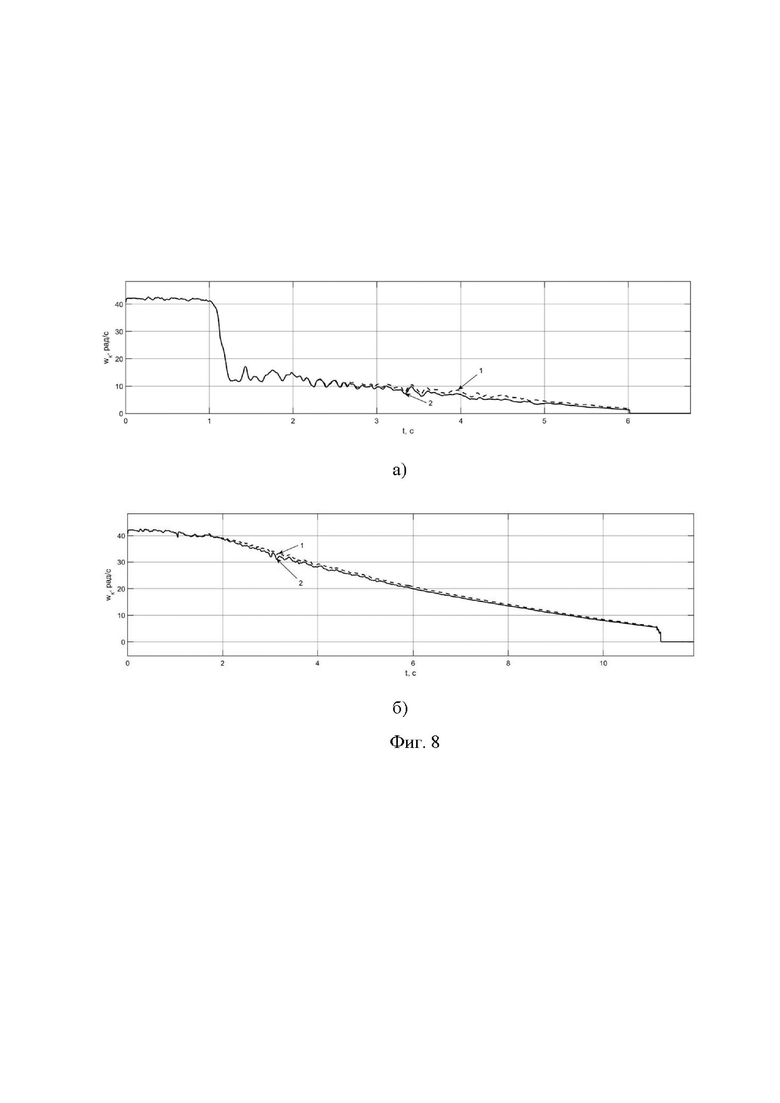
Фиг. 8 - График угловых скоростей ведущих колес электробуса при торможении с поворотом на льду со снегом, где: а) – обычная АБС; б) – АБС с функцией подавления автоколебаний; 1 – левое ведущее колесо, 2 – правое ведущее колесо;
Фиг. 9 - График суммарных тормозных моментов на ведущих колесах электробуса при торможении с поворотом на льду со снегом, где: а) – обычная АБС; б) – АБС с функцией подавления автоколебаний; 1 – левое ведущее колесо, 2 – правое ведущее колесо ;
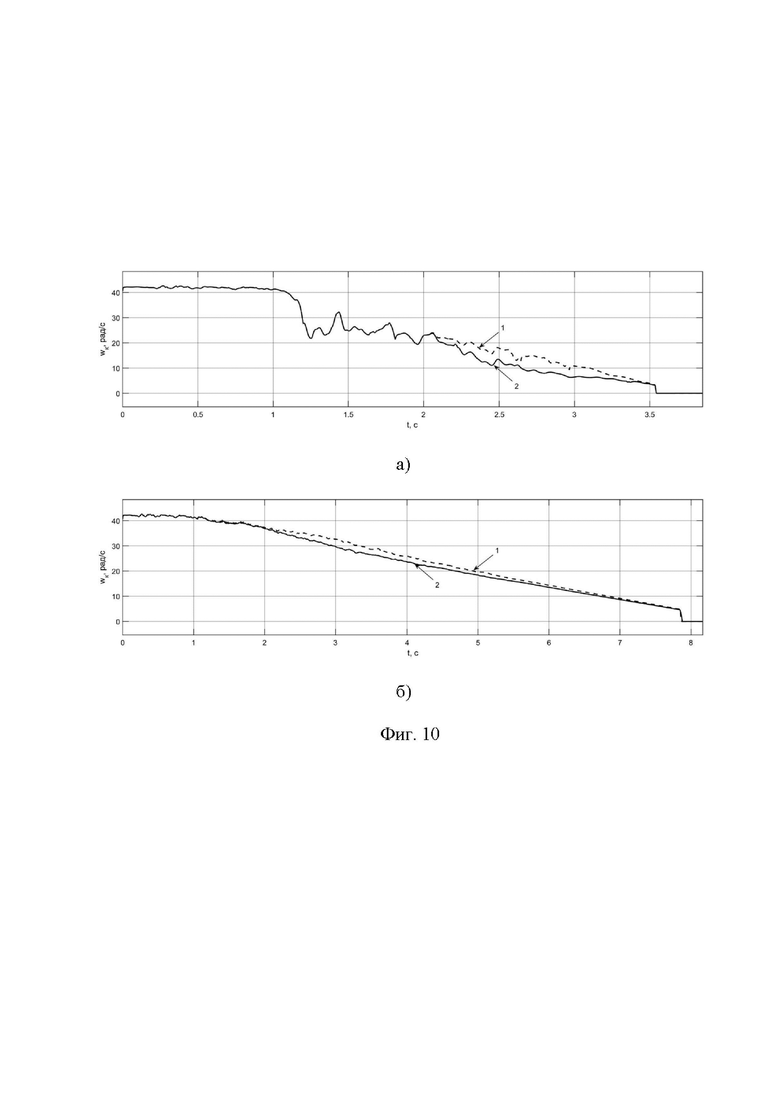
Фиг. 10 - График угловых скоростей ведущих колес электробуса при торможении с поворотом на асфальте, где: а) – обычная АБС; б) – АБС с функцией подавления автоколебаний; 1 – левое ведущее колесо, 2 – правое ведущее колесо;
Фиг. 11 - График суммарных тормозных моментов на ведущих колесах электробуса при торможении с поворотом на асфальте, где: а) – обычная АБС; б) – АБС с функцией подавления автоколебаний; 1 – левое ведущее колесо, 2 – правое ведущее колесо.
Управление индивидуальным тяговым электроприводом ведущих колес многоколёсного транспортного средства осуществляется следующим образом: блок 1 управления с программным обеспечением реализует алгоритм функции импульсного подавления автоколебаний по сигналам от датчиков 2 угловых скоростей вращения колёс, угла поворота рулевого колеса 3, положения педали 4 хода, силы тока в любых 2 фазах тяговых электродвигателей 5. Осуществляется управление как для заднеприводных, переднеприводных, так и полноприводных транспортных средств с индивидуальным электроприводом ведущих колёс, состоящим из непосредственно электродвигателя и механической трансмиссии.
Далее алгоритм функции рассмотрим на примере заднеприводного транспортного средства.
На основании сигналов от датчиков 2 угловой скорости колёс блок 1 управления определяет следующие характеристики для реализации алгоритма:
• скорость движения электробуса (на основании угловой скорости не ведущих колёс);
• характер движения электробуса - прямолинейное или криволинейное (на основании сравнения угловых скоростей не ведущих колёс);
• проскальзывание ведущих колёс (на основании разности угловых скоростей ведущих и не ведущих колёс).
В зависимости от текущего значения измеренных и определенных эксплуатационных характеристик производится управление крутящим моментом тягового электродвигателя соответствующего колеса.
Реализация алгоритма управления заключается в решении системы дифференциальных уравнений:
Где: индекс «2» относится к левому ведущему колесу, индекс «4» - к правому;  – уставки крутящих моментов тяговых электродвигателей для левого и правого ведущих колес соответственно (в соответствии с запросом педали акселератора
– уставки крутящих моментов тяговых электродвигателей для левого и правого ведущих колес соответственно (в соответствии с запросом педали акселератора  );
);
u 2, u4 – управляющие сигналы для ведущих колес;
k2, k4 – коэффициенты коррекции, позволяющие учесть перераспределение тормозного момента при криволинейном движении;
 – моменты сопротивления качению на ведущих колесах;
– моменты сопротивления качению на ведущих колесах;
 – демпфирующие моменты, подавляющие автоколебания;
– демпфирующие моменты, подавляющие автоколебания;
 – ускорение ведущих колёс.
– ускорение ведущих колёс.
Управляющие сигналы u2 и u4 вычисляются по следующим зависимостям:
 ;
;
 .
.
Где: где  – угловая скорость ведущих задний колёс;
– угловая скорость ведущих задний колёс;
 – угловая скорость управляемых передних колёс.
– угловая скорость управляемых передних колёс.
индекс «1» относится к левому не ведущему колесу, индекс «3» - к правому.
Коэффициенты коррекции k2 и k4 определяются исходя из соображения, что тормозной момент на буксующих ведущих колесах при криволинейном движении перераспределен пропорционально значениям угловых скоростей колёс не ведущей оси:
 ;
;
Алгоритм способа управления индивидуальным тяговым электроприводом ведущих колес многоколёсного транспортного средства с функцией подавления автоколебаний заключается в повторении следующих операций в соответствии с расчётной схемой:
1) Провести считывание с датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода, силы тока в любых 2 фазах тяговых электродвигателей
2) Вычислить диагностические признаки буксования  и
и  .
.
Теоретическая эталонная частота вращения  вращения i-го колеса транспортного средства определяется из выражения
вращения i-го колеса транспортного средства определяется из выражения 
Где: – радиус качения колеса (с достаточной для данной задачи точностью принимается равным статическому радиусу);
 - коэффициент изменения угловой скорости колеса при криволинейном движении,
- коэффициент изменения угловой скорости колеса при криволинейном движении,
 ,
,
где  - радиус поворота, измеренный по полюсу рулевого управления;
- радиус поворота, измеренный по полюсу рулевого управления;

Где:  - радиус поворота, измеренный по полюсу рулевого управления;
- радиус поворота, измеренный по полюсу рулевого управления;
 ,
,
Где: B – колея;
L – база;
– расстояние между полюсом рулевого управления и задней осью машины;
– угол поворота i-го управляемого колеса;
 – расстояние между полюсом рулевого управления и j-ой осью машины;
– расстояние между полюсом рулевого управления и j-ой осью машины;
ɷр - частота вращения условного "эталонного колеса", расположенного таким образом, что его центр совпадает с полюсом рулевого управления.
3) Определить релейные функции  и
и  , введение которых необходимо для снижения вероятности возникновения автоколебательного процесса в контуре управления для левого и правого ведущих колёс.
, введение которых необходимо для снижения вероятности возникновения автоколебательного процесса в контуре управления для левого и правого ведущих колёс.
4) Провести оценку значений крутящих моментов  для левого и правого тяговых электродвигателей, рассчитываемых автономными инверторами напряжения управляющими электродвигателями.
для левого и правого тяговых электродвигателей, рассчитываемых автономными инверторами напряжения управляющими электродвигателями.
5) Если значение релейной функции  или
или  :
:
вычислить управляющие сигналы u2 или u4 и коэффициенты коррекции k2 или k4;
рассчитать требуемый крутящий момент для левого  или правого
или правого  ведущих колес;
ведущих колес;
Вычислить угловые жесткости  и
и 
где приращения оценок электромагнитного крутящего моментов  и угловой скорости колес
и угловой скорости колес  ;
;  – текущий и предыдущий моменты времени.
– текущий и предыдущий моменты времени.
Вычислить значения  и
и 
 – коэффициенты демпфирования, вязкого трения
– коэффициенты демпфирования, вязкого трения  .
.
Вычислить демпфирующие моменты подавляющие автоколебания  или
или  аналогичные моментам вязкого трения
аналогичные моментам вязкого трения  .
.
6) Если  , то
, то  или если
или если  , то
, то  .
.
7) Сформировать уставки крутящих моментов  для левого тягового электродвигателя и
для левого тягового электродвигателя и  для правого тягового электродвигателя.
для правого тягового электродвигателя.
Для пассажирского транспортного средства большого класса полной массой 18 тонн, оснащенного индивидуальным тяговым электрическим приводом задней оси, при разгоне с полностью нажатой педалью хода в повороте применение алгоритма подавления автоколебаний в системе управления позволило снизить пиковые значения всплесков реализаций крутящих моментов на 27,8% и для частот вращения электродвигателей на 66,7% по сравнению с системой управления не имеющей никакой противобуксовочной системой, на 15,5% для реализации частот вращения и на 28,6% для реализации крутящих моментов для системы управления оснащенной противобуксовочной системой, но без алгоритмов подавления автоколебаний. При этом сохраняются тягово-динамические характеристики транспортного средства, а также наиболее качественно выдерживается заданная водителем траектория движения.
При резком торможении с использованием известной антиблокировочной системы на скользкой опорной поверхности возникают автоколебательные процессы вращения колес и тормозных моментов, что приводит к ухудшению условий сцепления колес с опорной поверхностью и снижению управляемости и траекторной устойчивости. В результате электробус не может совершить полноценный маневр уклонения от столкновения при торможении. В случае использования в тех же условиях системы с функцией подавления автоколебаний уровень автоколебаний угловых скоростей вращения колес снизился на 80%, уровень суммарных тормозных моментов на ведущих колесах снизился на 96%. Маневр уклонения при торможении удается выполнить в полном объёме, что свидетельствует о повышении управляемости и траекторной устойчивости электробуса с антиблокировочной системой с функцией подавления автоколебаний при торможении на скользких опорных поверхностях.
В случае использования способа с функцией подавления автоколебаний при торможении на асфальтовом покрытии уровень автоколебаний угловых скоростей вращения колес снизился на 98% (фиг. 11), уровень суммарных тормозных моментов на ведущих колесах снизился на 81% (фиг. 12). Маневр уклонения при торможении удается выполнить в полном объеме, что свидетельствует о повышении управляемости и траекторной устойчивости электробуса с антиблокировочной системой с функцией подавления автоколебаний при торможении на скользких опорных поверхностях.
Способ управления индивидуальным тяговым электроприводом ведущих колес многоколёсного транспортного средства успешно интегрирован в существующие системы управления и не требует их переделки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода | 2023 |
|
RU2799275C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Полноприводный автомобиль повышенной проходимости с электрическим приводом колёс | 2022 |
|
RU2786903C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ НА ГУСЕНИЧНОМ ХОДУ | 2005 |
|
RU2279370C1 |
| ГОРОДСКАЯ МАШИНА | 2013 |
|
RU2561188C2 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Способ производства энергии для питания электродвигателей и система для производства энергии | 2021 |
|
RU2764327C1 |






Изобретение относится к способу для управления тяговой системой транспортных средств с электротягой. Способ управления тяговыми электродвигателями для индивидуального электропривода ведущих колёс транспортного средства, заключающийся в том, что получают данные от датчиков, согласно которым блок управления задает величины регулируемых по определенному алгоритму параметров тяговых электродвигателей. Осуществляют функцию импульсного подавления автоколебаний для тягового и тормозного режимов работы индивидуального тягового электрического привода как при прямолинейном, так и при криволинейном движении по сигналам от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода и силы тока в любых двух фазах тяговых электродвигателей. Технический результат заключается в повышении энергоэффективности, безопасности и надёжности индивидуального тягового электропривода колеса. 11 ил. 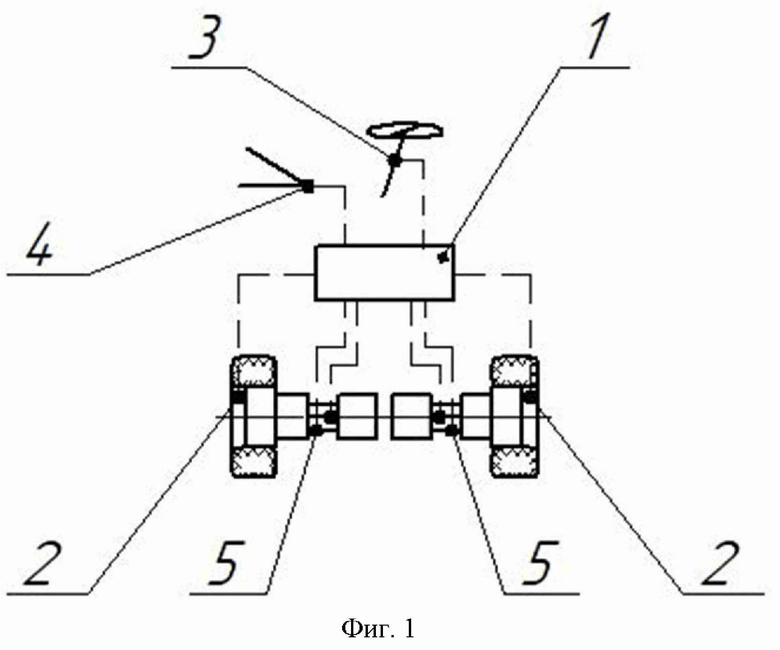
Способ управления тяговыми электродвигателями для индивидуального электропривода ведущих колёс транспортного средства, включающий получение данных от датчиков, согласно которым блок управления задает величины регулируемых по определенному алгоритму параметров тяговых электродвигателей, отличающийся тем, что алгоритм дополнен функцией импульсного подавления автоколебаний для тягового и тормозного режимов работы индивидуального тягового электрического привода как при прямолинейном, так и при криволинейном движении, осуществляемой по сигналам от датчиков угловых скоростей вращения колёс, угла поворота рулевого колеса, положения педали хода и силы тока в любых двух фазах тяговых электродвигателей.
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548832C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |
| US 2017113572 A1, 27.04.2017. | |||
