Изобретение относится к винтокрылым беспилотным летательным аппаратам (БПЛА) с двумя и более винтами, а именно винтокрылым БПЛА с модульным исполнением конструкции аппарата.
Развитие беспилотных летальных аппаратов характеризуется высокой динамичностью - новые решения, как в области конструктивного исполнения и систем управления, так и в области применения, появляются многократно быстрее, нежели в области пилотируемых летательных аппаратов. Такой рост изобретательской активности и последующей постановки на производство обусловлен развитием микроэлектроники и систем связи, а также благодаря революционным достижениям в области материаловедения, которые позволили облегчить конструкции аппаратов. Научно-техническое развитие в этих областях помогло создать востребованные на рынке беспилотные аппараты. Наиболее бурный рост начался во второй половине 2000-х годов в направлении «коптеров», то есть винтокрылых аппаратов с различными вариантами схем по количеству осей. После появления на рынке линейки аппаратов компании MikroKopter, направление стало стремительно развиваться, став параллельной ветвью развития беспилотных аппаратов относительно аппаратов самолетного типа.
Из уровня техники известно множество винтокрылых беспилотных летательных аппаратов (БПЛА), область применения таких аппаратов достаточно широка. Это могут быть задачи связанные с наблюдением и мониторингом, произведением замеров, переноской грузов, видео фиксацией и т.д. Традиционно, подобные типы аппаратов являются дистанционно пилотируемыми. [Беспилотный летательный аппарат (бпла), классификация, Каршов Р.С., Проблемы современной науки и образования Номер: 11 (53) год: 2016 страницы: 38-40]. Однако существуют и решения, работающие автономно, по заданной программе, без участия оператора.
В рамках развития БПЛА, исходя из проблематики обеспечения многофункциональности, улучшения сервисных характеристик и повышения возможности модернизаций в зависимости от выполняемых задач или среды, в которой БПЛА придется выполнять задачи, активно развивается направление модульного исполнения конструкции БПЛА.
Это подтверждается в том числе известными из уровня техники решениями. Например, в патенте на полезную модель [CN 217456330 U, опубликовано 20.09.2022] представлено модульное решение, позволяющее модифицировать БПЛА, придавая ему характерные свойства аппаратов самолетного типа и(или) винтокрылых аппаратов путем вариативного присоединения/отсоединения «крыльев» с винтами. Путем присоединения одних элементов аппарата и отсоединения других осуществляется преобразование между тремя типами аппаратов.
Однако наиболее глубоко проработкам вопрос модульного исполнения именно у аппаратов вертикального взлета и посадки винтокрылого типа. Количество известных решений очень велико, например, широкую популярность на рынке игровых и развлекательных товаров обрел модульный БПЛА Airblock, который представляет собой сотовую конструкцию, все модули которой изготовлены из экстрадированного пенополистирола. К центральному электронному блоку с помощью магнитных защелок крепятся от двух до шести моторных блоков с установленными на двигателях красными и черными пропеллерами. При сборке эти узлы нужно чередовать. Данный аппарат содержит: основной блок летательного аппарата, основной корпус и материнскую плату управления, размещенную в основном корпусе, при этом на основном корпусе предусмотрены магниты и дополнительно предусмотрены пазы соединения и множество роторных систем, при этом каждая из множества роторных систем содержит второй магнит, роторный механизм и защитный кожух ротора, который имеет полую кольцевую конструкцию и закреплен снаружи роторного механизма, при этом второй магнитный носитель прикрепленный к защитной крышке ротора и притягивающий первый магнит, а штифт, соответствующий прорези, дополнительно предусмотрен на защитной крышке ротора, при этом роторная система расположена на основном узле летательного аппарата и электрически соединена с ним посредством взаимодействия штифта с прорезью, а также прикреплена к основному узлу летательного аппарата за счет силы магнитного поля между первым магнитным носителем и вторым магнитным носителем. [WO2017197602, опубликовано 23.11.2017]. Данное решение является весьма интересным, однако относится к игрушкам, а масштабирование конструкции затруднительно.
Известен беспилотный тандемный двухвинтовой летательный аппарат для транспортировки грузов [US 20210163126 A1, опубликовано 03.06.2021], включающий две роторные системы, каждая из которых содержит систему управления и двигатель, приводящий в действие множество лопастей несущего винта. Роторные системы соединены между собой корпусом, который представляет собой трубу или несколько трубок, расположенных в ряд, обеспечивающую жесткость по продольной оси конструкции и прочность. Корпус, соединяющий роторные системы, допускает крутящий момент только на одной оси, вдоль центральной линии расположения роторных систем. Этот допуск на скручивание позволяет системам переднего и заднего несущих винтов вращаться таким образом, что передний и задний несущие винты могут поворачиваться на несколько градусов независимо друг от друга. Это позволяет упростить конструкцию летательного аппарата, повысить прочность без утяжеления и без использования сборных фюзеляжей или рам традиционной конструкции летательного аппарата. Конструкция соединительного корпуса, либо несущие системы могут включать в себя убирающиеся или фиксированные шасси. Роторные системы выполнены модульными, чтобы их можно было разместить на конструкции корпуса разной длины. Это позволяет увеличивать или уменьшать размер летательного аппарата в соответствии с конкретными потребностями применения.
Известен модульный беспилотный летательный аппарат [RU 182586, опубликовано 23.08.2018], выполненный из разъемных плат, соединенных между собой межплатными соединителями с фиксацией и включающих блок управления с основанием в виде платы управления, плату двигателей, расположенную под платой управления, и плату полезной нагрузки, расположенную под платой управления. Платы выполнены осесимметричными, а установка межплатных соединителей на всех платах и двигателей на плате двигателей осуществлена с соблюдением вращательной симметрии, причем соединители для подключения аккумуляторных батарей и внешних управляющих сигналов выполнены соединенными с платой управления через плату двигателей или непосредственно на плате двигателей. Конструкция предложенной модульной БПЛА платформы отличается отсутствием отдельной рамы аппарата, отдельного набора электрических компонентов, модулей и проводки для сборки и монтажа посредством пайки. Вся конструкция выполнена в виде многослойных печатных плат, а платы одновременно являются и силовой несущей конструкцией и содержат в себе электронную схему. Конструкция отличается универсальной модульностью, так как все платы взаимозаменяемы.
Известно беспилотное транспортное средство с аккумуляторным питанием, которое можно переконфигурировать для разных целей [US20210001700A1, опубликовано 07.01.2021]. Квадроторный БПЛА включает усиленный несущий корпус со встроенной батареей (аккумуляторный модуль), два плеча на несущем корпусе, каждое из которых имеет два ротора, модуль управления, установленный на несущем корпусе, модуль полезной нагрузки, установленный на модуле управления, и шасси. Аккумуляторный модуль представляет собой конструкцию, сконфигурированную качестве основного корпуса транспортного средства, включает в себя цилиндрическую конструкцию из углеродных трубок и содержит множество взаимосвязанных стопок последовательно расположенных элементов литиевой батареи, образующих аккумуляторный блок из одной или нескольких батарей, и контроллер батареи. Цилиндрическая форма корпуса обеспечивает высокую прочность и жесткость. Плечи выполнены с возможностью подключения к любому из двух боковых разъемов корпуса. Модуль управления крепится к двум ручкам на корпусе с помощью крюка и защелки на продольных концах модуля управления и корпуса. Модуль полезной нагрузки крепится к переднему концу модуля управления. Благодаря расположению модуля управления над корпусом, а также тому, что корпус защищает модуль управления от высоких нагрузок, повышается долговечность модуля управления, и он не требует собственной жесткой конструкции. Модуль полезной нагрузки прикрепляется к переднему концу модуля управления.
В источнике [Reconfigurable Drone System for Transportation of Parcels With Variable Mass and Size; IEEE Robotics and Automation Letters (Volume: 7, Issue: 4, October 2022) DOI: 10.1109/LRA.2022.3208716] приведен реконфигурируемый беспилотник на основе модульной конструкции. Дрон состоит из восьми силовых модулей и одного вычислительного модуля, прикрепленных к посылке. Силовые модули прикреплены попарно (один перед другим) для создания симметричной морфологии планера октокоптера. Посылка имитируется блоком пенополистирола (100 х 25 х 8 см) весом 420 грамм. Двигательный модуль включает в себя один двигатель, пропеллер, батарею и электронику для управления двигателем. Модуль может быть увеличен в несколько раз, чтобы достичь требований по подъему перевозимой посылки. Вычислительный модуль - это мозг системы, который управляет всеми подключенными модулями через кабели. В этом решении посылка становится корпусом дрона-мультикоптера.
В качестве прототипа рассматривается техническое решение, известное из патента [US 20180022451, опубликовано 25.01.2018]. Настоящая концепция изобретения обеспечивает беспилотный летательный аппарат, имеющий съемные составные элементы, которые легко заменяются при повреждении. Данный беспилотный летательный аппарат выполнен со съемным манипулятором. В соответствии с воплощением концепции настоящего изобретения, даже когда винтокрыл, аккумулятор, двигатель или рычаг повреждены, поврежденная деталь может быть легко заменена без разборки или пайки. В беспилотных летательных аппаратах в соответствии с различными вариантами осуществления, поскольку блок манипулятора сконфигурирован так, чтобы его можно было отсоединить от основного корпуса, когда блок манипулятора поврежден или сломан в результате падения или внешнего удара, блок манипулятора может быть заменен. Аналогично может быть заменен аккумуляторный блок, или основной корпус.
В качестве критики известного технического уровня, и в частности прототипа, необходимо отметить существенный недостаток, обусловленный выстраиванием модульной конструкции вокруг основного корпуса, без использования какой-либо рамы, относительно которой можно осуществлять монтаж всех модульных элементов.
Проблематика, в области которой предлагается представленное далее изобретение - это необходимость упрощения работ с модернизацией или ремонтом БПЛА модульного исполнения, а также создание потенциала увеличения мощности или тяги за счет модернизации по принципу модульной сборки в части мощности за счет увеличения количества винтов без изменений габаритных характеристик аппарата.
Техническим результатом изобретения является создание модульного многофункционального БПЛА с составной рамной конструкцией, а также возможность изменения количества винтов.
Для достижения технического результата решаются следующие задачи: обеспечение модульного принципа конструкции аппарата с возможностью замены отдельных основных модулей или подключения дополнительных различных функциональных модулей; обеспечение увеличения мощности аппарата за счет дополнительных электродвигателей и винтов.
Технический результат достигается следующим образом:
Модульный беспилотный летательный аппарат типа коптер, выполненный по трехосевой схеме, со схемой осей Y, включает вращающие винты, электродвигатели, корпус, аккумуляторную батарею и имеет разделение конструкции по модулям: левый элемент рамы, правый элемент рамы, центральный элемент рамы, нижняя часть корпуса, которая в свою очередь может быть выполнена в виде единого модуля или включать не менее двух отдельных модулей, одним из которых является аккумуляторная батарея, центральная часть корпуса, верхняя часть корпуса электродвигатели и винты. Каждый из модулей может быть заменен по отдельности при необходимости модификации или проведения ремонтных или сервисных работ, каждый из модулей-элементов рамы включает интегрированный элемент конструкции для размещения винта и электродвигателя. Нижняя, верхняя и центральная часть корпуса при монтаже соединяются с рамой и между собой. В каждый элемент рамы может включать один или два винта для изменения тяги аппарата, таким образом, что общее количество винтов аппарата кратно трем. А на фронтальной части аппарата опционально можно расположить или не располагать внешний дополнительный функциональный модуль с подвесным оборудованием.
На фигуре 1 приведен общий вид (эскиз) модульного беспилотного летательного аппарата, где:
1 - Кожух.
2 - Винт.
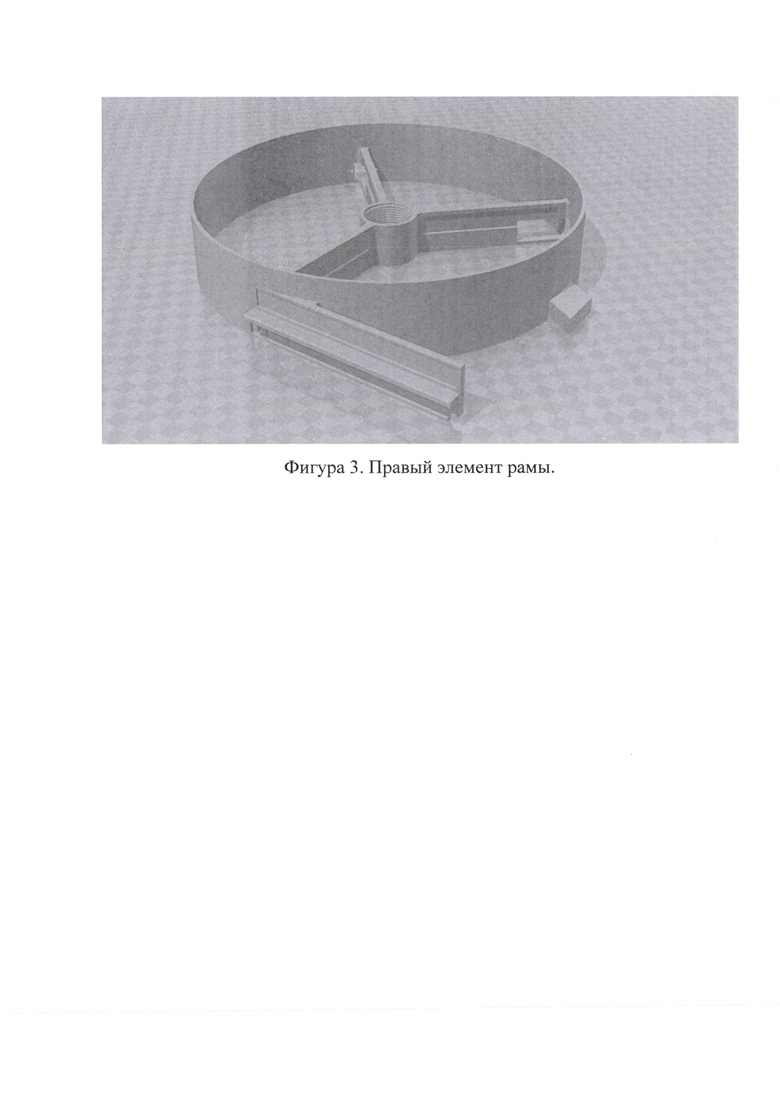
3 - Правый элемент рамы.
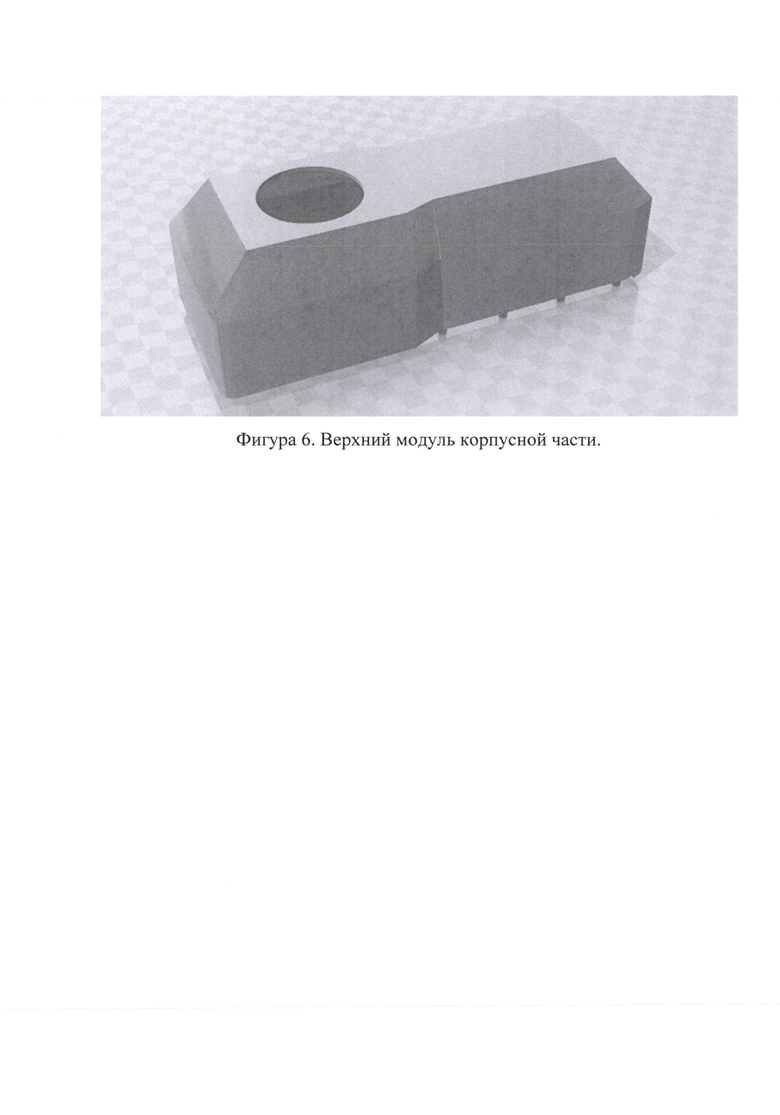
4 - Верхний модуль корпусной части.
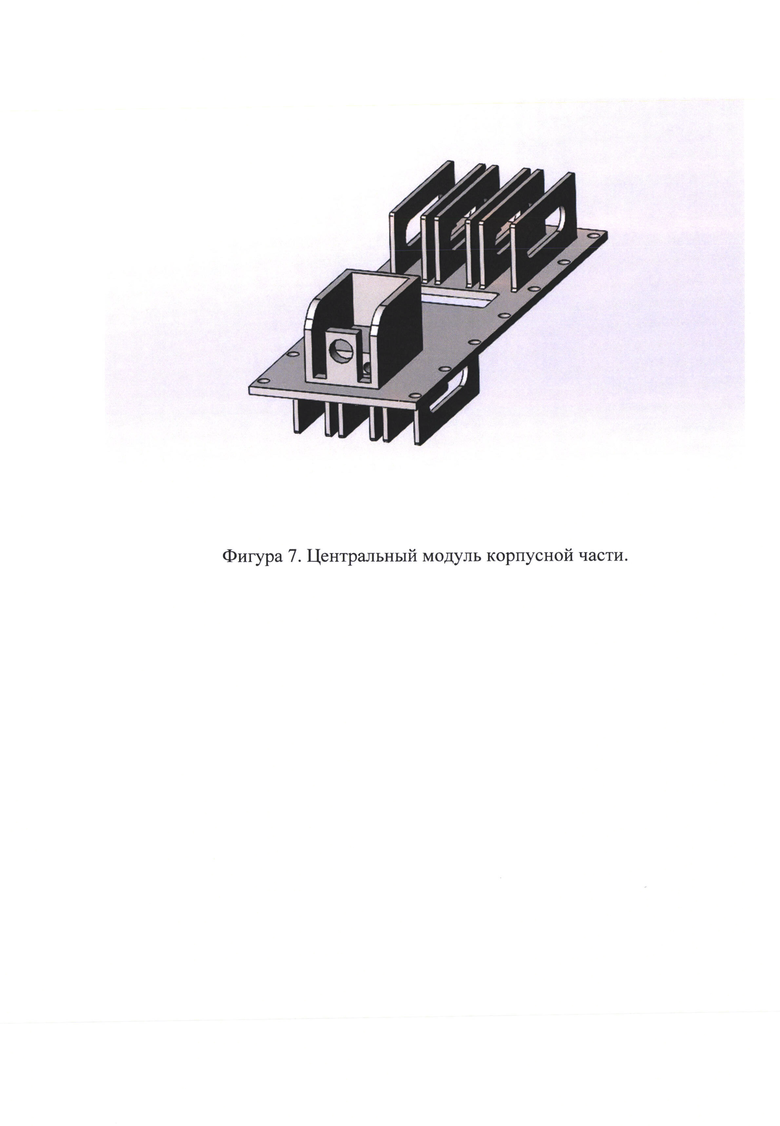
5 - Центральный модуль корпусной части.
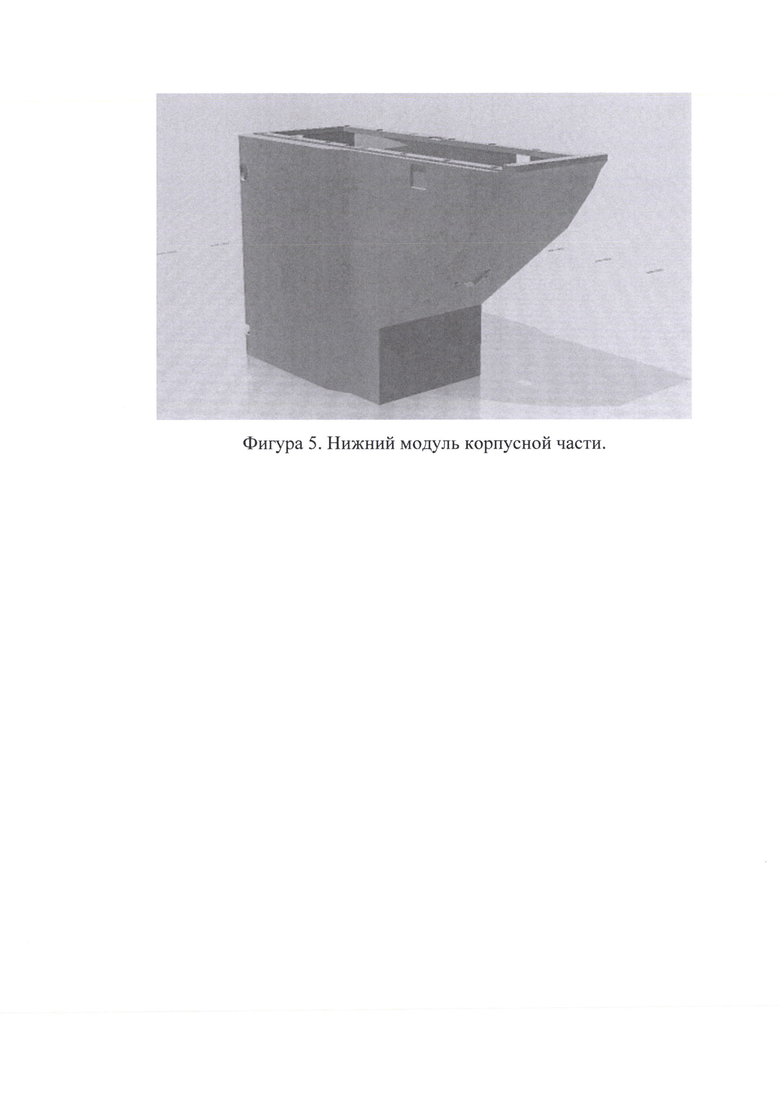
6 - Нижний модуль корпусной части.
7 - Шасси.
Для иллюстрации основного принципа модульной сборки разделенного на модули аппарата приведены фигуры 2-7, где изображены модули по отдельности, без наполнения оборудованием (приборами, датчиками, элементами соединения и фурнитурой).
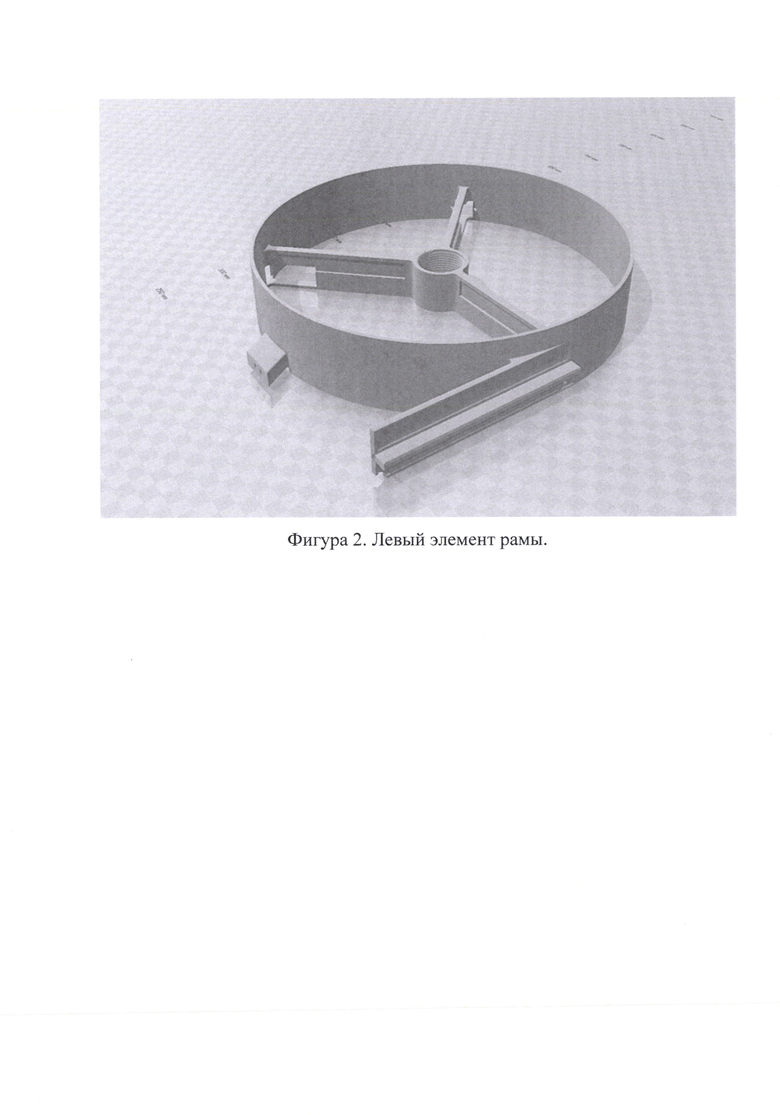
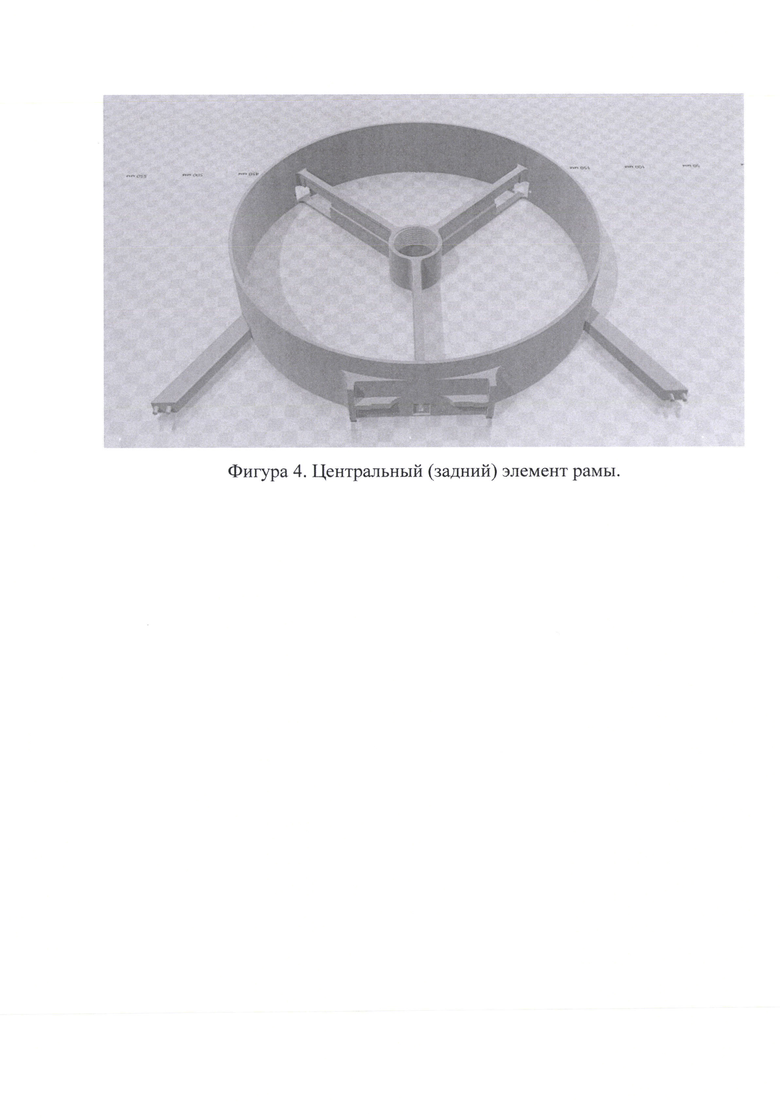
Фигуры 2, 3, 4 иллюстрируют левый, правый и центральный элемент рамы с интегрированными элементами конструкции для размещения винта и электродвигателя. Каждый из этих элементов является отдельным модулем.
Фигура 5 иллюстрирует модуль - нижняя часть корпуса.
Фигура 6 иллюстрирует модуль - верхняя часть корпуса.
Фигура 7 иллюстрирует модуль - центральная часть корпуса.
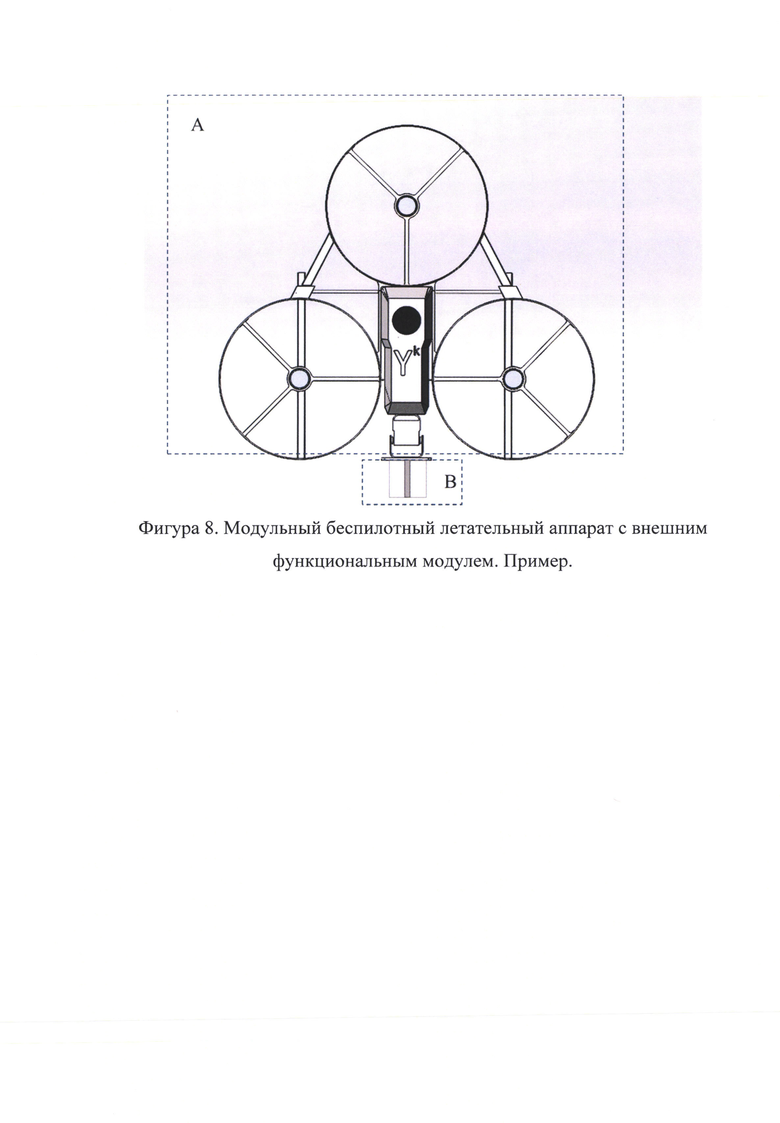
Пример расположения внешнего конфигурируемого подвесного модуля изображен на фигуре 8, где:
А - модульный беспилотный летательный аппарат;
Б - закрепленный с фронтальной стороны аппарата внешний функциональный модуль.
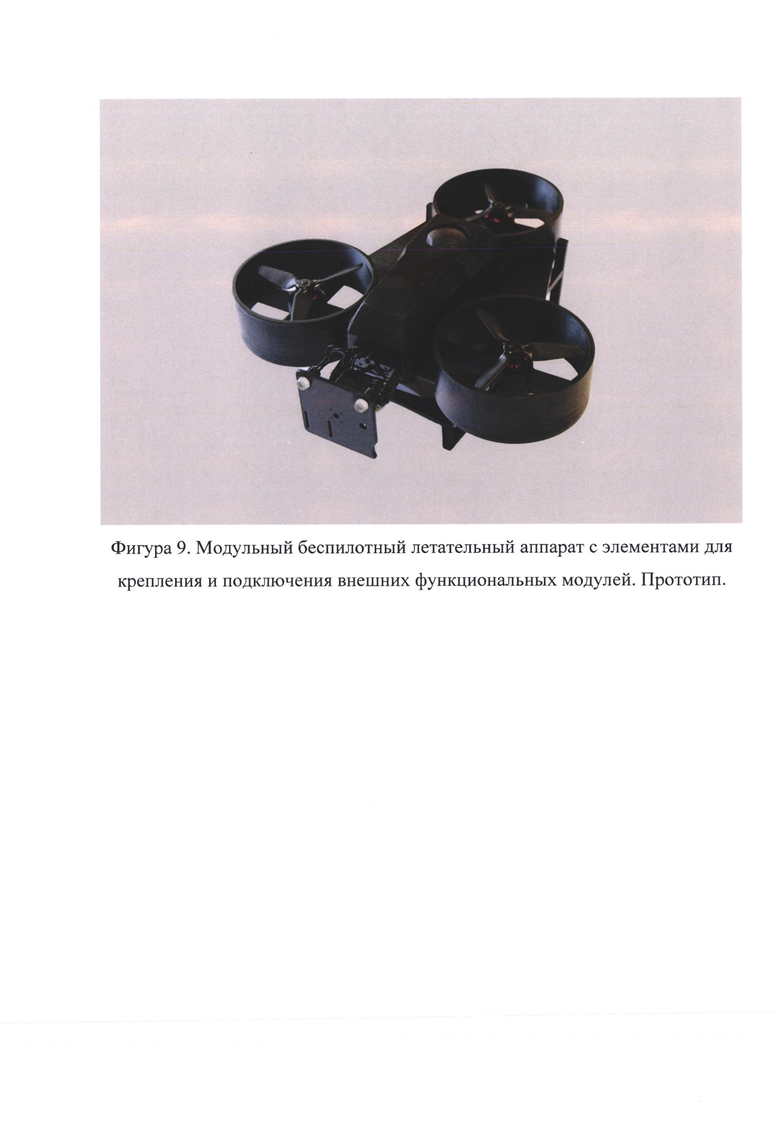
Фигуру 8 дополняет изображение прототипа аппарата на фигуре 9 с элементами для крепления и подключения внешних функциональных модулей.
Модульный беспилотный летательный аппарат устроен следующим образом.
Модульный беспилотный летательный аппарат типа коптер, выполнен по трехосевой схеме, со схемой осей Y. Рамная конструкция, улучшающая прочностные и эксплуатационные характеристики, а также исключающая риск выхода из строя аппарата из-за потери одного из модулей вследствие поломки элементов крепления является составной. Наличие единой жесткой рамы не только утяжелило бы конструкцию аппарата, но и затруднило бы ремонтные или модификационные работы ввиду необходимости рассоединения всех модулей в случае необходимости замены такой рамы. Таким образом рама образуется соединением модулей левый (фиг. 2), правый (поз.3, а также фиг. 3) и центральный элемент рамы (фиг. 4) с интегрированными элементами конструкции для размещения винта и электродвигателя. В качестве интегрированного элемента конструкции для размещения винта и электродвигателя выступает кожух, неразъемно соединенный с направляющими. При соединении направляющих между собой основа конструкции рамы приобретает форму незамкнутого треугольника, то есть форму «V», с тремя тяговыми винтами на углах. А общая конструкция рамы представляет собой соединенные воедино все кожухи и направляющие. Кожух, как составляющая часть каждого элемента рамы также сам по себе сконструирован по принципу модульности, состоит из двух неразъемных частей и одного разъемного. Неразъемные элементы это оболочка кожуха со стойками (лучами) и посадочное гнездо под двигатель. Посадочное гнездо имеет внутреннюю резьбу для ввинчивания посадочного стакана двигателя, являющегося разъемным элементом кожуха. Данное решение позволяет при выходе из строя одного из двигателей, заменить только этот двигатель не меня весь элемент (кожух) полностью.
Каждый модуль-элемент рамы, включающий интегрированный элемент конструкции для размещения электродвигателя и винта - посадочное гнездо, может быть выполнен как с размещением одного электродвигателя и одного винта, так и с размещением двух электродвигателей и двух винтов. Для чего соответственно в посадочное гнездо устанавливается один или два посадочных стакана. В случае установки двух посадочных стаканов, они устанавливаются сверху и снизу относительно лучей, соединяющих оболочку кожуха с посадочным гнездом. При этом при в двух различных исполнениях также отличным будет являться и габаритное исполнение кожуха - для варианта исполнения с двумя винтами кожух будет выше для сохранения защитной функции и снижения риска прямого контакта вращающего винта с внешними предметами, а глубина посадочного гнезда будет больше. При решении задачи увеличения тяговой мощности аппарата производится единовременная замена всех трех элементов, включающих электродвигатели и винты, то есть исполнение модульного беспилотного летательного аппарата в целом возможно с тремя или шестью винтами. Для обеспечения стабильной аэродинамики модульного беспилотного летательного аппарата каждый из винтов как при схеме с тремя, там и при схеме с шестью винтами расположены в одной плоскости друг с другом.
Корпус аппарата состоит из трех модулей: нижней (6), верхней (4) и центральной части (5). Центральная часть (5) выполнена по принципу открытого типа, то есть располагаемое на ней оборудование дополнительно не закрывается от воздействия внешней среды, однако нижняя (6) и верхняя (4) части корпуса выполняют роль верхней и нижней крышки, накрывая центральную часть снизу и сверху соответственно. Нижняя, верхняя и центральная часть корпуса при монтаже соединяются с рамой и между собой. При этом корпус как единый блок автономен относительно рамы при условии отсоединения крепления от рамы, что позволяет вынуть из рамы и вставить корпус обратно в раму в случае принципиальной смены задач выполняемых модульным БПЛА, то есть произвести замену корпуса со всем его наполнением на той же раме с винтами, или заменить корпус полностью или частично при поломке или повреждении. Верхняя часть корпуса (4) несет на себе оборудование связи и солнечную панель поддержки заряда при выполнении длительных миссий, каждый из этих элементов может быть заменен как без замены верхней части корпуса, так и в составе таковой как единого блока. Центральная часть (5) несет на себе микроэлектронное микропроцессорное оборудование анализа, принятия решений и управления модульным БПЛА, может отсоединяться и заменяться полностью как единый блок. Отдельные элементы центральной части (5), например, регуляторы скорости двигателей, накопители данных, цпу, приводы управления, датчики, могут заменяться отдельно без замены центральной части (5). Нижняя часть корпуса (6) несет на себе аккумуляторный блок и аппаратуру для выполнения задач модульного БПЛА, может заменяться отдельно от прочих модулей.
Аккумуляторный блок и аппаратура для выполнения задач способна заменяться также отдельно. Нижняя часть корпуса представляет из себя структурно также модульную конструкцию. Комплексно модуль-нижняя часть корпуса (6) прикрепляется к мостику и состыковывается с верхней часть корпуса, образуя непосредственно корпус, встраиваемый в раму. Структурно нижняя часть корпуса состоит из двух элементов: передний модуль нижней части корпуса размещает в себе оборудование; хвостовой модуль нижней части корпуса включает интегрированную аккумуляторную батарею, что позволяет производить замену батарей кассетно.
Для обеспечения функционирования модульный беспилотный летательный аппарат имеет систему управления, для работы которой предусмотрен центральный процессор, соединенный с аккумуляторной батареей, радиодатчиком, лидарами, GPS или GLONASS оборудованием, с программируемой системой принятия решений, а также с парой подвижных поднимающихся шасси, расположенных справа и слева на корпусе.
Подход разработки конструкции модульного БПЛА согласно изобретению распространяется на каждый элемент и узел. Шасси (7) выполнено в виде конструкции типа «лыжа», данное конструктивное выполнение посадочных опор исключают опрокидывание аппарата после его приземления на поверхность, которая может быть как горизонтальной, так и располагаться под малым наклоном. Помимо этого, подобная конструкция позволяет одновременно обеспечить увеличение площади контакта с поверхностью и интегрировать в конструкцию антенны передачи телеметрии, которые находятся в оптимальном положении при сложенном шасси.
Шасси (7) могут заменяться как единый узел, так и поэлементно: стойка шасси, поворотный механизм, привод управления.
На фронтальной части аппарата опционально можно расположить или не располагать внешний дополнительный функциональный модуль с подвесным оборудованием. Дополнительный функциональный модуль с подвесным оборудованием (В) также является автономным узлом заменяемым при поломке. Дополнительный функциональный модуль с подвесным оборудованием (В) универсален, конструкция включает в себя посадочные элементы собранные таким образом, что позволяет, например, расположить камеру, типичную для дронов совместно с камерой инфоркарасного диапазона или тепловизором, устройство для измерения износа и прочности конструкций в сочетании с камерой на выбор из представленного выше ряда, мрт для проверки стыков, например, железнодорожных путей или магистральных труб в сочетании с устройством из выше представленного ряда. Важным критерием является то, что модельный ряд устройств подобран таким образом, что смена таковых не влияет на центр масс и полетное время. Навесное оборудование в частности может быть следующее:
1) камера;
2) магнитно-резонансный томограф;
3) измеритель толщин;
4) тепловизор;
5) фемтосота.
Крепление модулей обеспечивается следующим образом: помимо соединения между собой направляющих модулей рамы, с образованием рамы в форме незамкнутого треугольника, каждая из направляющих выполнена с пазами для соединения с модулями корпусной части аппарата, помимо этого для фиксации используется стандартная фурнитура. Вышеупомянутый передний модуль нижней части корпуса размещает в себе оборудование и является логическим продолжением подвеса, например, подвес располагает камеру и измерительный щуп, а в передний блок убирается анализатор - прибор, анализирующий значения получаемые от щупа. Передний блок может быть адаптирован под оборудование, например, аппарат МРТ и др.
Модульный беспилотный летательный аппарат функционирует следующим образом.
Производится сборка необходимой комплектации беспилотного летательного аппарата. Соединяются между собой и фиксируются крепежными элементами модули, составляющие раму: центральная, правая и левая. В гнезда каждого кожуха ввинчиваются стаканы. Устанавливаются электродвигатели. В середину рамы устанавливается модуль - центральная часть корпуса. Устанавливается нижняя часть корпуса как единый модуль или как два отдельных элемента, соединяющиеся между собой, с рамой и с центральной частью корпуса. Монтируется верхняя часть корпуса. При необходимости установки внешнего оборудования на фронтальную часть беспилотного летательного аппарата - устанавливается таковое. Попутно со сборкой производится соединение разъемов питания и управления.
Основным элементом питания выступает аккумуляторная батарея, интегрированная в модуль - нижнюю часть корпуса. Система управления базируется на совокупности датчиков и микроэлектронных приборов, управляемых микропроцессорным оборудованием, расположенном в корпусе, а именно на центральном модуле корпусной части. Поступление соответствующих сигналов из микропроцессорного оборудования, реализующего программы и алгоритмы работы модульного беспилотного летательного аппарата приводит в движение валы электродвигателей и, соответственно, винты, вследствие чего аппарат поднимается в воздух, набирает высоту и приступает к выполнению поставленных задач.
При наборе высоты шасси аппарата складываются автоматически.
По поступлении той или иной команды согласно выполняемому сценарию в систему принятия решений (элемент программной архитектуры, обеспечиваемый микроэлектронным оборудованием аппарата) включается опрос датчиков: радио датчик, датчик шасси, GPS/GLONASS, системы позиционирования, лидаров или датчиков вариативно устанавливаемых дополнительных функциональных модулей с подвесным оборудованием. Результаты опроса датчиков поступают в систему принятия решений. Данные обрабатываются асинхронно. По результатам обработки данных модульный беспилотный летательный аппарат перемещается в пространстве, задействует оборудование дополнительных функциональных модулей и осуществляет посадку. Более детальное рассмотрение алгоритмов работы электронных систем аппарата не является актуальным в целях настоящего изобретения.
Обоснование промышленной применимости и достижение технического результата.
Модульность представленного в настоящем изобретении модульного беспилотного летательного аппарата, достигается благодаря созданию каждого модуля основываясь на принципе закрытой архитектуры, подключаемого в единую сложную, динамическую систему по pin принципу. Например, чтобы заменить двигатель, нужно отключить разъемы под посадочным гнездом, выкрутить посадочный стакан с двигателем, заменить двигатель, вкрутить заменный посадочный стакан с двигателем в посадочное гнездо, подключить разъемы. Аналогичный принцип характерен и для прочих элементов модульной конструкции: замена и перекомплектация включает два типа операций - отключение/подключение разъемов на линиях питания и управления и механическое отсоединение/соединение элементов крепления. При этом все разъемы маркированы во избежание ошибок и обеспечения правильного подключения. Улучшение характеристик в части увеличения тяговой мощности модульного беспилотного летательного аппарата обеспечивается возможностью исполнения с 3 и 6 двигателями. Данная возможность поддерживается аппаратной-программной платформой и моделью поведения, управляющей полетными миссиями и сценариями модульного беспилотного летательного аппарата. Каждый модуль как единая система и как отдельный, равнозаменяемый - pin to pin элемент системы, находится под управлением программно-аппаратного микроэлектронного комплекса оборудования, что позволило реализовать метод обратного распространения потенциальной ошибки и метода конечных элементов, связав 3D и CAD среду разработки с самим модульным беспилотным летательным аппаратом. Например, программно-аппаратное оборудование модульного беспилотного летательного аппарата фиксирует температуру на корпусе в центральной части корпуса и температуру среды локализации, чтобы создать тепловую карту, соотносит с характеристиками основного и изоляционного материалов выносит поправку по материалу при проектировании рамы, корпуса, шасси и подвеса; измеряет скорость ветра, направление и работу двигателей, частоту повторения данных событий возникающих в среде локализации, соотнося с геометрией корпуса и мощностью двигателей, вносит поправку в геометрию и список набора комплектующих при проектировании рамы, корпуса, обводов - это позволяет учесть отдельные нюансы по применяемым материалам для целей и задач в тех или иных условиях и, в частности, основываясь на опыте применения единицы модульного беспилотного летательного аппарата провести оперативную доработку отдельного модуля или модулей для последующей замены на отдельном модульном беспилотном летательном аппарате (вместо изготовления нового оптимизированного аппарата). При этом в случае применения новых материалов для изготовления отдельных элементов того или иного модуля, или в случае изменения геометрии, CAE среда разработки позволяет смоделировать и прочие характеристики для сбалансированного набора тактико-технических характеристик. Таким образом, например, при применении более тяжелых материалов для одного из модулей, просчитывается и балансировка для сохранения центра масс, и изменения в скорости, максимальном времени полета и прочих характеристиках.
Для изготовления аппарата используются стандартные приборы, аппараты и материалы. В качестве микропроцессора, например, может использоваться STM32H745ZIT производства STMicroelectronics или любой аналог соответствующего функционала и производительности. Микропроцессор соединен с датчиками, которые передают информацию для принятия решения, а именно: радиолокационным датчиком и лидарами. В качестве радиолокационного датчика может быть использован, например, ультразвуковой датчик HC-SR04. В качестве лидаров могут быть использованы, например, ToF лидары. Все датчики закреплены на корпусе летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО САМОЛЕТНОГО ТИПА | 2024 |
|
RU2839005C1 |
| МОДУЛЬ МАРШЕВОГО ДВИГАТЕЛЯ С ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2834328C1 |

Модульный беспилотный летательный аппарат содержит раму, корпус и шасси. Рама образована соединением модулей левого, правого и центрального ее элементов по трем осям со схемой осей Y, при этом каждый элемент рамы выполнен с возможностью размещения на нем одного или двух электродвигателей и винтов, закрытых кожухами, общее число которых кратно трем. Корпус содержит три модуля, верхней, нижней и центральной части, соединенные с рамой и между собой. Центральная часть содержит микроэлектронное микропроцессорное оборудование, выполненное в виде единого блока с возможностью его замены. Нижняя часть содержит как минимум аккумуляторную батарею. Шасси выполнено в виде по меньшей мере двух опор. Обеспечивается увеличение мощности и функциональности аппарата за счет возможности замены отдельных модулей и увеличения количества электродвигателей и винтов. 8 з.п. ф-лы, 9 ил.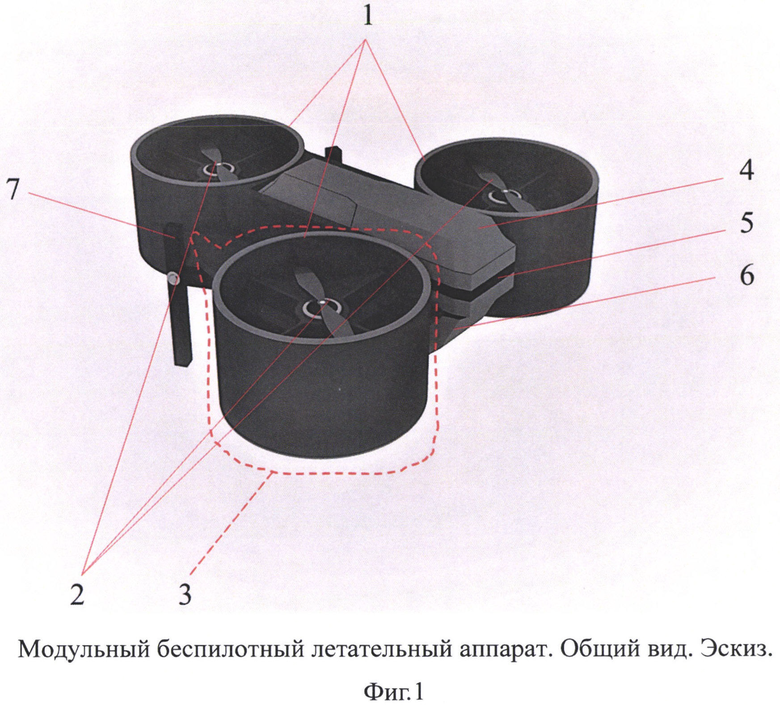
1. Модульный беспилотный летательный аппарат, содержащий
раму, образованную соединением модулей левого, правого и центрального ее элементов по трем осям со схемой осей Y, при этом каждый элемент рамы выполнен с возможностью размещения на нем одного или двух электродвигателей и винтов, закрытых кожухами, общее число которых кратно трем;
корпус, содержащий три модуля, верхней, нижней и центральной части, при этом центральная часть несет на себе микроэлектронное микропроцессорное оборудование анализа, принятия решений и управления модульным БПЛА, которое может отсоединяться и заменяться как единый блок, а нижняя часть включает по меньшей мере аккумуляторную батарею; нижняя центральная и верхняя части корпуса при монтаже соединяются с рамой и между собой;
шасси, выполненное в виде по меньшей мере двух опор.
2. Модульный беспилотный летательный аппарат по п. 1, в котором на фронтальной части аппарата имеются крепления и контакты для питания и управления для внешнего вариативно заменяемого функционального модуля.
3. Модульный беспилотный летательный аппарат по п. 1, в котором интегрированный в модуль рамы элемент конструкции для размещения винта включает оболочку кожуха со стойками и посадочным гнездом под двигатель, при этом посадочное гнездо имеет внутреннюю резьбу для ввинчивания посадочного стакана двигателя.
4. Модульный беспилотный летательный аппарат по п. 1, в котором нижняя, верхняя и центральная часть корпуса при монтаже соединяются с рамой и между собой, при этом корпус как единый блок автономен относительно рамы при условии отсоединения крепления от рамы.
5. Модульный беспилотный летательный аппарат по п. 1, в котором располагаемое на центральной части корпуса оборудование дополнительно не закрывается от воздействия внешней среды, однако нижняя и верхняя части корпуса выполняют роль верхней и нижней крышки, накрывая центральную часть снизу и сверху соответственно.
6. Модульный беспилотный летательный аппарат по п. 1, в котором центральная часть несет на себе микроэлектронное микропроцессорное оборудование анализа, принятия решений и управления модульным БПЛА, может отсоединяться и заменяться полностью как единый блок, но отдельные элементы центральной части, в частности регуляторы скорости двигателей, накопители данных, цпу, приводы управления, датчики, могут заменяться отдельно без замены всей центральной части.
7. Модульный беспилотный летательный аппарат по п. 1, шасси которого оборудованы подъемным механизмом и включают стойку шасси, привод, поворотный механизм, и выполнены с возможностью заменяться как единый узел либо поэлементно.
8. Модульный беспилотный летательный аппарат по п. 1, в котором верхняя часть корпуса включает оборудование связи и солнечную панель поддержки заряда при выполнении длительных миссий, каждый из этих элементов может быть заменен как без замены верхней части корпуса, так и в составе таковой как единого блока.
9. Модульный беспилотный летательный аппарат по п. 1, в котором, в частности, в качестве дополнительного функционального модуля на фронтальной части аппарата может быть установлен магнитно-резонансный томограф, или измеритель толщин, или тепловизор, или фемтосота, или камера.
| CN 107571990 A, 12.01.2018 | |||
| EP 3067273 A1, 14.09.2016 | |||
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| СПОСОБ СТАБИЛИЗАЦИИ АМПЛИТУДЫ КОЛЕБАНИЙ ХРОНИРУЮЩЕГО СИГНАЛА | 0 |
|
SU181389A1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |

